- Двойственный симплекс-метод

Содержание
- 2. Введение Рассмотрим следующую задачу линейного программирования (ЗЛП):
- 3. Приведем рассматриваемую ЗЛП к каноническому виду: или
- 4. Рассмотрим расширенную матрицу системы линейных уравнений: Матрица содержит единичную подматрицу порядка 3 и следовательно, определяет базисное
- 5. Так как элементы (n+1=6)-го столбца матрицы системы не являются неотрицательными, то она не является К-матрицей ЗЛП.
- 6. В чем отличие двойственного симплекс-метода от обычного?? При решении задачи симплекс-методом текущее базисное решение является допустимым,
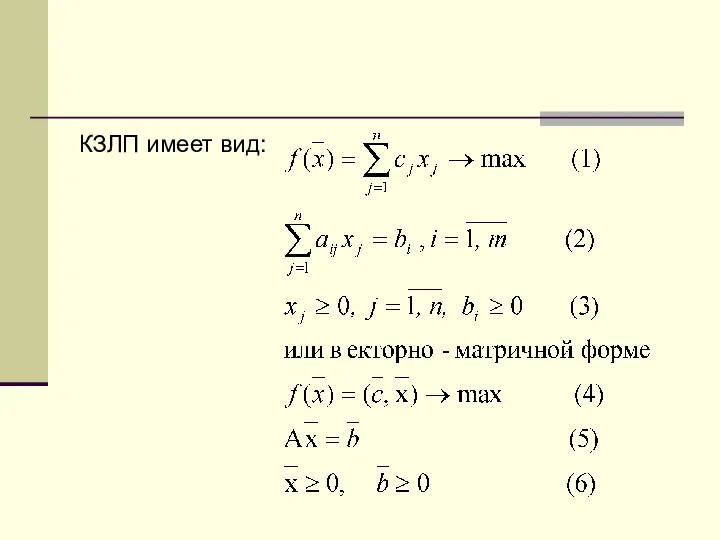
- 7. КЗЛП имеет вид:
- 8. Р-матрица. Определение Р-матрицей КЗЛП (1) –(3) называется расширенная матрица системы линейных уравнений, равносильной системе (2), содержащую
- 9. Условие перехода от одной Р-матрицы ЗЛП к другой Пусть известна Р-матрица , определяющая псевдоплан Условия перехода
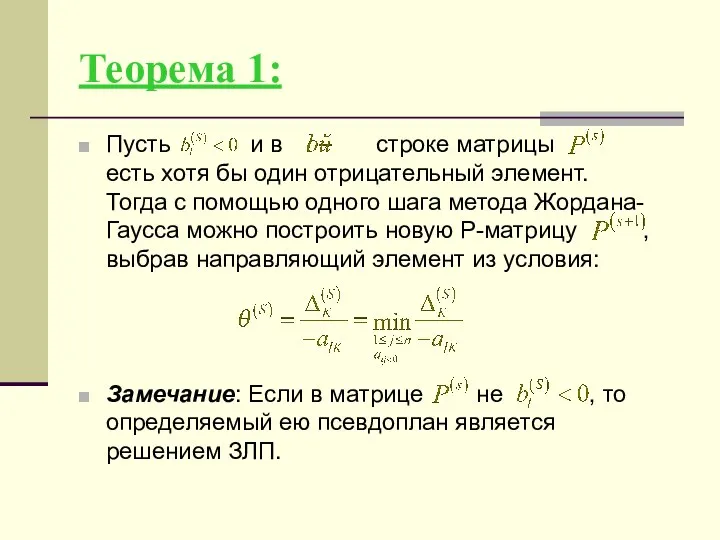
- 10. Теорема 1: Пусть и в строке матрицы есть хотя бы один отрицательный элемент. Тогда с помощью
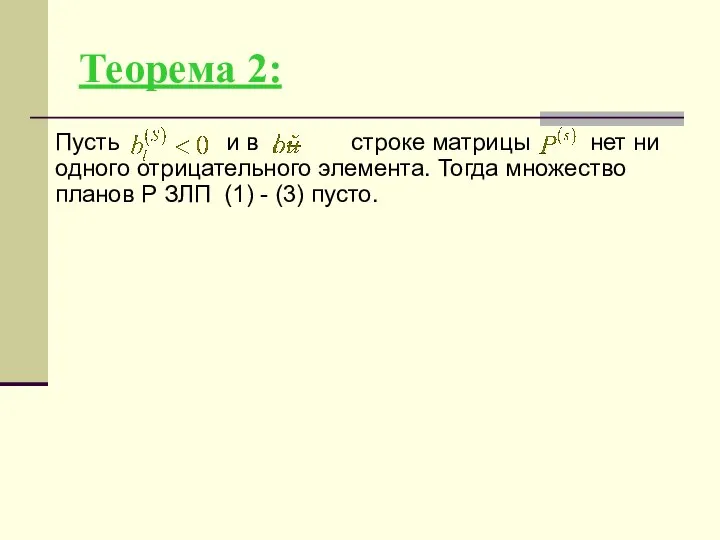
- 11. Теорема 2: Пусть и в строке матрицы нет ни одного отрицательного элемента. Тогда множество планов Р
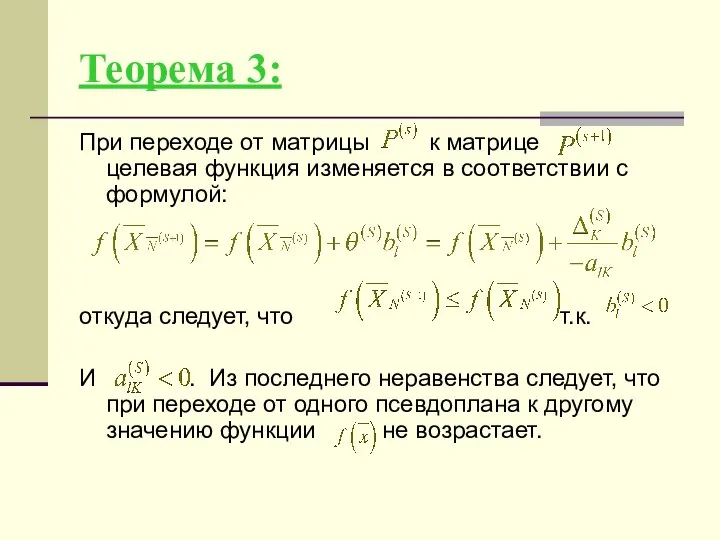
- 12. Теорема 3: При переходе от матрицы к матрице целевая функция изменяется в соответствии с формулой: откуда
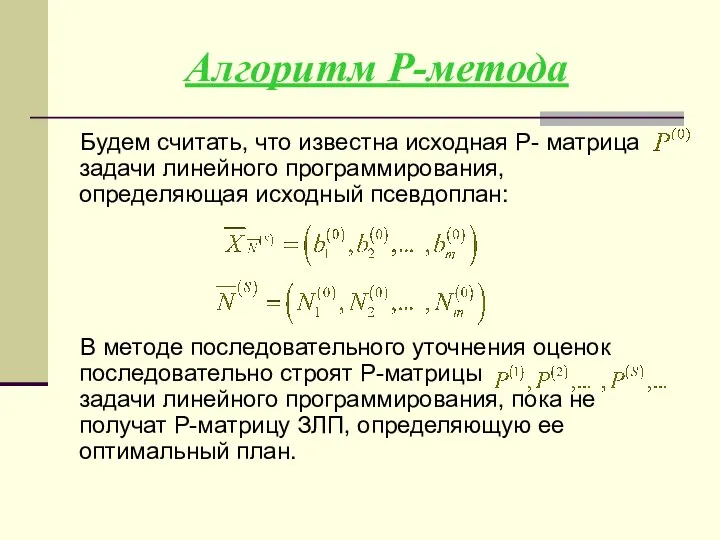
- 13. Алгоритм Р-метода Будем считать, что известна исходная Р- матрица задачи линейного программирования, определяющая исходный псевдоплан: В
- 14. Рассмотрим алгоритм S-ой итерации метода последовательного уточнения оценок. В начале S-ой итерации имеем Р-матрицу задачи линейного
- 15. ШАГ 2. Если , то псевдоплан является оптимальным опорным планом, а есть оптимальное значение линейной формы
- 16. ШАГ 3. Если то задача линейного программирования не имеет решения (множество планов Р пусто), иначе переходим
- 17. ШАГ 5. Вычисляем компоненты вектора ШАГ 6. Производим один шаг метода Жордана-Гаусса с направляющим элементом .
- 18. Решим задачу, которую мы начали пешать в начале презентации. Результаты решения приведены в симплекс-таблице.
- 19. Решим следующую ЗЛП:
- 20. Приводим ЗЛП к каноническому виду
- 21. Т.К. расширенная матрица системы линейных уравнений является Р-матрицей. Следовательно, к решению данного ЗЛП применим Р-метод.
- 22. Решим задачу, которую мы начали решать в начале презентации. Результаты решения приведены в симплекс-таблице.
- 24. Скачать презентацию
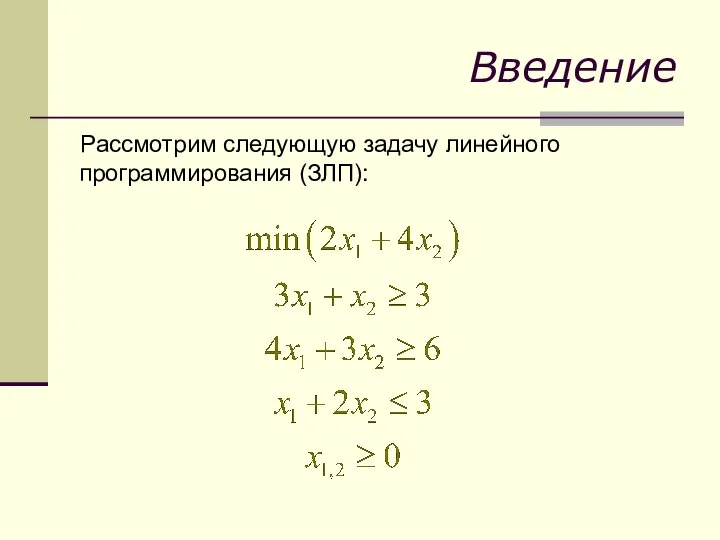
Введение
Рассмотрим следующую задачу линейного программирования (ЗЛП):
Введение
Рассмотрим следующую задачу линейного программирования (ЗЛП):
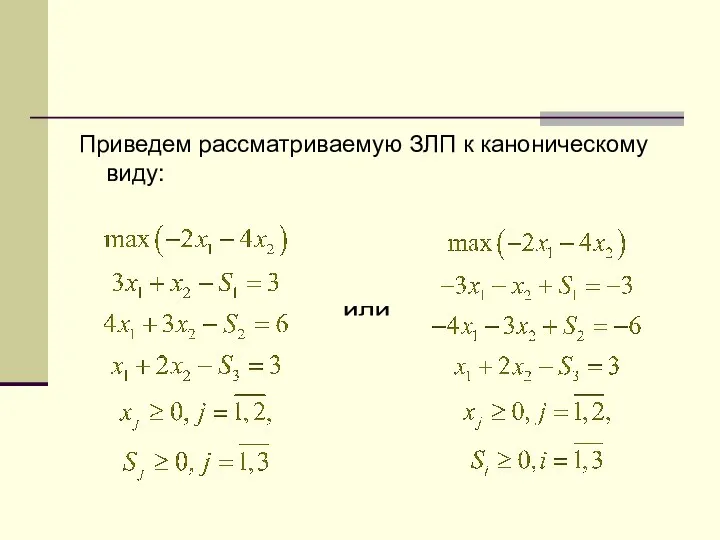
Приведем рассматриваемую ЗЛП к каноническому виду:
или
Приведем рассматриваемую ЗЛП к каноническому виду:
или
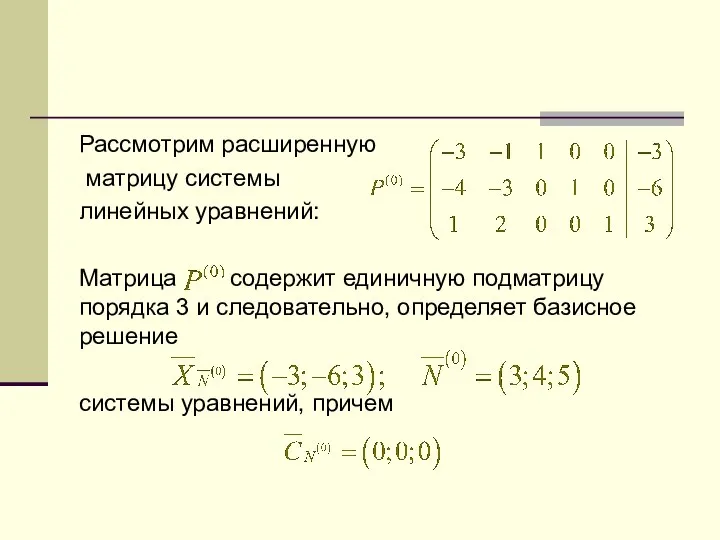
Рассмотрим расширенную
матрицу системы
линейных уравнений:
Матрица содержит единичную подматрицу порядка 3 и
Рассмотрим расширенную
матрицу системы
линейных уравнений:
Матрица содержит единичную подматрицу порядка 3 и
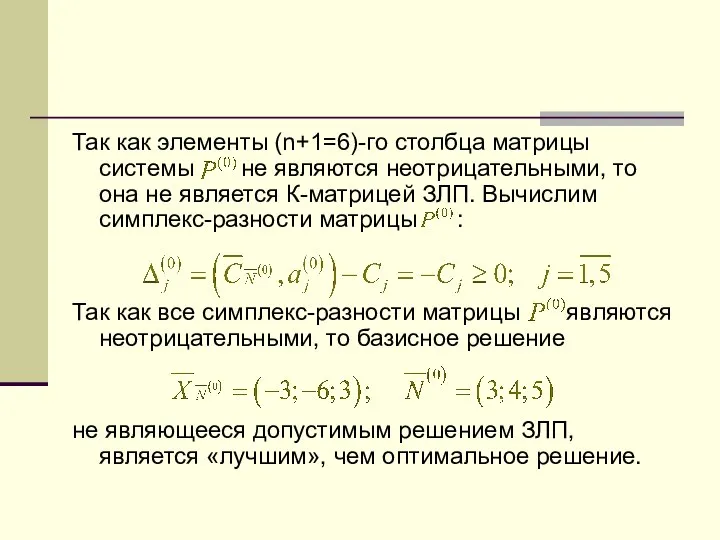
Так как элементы (n+1=6)-го столбца матрицы системы не являются неотрицательными, то
Так как элементы (n+1=6)-го столбца матрицы системы не являются неотрицательными, то
В чем отличие двойственного симплекс-метода от обычного??
При решении задачи симплекс-методом текущее
В чем отличие двойственного симплекс-метода от обычного??
При решении задачи симплекс-методом текущее
КЗЛП имеет вид:
КЗЛП имеет вид:
Р-матрица. Определение
Р-матрицей КЗЛП (1) –(3) называется расширенная матрица системы линейных уравнений,
Р-матрица. Определение
Р-матрицей КЗЛП (1) –(3) называется расширенная матрица системы линейных уравнений,
Условие перехода от одной Р-матрицы ЗЛП к другой
Пусть известна Р-матрица ,
Условие перехода от одной Р-матрицы ЗЛП к другой
Пусть известна Р-матрица ,
Теорема 1:
Пусть и в строке матрицы есть хотя бы один отрицательный
Теорема 1:
Пусть и в строке матрицы есть хотя бы один отрицательный
Теорема 2:
Пусть и в строке матрицы нет ни одного отрицательного элемента.
Теорема 2:
Пусть и в строке матрицы нет ни одного отрицательного элемента.
Теорема 3:
При переходе от матрицы к матрице целевая функция изменяется в
Теорема 3:
При переходе от матрицы к матрице целевая функция изменяется в
Алгоритм Р-метода
Будем считать, что известна исходная Р- матрица задачи линейного программирования,
Алгоритм Р-метода
Будем считать, что известна исходная Р- матрица задачи линейного программирования,
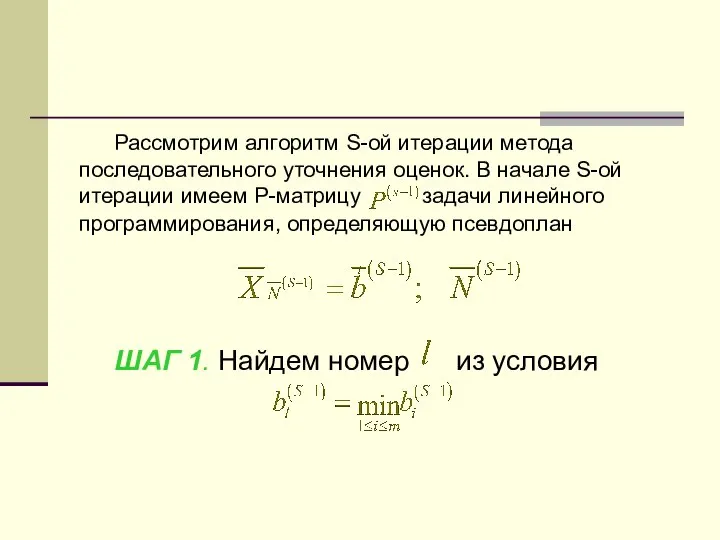
Рассмотрим алгоритм S-ой итерации метода последовательного уточнения оценок. В начале S-ой
Рассмотрим алгоритм S-ой итерации метода последовательного уточнения оценок. В начале S-ой
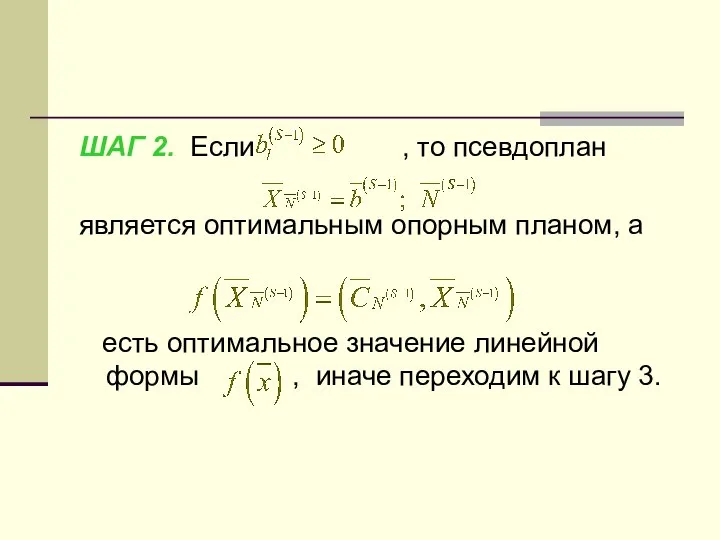
ШАГ 2. Если , то псевдоплан
является оптимальным опорным планом, а
есть
ШАГ 2. Если , то псевдоплан
является оптимальным опорным планом, а
есть
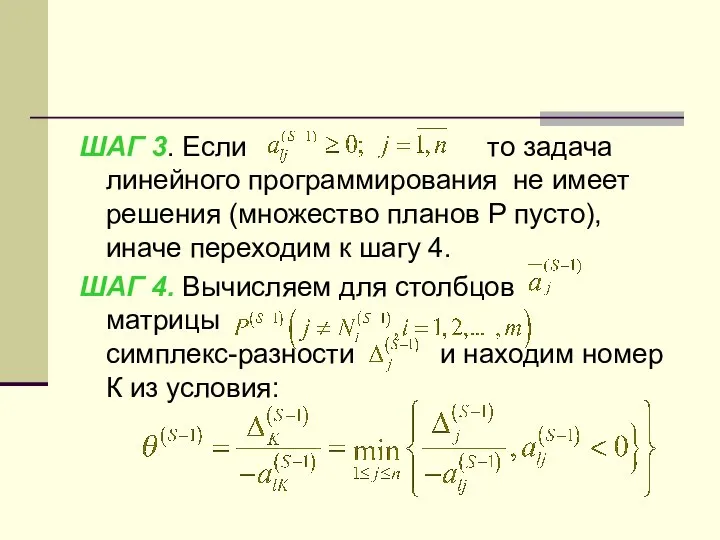
ШАГ 3. Если то задача линейного программирования не имеет решения (множество
ШАГ 3. Если то задача линейного программирования не имеет решения (множество
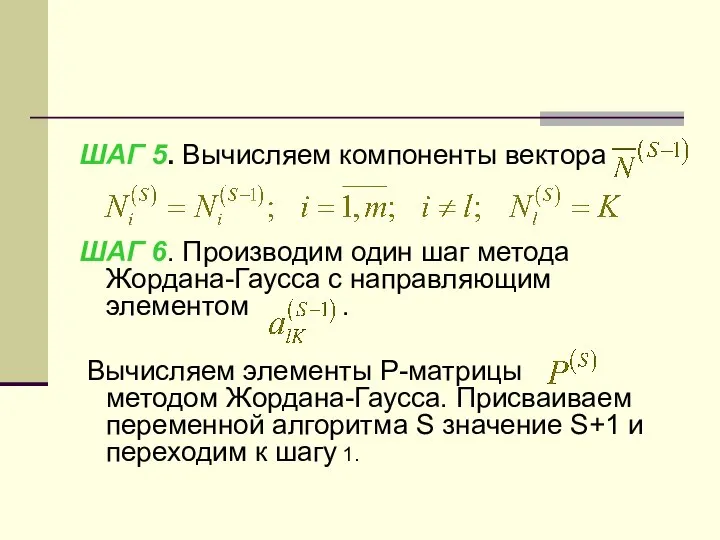
ШАГ 5. Вычисляем компоненты вектора
ШАГ 6. Производим один шаг метода Жордана-Гаусса
ШАГ 6. Производим один шаг метода Жордана-Гаусса
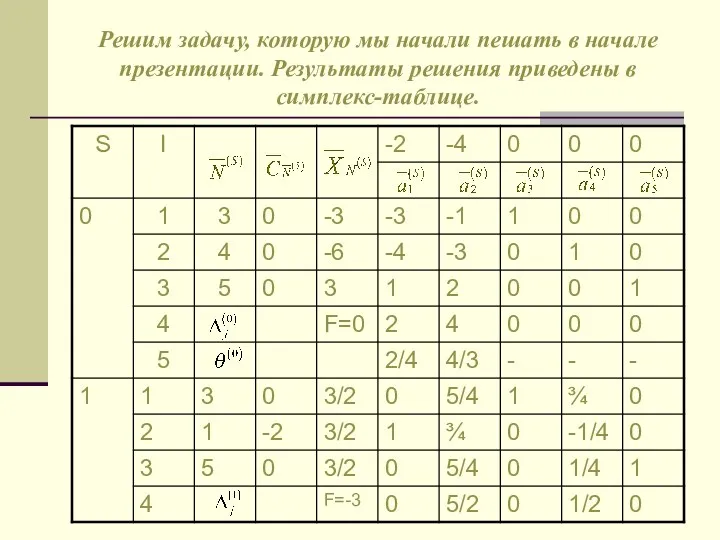
Решим задачу, которую мы начали пешать в начале презентации. Результаты решения
Решим задачу, которую мы начали пешать в начале презентации. Результаты решения
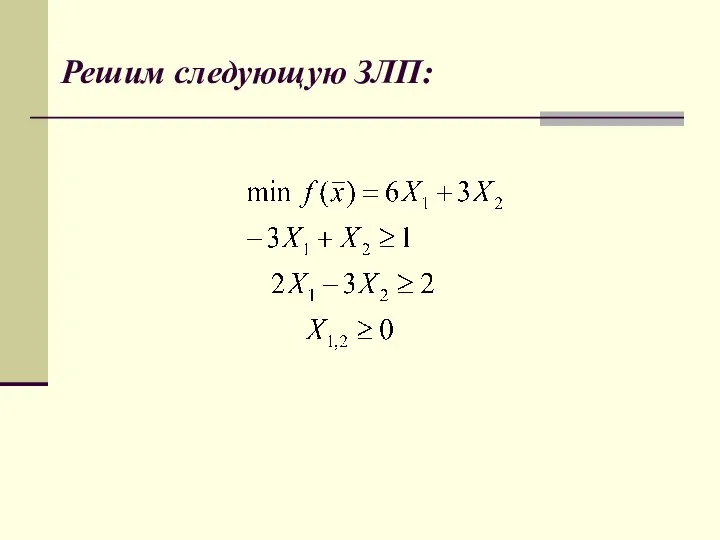
Решим следующую ЗЛП:
Решим следующую ЗЛП:
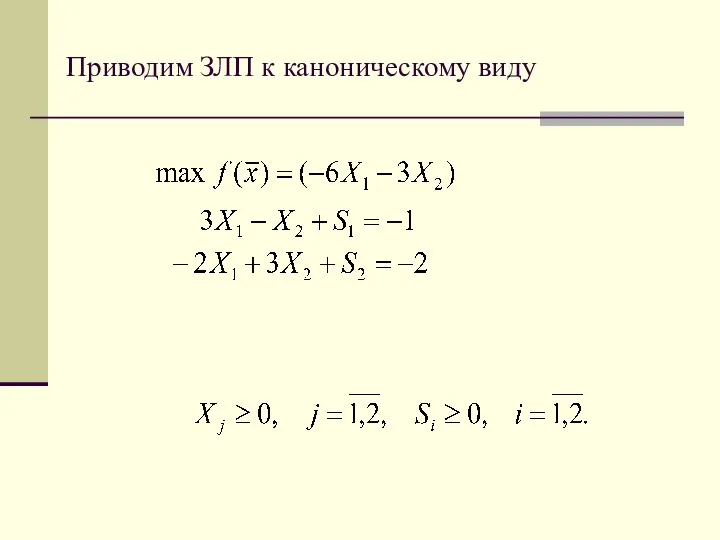
Приводим ЗЛП к каноническому виду
Приводим ЗЛП к каноническому виду
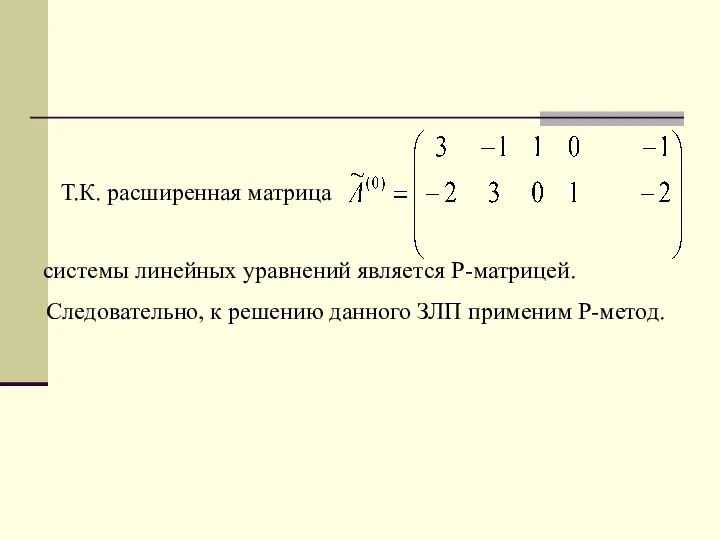
Т.К. расширенная матрица
системы линейных уравнений является Р-матрицей.
Следовательно, к решению данного ЗЛП
Т.К. расширенная матрица
системы линейных уравнений является Р-матрицей.
Следовательно, к решению данного ЗЛП
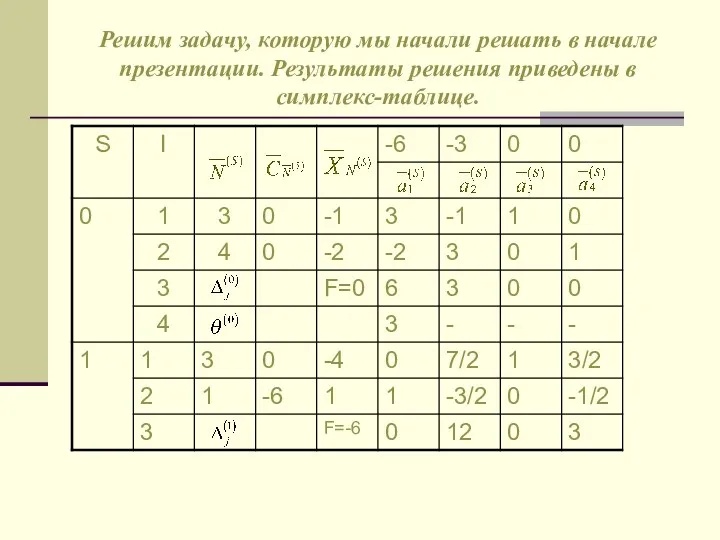
Решим задачу, которую мы начали решать в начале презентации. Результаты решения
Решим задачу, которую мы начали решать в начале презентации. Результаты решения
 Дін ілімінің негіздері. Суннизм
Дін ілімінің негіздері. Суннизм Программного обеспечения
Программного обеспечения Подразделение в структуре ВС РФ
Подразделение в структуре ВС РФ Эпидситуация по столбняку
Эпидситуация по столбняку  Презентация Содержание финансовой политики, ее цели и задачи ФИНАНСЫ
Презентация Содержание финансовой политики, ее цели и задачи ФИНАНСЫ Орын ауыстыруларды анықтау үшін мор әдісі
Орын ауыстыруларды анықтау үшін мор әдісі Действительные числа и преобразования алгебраических выражений - презентация по Алгебре
Действительные числа и преобразования алгебраических выражений - презентация по Алгебре Конный завод «Ахалтекинец»
Конный завод «Ахалтекинец»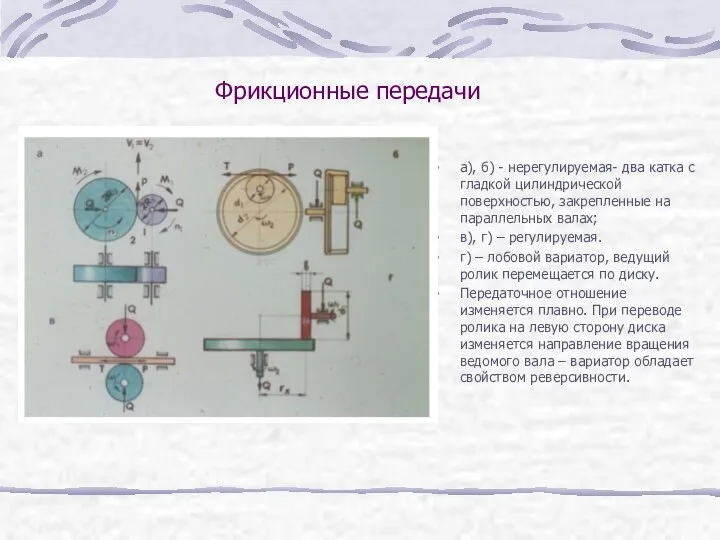 Фрикционные передачи
Фрикционные передачи Старообрядцы. Старообрядческая церковь св. Георгия Победоносца
Старообрядцы. Старообрядческая церковь св. Георгия Победоносца Патофизиология анемий
Патофизиология анемий Памятники Николаю ii
Памятники Николаю ii Правовое регулирование занятости и трудоустройства
Правовое регулирование занятости и трудоустройства Политика и религия
Политика и религия Землетрясения
Землетрясения  Устройства вывода данных
Устройства вывода данных Культура ХХ-ХХІ століття
Культура ХХ-ХХІ століття Политические режимы
Политические режимы The Empire State Building
The Empire State Building Биокомпьютеры
Биокомпьютеры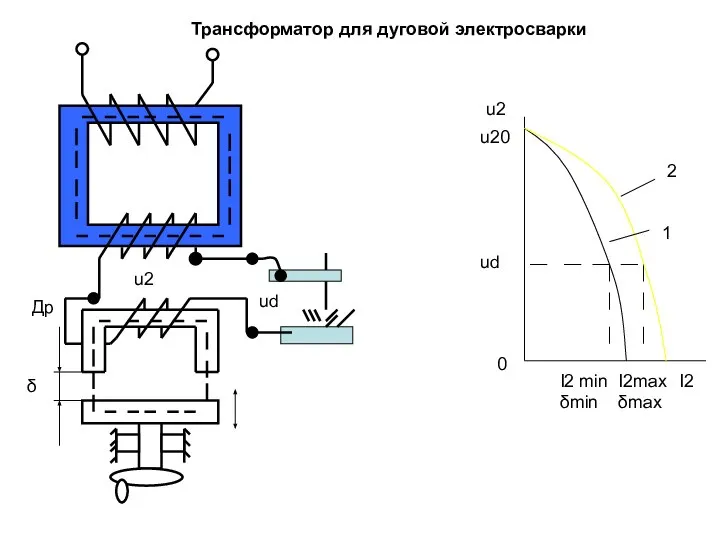 Трансформатор для дуговой электросварки
Трансформатор для дуговой электросварки  Золотые правила презентации Подготовил Какенов Руслан за 15 минут
Золотые правила презентации Подготовил Какенов Руслан за 15 минут Пасха. История и традиции
Пасха. История и традиции Фомин Виталий Васильевич
Фомин Виталий Васильевич Интеграция личного сайта с Facebook Создаем сайты на MyWeb http://myweb.kz/
Интеграция личного сайта с Facebook Создаем сайты на MyWeb http://myweb.kz/ Широкая масленица. Обычаи и обряды
Широкая масленица. Обычаи и обряды «Программа деятельности педагогического коллектива в работе со слабоуспевающими и неуспевающими учащимися» Булатова Л.П. – ди
«Программа деятельности педагогического коллектива в работе со слабоуспевающими и неуспевающими учащимися» Булатова Л.П. – ди Усть-Цильма. Остров русской культуры в Зырянском крае
Усть-Цильма. Остров русской культуры в Зырянском крае