- Динамика механической системы и твердого тела

Содержание
- 2. КЛАССИФИКАЦИЯ СВЯЗЕЙ. 1. Связи делятся на стационарные и нестационарные. Опр. Связями называются любого вида ограничения, которые
- 3. 2. Связи делятся на геометрические и кинематические (дифференциальными). Опр. Связи, налагающие ограничения на положение (координаты) точек
- 4. По виду связей механические системы тоже разделяются на голономные (с голономными связями) и неголономные (содержащие неголономные
- 5. Действие связей можно учитывать не только вводя их реакции, но и рассматривая перемещения, которые точки механической
- 6. Возможное перемещение точки отличается от действительного прежде всего тем, что она его не совершает, а только
- 7. Опр. Число независимых между собой возможных перемещений механической системы называется числом степеней свободы этой системы. Вывод.
- 8. Возможная работа активной силы а возможная работа реакции обозначается символом Опр. Возможной работой называется элементарная работа,
- 9. Опр. Идеальными называются связи, для которых элементарная работа их реакций на любом возможном перемещении системы равна
- 10. Механизм, расположенный в горизонтальной плоскости, находится под действием приложенных силы Q и двух пар сил с
- 12. Скачать презентацию
КЛАССИФИКАЦИЯ СВЯЗЕЙ.
1. Связи делятся на стационарные и нестационарные.
Опр. Связями называются любого
КЛАССИФИКАЦИЯ СВЯЗЕЙ.
1. Связи делятся на стационарные и нестационарные.
Опр. Связями называются любого
2. Связи делятся на геометрические и кинематические (дифференциальными).
Опр. Связи, налагающие ограничения
2. Связи делятся на геометрические и кинематические (дифференциальными).
Опр. Связи, налагающие ограничения
По виду связей механические системы тоже разделяются на голономные (с голономными
По виду связей механические системы тоже разделяются на голономные (с голономными
Действие связей можно учитывать не только вводя их реакции, но и
Действие связей можно учитывать не только вводя их реакции, но и
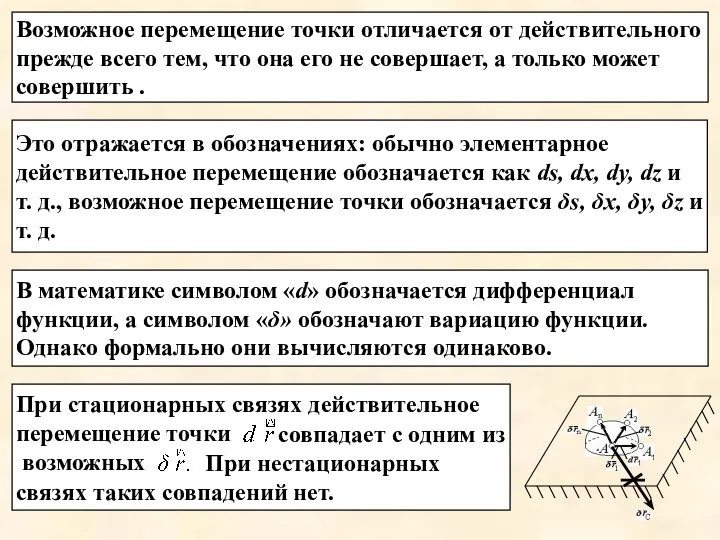
Возможное перемещение точки отличается от действительного прежде всего тем, что она
Возможное перемещение точки отличается от действительного прежде всего тем, что она
Опр. Число независимых между собой возможных перемещений механической системы называется числом
Опр. Число независимых между собой возможных перемещений механической системы называется числом
Возможная работа активной силы
а возможная работа реакции
обозначается символом
Опр.
Возможная работа активной силы
а возможная работа реакции
обозначается символом
Опр.
Опр. Идеальными называются связи, для которых элементарная работа их реакций на
Опр. Идеальными называются связи, для которых элементарная работа их реакций на
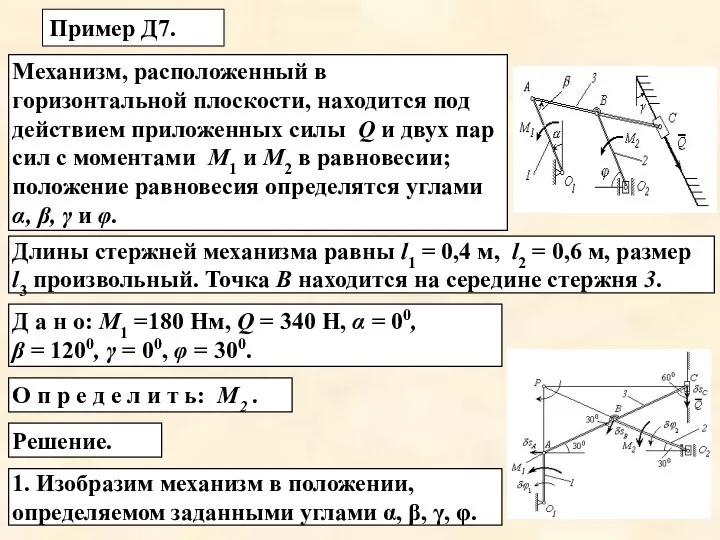
Механизм, расположенный в горизонтальной плоскости, находится под действием приложенных силы Q
Механизм, расположенный в горизонтальной плоскости, находится под действием приложенных силы Q
 Сибирское таможенное управление
Сибирское таможенное управление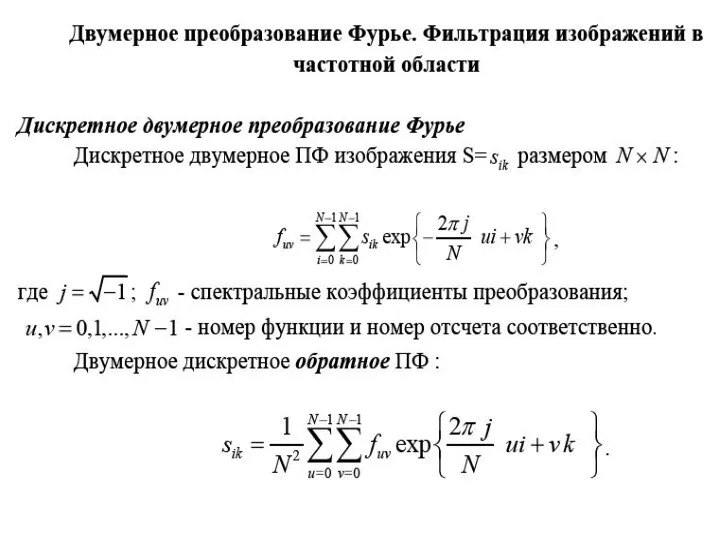 Фурье
Фурье Туркеста́но-Сиби́рская магистра́ль
Туркеста́но-Сиби́рская магистра́ль Достопримечательности Лондона
Достопримечательности Лондона Perfekt
Perfekt Нравственно-патриотическое воспитание дошкольников через ознакомление с традициями и культурой своего народа
Нравственно-патриотическое воспитание дошкольников через ознакомление с традициями и культурой своего народа РЕЗЕРВНЫЙ ФОНД,ЕГО ЗНАЧЕНИЕ ДЛЯ РОССИЙСКОЙ ЭКОНОМИКИ ВЫПОЛНИЛА СТУДЕНТКА 4 КУРСА ГРУППЫ Т-081 УЛАН КЫЗЫ АЙГЕРИМ
РЕЗЕРВНЫЙ ФОНД,ЕГО ЗНАЧЕНИЕ ДЛЯ РОССИЙСКОЙ ЭКОНОМИКИ ВЫПОЛНИЛА СТУДЕНТКА 4 КУРСА ГРУППЫ Т-081 УЛАН КЫЗЫ АЙГЕРИМ Особенности выполнения программ AVR-МК
Особенности выполнения программ AVR-МК Презентация Разделение властей и система противовесов в Афинах
Презентация Разделение властей и система противовесов в Афинах  Изображение весны в творчестве русских живописцев
Изображение весны в творчестве русских живописцев Православный праздник пасхи
Православный праздник пасхи Бұл қазақ халқының ең бірінші панасы
Бұл қазақ халқының ең бірінші панасы Моє хобі - футбол
Моє хобі - футбол Грузовая авианакладная
Грузовая авианакладная Плиты с деревянным каркасом. Конструирование и расчет. Пластмассовые плиты
Плиты с деревянным каркасом. Конструирование и расчет. Пластмассовые плиты Презентация на тему Можно ли жить и не дышать?
Презентация на тему Можно ли жить и не дышать? Школа футбольного арбитра. Правило 9. Мяч в игре и не в игре
Школа футбольного арбитра. Правило 9. Мяч в игре и не в игре Презентация Металлоизделия
Презентация Металлоизделия Онкология Лекция для студентов III курса врачебных факультетов Профессор В.И.Тихонов
Онкология Лекция для студентов III курса врачебных факультетов Профессор В.И.Тихонов  SLF4J project
SLF4J project  Русская прялка
Русская прялка Граждане как субъекты административного права
Граждане как субъекты административного права Датчики. Лямбда-зонд, датчики частоты вращения коленвала и распредвал
Датчики. Лямбда-зонд, датчики частоты вращения коленвала и распредвал Крещение Господне
Крещение Господне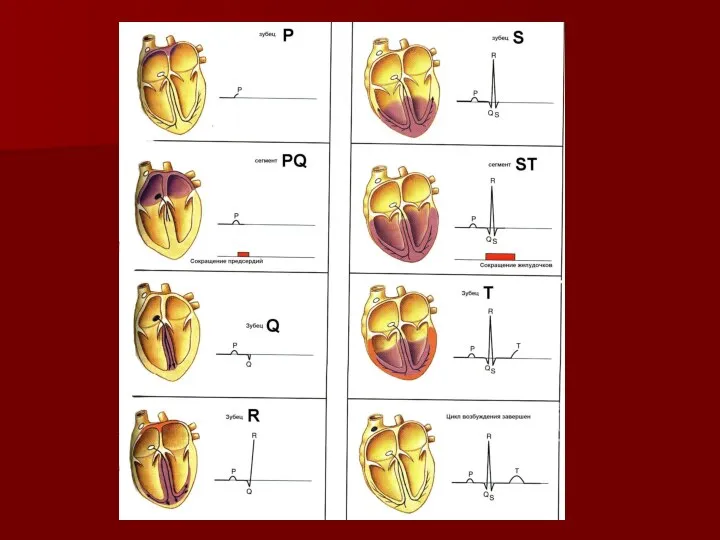 ЭКГ у детей
ЭКГ у детей История медицины в Китае и Тибете
История медицины в Китае и Тибете  Министерство Юстиции РФ
Министерство Юстиции РФ  Киберпреступность
Киберпреступность