- Динамика механизмов и машин

Содержание
- 2. Цели динамического анализа: - определение внешних сил, действующих на звенья меха-низма; определение усилий возникающих в кинематических
- 3. 5 Силы, действующие на звенья механизмов. 5.1 Движущие силы и силы технологического сопро- тивления В работающем
- 4. движущие силы и силы технологического сопротивления. Движущие силы и моменты сил возникают при взаимодей-ствии входных звеньев
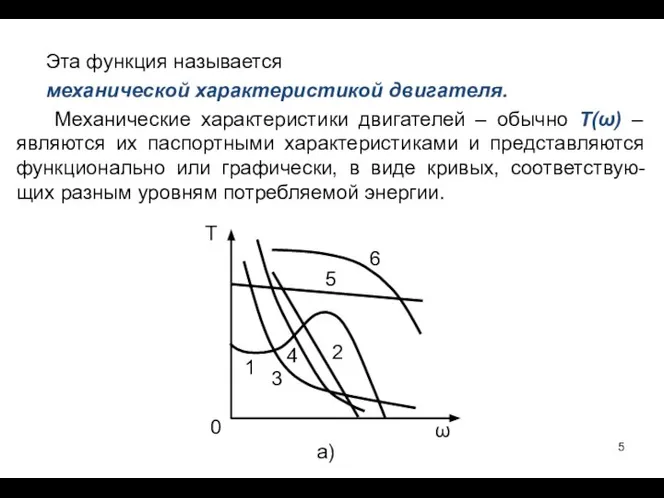
- 5. Эта функция называется механической характеристикой двигателя. Механические характеристики двигателей – обычно Т(ω) – являются их паспортными
- 6. Рисунок 5.1а – Типовые механические характеристики различных двигателей 1 – асинхронного электродвигателя; 2,3 – электродвигателей постоянного
- 7. Силы и моменты сил технологического сопротивления возникают как результат взаимодействия выходных звеньев рас-сматриваемого механизма со звеньями
- 8. Принято считать, что работа сил технологического соп-ротивления выходных звеньев имеет противоположный знак относительно работы движущих сил
- 9. Рисунок 5.1б – Типовые механические характеристики различных машин 1 – грузоподъёмной машины; 2 – центробежного насоса;
- 10. Рисунок 5.1в – Типовые механические характеристики различных двигателей (а), и машин (б) При сравнении механических характеристик
- 11. 5.2 Силы инерции звеньев Так как звенья реальных механизмов имеют массы, то при изменении их положений
- 12. Поэтому практические инженерные силовые расчёты ме-ханизмов проводят в два этапа. Первоначально расчёт выполняют, учитывая действие сил
- 13. Следует, однако, помнить, что звенья реального механиз-ма находятся в движении, и, следовательно, в действитель-ности никакого равновесия
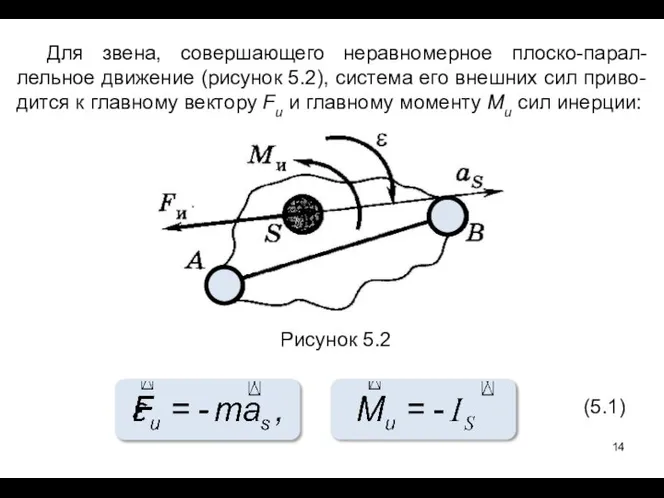
- 14. Для звена, совершающего неравномерное плоско-парал-лельное движение (рисунок 5.2), система его внешних сил приво-дится к главному вектору
- 15. В формулах 5.1: m – масса звена, FИ – сила инерции, приложенная к центру масс S,
- 16. 5.3 Силы трения 5.3.1 Силы трения скольжения В элементах кинематических пар при относительных пе-ремещениях звеньев возникают
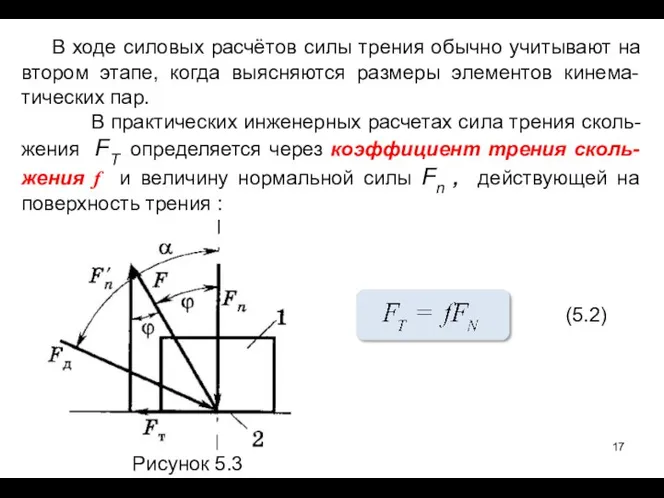
- 17. В ходе силовых расчётов силы трения обычно учитывают на втором этапе, когда выясняются размеры элементов кинема-тических
- 18. Рисунок 5.3 иллюстрирует следующую связь коэффици-ента трения с действующими силами:
- 19. Угол φ называют углом трения. Величина коэффициента f определяется экспериментально для различных сочетаний материалов трущихся поверхностей,
- 20. Отсюда следует, что движение возможно при условии, что: α ≥ φ или tgα ≥ f. Следовательно,
- 21. 5.4 Силы трения качения При действии сил в элементах высших кинематических пар возникает явление сопротивления перекатыванию
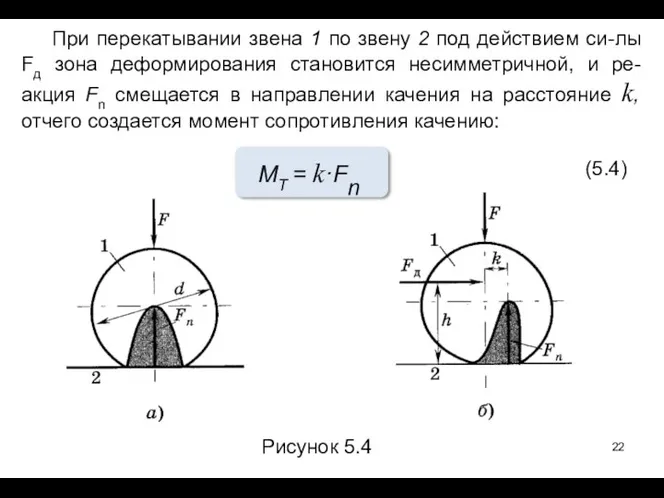
- 22. При перекатывании звена 1 по звену 2 под действием си-лы Fд зона деформирования становится несимметричной, и
- 23. Величина k называется коэффициентом трения качения. Он имеет размерность длины. В зависимости от сочета-ния материалов высшей
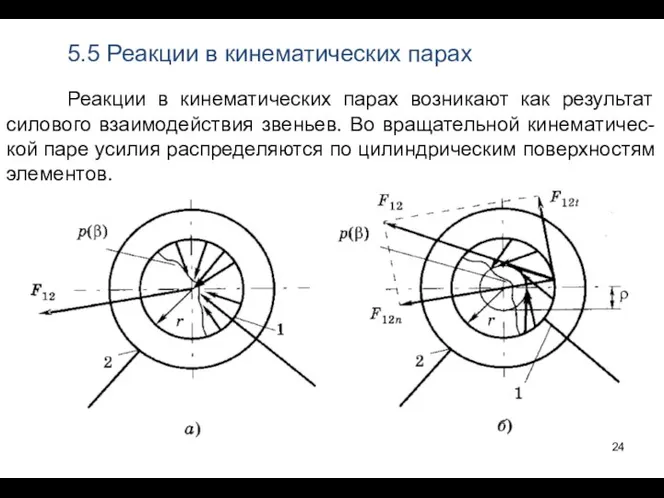
- 24. 5.5 Реакции в кинематических парах Реакции в кинематических парах возникают как результат силового взаимодействия звеньев. Во
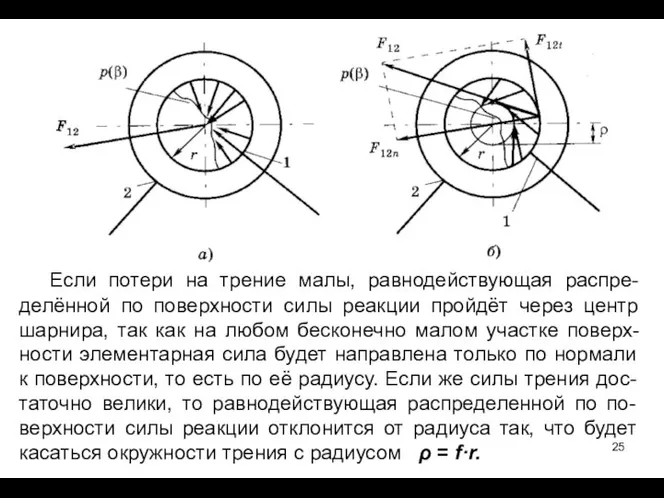
- 25. Если потери на трение малы, равнодействующая распре-делённой по поверхности силы реакции пройдёт через центр шарнира, так
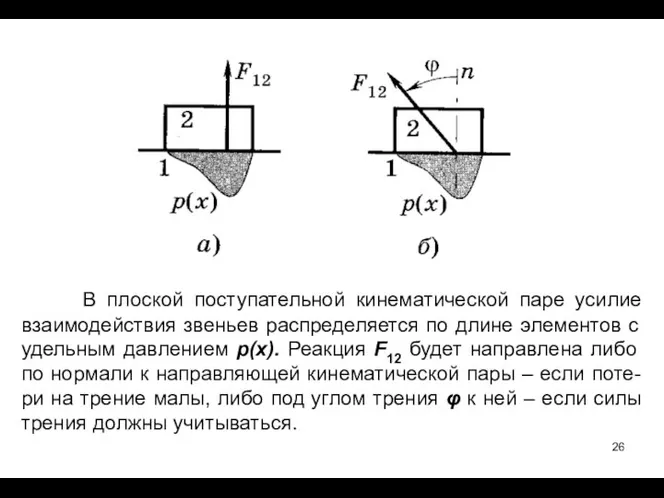
- 26. В плоской поступательной кинематической паре усилие взаимодействия звеньев распределяется по длине элементов с удельным давлением р(х).
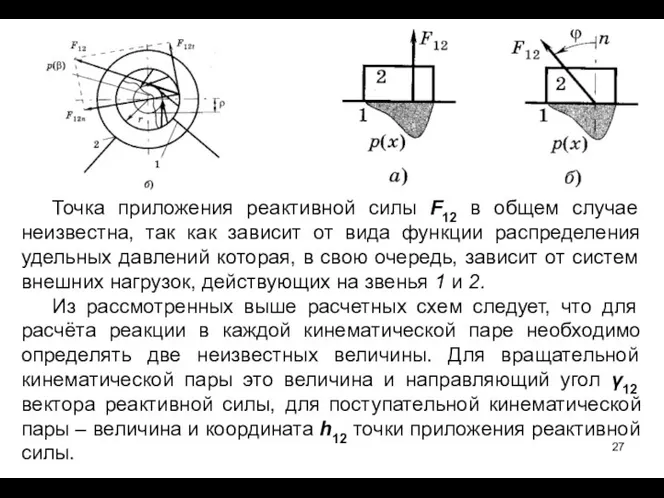
- 27. Точка приложения реактивной силы F12 в общем случае неизвестна, так как зависит от вида функции распределения
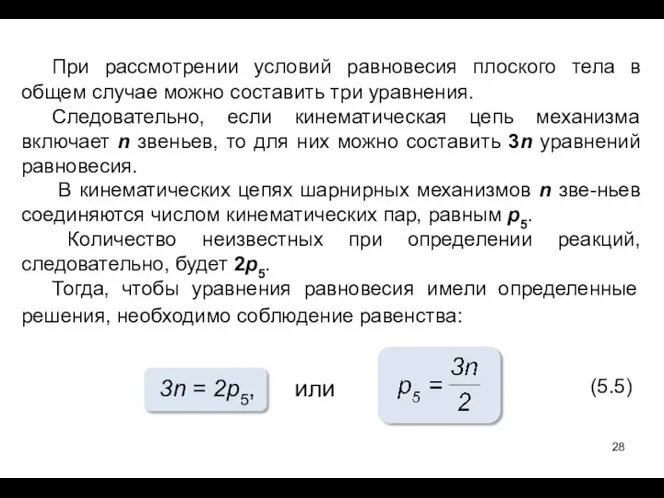
- 28. При рассмотрении условий равновесия плоского тела в общем случае можно составить три уравнения. Следовательно, если кинематическая
- 30. Скачать презентацию
Цели динамического анализа:
- определение внешних сил, действующих на звенья меха-низма;
Цели динамического анализа:
- определение внешних сил, действующих на звенья меха-низма;
5 Силы, действующие на звенья механизмов.
5.1 Движущие силы и
5 Силы, действующие на звенья механизмов.
5.1 Движущие силы и
движущие силы
и
силы технологического сопротивления.
Движущие силы и
движущие силы
и
силы технологического сопротивления.
Движущие силы и
Эта функция называется
механической характеристикой двигателя.
Механические характеристики двигателей – обычно Т(ω)
механической характеристикой двигателя.
Механические характеристики двигателей – обычно Т(ω)
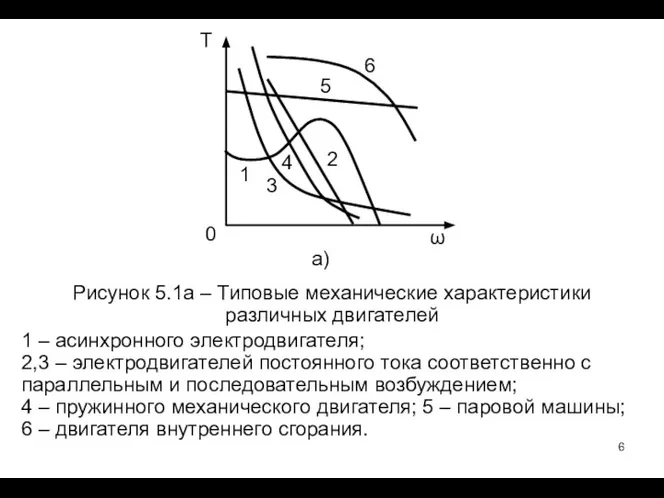
Рисунок 5.1а – Типовые механические характеристики различных двигателей
1 – асинхронного электродвигателя;
Рисунок 5.1а – Типовые механические характеристики различных двигателей
1 – асинхронного электродвигателя;
Силы и моменты сил технологического сопротивления возникают как результат взаимодействия
Силы и моменты сил технологического сопротивления возникают как результат взаимодействия
Принято считать, что работа сил технологического соп-ротивления выходных звеньев имеет противоположный
Принято считать, что работа сил технологического соп-ротивления выходных звеньев имеет противоположный
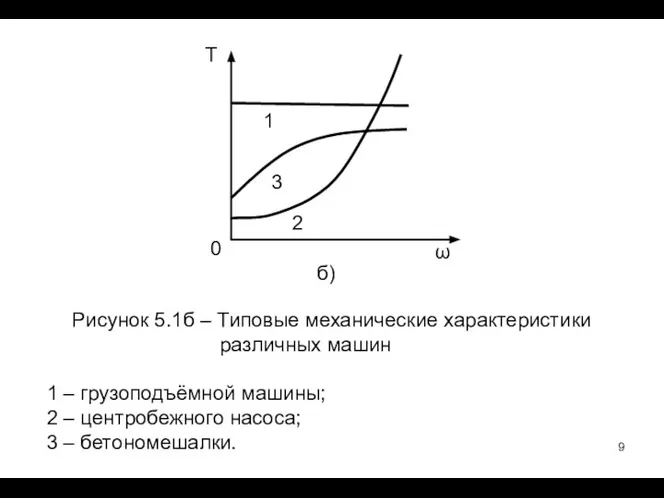
Рисунок 5.1б – Типовые механические характеристики
различных машин
1 – грузоподъёмной машины;
Рисунок 5.1б – Типовые механические характеристики
различных машин
1 – грузоподъёмной машины;
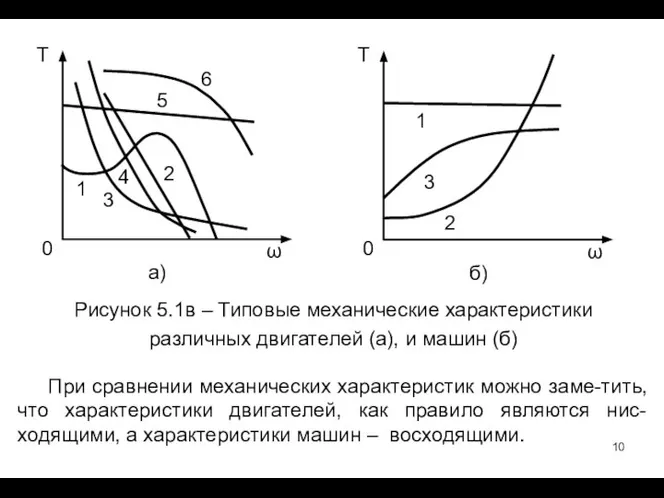
Рисунок 5.1в – Типовые механические характеристики
различных двигателей (а), и машин (б)
При
Рисунок 5.1в – Типовые механические характеристики
различных двигателей (а), и машин (б)
При
5.2 Силы инерции звеньев
Так как звенья реальных механизмов имеют массы, то
5.2 Силы инерции звеньев
Так как звенья реальных механизмов имеют массы, то
Поэтому практические инженерные силовые расчёты ме-ханизмов проводят в два этапа.
Первоначально расчёт
Поэтому практические инженерные силовые расчёты ме-ханизмов проводят в два этапа.
Первоначально расчёт
Следует, однако, помнить, что звенья реального механиз-ма находятся в движении, и,
Следует, однако, помнить, что звенья реального механиз-ма находятся в движении, и,
Для звена, совершающего неравномерное плоско-парал-лельное движение (рисунок 5.2), система его внешних
Для звена, совершающего неравномерное плоско-парал-лельное движение (рисунок 5.2), система его внешних
В формулах 5.1:
m – масса звена,
FИ – сила инерции, приложенная
В формулах 5.1:
m – масса звена,
FИ – сила инерции, приложенная
5.3 Силы трения
5.3.1 Силы трения скольжения
В элементах кинематических пар при относительных
5.3 Силы трения
5.3.1 Силы трения скольжения
В элементах кинематических пар при относительных
В ходе силовых расчётов силы трения обычно учитывают на втором этапе,
В ходе силовых расчётов силы трения обычно учитывают на втором этапе,
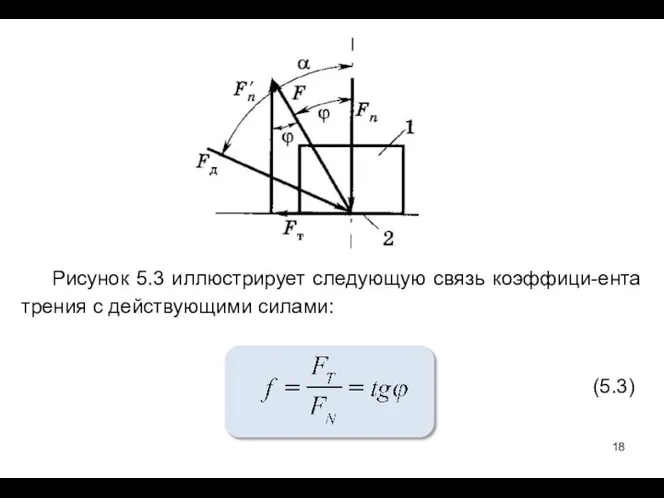
Рисунок 5.3 иллюстрирует следующую связь коэффици-ента трения с действующими силами:
Рисунок 5.3 иллюстрирует следующую связь коэффици-ента трения с действующими силами:
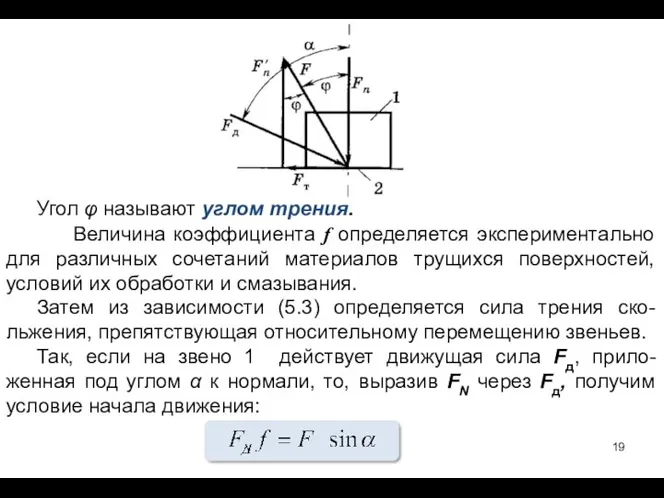
Угол φ называют углом трения.
Величина коэффициента f определяется экспериментально
Угол φ называют углом трения.
Величина коэффициента f определяется экспериментально
Отсюда следует, что движение возможно при условии, что:
α ≥ φ
Отсюда следует, что движение возможно при условии, что:
α ≥ φ
5.4 Силы трения качения
При действии сил в элементах высших кинематических пар
5.4 Силы трения качения
При действии сил в элементах высших кинематических пар
При перекатывании звена 1 по звену 2 под действием си-лы Fд
При перекатывании звена 1 по звену 2 под действием си-лы Fд
Величина k называется
коэффициентом трения качения.
Он имеет размерность длины. В зависимости
Величина k называется
коэффициентом трения качения.
Он имеет размерность длины. В зависимости
5.5 Реакции в кинематических парах
Реакции в кинематических парах возникают как результат
5.5 Реакции в кинематических парах
Реакции в кинематических парах возникают как результат
Если потери на трение малы, равнодействующая распре-делённой по поверхности силы реакции
Если потери на трение малы, равнодействующая распре-делённой по поверхности силы реакции
В плоской поступательной кинематической паре усилие взаимодействия звеньев распределяется по длине
В плоской поступательной кинематической паре усилие взаимодействия звеньев распределяется по длине
Точка приложения реактивной силы F12 в общем случае неизвестна, так как
Точка приложения реактивной силы F12 в общем случае неизвестна, так как
При рассмотрении условий равновесия плоского тела в общем случае можно составить
При рассмотрении условий равновесия плоского тела в общем случае можно составить
 Общие правила выполнения чертежей
Общие правила выполнения чертежей Технология цифрового телевидения
Технология цифрового телевидения ПУТЕШЕСТВИЕ ПО СТРАНЕ ПРОФЕССИОНАЛИЯ
ПУТЕШЕСТВИЕ ПО СТРАНЕ ПРОФЕССИОНАЛИЯ  Конструкторы.Деструктор
Конструкторы.Деструктор  Проектирование программных систем
Проектирование программных систем Бизнес-план
Бизнес-план Центральная регуляция стресс
Центральная регуляция стресс  С чем работаем? Полноценный мониторинг соц.медиа в рунете: Все самые популярные сервисы 1.Все самые популярные соц.сервисы 2.Монитор
С чем работаем? Полноценный мониторинг соц.медиа в рунете: Все самые популярные сервисы 1.Все самые популярные соц.сервисы 2.Монитор Бібліотека ВНЗ у веб-просторі
Бібліотека ВНЗ у веб-просторі Лекарственные растения.
Лекарственные растения. Символы в китайском искусстве. Китайский гороскоп.
Символы в китайском искусстве. Китайский гороскоп. Симметрия решетки
Симметрия решетки Форма государственного устройства
Форма государственного устройства Дизайн-проект и его реализация
Дизайн-проект и его реализация Чемпионат и мир
Чемпионат и мир Основные термины и определения рис. Графические символы мехатроники
Основные термины и определения рис. Графические символы мехатроники Замок Нидзё
Замок Нидзё Математика в архитектуре Древней Греции и средних веков. Ученик 9 а Рыбалкин Илья Руководитель: Рог
Математика в архитектуре Древней Греции и средних веков. Ученик 9 а Рыбалкин Илья Руководитель: Рог Умницы и умники ВЕЛИКАЯ ОТЕЧЕСТВЕННАЯ ВОЙНА
Умницы и умники ВЕЛИКАЯ ОТЕЧЕСТВЕННАЯ ВОЙНА Уравнение движения электропривода и его анализ. Приведение моментов к оси вращения вала электродвигателя. Лекция 3
Уравнение движения электропривода и его анализ. Приведение моментов к оси вращения вала электродвигателя. Лекция 3 Языкознание как комплексная гуманитарная дисциплина. Языкознание, или лингвистика
Языкознание как комплексная гуманитарная дисциплина. Языкознание, или лингвистика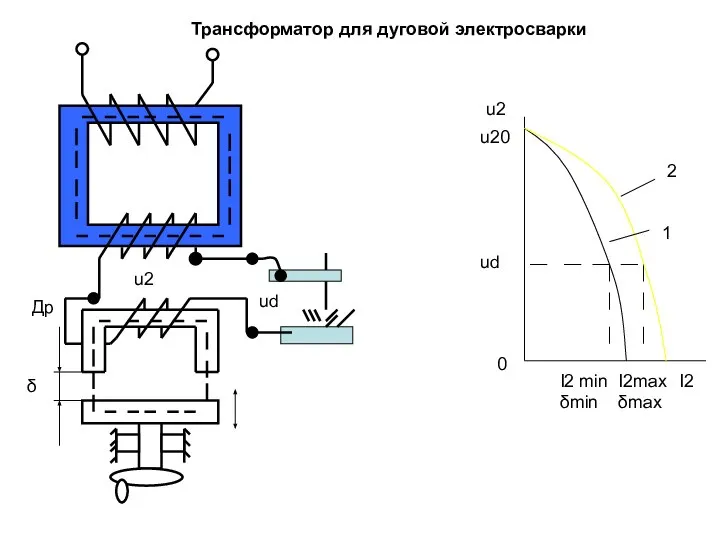 Трансформатор для дуговой электросварки
Трансформатор для дуговой электросварки  Использование современных технологий для проведения мониторинга физического состояния спортсменов и лиц, не занимающихся спорто
Использование современных технологий для проведения мониторинга физического состояния спортсменов и лиц, не занимающихся спорто Оценка деятельности Специалиста на фондовом рынке СПВБ
Оценка деятельности Специалиста на фондовом рынке СПВБ Свадебная атрибутика славян
Свадебная атрибутика славян Цифрові технології в мікроелектроніці
Цифрові технології в мікроелектроніці Причины и виды безработицы Экономические проблемы безработицы
Причины и виды безработицы Экономические проблемы безработицы Классификация зданий. Требования, предъявляемые к зданиям
Классификация зданий. Требования, предъявляемые к зданиям