- Декартовые базисы программирования движения

Содержание
- 2. Станок с декартовым базисом исполнения движений
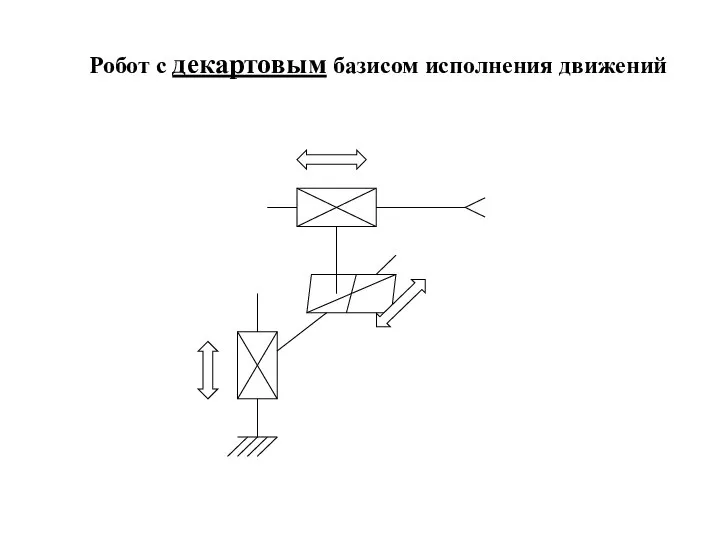
- 3. Робот с декартовым базисом исполнения движений
- 4. Робот с декартовым базисом исполнения движений
- 5. Робот с декартовым базисом исполнения движений
- 6. Рабочая зона манипулятора
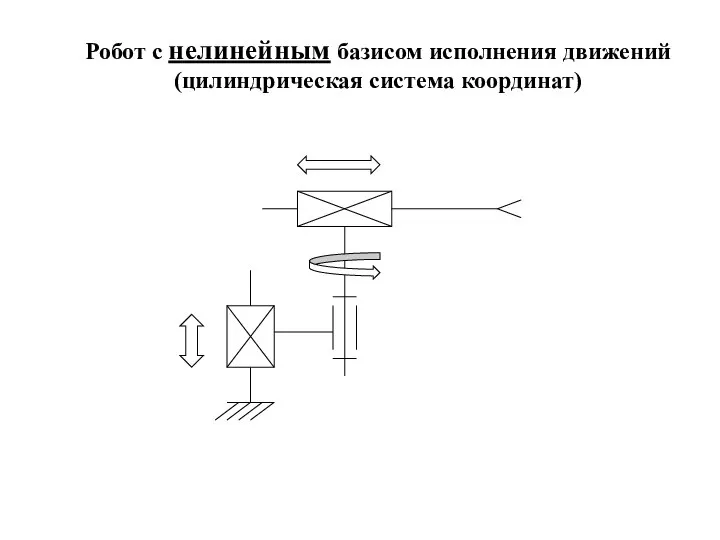
- 7. Робот с нелинейным базисом исполнения движений (цилиндрическая система координат)
- 8. Робот с нелинейным базисом исполнения движений (цилиндрическая система координат)
- 9. Робот с нелинейным базисом исполнения движений (цилиндрическая система координат)
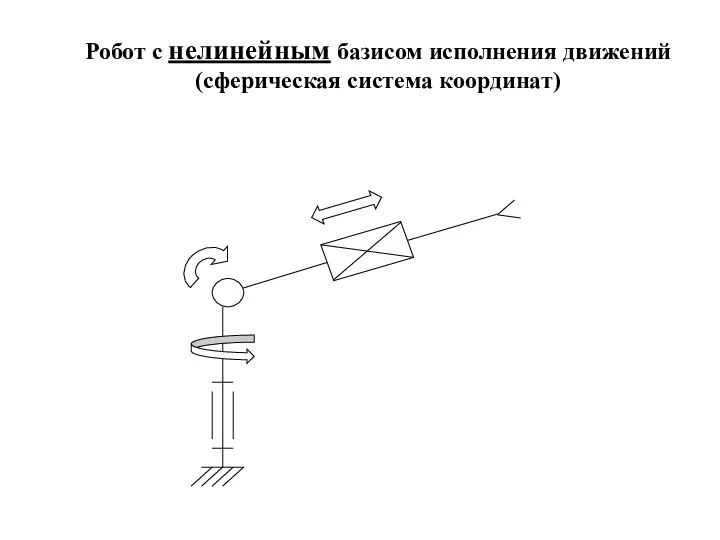
- 10. Робот с нелинейным базисом исполнения движений (сферическая система координат)
- 11. Робот с нелинейным базисом исполнения движений (сферическая система координат)
- 12. Робот с нелинейным базисом исполнения движений (ангулярная система координат типа SCARA)
- 13. Сечение рабочей зоны для двухзвенного манипулятора типа SCARA ( L1= L2 )
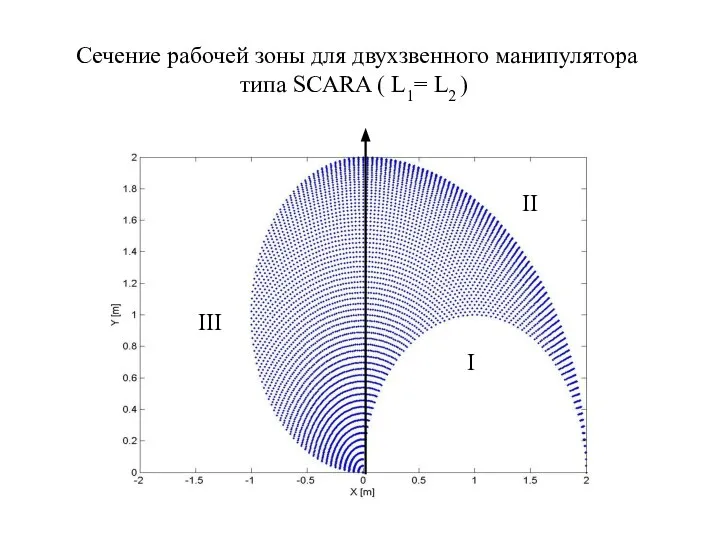
- 14. Сечение рабочей зоны для двухзвенного манипулятора типа SCARA ( L1= L2 ) III I II
- 15. Границы рабочей зоны Граница1: вытянутый манипулятор, поворот звена 2, звено 1 неподвижно Граница2: вытянутый манипулятор, поворот
- 16. Сечение рабочей зоны для двухзвенного манипулятора типа SCARA (L1= 2L2 ).
- 17. Робот с нелинейным базисом исполнения движений (ангулярная система координат типа SCARA)
- 18. Робот с нелинейным базисом исполнения движений (ангулярная система координат типа SCARA)
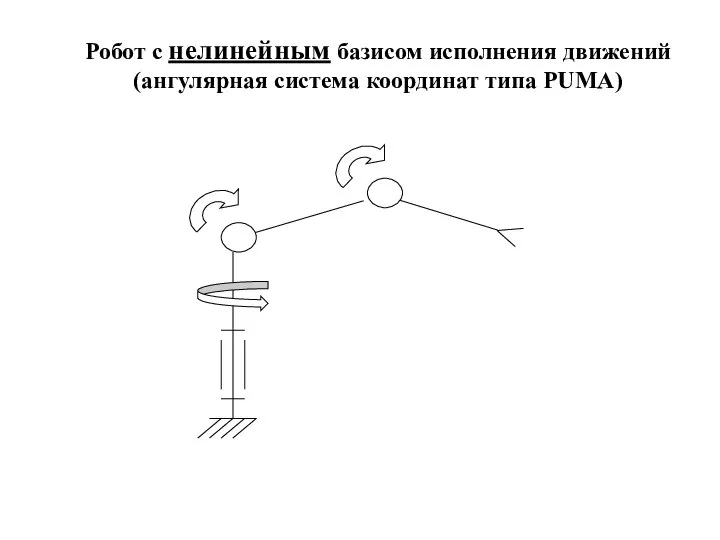
- 19. Робот с нелинейным базисом исполнения движений (ангулярная система координат типа PUMA)
- 20. Робот с нелинейным базисом исполнения движений (ангулярная система координат типа PUMA)
- 21. Pentapod - Structure Highly dynamic precision with 5 rotary direct drives Minimized virbrations due to low
- 22. Машины с параллельной структурой Первый отечественный гексапод (Новосибирск, 1984)
- 23. Технологический комплекс «HexaBend» (Институт станков и прессов IWU, Кемниц, Германия)
- 24. Машины с гибридной структурой Технологический комплекс «Dynapod» (Институт станков и прессов IWU, Кемниц, Германия)
- 25. Цикловое управление Исходное положение P0 Pm Целевое положение Движения всех звеньев робота происходит из начального в
- 26. Позиционное управление Исходное положение P0 Pm Целевое положение Промежуточные точки P1 P2 P3 Движения всех звеньев
- 27. Позиционное управление: роботизированная точечная сварка (COMAU Robot) загрузка технологического оборудования (REIS Robot)
- 28. Контурное управление P0 Pm P0P1P2P3Pm - программная траектория V(t) – контурная скорость P1 P2 P3 V
- 29. Контурное управление : роботизированная окраска (FANUC Robot) лазерная резка (REIS Robot)
- 30. Адаптивное управление: Робототехнологический комплекс (МГТУ Станкин - Будапештский ТУ) 1 – манипулятор PUMA-560, 2 – устройство
- 31. Адаптивное управление (на основе информации о возмущающем воздействии)
- 32. Конструкция силомоментного датчика С.А.Воротников Информационные устройства робототехнических систем, Изд-во МГТУ им. Баумана, 2005
- 33. Основные части нервной клетки (нейрона)
- 34. Структура нейронной сети ANNs are taught by system developer at concrete cases. While teaching the developer
- 35. Обучение нейронной сети
- 36. Применение нейронной сети
- 37. Кинематические задачи в робототехнике и мехатронике - Прямая задача о положении многозвенного механизма - Обратная задача
- 38. q1= r q2 P x y Пример
- 39. Прямая задача о положении многозвенного механизма Постановка задачи: Определить вектор положения концевой точки (рабочего органа) в
- 40. Пример
- 41. Обратная задача о положении многозвенного механизма Постановка задачи: Определить обобщенные координаты многозвенного механизма по заданному вектору
- 42. Пример
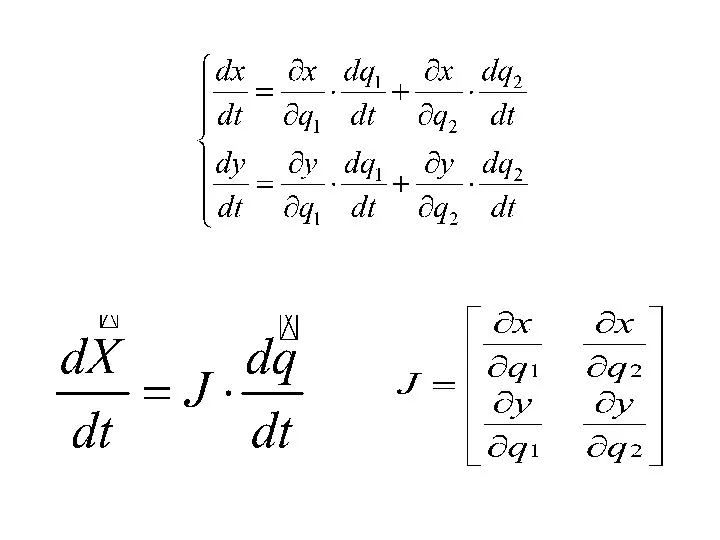
- 43. Прямая задача о скорости многозвенного механизма Постановка задачи: Определить вектор скорости концевой точки (рабочего органа) по
- 44. Прямая задача о скорости многозвенного механизма z y x P V Ω
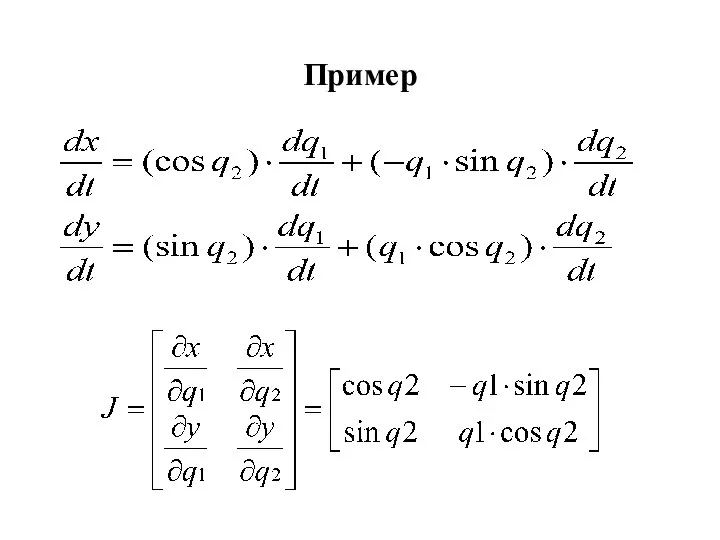
- 46. Пример
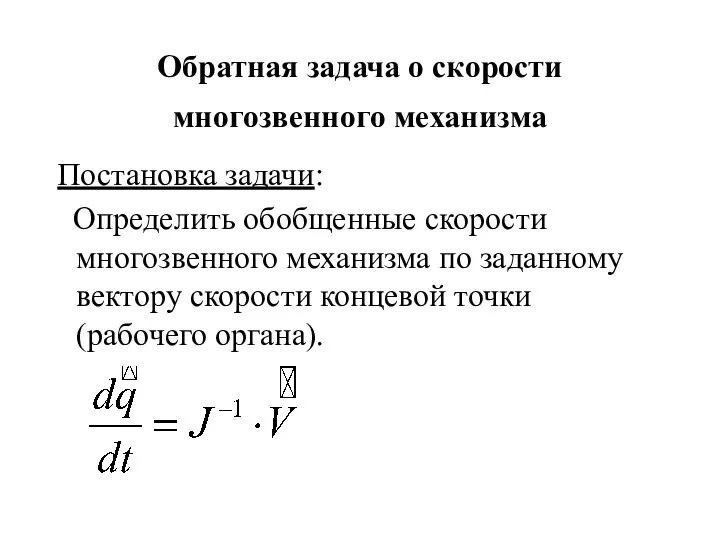
- 47. Обратная задача о скорости многозвенного механизма Постановка задачи: Определить обобщенные скорости многозвенного механизма по заданному вектору
- 49. Скачать презентацию
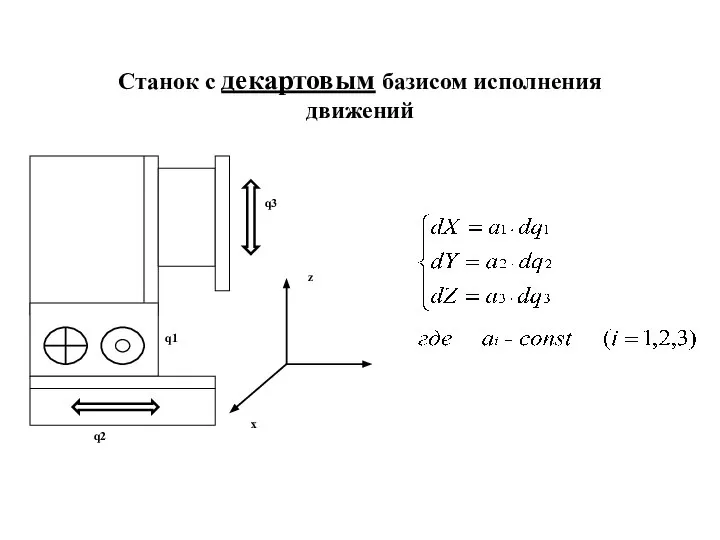
Станок с декартовым базисом исполнения движений
Станок с декартовым базисом исполнения движений

Робот с декартовым базисом исполнения движений
Робот с декартовым базисом исполнения движений
Робот с декартовым базисом исполнения движений
Робот с декартовым базисом исполнения движений

Робот с декартовым базисом исполнения движений
Робот с декартовым базисом исполнения движений
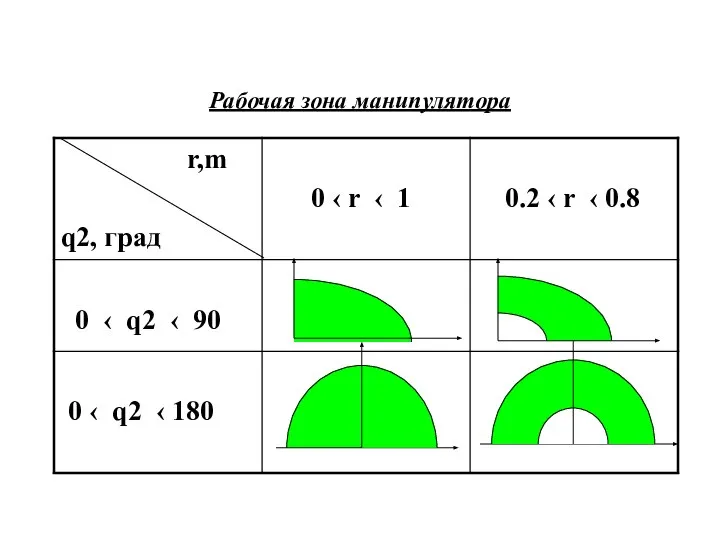
Рабочая зона манипулятора
Рабочая зона манипулятора

Робот с нелинейным базисом исполнения движений
(цилиндрическая система координат)
Робот с нелинейным базисом исполнения движений
(цилиндрическая система координат)
Робот с нелинейным базисом исполнения движений
(цилиндрическая система координат)
Робот с нелинейным базисом исполнения движений
(цилиндрическая система координат)

Робот с нелинейным базисом исполнения движений
(цилиндрическая система координат)
Робот с нелинейным базисом исполнения движений
(цилиндрическая система координат)

Робот с нелинейным базисом исполнения движений
(сферическая система координат)
Робот с нелинейным базисом исполнения движений
(сферическая система координат)
Робот с нелинейным базисом исполнения движений
(сферическая система координат)
Робот с нелинейным базисом исполнения движений
(сферическая система координат)

Робот с нелинейным базисом исполнения движений
(ангулярная система координат типа SCARA)
Робот с нелинейным базисом исполнения движений
(ангулярная система координат типа SCARA)
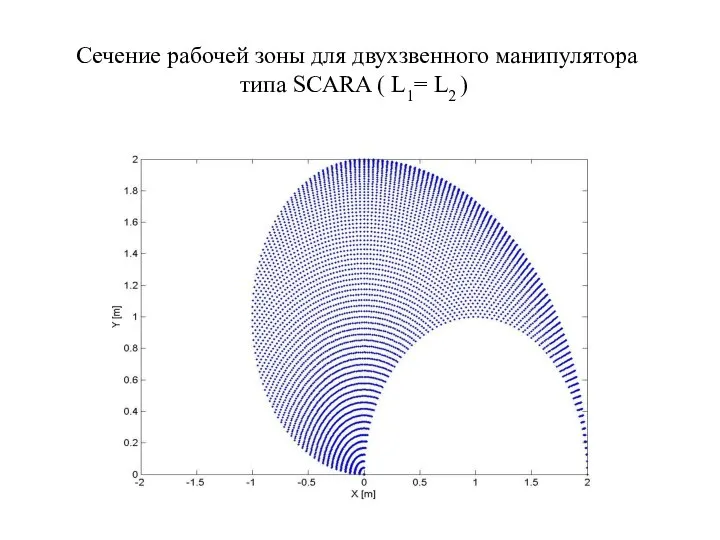
Сечение рабочей зоны для двухзвенного манипулятора типа SCARA ( L1=
Сечение рабочей зоны для двухзвенного манипулятора типа SCARA ( L1=
Сечение рабочей зоны для двухзвенного манипулятора типа SCARA ( L1=
Сечение рабочей зоны для двухзвенного манипулятора типа SCARA ( L1=
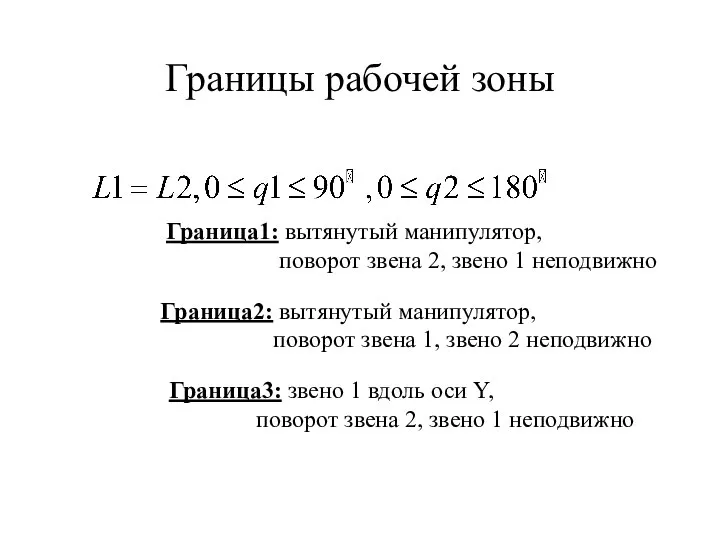
Границы рабочей зоны
Граница1: вытянутый манипулятор,
поворот звена 2, звено 1
Границы рабочей зоны
Граница1: вытянутый манипулятор,
поворот звена 2, звено 1
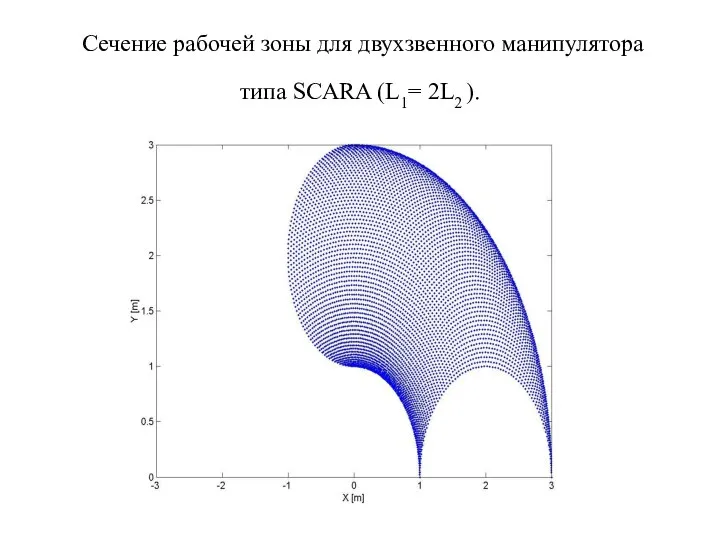
Сечение рабочей зоны для двухзвенного манипулятора типа SCARA (L1= 2L2
Сечение рабочей зоны для двухзвенного манипулятора типа SCARA (L1= 2L2

Робот с нелинейным базисом исполнения движений
(ангулярная система координат типа SCARA)
Робот с нелинейным базисом исполнения движений
(ангулярная система координат типа SCARA)

Робот с нелинейным базисом исполнения движений
(ангулярная система координат типа SCARA)
Робот с нелинейным базисом исполнения движений
(ангулярная система координат типа SCARA)
Робот с нелинейным базисом исполнения движений
(ангулярная система координат типа PUMA)
Робот с нелинейным базисом исполнения движений
(ангулярная система координат типа PUMA)

Робот с нелинейным базисом исполнения движений
(ангулярная система координат типа PUMA)
Робот с нелинейным базисом исполнения движений
(ангулярная система координат типа PUMA)
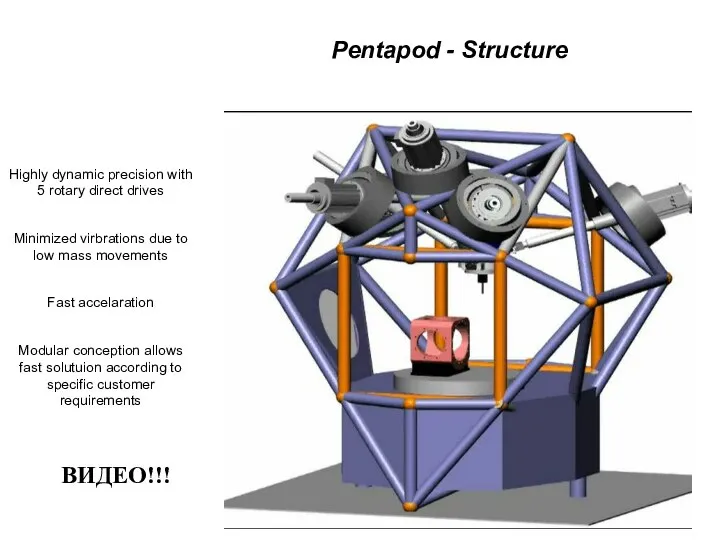
Pentapod - Structure
Highly dynamic precision with 5 rotary direct drives
Minimized virbrations
Pentapod - Structure
Highly dynamic precision with 5 rotary direct drives
Minimized virbrations

Машины с параллельной структурой
Первый отечественный гексапод (Новосибирск, 1984)
Машины с параллельной структурой
Первый отечественный гексапод (Новосибирск, 1984)

Технологический комплекс «HexaBend»
(Институт станков и прессов IWU, Кемниц, Германия)
Технологический комплекс «HexaBend»
(Институт станков и прессов IWU, Кемниц, Германия)

Машины с гибридной структурой
Технологический комплекс «Dynapod»
(Институт станков и прессов IWU,
Машины с гибридной структурой
Технологический комплекс «Dynapod»
(Институт станков и прессов IWU,
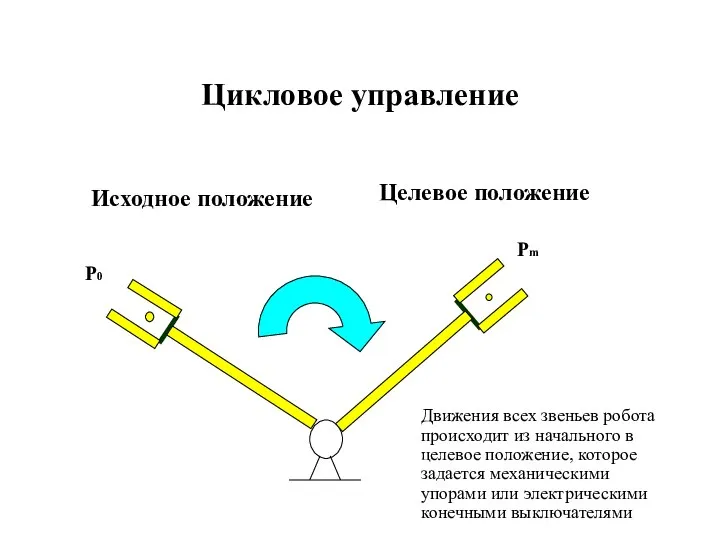
Цикловое управление
Исходное положение
P0
Pm
Целевое положение
Движения всех звеньев робота происходит
Цикловое управление
Исходное положение
P0
Pm
Целевое положение
Движения всех звеньев робота происходит
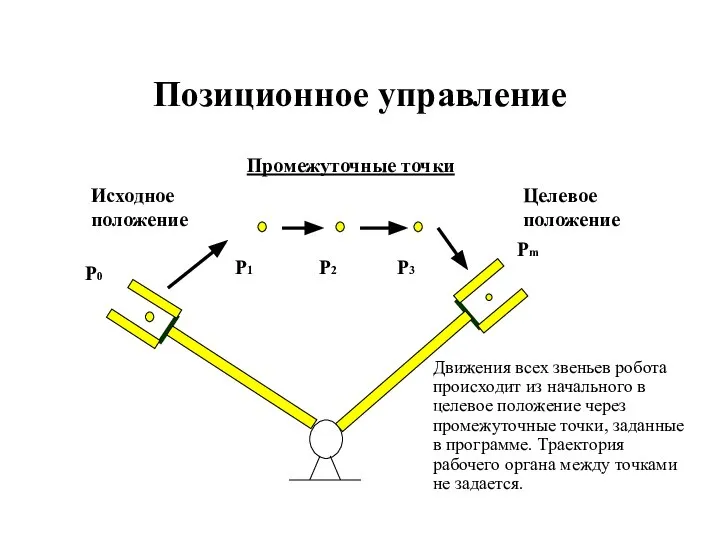
Позиционное управление
Исходное
положение
P0
Pm
Целевое положение
Промежуточные точки
P1
P2
P3
Движения всех звеньев робота происходит из начального
Позиционное управление
Исходное
положение
P0
Pm
Целевое положение
Промежуточные точки
P1
P2
P3
Движения всех звеньев робота происходит из начального

Позиционное управление:
роботизированная точечная сварка (COMAU Robot)
загрузка технологического оборудования (REIS
Позиционное управление: роботизированная точечная сварка (COMAU Robot) загрузка технологического оборудования (REIS
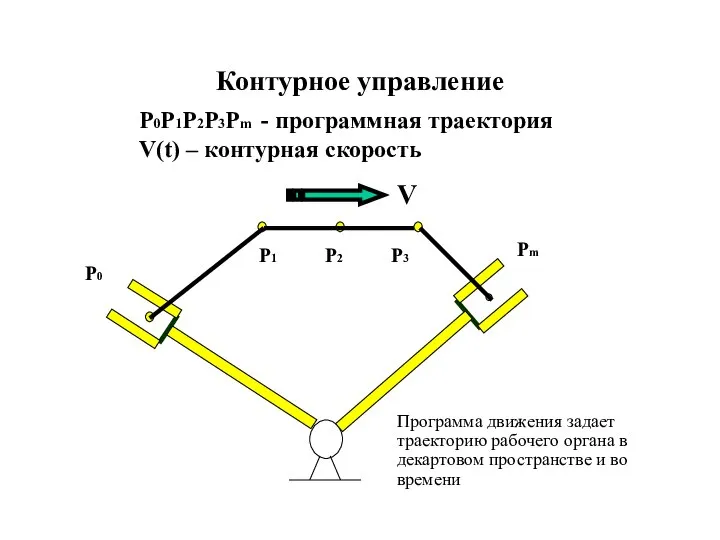
Контурное управление
P0
Pm
P0P1P2P3Pm - программная траектория
V(t) – контурная скорость
P1
P2
P3
V
Программа движения задает
Контурное управление
P0
Pm
P0P1P2P3Pm - программная траектория
V(t) – контурная скорость
P1
P2
P3
V
Программа движения задает

Контурное управление :
роботизированная окраска (FANUC Robot) лазерная резка (REIS Robot)
Контурное управление :
роботизированная окраска (FANUC Robot) лазерная резка (REIS Robot)

Адаптивное управление: Робототехнологический комплекс
(МГТУ Станкин - Будапештский ТУ)
1 – манипулятор PUMA-560,
Адаптивное управление: Робототехнологический комплекс
(МГТУ Станкин - Будапештский ТУ)
1 – манипулятор PUMA-560,
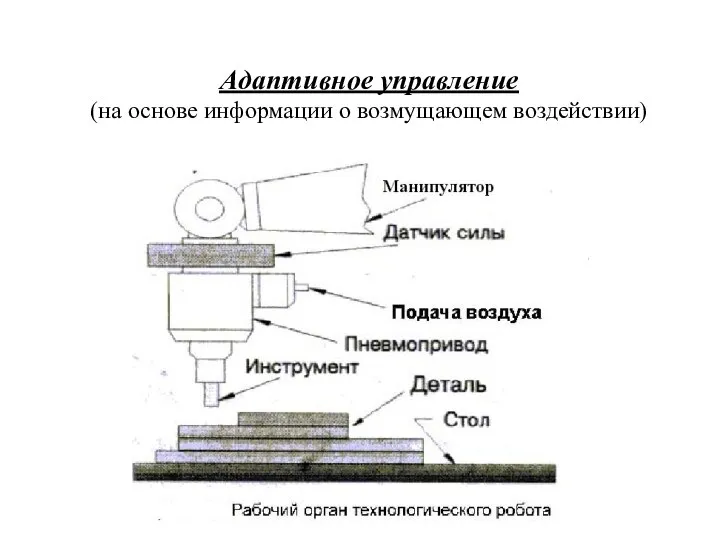
Адаптивное управление
(на основе информации о возмущающем воздействии)
Адаптивное управление
(на основе информации о возмущающем воздействии)
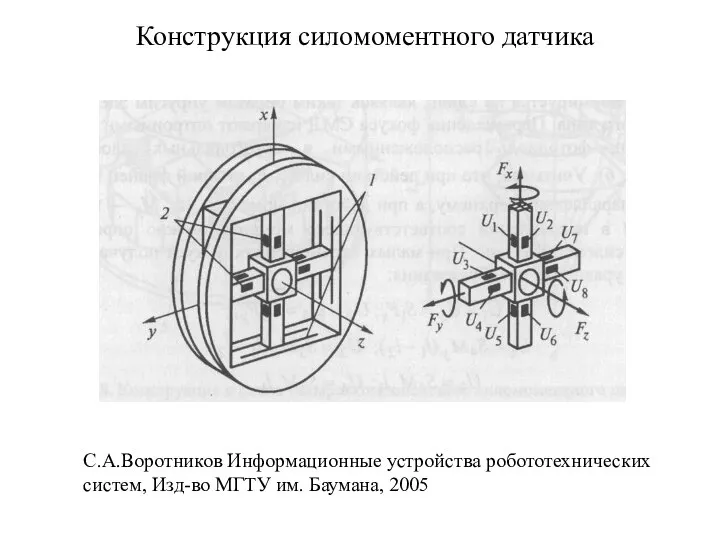
Конструкция силомоментного датчика
С.А.Воротников Информационные устройства робототехнических систем, Изд-во МГТУ им. Баумана,
Конструкция силомоментного датчика
С.А.Воротников Информационные устройства робототехнических систем, Изд-во МГТУ им. Баумана,
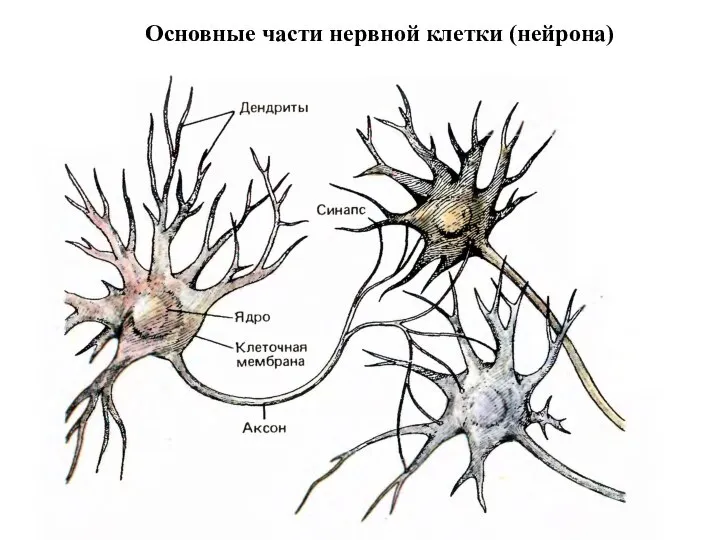
Основные части нервной клетки (нейрона)
Основные части нервной клетки (нейрона)
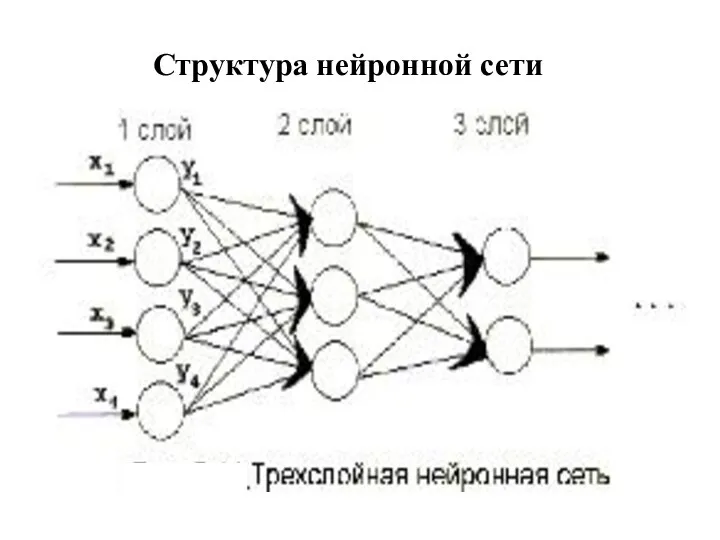
Структура нейронной сети
ANNs are taught by system developer at concrete cases.
Структура нейронной сети
ANNs are taught by system developer at concrete cases.
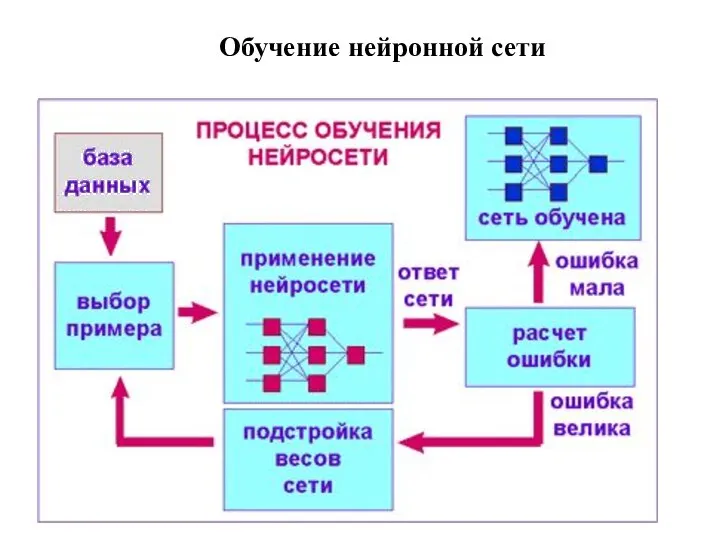
Обучение нейронной сети
Обучение нейронной сети
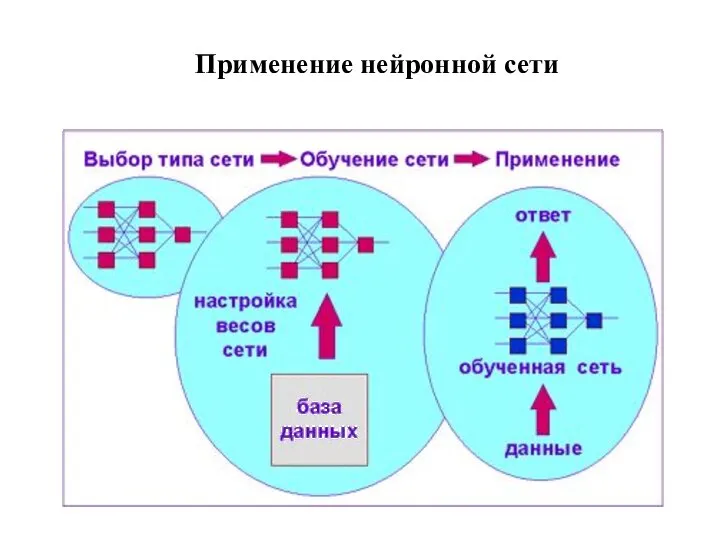
Применение нейронной сети
Применение нейронной сети
Кинематические задачи в робототехнике и мехатронике
- Прямая задача о положении многозвенного
Кинематические задачи в робототехнике и мехатронике - Прямая задача о положении многозвенного
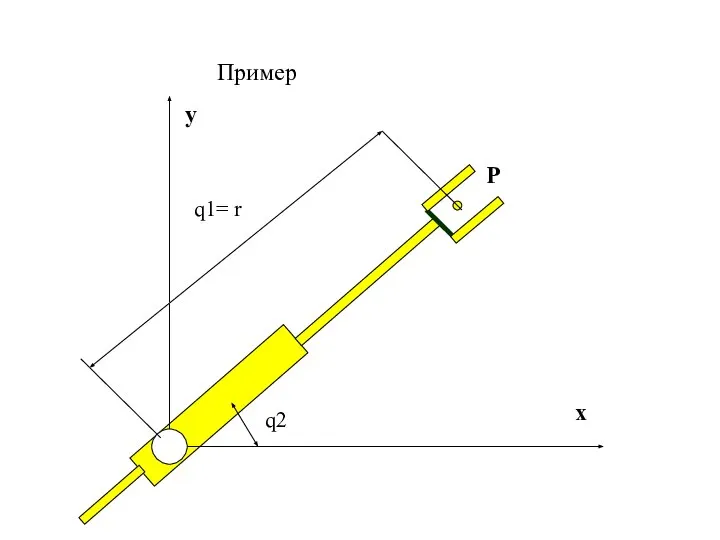
q1= r
q2
P
x
y
Пример
q1= r
q2
P
x
y
Пример
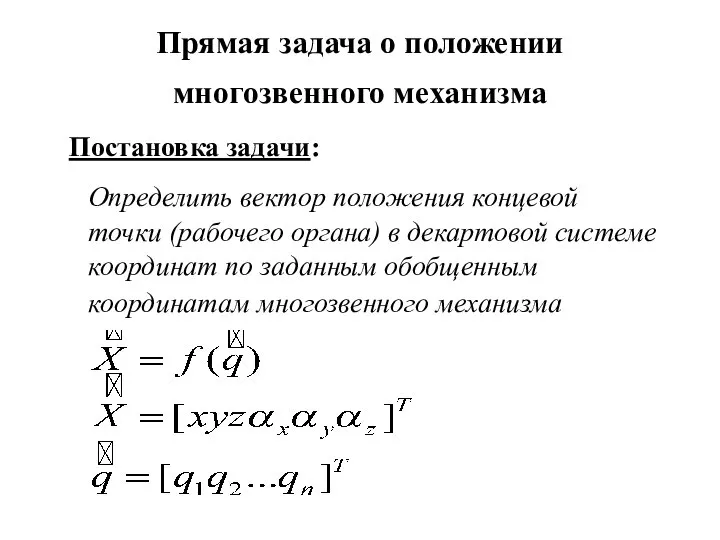
Прямая задача о положении многозвенного механизма
Постановка задачи:
Определить
Прямая задача о положении многозвенного механизма
Постановка задачи:
Определить
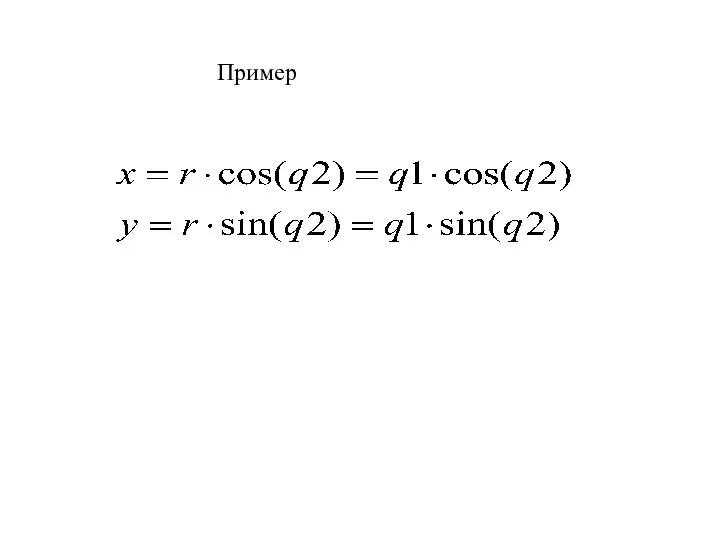
Пример
Пример
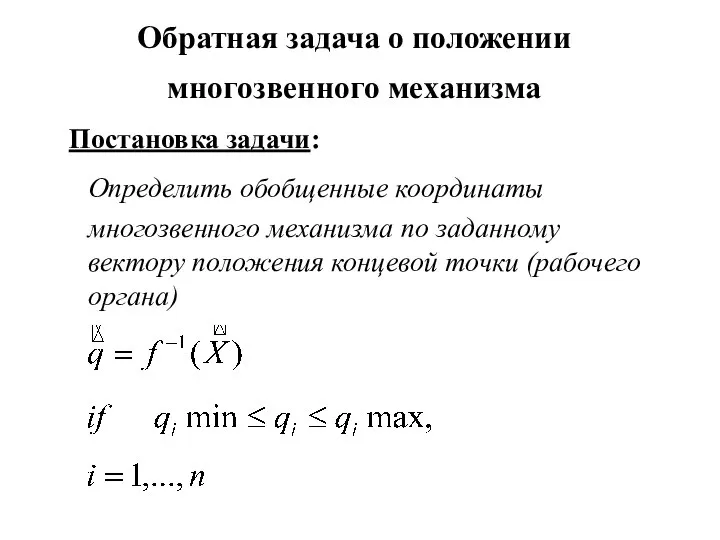
Обратная задача о положении многозвенного механизма
Постановка задачи:
Определить
Обратная задача о положении многозвенного механизма
Постановка задачи:
Определить
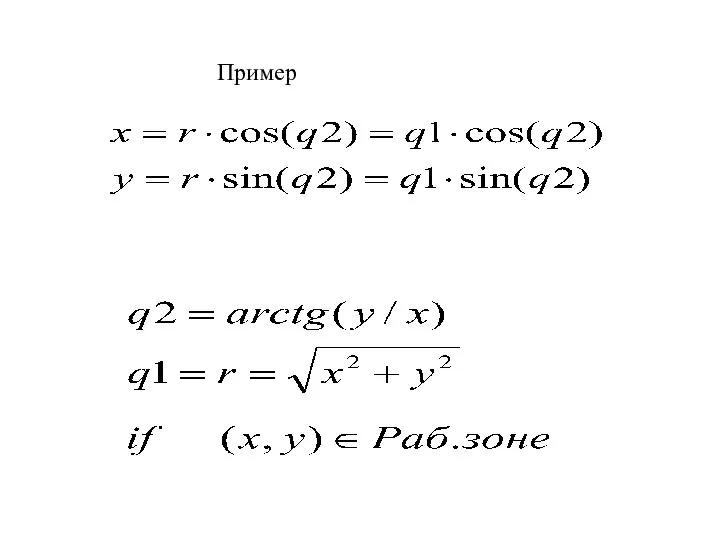
Пример
Пример
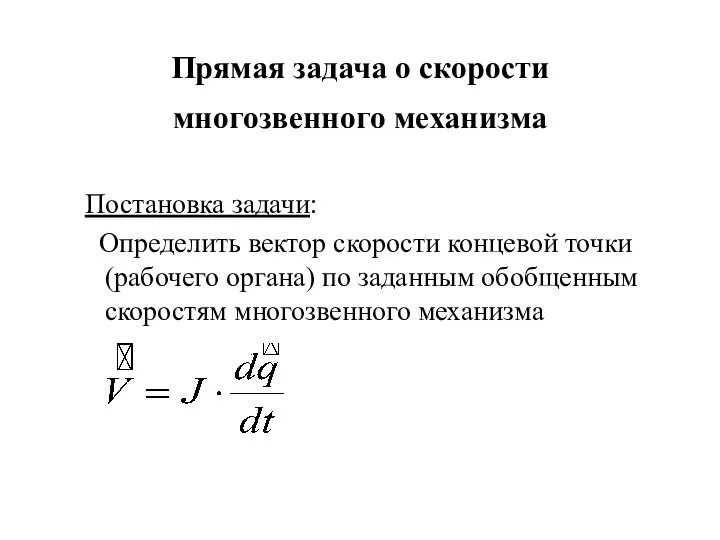
Прямая задача о скорости многозвенного механизма
Постановка задачи:
Определить
Прямая задача о скорости многозвенного механизма
Постановка задачи:
Определить
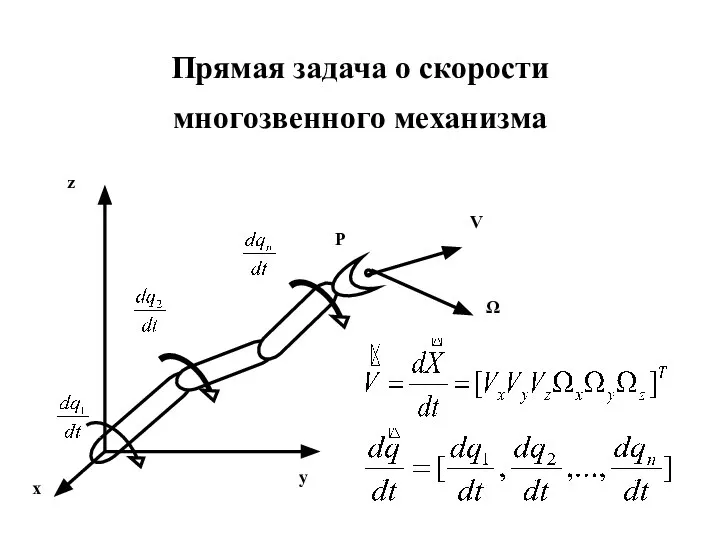
Прямая задача о скорости многозвенного механизма
z
y
x
P
V
Ω
Прямая задача о скорости многозвенного механизма
z
y
x
P
V
Ω
Пример
Пример
Обратная задача о скорости многозвенного механизма
Постановка задачи:
Определить
Обратная задача о скорости многозвенного механизма
Постановка задачи:
Определить
 Культура Китая в Средние века
Культура Китая в Средние века Презентация "Виды предпринимательской деятельности. Страховое предпринимательство" - скачать презентации по Экономике
Презентация "Виды предпринимательской деятельности. Страховое предпринимательство" - скачать презентации по Экономике Комбинаторные задачи и их решения - презентация по Алгебре
Комбинаторные задачи и их решения - презентация по Алгебре Презентация Международно-правовые основы таможенно-тарифного метода государственного регулирования внешнеторговой деятельност
Презентация Международно-правовые основы таможенно-тарифного метода государственного регулирования внешнеторговой деятельност Культура Республики Казахстан
Культура Республики Казахстан «Использование ИКТ в преподавании различных школьных дисциплин»
«Использование ИКТ в преподавании различных школьных дисциплин» Алгоритмические основы трехмерной графики
Алгоритмические основы трехмерной графики «Театральные уроки». Социально-образовательный проект
«Театральные уроки». Социально-образовательный проект Види підрядних речень
Види підрядних речень Энтеробактерии СПбГУ 2008г.
Энтеробактерии СПбГУ 2008г.  Технология строительного производства. Транспортирование строительных грузов
Технология строительного производства. Транспортирование строительных грузов Рецепт
Рецепт Категоризация культур
Категоризация культур Матрицы
Матрицы Решение неравенств с одной переменной Алгебра 8 класс
Решение неравенств с одной переменной Алгебра 8 класс  Изображение фигуры человека. 7 класс
Изображение фигуры человека. 7 класс Презентация на тему "Наркомания" - скачать презентации по Медицине
Презентация на тему "Наркомания" - скачать презентации по Медицине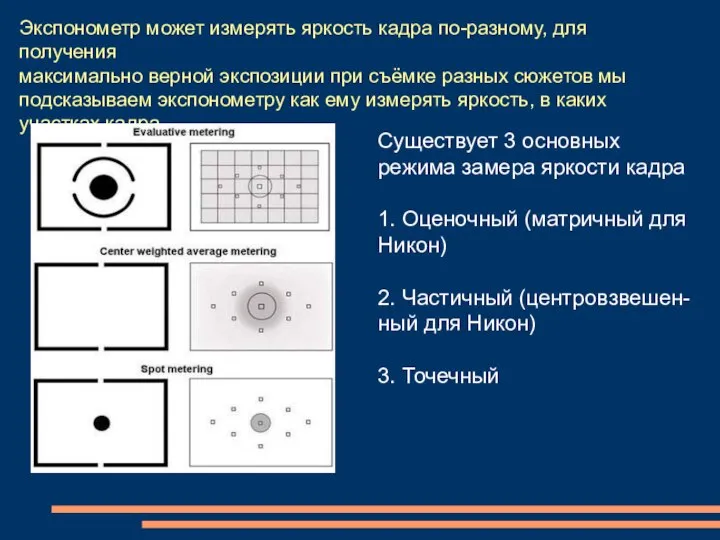 Экспонометр
Экспонометр Векторное произведение двух векторов - презентация по Алгебре
Векторное произведение двух векторов - презентация по Алгебре Іван Франко і сьогодення
Іван Франко і сьогодення Основи мови програмування Java. (Лекція 9)
Основи мови програмування Java. (Лекція 9) «Храмы Кубани» Учитель МОУ СОШ № 10 ст. Новомышастовской С. С. Малютина
«Храмы Кубани» Учитель МОУ СОШ № 10 ст. Новомышастовской С. С. Малютина Программа курса “Введение в тестирование ПО”. Статическое тестирование
Программа курса “Введение в тестирование ПО”. Статическое тестирование Владимирская область г. Вязники МБДОУ «Центр развития ребёнка – детский сад № 29 «Улыбка»» Цирковая студия «Балаганчик» руковод
Владимирская область г. Вязники МБДОУ «Центр развития ребёнка – детский сад № 29 «Улыбка»» Цирковая студия «Балаганчик» руковод Понятия «чистая совесть», «муки совести», «чувство стыда». Подготовила : студентка 1 курса юридического факультета гр
Понятия «чистая совесть», «муки совести», «чувство стыда». Подготовила : студентка 1 курса юридического факультета гр Исследование систем управления
Исследование систем управления  Хлор в организме человека
Хлор в организме человека Причинение вреда здоровью Подготовили студентки ФТД-4 Группы Т-094 Зайцева Виктория, Шевченко Наталья.
Причинение вреда здоровью Подготовили студентки ФТД-4 Группы Т-094 Зайцева Виктория, Шевченко Наталья.