Цифровая схемотехника и архитектура компьютера. Проектирование последовательностной логики. (Глава 3)
- Цифровая схемотехника и архитектура компьютера. Проектирование последовательностной логики. (Глава 3)

Содержание
- 2. Цифровая схемотехника и архитектура компьютера Эти слайды предназначены для преподавателей, которые читают лекции на основе учебника
- 3. Благодарности Перевод данных слайдов на русский язык был выполнен командой сотрудников университетов и компаний из России,
- 4. Глава 3 :: Темы Введение Защелки и Триггеры Проектирование синхронных логических схем Конечные автоматы Синхронизация последовательностных
- 5. Выходы последовательностной схемы зависят как от текущих, так и от прошлых значений на входах - схема
- 6. Выдают последовательность событий Имеют (краткосрочную) память Для сохранения информации используют обратную связь с выходов на входы
- 7. Состояние схемы влияет на ее будущее поведение Элементы хранят состояние схемы Бистабильная схема RS-триггер D-защелка D-триггер
- 8. Основной блок для построения других элементы, хранящих состояние Два выхода: Q, Q Входов нет Бистабильная схема
- 9. Рассмотрим два возможных случая: Q = 0: Тогда Q = 1, Q = 0 (нет противоречия)
- 10. RS-триггер Рассмотрим четыре возможные случая: S = 1, R = 0 S = 0, R =
- 11. S = 1, R = 0: Тогда Q = 1 и Q = 0 S =
- 12. S = 0, R = 0: Тогда Q = Qprev S = 1, R = 1:
- 13. S = 0, R = 0: Тогда Q = Qprev Память! S = 1, R =
- 14. RS обозначает триггер со входами Reset/Set, Сброс/Установка Хранит один бит состояния (Q) Хранимое значение определяется входами
- 15. Два входа CLK, D CLK: определяет когда выход изменяется D (вход данных): определяет новое значение выхода
- 16. Внутренняя структура D защелки
- 17. Внутренняя структура D защелки
- 18. Входы: CLK, D Работа Фиксирует значение D по переднему фронту CLK Когда CLK изменяется от 0
- 19. Две последовательно соединенные защелки (L1 и L2), которые управляются комплементарными тактовыми сигналами Когда CLK = 0
- 20. Сравнение D-защелки и D-триггера
- 21. Сравнение D-защелки и D-триггера
- 22. Регистры
- 23. Входы: CLK, D, EN Вход разрешения (EN) контролирует, будут ли сохраняться новые данные (D) Работа EN
- 24. Входы: CLK, D, Reset Работа Reset = 1: Q устанавливается в 0 Reset = 0: Триггер
- 25. Два типа: Синхронный: Сброс происходит только по фронту тактового сигнала Асинхронный: сброс происходит сразу после установки
- 26. Два типа: Синхронный: Сброс происходит только по фронту тактового сигнала Асинхронный: сброс происходит сразу после установки
- 27. Входы: CLK, D, Set Работа: Set = 1: Q устанавливается в 1 Set = 0: Триггер
- 28. Последовательностные схемы - все схемы, которые не являются комбинационными Проблемная схема: Последовательностные цифровые схемы
- 29. Последовательностные схемы - все схемы, которые не являются комбинационными Проблемная схема: Входов нет, выходов 3 Нестабильная
- 30. Разрушение циклических путей с путем добавления регистров Регистры сохраняет состояние схемы Состояние изменяется по фронтам тактового
- 31. Состоят из: Регистра состояний Хранит текущее состояние По фронту тактового импульса загружает следующее состояние Комбинационной логической
- 32. Следующее состояние определяется входами и текущим состоянием Два класса конечных автоматов отличаются логикой определения выходных сигналов:
- 33. Система управления светофором Датчики движения: TA, TB (ИСТИНА, когда на улице есть студенты) Светофоры: LA, LB
- 34. Входы: CLK, Reset, TA, TB Выходы: LA, LB Черный ящик конечного автомата
- 35. Конечный автомат Мура: Значения выходов указаны для каждого состояния Состояния: Кружки Переходы: Дуги Диаграмма переходов конечного
- 36. Конечный автомат Мура: Значения выходов указаны для каждого состояния Состояния: Кружки Переходы: Дуги Диаграмма переходов конечного
- 37. Таблица переходов конечного автомата
- 38. Таблица переходов конечного автомата
- 39. Таблица переходов конечного автомата с указанием кодирования
- 40. S'1 = S1 ⊕ S0 S'0 = S1S0TA + S1S0TB Таблица переходов конечного автомата с указанием
- 41. Таблица выходов конечного автомата
- 42. LA1 = S1 LA0 = S1S0 LB1 = S1 LB0 = S1S0 Таблица выходов конечного автомата
- 43. Схема конечного автомата: Регистр состояний
- 44. Схема конечного автомата: Логика следующего состояния
- 45. Схема конечного автомата: Выходная логика
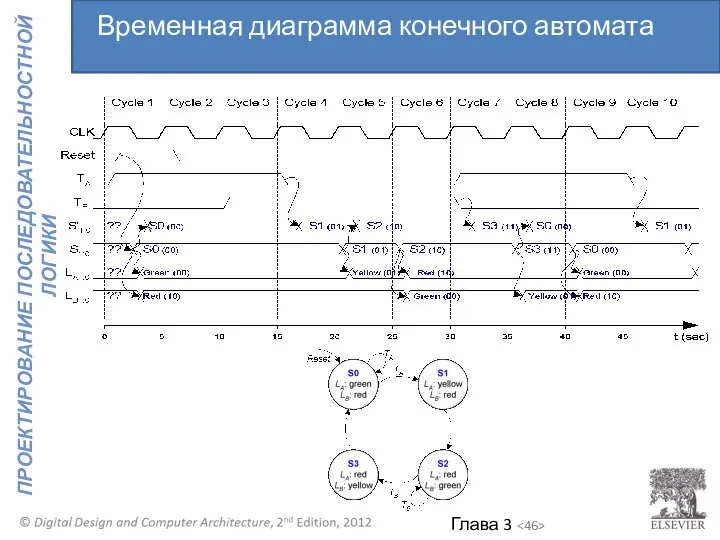
- 46. Временная диаграмма конечного автомата
- 47. Двоичное кодирование: Для четырех состояний: 00, 01, 10, 11 Прямое (One-hot) кодирование На каждое состояние один
- 48. У Алисы есть улитка, которая ползает по перфоленте, содержащей последовательность нулей и единиц. Улитка улыбается, если
- 49. Конечный автомат Мили: около дуг указаны значения входов/выходов Диаграмма переходов
- 50. Таблица переходов конечного автомата Мура
- 51. Таблица переходов конечного автомата Мура S1’ = S0A S0’ = A
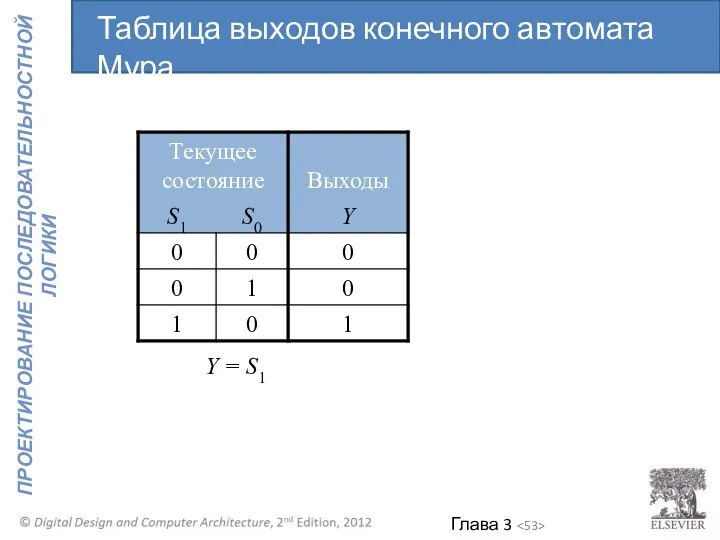
- 52. Y = S1 Таблица выходов конечного автомата Мура
- 53. Y = S1 Таблица выходов конечного автомата Мура
- 54. Таблица переходов и выходов конечного автомата Мили
- 55. Таблица переходов и выходов конечного автомата Мили
- 56. Схема конечного автомата Мура
- 57. Схема конечного автомата Мили
- 58. Временные диаграммы конечных автоматов Мура и Мили
- 59. Разделение сложного конечного автомата на более простые взаимодействующие конечный автоматы Пример: Модифицируйте контроллер светофора так, чтобы
- 60. Немодульный конечный автомат Модульный конечный автомат Модифицированный конечный автомат
- 61. Немодульный конечный автомат
- 62. Модульный конечный автомат
- 63. Определите входы и выходы Нарисуйте диаграмму переходов Запишите таблицу переходов Выберите способ кодирования состояний Для конечного
- 64. Триггер фиксирует сигнал D по фронту тактового сигнала Сигнал D должен быть стабильным в процессе фиксации
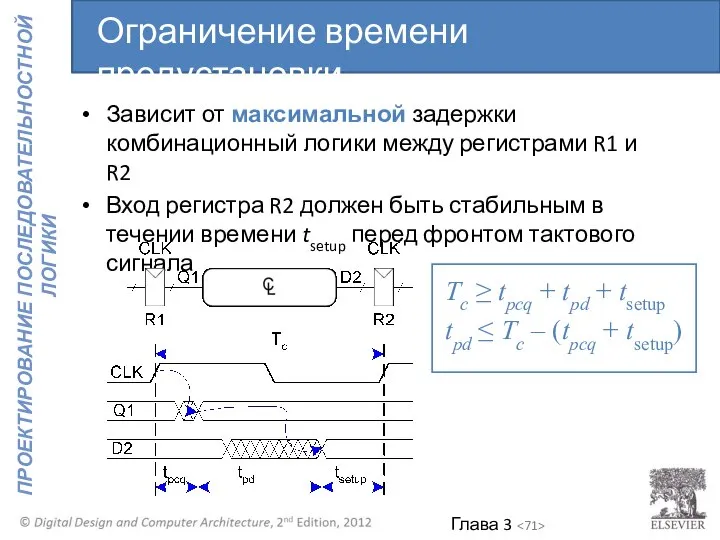
- 65. Время предустановки: tsetup = период времени перед фронтом тактового сигнала, в течении которого данные должны быть
- 66. Задержка распространения tpcq = период времени после фронта тактового сигнала, после окончания которого выход Q будет
- 67. Входы синхронной последовательностной схемы должны быть стабильны в течение апертурного времени в окрестности фронта тактового сигнала
- 68. В зависимости от задержек элементов, общая задержка между регистрами лежит между максимальным и минимальным значениями Динамическая
- 69. Зависит от максимальной задержки комбинационный логики между регистрами R1 и R2 Вход регистра R2 должен быть
- 70. Зависит от максимальной задержки комбинационный логики между регистрами R1 и R2 Вход регистра R2 должен быть
- 71. Зависит от максимальной задержки комбинационный логики между регистрами R1 и R2 Вход регистра R2 должен быть
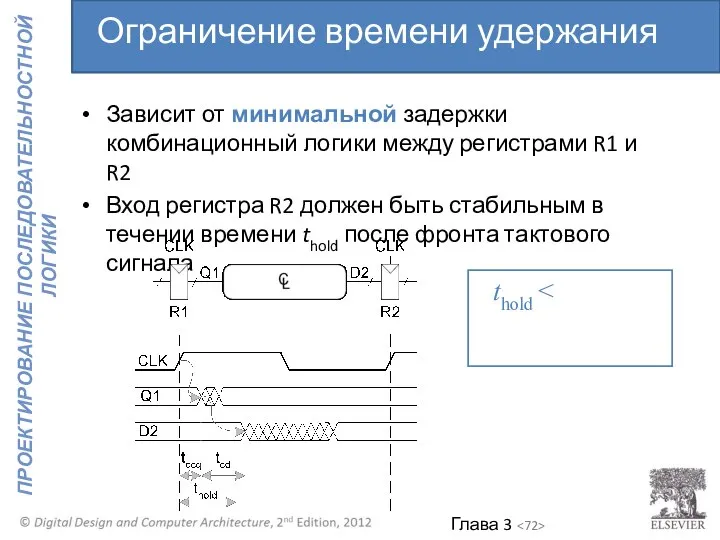
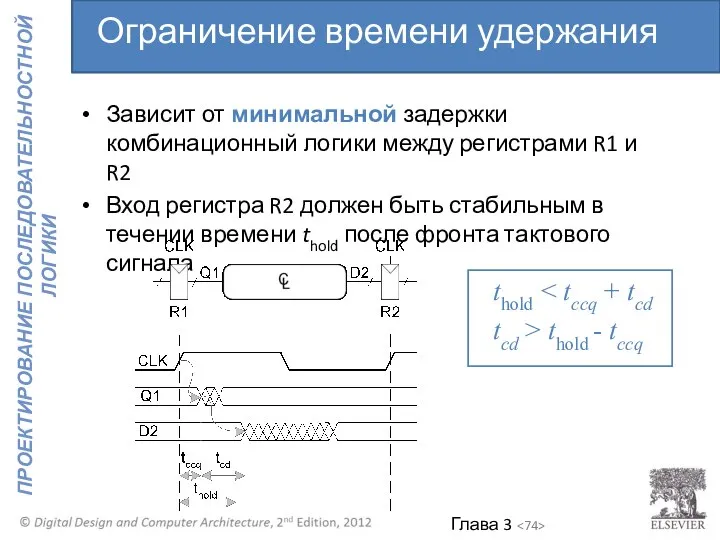
- 72. Зависит от минимальной задержки комбинационный логики между регистрами R1 и R2 Вход регистра R2 должен быть
- 73. Зависит от минимальной задержки комбинационный логики между регистрами R1 и R2 Вход регистра R2 должен быть
- 74. Зависит от минимальной задержки комбинационный логики между регистрами R1 и R2 Вход регистра R2 должен быть
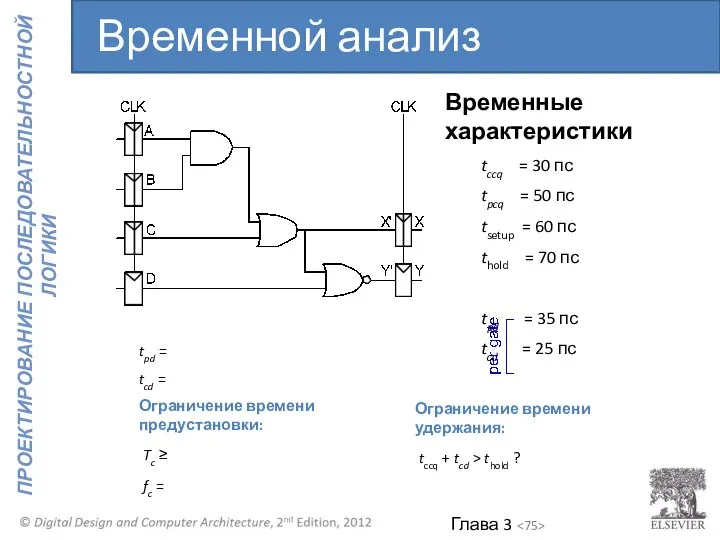
- 75. Временные характеристики tccq = 30 пс tpcq = 50 пс tsetup = 60 пс thold =
- 76. Временные характеристики tccq = 30 пс tpcq = 50 пс tsetup = 60 пс thold =
- 77. Временные характеристики tccq = 30 пс tpcq = 50 пс tsetup = 60 пс thold =
- 78. Временные характеристики tccq = 30 пс tpcq = 50 пс tsetup = 60 пс thold =
- 79. Тактовые импульсы поступают на разные регистры схемы не одновременно Расфазировка: различие во времени между фронтами тактовых
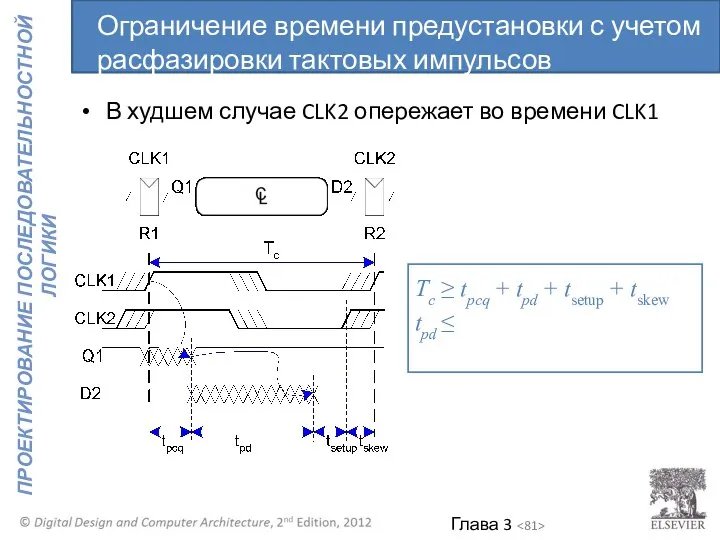
- 80. В худшем случае CLK2 опережает во времени CLK1 Tc ≥ Время предустановки с учетом расфазировки тактовых
- 81. В худшем случае CLK2 опережает во времени CLK1 Tc ≥ tpcq + tpd + tsetup +
- 82. В худшем случае CLK2 опережает во времени CLK1 Tc ≥ tpcq + tpd + tsetup +
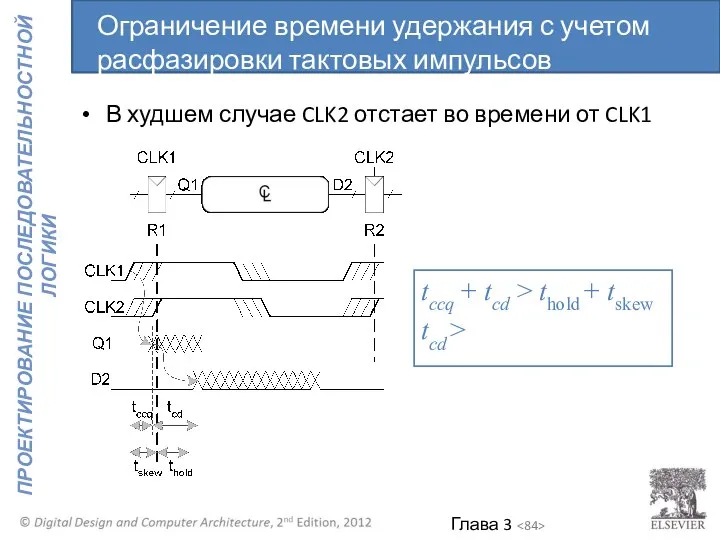
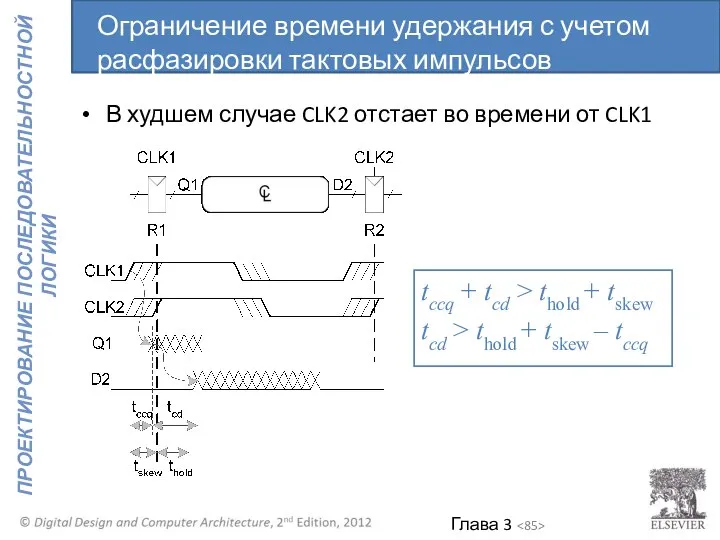
- 83. В худшем случае CLK2 отстает во времени от CLK1 tccq + tcd > Ограничение времени удержания
- 84. В худшем случае CLK2 отстает во времени от CLK1 tccq + tcd > thold + tskew
- 85. В худшем случае CLK2 отстает во времени от CLK1 tccq + tcd > thold + tskew
- 86. Асинхронные (например пользовательские) входы могут приводить к нарушению динамической дисциплины Нарушение динамической дисциплины
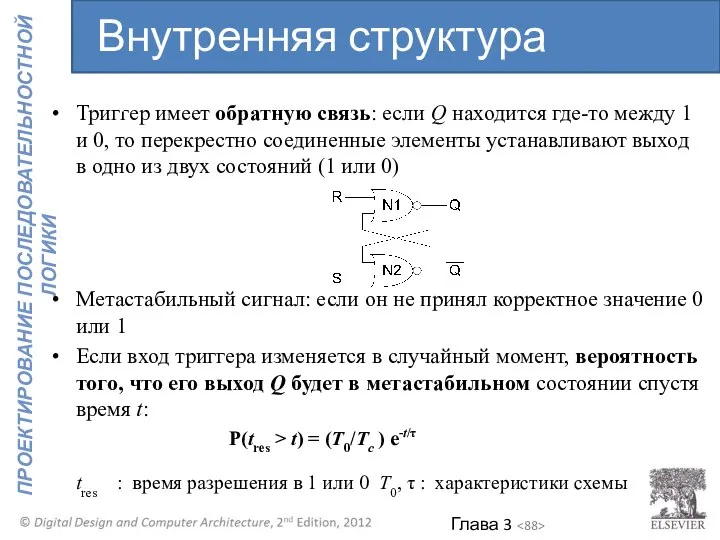
- 87. Бистабильные приборы: два стабильные состояния и метастабильное состояние между ними Триггер два стабильные состояния (0 и
- 88. Триггер имеет обратную связь: если Q находится где-то между 1 и 0, то перекрестно соединенные элементы
- 89. Интуитивно: T0/Tc: вероятность изменения входа в плохое (апертурное) время P(tres > t) = (T0/Tc ) e-t/τ
- 90. Наличие асинхронных входов неизбежно (интерфейс пользователя, системы с разными тактовыми сигналами и т.д.) Функция синхронизатора: сделать
- 91. Синхронизатор: строится из двух последовательно соединенных триггеров Предположим, что D изменяется во время фиксации F1 У
- 92. Вероятность сбоя для одиночного изменения входа: P(failure) = (T0/Tc ) e-(Tc - tsetup)/τ Вероятность сбоя синхронизатора
- 93. Если асинхронный вход изменяется один раз за секунду, то вероятность сбоя за одну секунду будет равна
- 94. Предположим: Tc = 1/500 МГц = 2 нс τ = 200 пс T0 = 150 пс
- 95. Предположим: Tc = 1/500 МГц = 2 нс τ = 200 пс T0 = 150 пс
- 96. Два типа параллелизма: Пространственный параллелизм: несколько копий аппаратных блоков в одно и то же время выполняют
- 97. Токен (Token): Набор входной информации, который обрабатывается для того, чтобы получить выходную информацию Латентность (latency): Время
- 98. Бен готовит печенье для вечеринки, посвященной введению в эксплуатацию его контроллера светофора 5 минут уходит на
- 99. Бен готовит печенье для вечеринки, посвященной введению в эксплуатацию его контроллера светофора 5 минут уходит на
- 100. Чему равна пропускная способность и задержка если Бен использует параллелизма? Пространственный параллелизм: Бен просит Алису помочь,
- 101. Латентность = ? Пропускная способность = ? Пространственный параллелизм:
- 102. Латентность = 5 + 15 = 20 минут = 1/3 час Пропускная способность = 2 противня/
- 103. Латентность = ? Пропускная способность = ? Временной параллелизм
- 105. Скачать презентацию
Цифровая схемотехника и архитектура компьютера
Эти слайды предназначены для преподавателей, которые читают
Цифровая схемотехника и архитектура компьютера
Эти слайды предназначены для преподавателей, которые читают
Благодарности
Перевод данных слайдов на русский язык был выполнен командой сотрудников университетов
Благодарности
Перевод данных слайдов на русский язык был выполнен командой сотрудников университетов
Глава 3 :: Темы
Введение
Защелки и Триггеры
Проектирование синхронных логических схем
Конечные автоматы
Синхронизация последовательностных
Глава 3 :: Темы
Введение
Защелки и Триггеры
Проектирование синхронных логических схем
Конечные автоматы
Синхронизация последовательностных
Выходы последовательностной схемы зависят как от текущих, так и от прошлых
Выходы последовательностной схемы зависят как от текущих, так и от прошлых

Выдают последовательность событий
Имеют (краткосрочную) память
Для сохранения информации используют обратную связь
Выдают последовательность событий
Имеют (краткосрочную) память
Для сохранения информации используют обратную связь
Состояние схемы влияет на ее будущее поведение
Элементы хранят состояние схемы
Бистабильная схема
RS-триггер
D-защелка
D-триггер
Элементы,
Состояние схемы влияет на ее будущее поведение
Элементы хранят состояние схемы
Бистабильная схема
RS-триггер
D-защелка
D-триггер
Элементы,
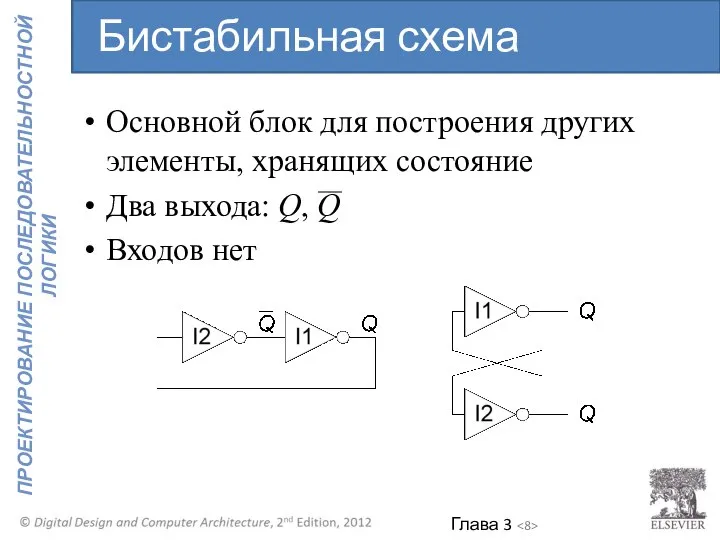
Основной блок для построения других элементы, хранящих состояние
Два выхода: Q, Q
Входов
Основной блок для построения других элементы, хранящих состояние
Два выхода: Q, Q
Входов

Рассмотрим два возможных случая:
Q = 0:
Тогда Q = 1,
Рассмотрим два возможных случая:
Q = 0:
Тогда Q = 1,

RS-триггер
Рассмотрим четыре возможные случая:
S = 1, R = 0
S = 0,
RS-триггер
Рассмотрим четыре возможные случая:
S = 1, R = 0
S = 0,
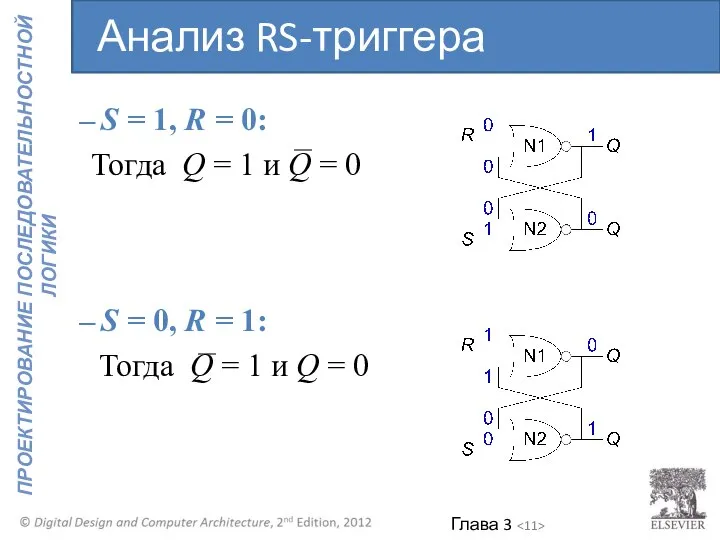
S = 1, R = 0:
Тогда Q = 1
S = 1, R = 0:
Тогда Q = 1

S = 0, R = 0:
Тогда Q = Qprev
S
S = 0, R = 0:
Тогда Q = Qprev
S

S = 0, R = 0:
Тогда Q = Qprev
Память!
S
S = 0, R = 0:
Тогда Q = Qprev
Память!
S
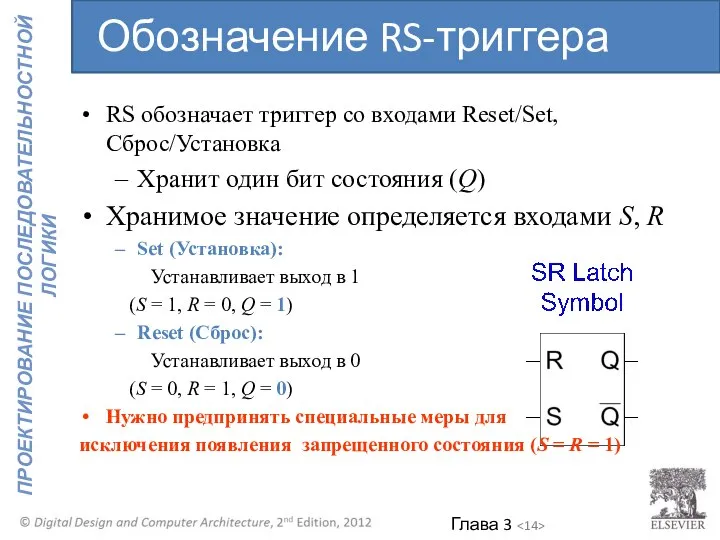
RS обозначает триггер со входами Reset/Set, Сброс/Установка
Хранит один бит состояния
RS обозначает триггер со входами Reset/Set, Сброс/Установка
Хранит один бит состояния

Два входа CLK, D
CLK: определяет когда выход изменяется
D (вход данных): определяет
Два входа CLK, D
CLK: определяет когда выход изменяется
D (вход данных): определяет

Внутренняя структура D защелки
Внутренняя структура D защелки

Внутренняя структура D защелки
Внутренняя структура D защелки

Входы: CLK, D
Работа
Фиксирует значение D по переднему фронту CLK
Когда CLK изменяется
Входы: CLK, D
Работа
Фиксирует значение D по переднему фронту CLK
Когда CLK изменяется

Две последовательно соединенные защелки (L1 и L2), которые управляются комплементарными тактовыми
Две последовательно соединенные защелки (L1 и L2), которые управляются комплементарными тактовыми

Сравнение D-защелки и D-триггера
Сравнение D-защелки и D-триггера

Сравнение D-защелки и D-триггера
Сравнение D-защелки и D-триггера

Регистры
Регистры
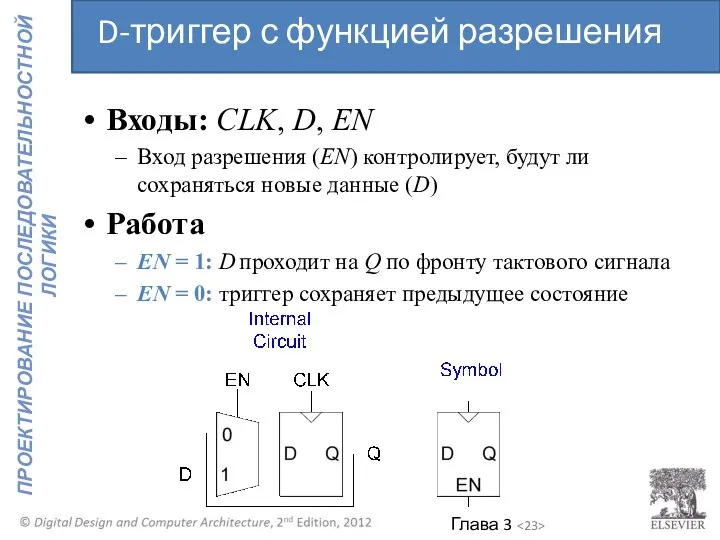
Входы: CLK, D, EN
Вход разрешения (EN) контролирует, будут ли сохраняться новые
Входы: CLK, D, EN
Вход разрешения (EN) контролирует, будут ли сохраняться новые
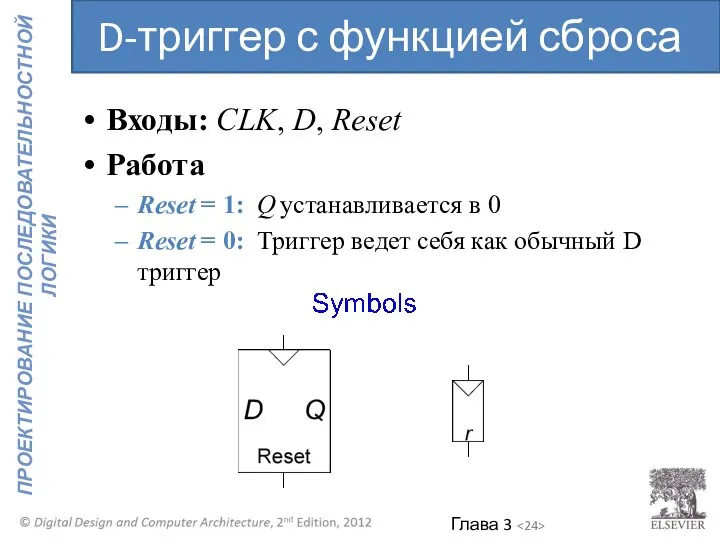
Входы: CLK, D, Reset
Работа
Reset = 1: Q устанавливается в 0
Reset
Входы: CLK, D, Reset
Работа
Reset = 1: Q устанавливается в 0
Reset

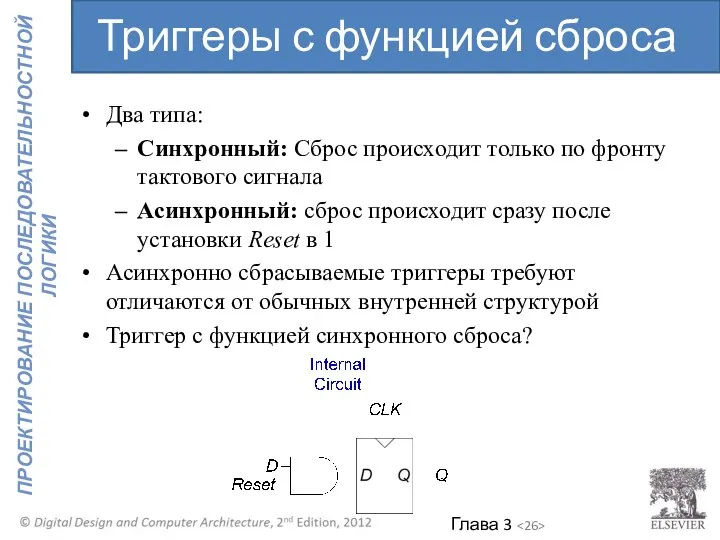
Два типа:
Синхронный: Сброс происходит только по фронту тактового сигнала
Асинхронный: сброс происходит
Два типа:
Синхронный: Сброс происходит только по фронту тактового сигнала
Асинхронный: сброс происходит
Два типа:
Синхронный: Сброс происходит только по фронту тактового сигнала
Асинхронный: сброс происходит
Два типа:
Синхронный: Сброс происходит только по фронту тактового сигнала
Асинхронный: сброс происходит
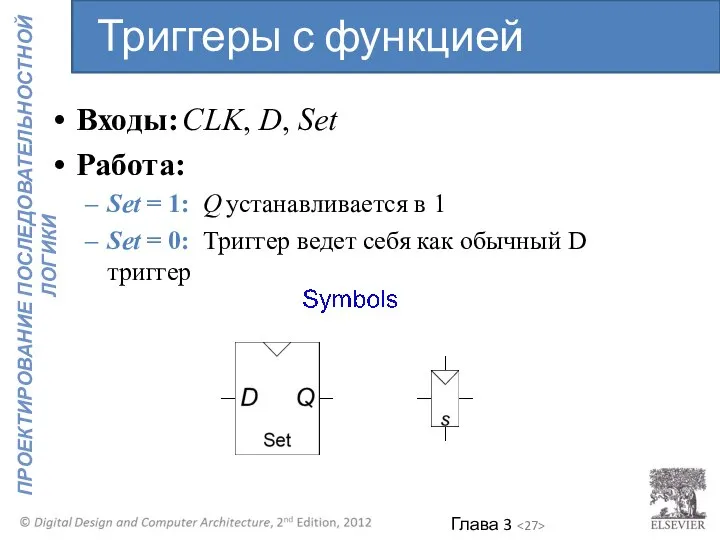
Входы: CLK, D, Set
Работа:
Set = 1: Q устанавливается в 1
Set
Входы: CLK, D, Set
Работа:
Set = 1: Q устанавливается в 1
Set

Последовательностные схемы - все схемы, которые не являются комбинационными
Проблемная схема:
Последовательностные цифровые
Последовательностные схемы - все схемы, которые не являются комбинационными
Проблемная схема:
Последовательностные цифровые

Последовательностные схемы - все схемы, которые не являются комбинационными
Проблемная схема:
Входов нет,
Последовательностные схемы - все схемы, которые не являются комбинационными
Проблемная схема:
Входов нет,
Разрушение циклических путей с путем добавления регистров
Регистры сохраняет состояние схемы
Состояние изменяется
Разрушение циклических путей с путем добавления регистров
Регистры сохраняет состояние схемы
Состояние изменяется
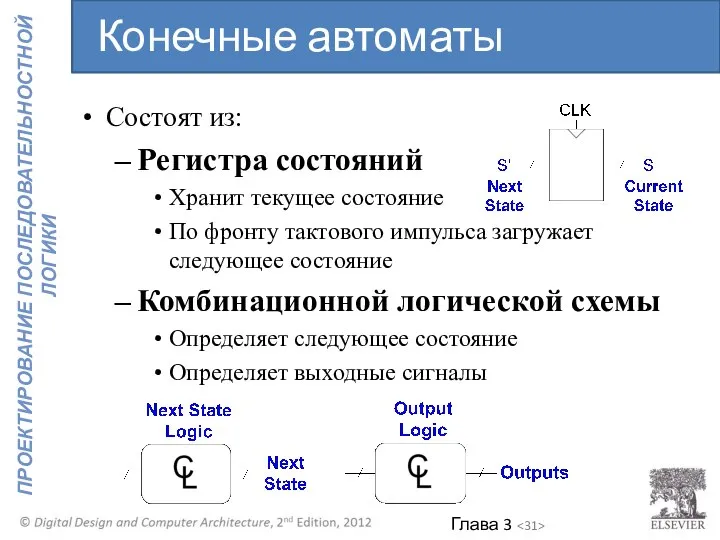
Состоят из:
Регистра состояний
Хранит текущее состояние
По фронту тактового импульса загружает следующее
Состоят из:
Регистра состояний
Хранит текущее состояние
По фронту тактового импульса загружает следующее

Следующее состояние определяется входами и текущим состоянием
Два класса конечных автоматов отличаются
Следующее состояние определяется входами и текущим состоянием
Два класса конечных автоматов отличаются

Система управления светофором
Датчики движения: TA, TB (ИСТИНА, когда на улице есть
Система управления светофором
Датчики движения: TA, TB (ИСТИНА, когда на улице есть
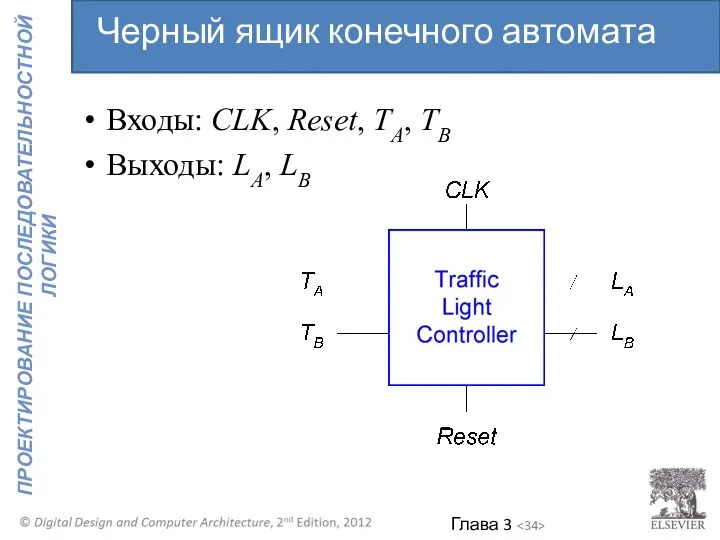
Входы: CLK, Reset, TA, TB
Выходы: LA, LB
Черный ящик конечного автомата
Входы: CLK, Reset, TA, TB
Выходы: LA, LB
Черный ящик конечного автомата

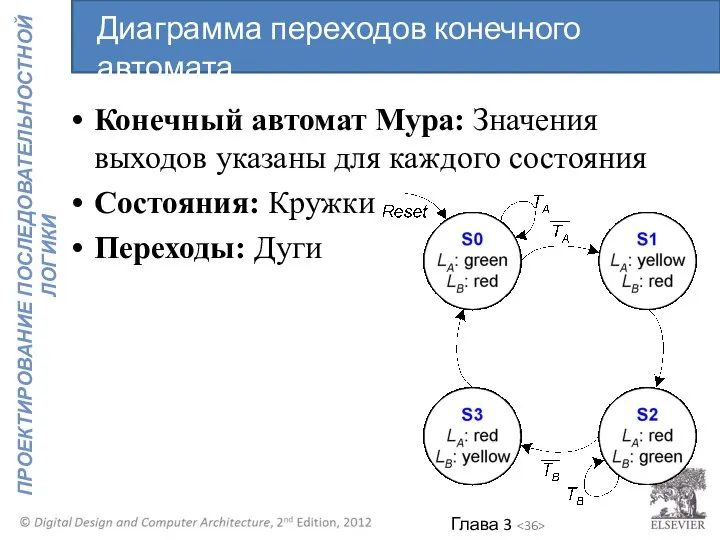
Конечный автомат Мура: Значения выходов указаны для каждого состояния
Состояния: Кружки
Переходы: Дуги
Диаграмма
Конечный автомат Мура: Значения выходов указаны для каждого состояния
Состояния: Кружки
Переходы: Дуги
Диаграмма
Конечный автомат Мура: Значения выходов указаны для каждого состояния
Состояния: Кружки
Переходы: Дуги
Диаграмма
Конечный автомат Мура: Значения выходов указаны для каждого состояния
Состояния: Кружки
Переходы: Дуги
Диаграмма

Таблица переходов конечного автомата
Таблица переходов конечного автомата

Таблица переходов конечного автомата
Таблица переходов конечного автомата

Таблица переходов конечного автомата с указанием кодирования
Таблица переходов конечного автомата с указанием кодирования

S'1 = S1 ⊕ S0
S'0 = S1S0TA + S1S0TB
Таблица переходов
S'1 = S1 ⊕ S0
S'0 = S1S0TA + S1S0TB
Таблица переходов

Таблица выходов конечного автомата
Таблица выходов конечного автомата
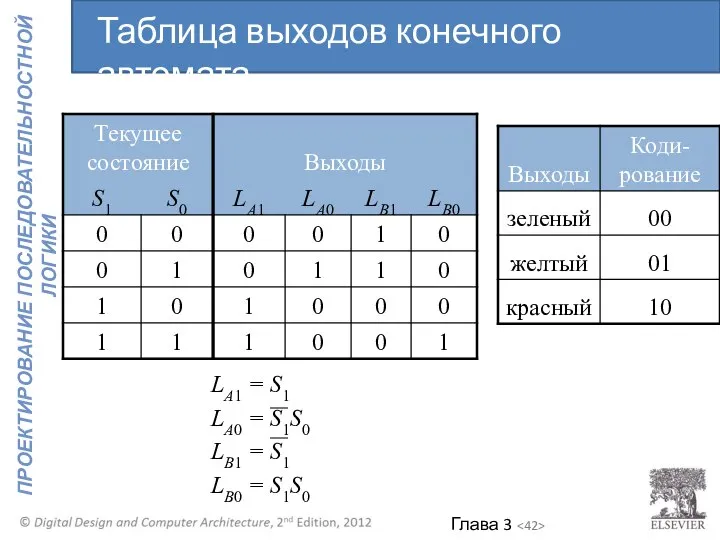
LA1 = S1
LA0 = S1S0
LB1 = S1
LB0 = S1S0
Таблица выходов конечного
LA1 = S1
LA0 = S1S0
LB1 = S1
LB0 = S1S0
Таблица выходов конечного
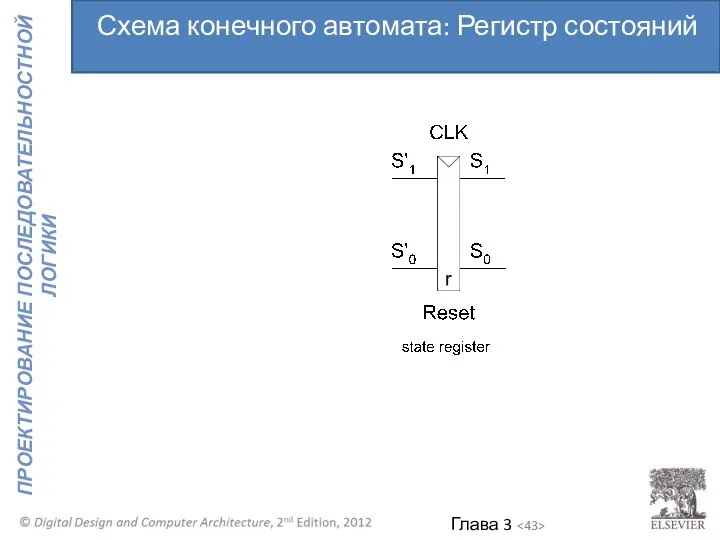
Схема конечного автомата: Регистр состояний
Схема конечного автомата: Регистр состояний
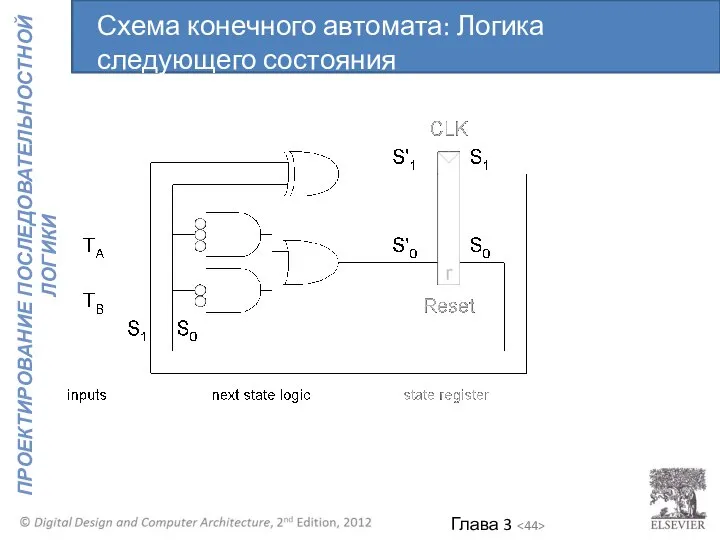
Схема конечного автомата: Логика следующего состояния
Схема конечного автомата: Логика следующего состояния
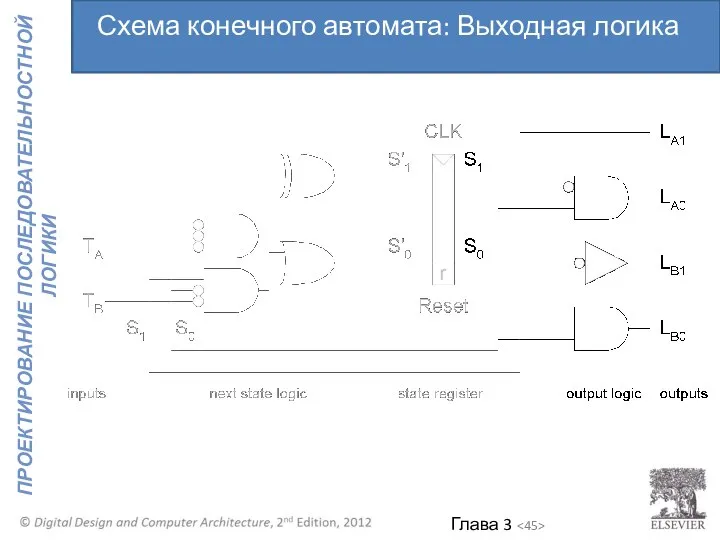
Схема конечного автомата: Выходная логика
Схема конечного автомата: Выходная логика
Временная диаграмма конечного автомата
Временная диаграмма конечного автомата

Двоичное кодирование:
Для четырех состояний: 00, 01, 10, 11
Прямое (One-hot) кодирование
Двоичное кодирование:
Для четырех состояний: 00, 01, 10, 11
Прямое (One-hot) кодирование

У Алисы есть улитка, которая ползает по перфоленте, содержащей последовательность нулей
У Алисы есть улитка, которая ползает по перфоленте, содержащей последовательность нулей

Конечный автомат Мили: около дуг указаны значения
входов/выходов
Диаграмма переходов
Конечный автомат Мили: около дуг указаны значения
входов/выходов
Диаграмма переходов

Таблица переходов конечного автомата Мура
Таблица переходов конечного автомата Мура

Таблица переходов конечного автомата Мура
S1’ = S0A
S0’ = A
Таблица переходов конечного автомата Мура
S1’ = S0A
S0’ = A

Y = S1
Таблица выходов конечного автомата Мура
Y = S1
Таблица выходов конечного автомата Мура
Y = S1
Таблица выходов конечного автомата Мура
Y = S1
Таблица выходов конечного автомата Мура

Таблица переходов и выходов конечного автомата Мили
Таблица переходов и выходов конечного автомата Мили
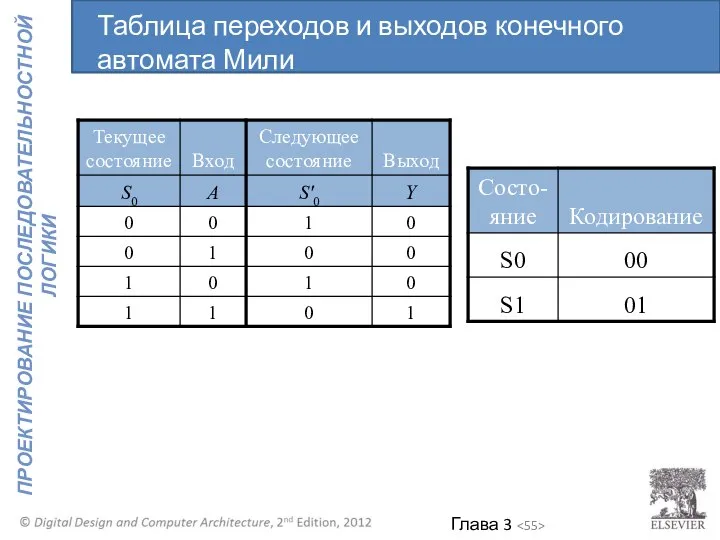
Таблица переходов и выходов конечного автомата Мили
Таблица переходов и выходов конечного автомата Мили

Схема конечного автомата Мура
Схема конечного автомата Мура

Схема конечного автомата Мили
Схема конечного автомата Мили
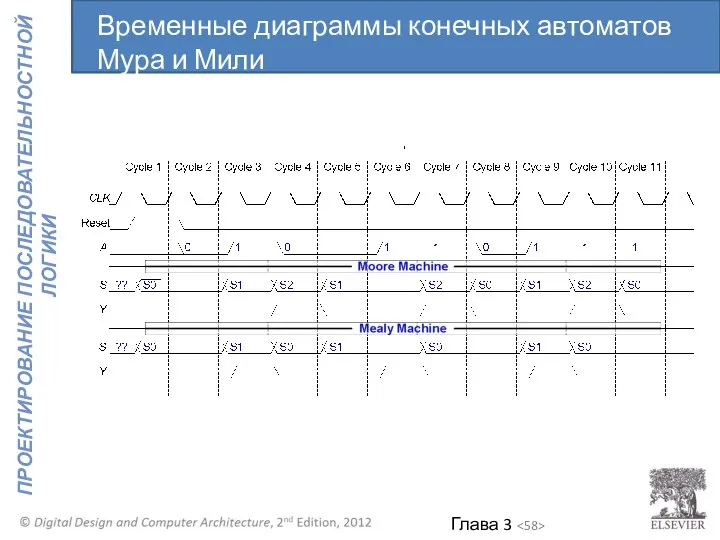
Временные диаграммы конечных автоматов Мура и Мили
Временные диаграммы конечных автоматов Мура и Мили
Разделение сложного конечного автомата на более простые взаимодействующие конечный автоматы
Пример: Модифицируйте
Разделение сложного конечного автомата на более простые взаимодействующие конечный автоматы
Пример: Модифицируйте

Немодульный
конечный автомат
Модульный
конечный автомат
Модифицированный конечный автомат
Немодульный
конечный автомат
Модульный
конечный автомат
Модифицированный конечный автомат
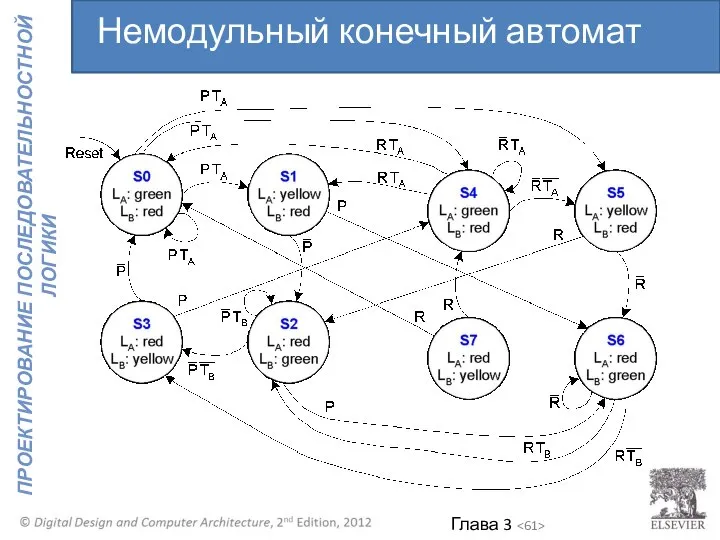
Немодульный конечный автомат
Немодульный конечный автомат

Модульный конечный автомат
Модульный конечный автомат
Определите входы и выходы
Нарисуйте диаграмму переходов
Запишите таблицу переходов
Выберите способ кодирования состояний
Для
Определите входы и выходы
Нарисуйте диаграмму переходов
Запишите таблицу переходов
Выберите способ кодирования состояний
Для
Триггер фиксирует сигнал D по фронту тактового сигнала
Сигнал D должен быть
Триггер фиксирует сигнал D по фронту тактового сигнала
Сигнал D должен быть

Время предустановки: tsetup = период времени перед фронтом тактового сигнала, в
Время предустановки: tsetup = период времени перед фронтом тактового сигнала, в
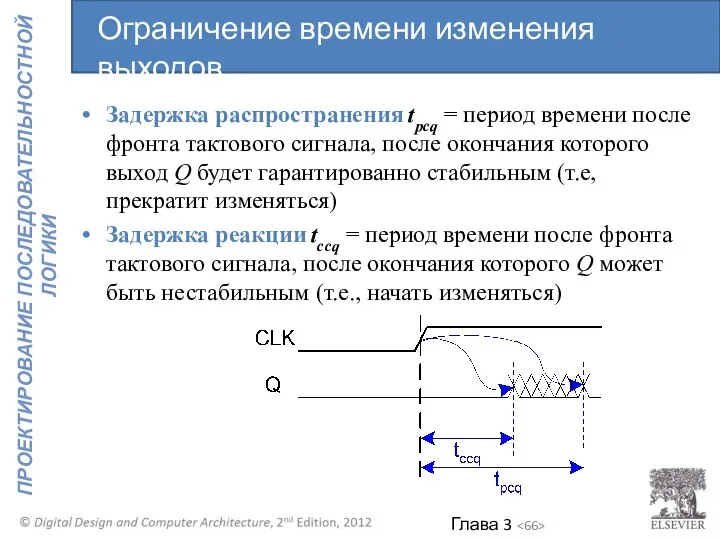
Задержка распространения tpcq = период времени после фронта тактового сигнала, после
Задержка распространения tpcq = период времени после фронта тактового сигнала, после
Входы синхронной последовательностной схемы должны быть стабильны в течение апертурного времени
Входы синхронной последовательностной схемы должны быть стабильны в течение апертурного времени

В зависимости от задержек элементов, общая задержка между регистрами лежит между
В зависимости от задержек элементов, общая задержка между регистрами лежит между
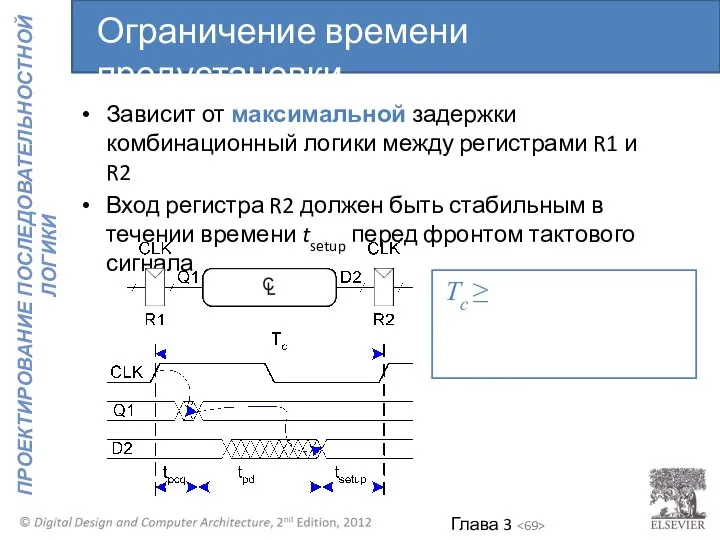
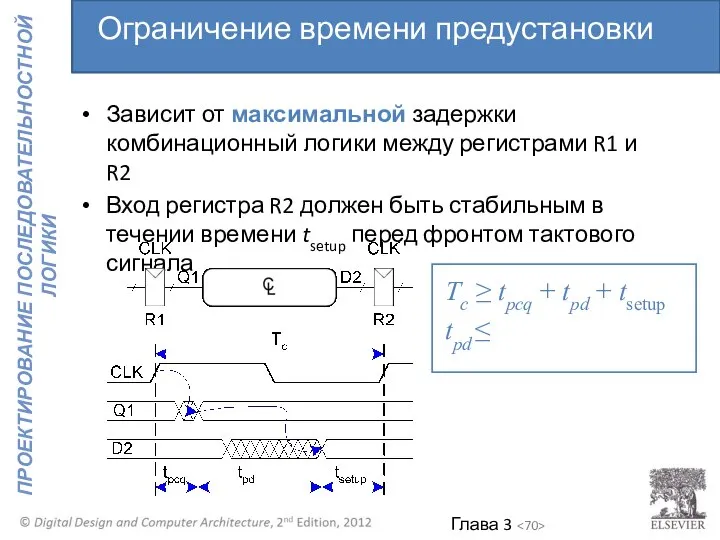
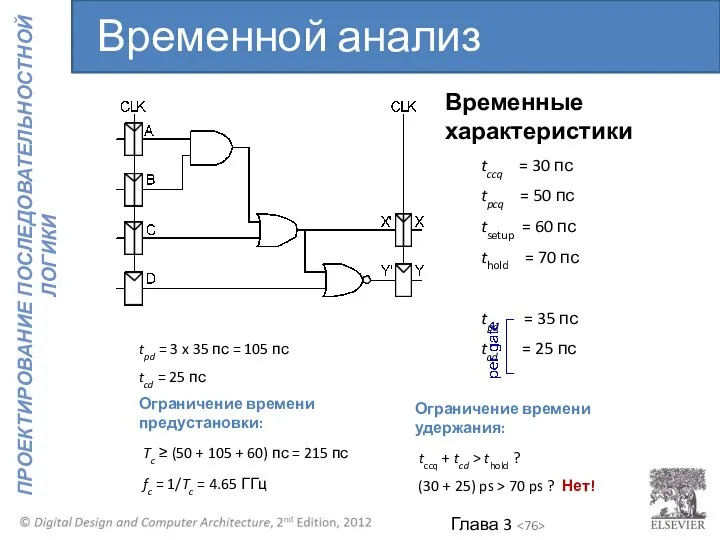
Зависит от максимальной задержки комбинационный логики между регистрами R1 и R2
Вход
Зависит от максимальной задержки комбинационный логики между регистрами R1 и R2
Вход
Зависит от максимальной задержки комбинационный логики между регистрами R1 и R2
Вход
Зависит от максимальной задержки комбинационный логики между регистрами R1 и R2
Вход
Зависит от максимальной задержки комбинационный логики между регистрами R1 и R2
Вход
Зависит от максимальной задержки комбинационный логики между регистрами R1 и R2
Вход
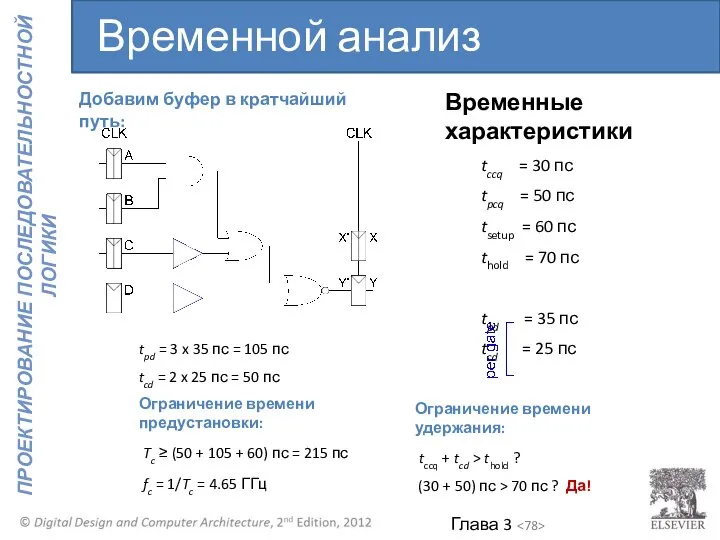
Зависит от минимальной задержки комбинационный логики между регистрами R1 и R2
Вход
Зависит от минимальной задержки комбинационный логики между регистрами R1 и R2
Вход

Зависит от минимальной задержки комбинационный логики между регистрами R1 и R2
Вход
Зависит от минимальной задержки комбинационный логики между регистрами R1 и R2
Вход
Зависит от минимальной задержки комбинационный логики между регистрами R1 и R2
Вход
Зависит от минимальной задержки комбинационный логики между регистрами R1 и R2
Вход
Временные характеристики
tccq = 30 пс
tpcq = 50 пс
tsetup = 60 пс
thold
Временные характеристики
tccq = 30 пс
tpcq = 50 пс
tsetup = 60 пс
thold
Временные характеристики
tccq = 30 пс
tpcq = 50 пс
tsetup = 60 пс
thold
Временные характеристики
tccq = 30 пс
tpcq = 50 пс
tsetup = 60 пс
thold

Временные характеристики
tccq = 30 пс
tpcq = 50 пс
tsetup = 60 пс
thold
Временные характеристики
tccq = 30 пс
tpcq = 50 пс
tsetup = 60 пс
thold
Временные характеристики
tccq = 30 пс
tpcq = 50 пс
tsetup = 60 пс
thold
Временные характеристики
tccq = 30 пс
tpcq = 50 пс
tsetup = 60 пс
thold
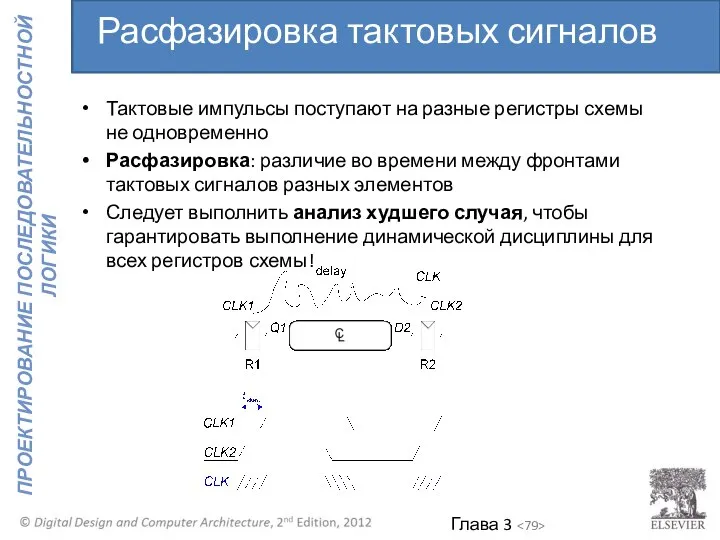
Тактовые импульсы поступают на разные регистры схемы не одновременно
Расфазировка: различие во
Тактовые импульсы поступают на разные регистры схемы не одновременно
Расфазировка: различие во
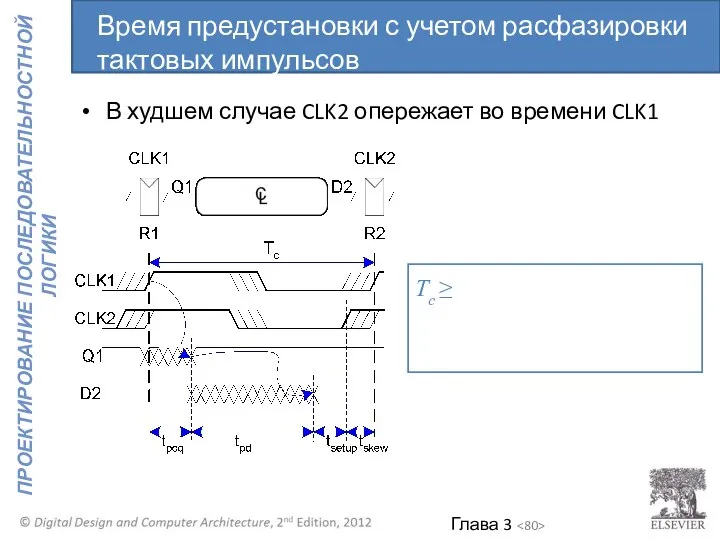
В худшем случае CLK2 опережает во времени CLK1
Tc ≥
Время предустановки с
В худшем случае CLK2 опережает во времени CLK1
Tc ≥
Время предустановки с
В худшем случае CLK2 опережает во времени CLK1
Tc ≥ tpcq +
В худшем случае CLK2 опережает во времени CLK1
Tc ≥ tpcq +

В худшем случае CLK2 опережает во времени CLK1
Tc ≥ tpcq +
В худшем случае CLK2 опережает во времени CLK1
Tc ≥ tpcq +

В худшем случае CLK2 отстает во времени от CLK1
tccq + tcd
В худшем случае CLK2 отстает во времени от CLK1
tccq + tcd
В худшем случае CLK2 отстает во времени от CLK1
tccq + tcd
В худшем случае CLK2 отстает во времени от CLK1
tccq + tcd
В худшем случае CLK2 отстает во времени от CLK1
tccq + tcd
В худшем случае CLK2 отстает во времени от CLK1
tccq + tcd
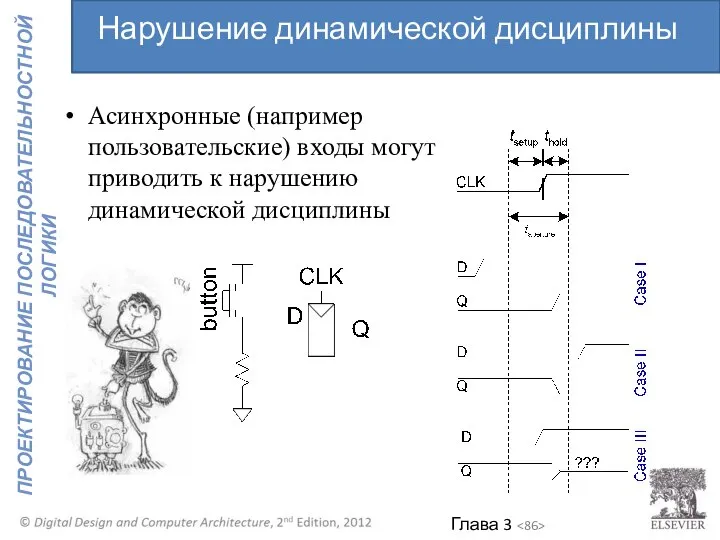
Асинхронные (например пользовательские) входы могут приводить к нарушению динамической дисциплины
Нарушение динамической
Асинхронные (например пользовательские) входы могут приводить к нарушению динамической дисциплины
Нарушение динамической

Бистабильные приборы: два стабильные состояния и метастабильное состояние между ними
Триггер два
Бистабильные приборы: два стабильные состояния и метастабильное состояние между ними
Триггер два
Триггер имеет обратную связь: если Q находится где-то между 1 и
Триггер имеет обратную связь: если Q находится где-то между 1 и

Интуитивно:
T0/Tc: вероятность изменения входа в плохое (апертурное) время
P(tres > t)
Интуитивно:
T0/Tc: вероятность изменения входа в плохое (апертурное) время
P(tres > t)
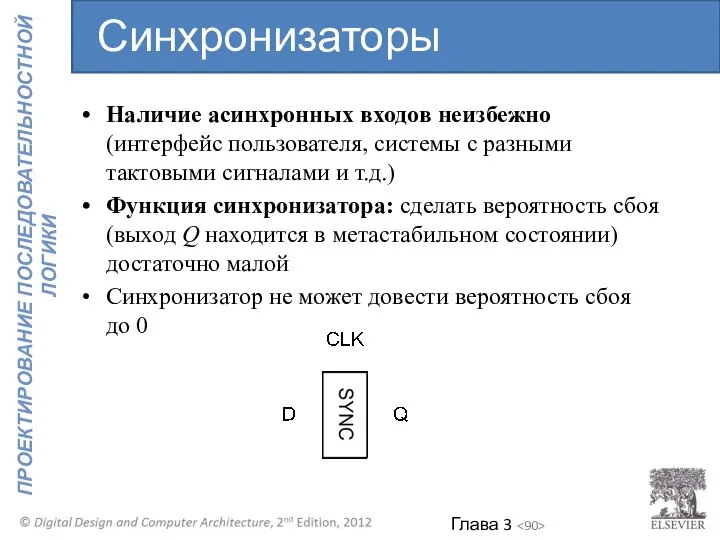
Наличие асинхронных входов неизбежно (интерфейс пользователя, системы с разными тактовыми сигналами
Наличие асинхронных входов неизбежно (интерфейс пользователя, системы с разными тактовыми сигналами
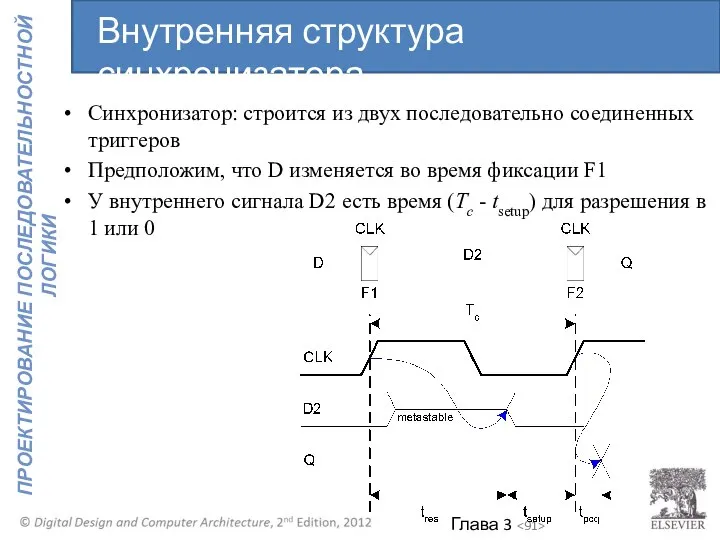
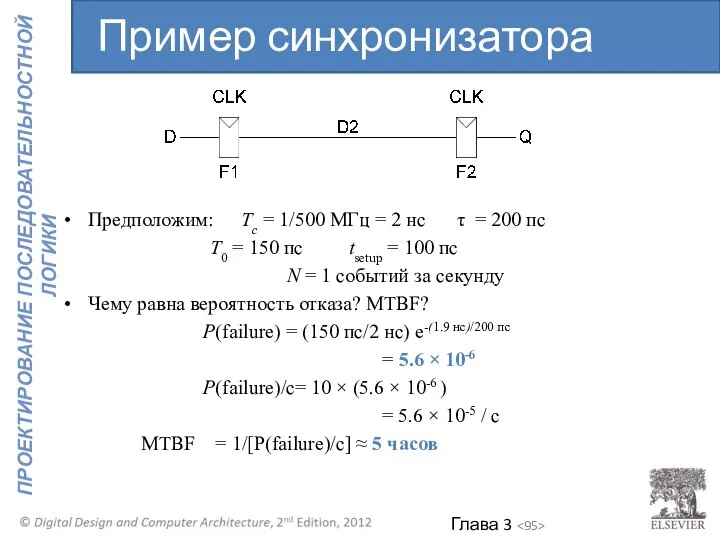
Синхронизатор: строится из двух последовательно соединенных триггеров
Предположим, что D изменяется во
Синхронизатор: строится из двух последовательно соединенных триггеров
Предположим, что D изменяется во
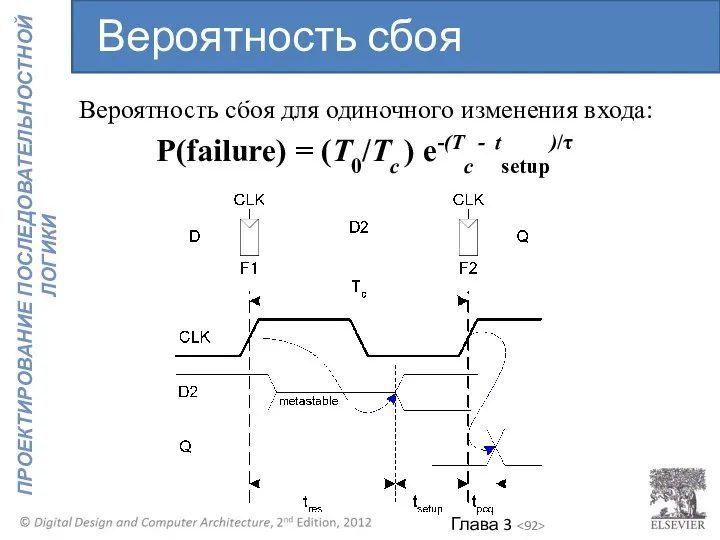
Вероятность сбоя для одиночного изменения входа:
P(failure) = (T0/Tc ) e-(Tc
Вероятность сбоя для одиночного изменения входа:
P(failure) = (T0/Tc ) e-(Tc

Если асинхронный вход изменяется один раз за секунду, то вероятность сбоя
Если асинхронный вход изменяется один раз за секунду, то вероятность сбоя

Предположим: Tc = 1/500 МГц = 2 нс τ = 200 пс
Предположим: Tc = 1/500 МГц = 2 нс τ = 200 пс
Предположим: Tc = 1/500 МГц = 2 нс τ = 200 пс
Предположим: Tc = 1/500 МГц = 2 нс τ = 200 пс
Два типа параллелизма:
Пространственный параллелизм:
несколько копий аппаратных блоков в одно и то
Два типа параллелизма:
Пространственный параллелизм:
несколько копий аппаратных блоков в одно и то
Токен (Token): Набор входной информации, который обрабатывается для того, чтобы получить
Токен (Token): Набор входной информации, который обрабатывается для того, чтобы получить

Бен готовит печенье для вечеринки, посвященной введению в эксплуатацию его контроллера
Бен готовит печенье для вечеринки, посвященной введению в эксплуатацию его контроллера
Бен готовит печенье для вечеринки, посвященной введению в эксплуатацию его контроллера
Бен готовит печенье для вечеринки, посвященной введению в эксплуатацию его контроллера
Чему равна пропускная способность и задержка если Бен использует параллелизма?
Пространственный параллелизм:
Чему равна пропускная способность и задержка если Бен использует параллелизма?
Пространственный параллелизм:

Латентность = ?
Пропускная способность = ?
Пространственный параллелизм:
Латентность = ?
Пропускная способность = ?
Пространственный параллелизм:

Латентность = 5 + 15 = 20 минут = 1/3 час
Латентность = 5 + 15 = 20 минут = 1/3 час

Латентность = ?
Пропускная способность = ?
Временной параллелизм
Латентность = ?
Пропускная способность = ?
Временной параллелизм
 История и правила игры в футбол
История и правила игры в футбол Источники и ресурсы власти
Источники и ресурсы власти Қазақстандық модельерлер миланда
Қазақстандық модельерлер миланда Презентация "Основы восточного мировоззрения в бумагопластике" - скачать презентации по МХК
Презентация "Основы восточного мировоззрения в бумагопластике" - скачать презентации по МХК "Фантазия важнее знаний" А. Эйнштейн
"Фантазия важнее знаний" А. Эйнштейн  Раннее христианство. Гомилетика. Риторика и христианство
Раннее христианство. Гомилетика. Риторика и христианство Особенности регулирования труда женщин и лиц с семейными обязанностями
Особенности регулирования труда женщин и лиц с семейными обязанностями Де козак там і слава
Де козак там і слава Оценка деятельности предприятия на примере ООО «Магистраль»
Оценка деятельности предприятия на примере ООО «Магистраль» Профилактика болезней сердца
Профилактика болезней сердца Презентация на тему "Методика проведения учебного занятия в системе дополнительного образования" - скачать презентации по Пе
Презентация на тему "Методика проведения учебного занятия в системе дополнительного образования" - скачать презентации по Пе Биография Жака Превера
Биография Жака Превера Презентация "Маркетинговая среда" - скачать презентации по Экономике
Презентация "Маркетинговая среда" - скачать презентации по Экономике Ардуино. Микроконтроллер
Ардуино. Микроконтроллер Презентация Концепция долгосрочного социально-экономического развития Российской Федерации на период до 2020 года о таможенной де
Презентация Концепция долгосрочного социально-экономического развития Российской Федерации на период до 2020 года о таможенной де Муниципальное образовательное учреждение Глебовская средняя общеобразовательная школа Из опыта работы учителя русского языка и
Муниципальное образовательное учреждение Глебовская средняя общеобразовательная школа Из опыта работы учителя русского языка и Алгоритмы и формулы аналитической геометрии
Алгоритмы и формулы аналитической геометрии Сортировка массива (pascal)
Сортировка массива (pascal) Адаптация учащихся в предметной учебной деятельности формированием понятийного аппарата, или Как овладеть языком предмета - през
Адаптация учащихся в предметной учебной деятельности формированием понятийного аппарата, или Как овладеть языком предмета - през День инвестора Центральной и Восточной Европы (IDCEE) Интернет-технологии и инновации 25-26 октября, 2011 Киев, Украина
День инвестора Центральной и Восточной Европы (IDCEE) Интернет-технологии и инновации 25-26 октября, 2011 Киев, Украина НАЛОГООБЛОЖЕНИЕ НЕКОММЕРЧЕСКИХ ОРГАНИЗАЦИЙ СМИРНОВА ЕЛЕНА ЕВГЕНЬЕВНА – к.э.н., доцент
НАЛОГООБЛОЖЕНИЕ НЕКОММЕРЧЕСКИХ ОРГАНИЗАЦИЙ СМИРНОВА ЕЛЕНА ЕВГЕНЬЕВНА – к.э.н., доцент Учитель начальных классов: Фогель С.С. МОБУ «Лицей №5» Оренбург- 2012г.
Учитель начальных классов: Фогель С.С. МОБУ «Лицей №5» Оренбург- 2012г. Степень с натуральным показателем - презентация по Алгебре__
Степень с натуральным показателем - презентация по Алгебре__ «Наука побеждать» Автор: Кругляков Александр 3 класс
«Наука побеждать» Автор: Кругляков Александр 3 класс Посреднические договоры
Посреднические договоры Презентация на тему "Аристотель. Педагогические идеи" - скачать презентации по Педагогике
Презентация на тему "Аристотель. Педагогические идеи" - скачать презентации по Педагогике Герои легенд. Игра
Герои легенд. Игра Экономические закономерности Жуйкова Л.Д., преподаватель КГБОУ НПО «Профессиональный лицей № 67»
Экономические закономерности Жуйкова Л.Д., преподаватель КГБОУ НПО «Профессиональный лицей № 67»