- Электрические машины и микромашины устройств автоматики

Содержание
- 2. ЛИТЕРАТУРА Подлипенский В.С., Петренко В.П. Электромагнитные и электромашинные устройства автоматики. –Киев. –1987. Миловзоров В.П. Электромагнитные устройства
- 3. РАЗДЕЛ 2 ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ. Лекция 8 ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА. 8.1 Общие
- 4. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА 8.1 Общие
- 5. Устройство машины постоянного тока
- 6. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА Основные элементы
- 7. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА Принцип действия
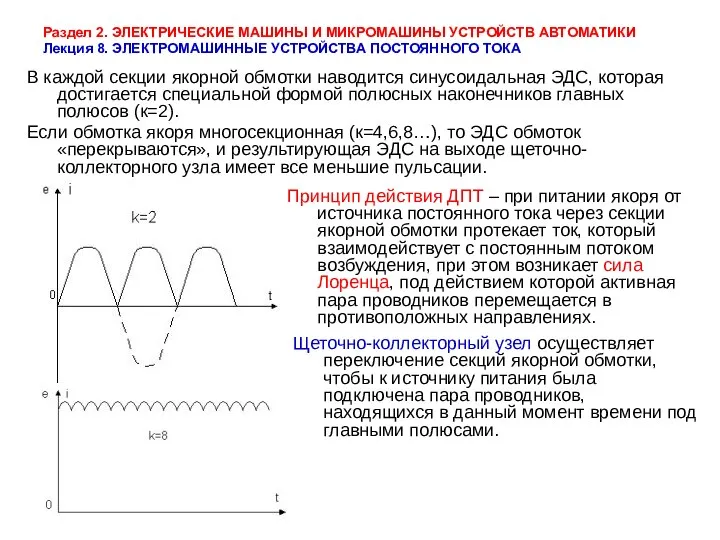
- 8. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА В каждой
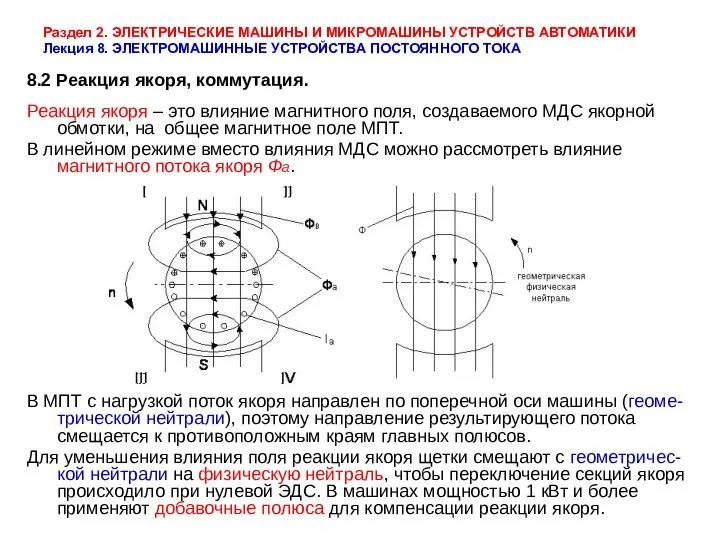
- 9. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА Реакция якоря
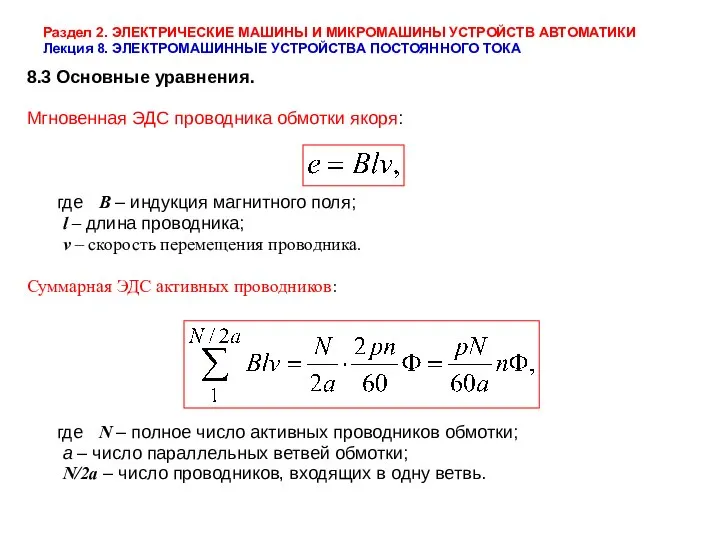
- 10. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА 8.3 Основные
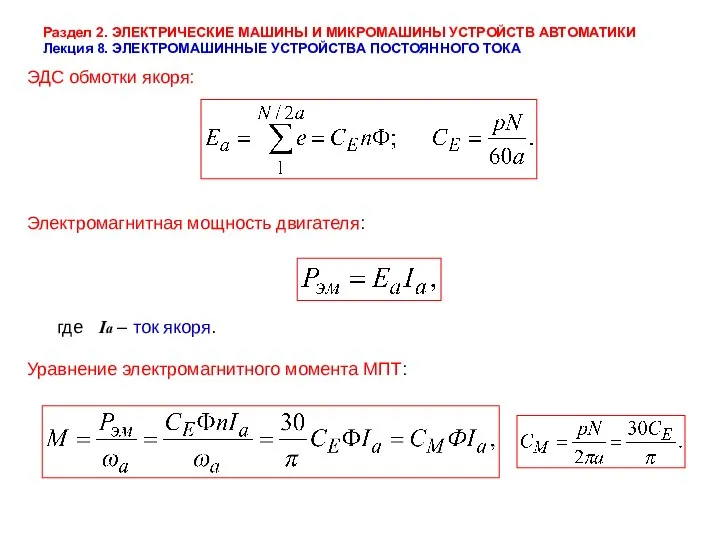
- 11. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА ЭДС обмотки
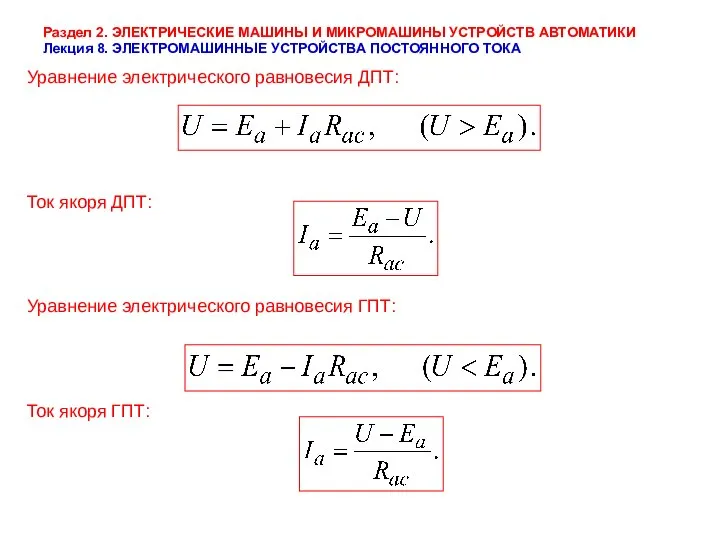
- 12. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА Уравнение электрического
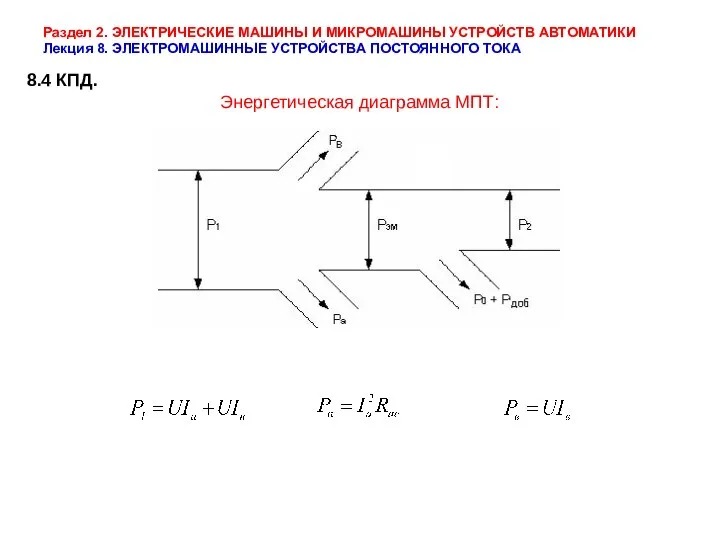
- 13. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА 8.4 КПД.
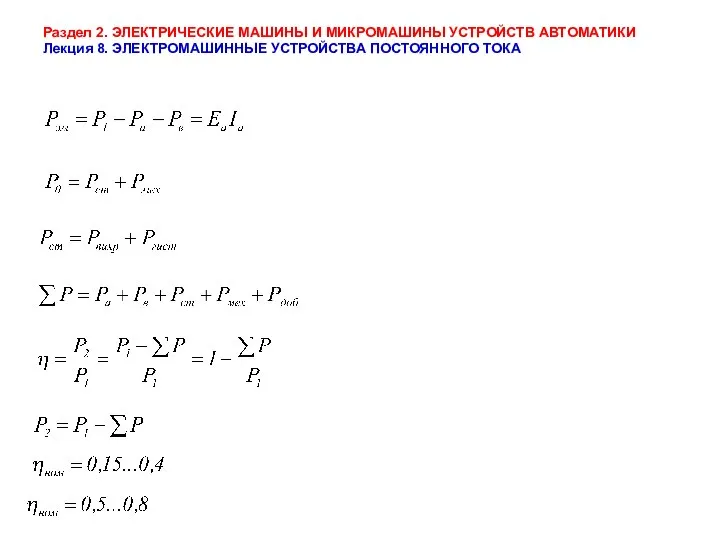
- 14. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА
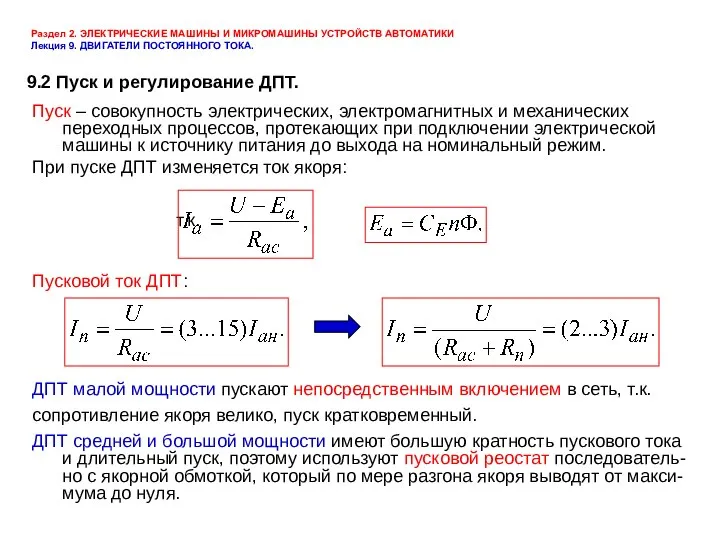
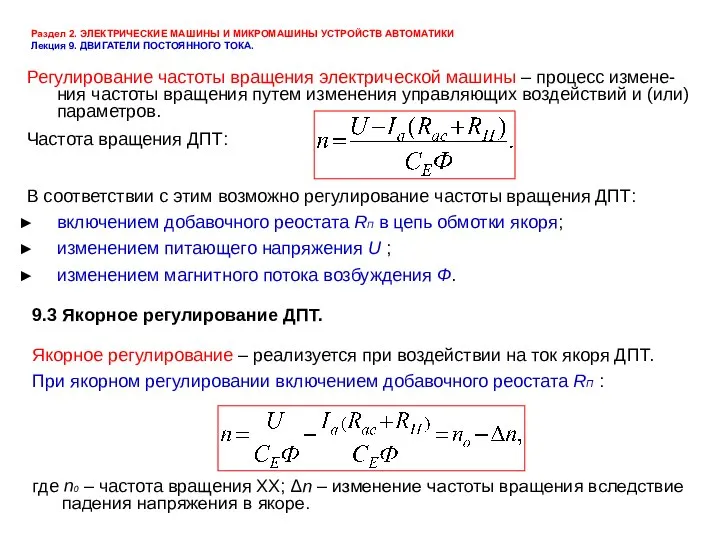
- 15. Лекция 9 ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. 9.1 Способы возбуждения ДПТ. 9.2 Пуск и регулирование ДПТ. 9.3 Якорное
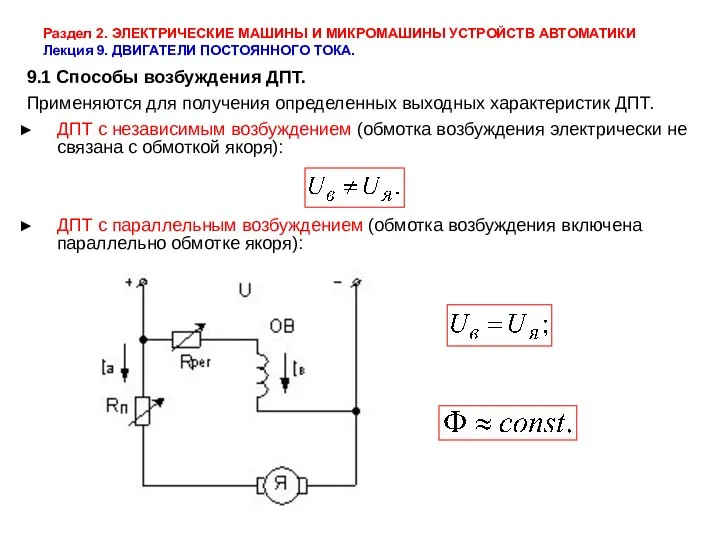
- 16. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. 9.1 Способы возбуждения
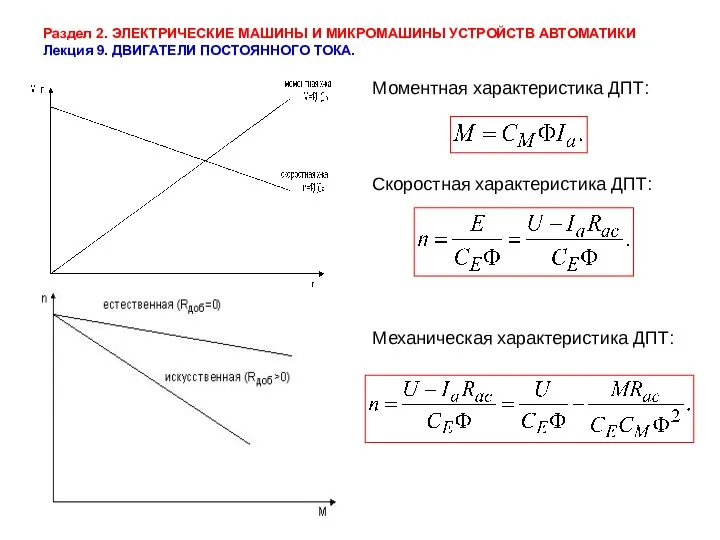
- 17. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. Моментная характеристика ДПТ:
- 18. ДПТ с последовательным возбуждением (обмотка возбуждения включена последовательно с обмоткой якоря): Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И
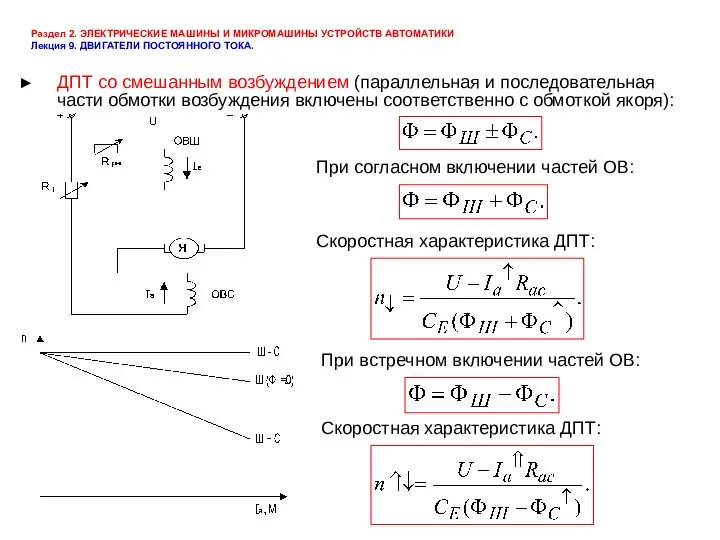
- 19. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. ДПТ со смешанным
- 20. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. 9.2 Пуск и
- 21. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. Регулирование частоты вращения
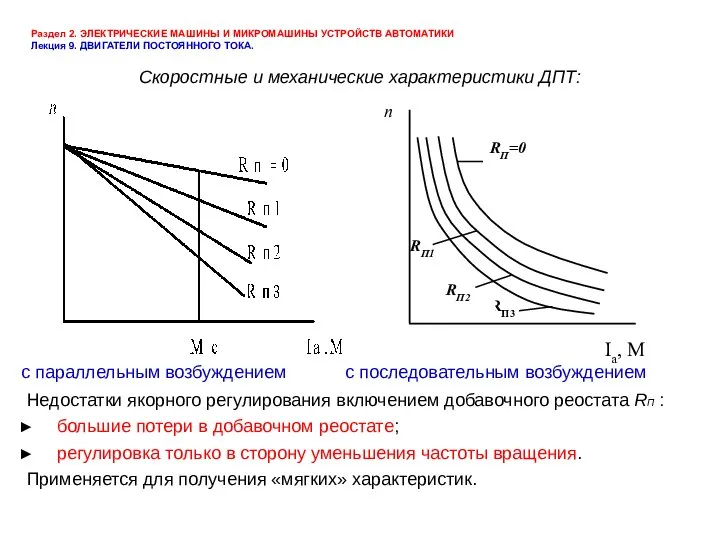
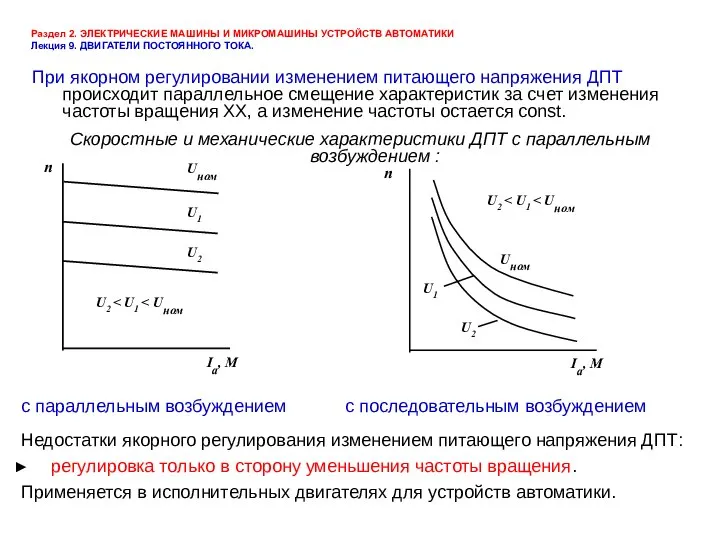
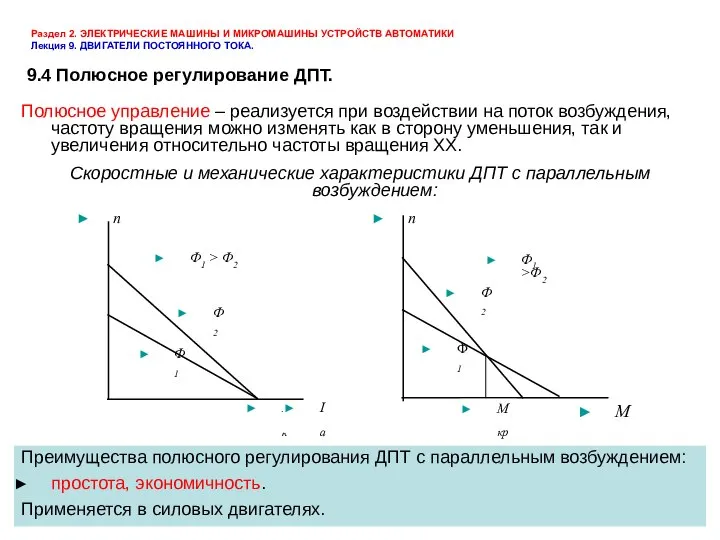
- 22. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. с параллельным возбуждением
- 23. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. с параллельным возбуждением
- 24. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. Скоростные и механические
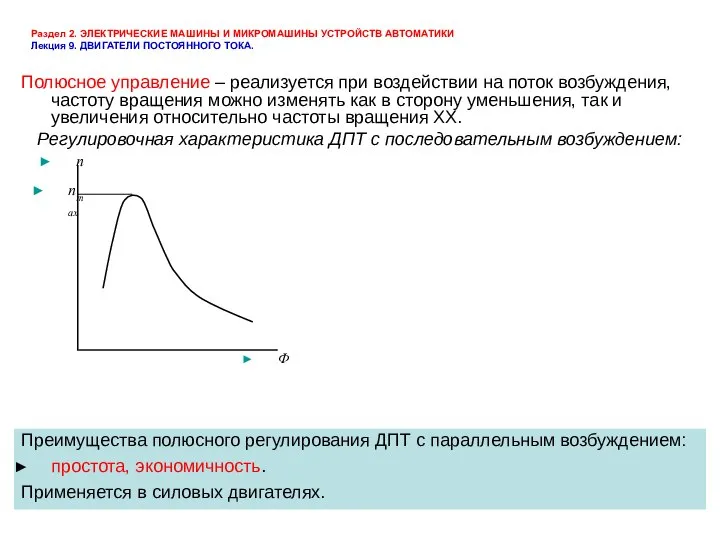
- 25. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. Регулировочная характеристика ДПТ
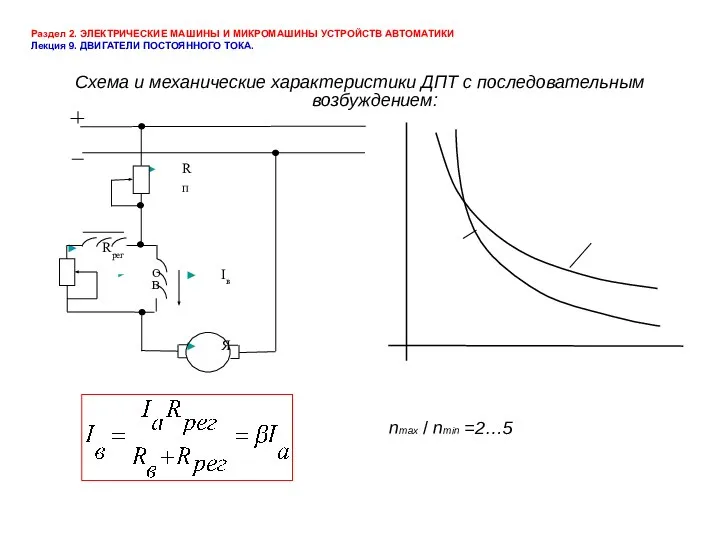
- 26. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. Схема и механические
- 27. Лекция 10 ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение). 10.1 Микродвигатели постоянного тока. 10.2 Универсальные коллекторные двигатели. 10.3 Исполнительные
- 28. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение). 10.1 Микродвигатели
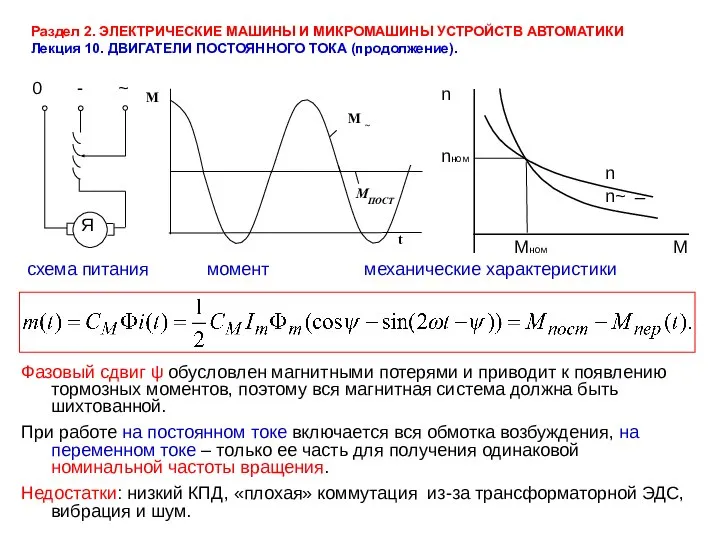
- 29. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение). Фазовый сдвиг
- 30. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение). 10.3 Исполнительные
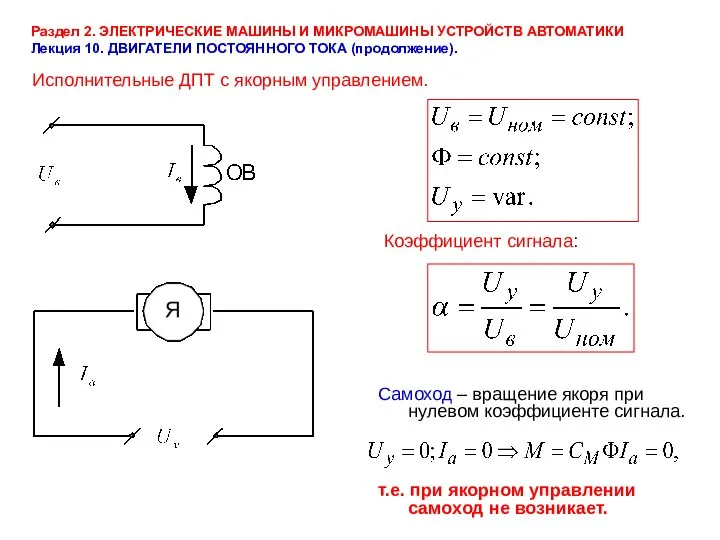
- 31. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение). Исполнительные ДПТ
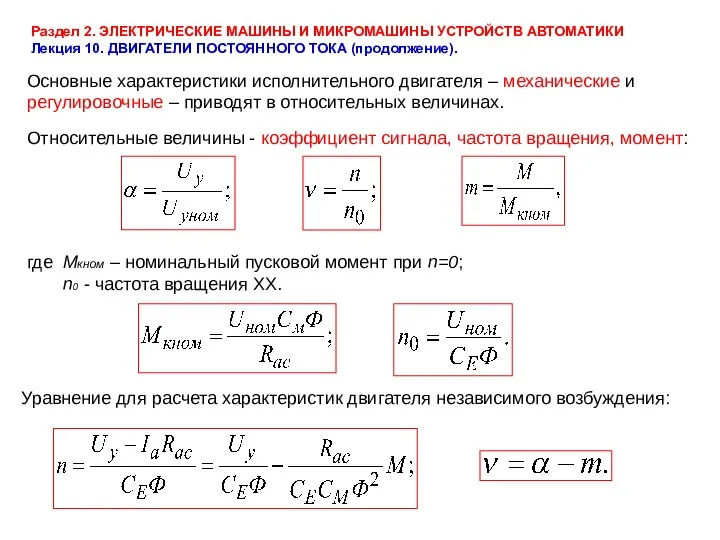
- 32. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение). Основные характеристики
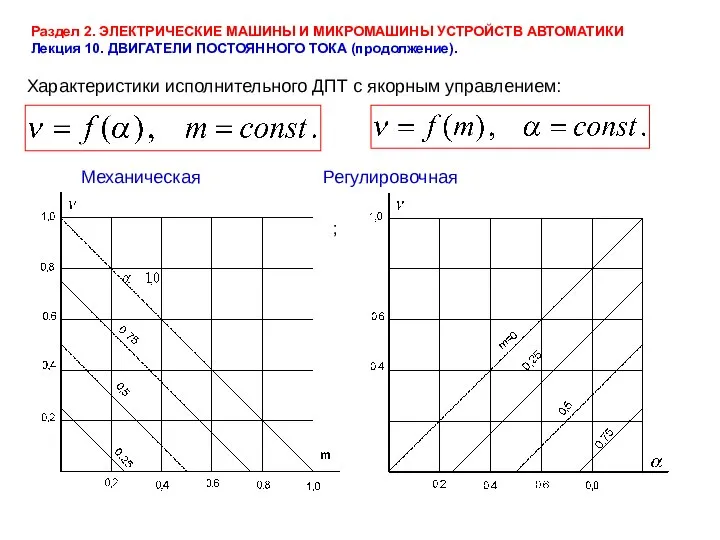
- 33. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение). Характеристики исполнительного
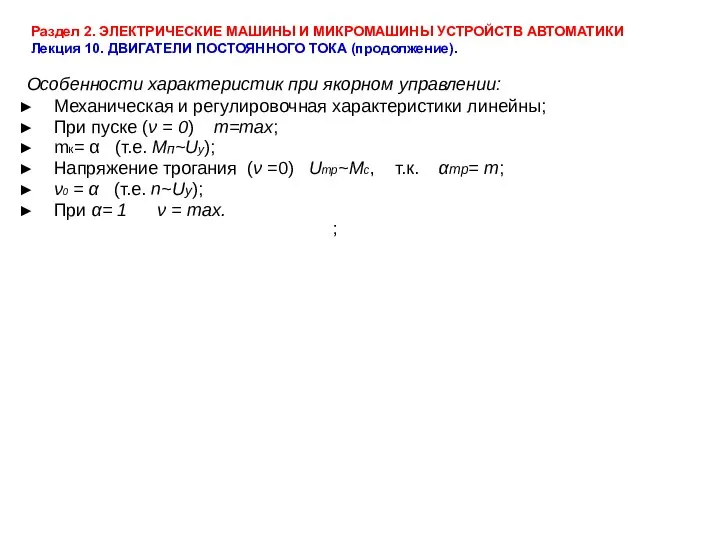
- 34. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение). Особенности характеристик
- 35. Лекция 11 ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. 11.1 Общие сведения. 11.2 Магнитное поле машины переменного тока. 11.3
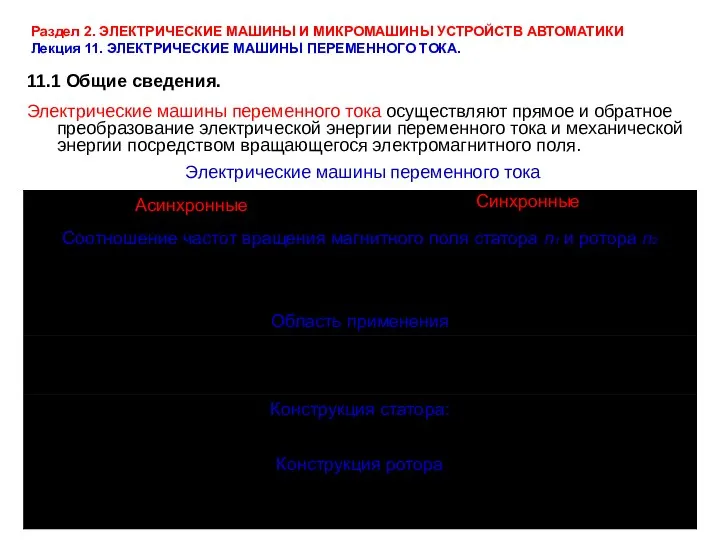
- 36. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. 11.1 Общие
- 37. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. ; Основные
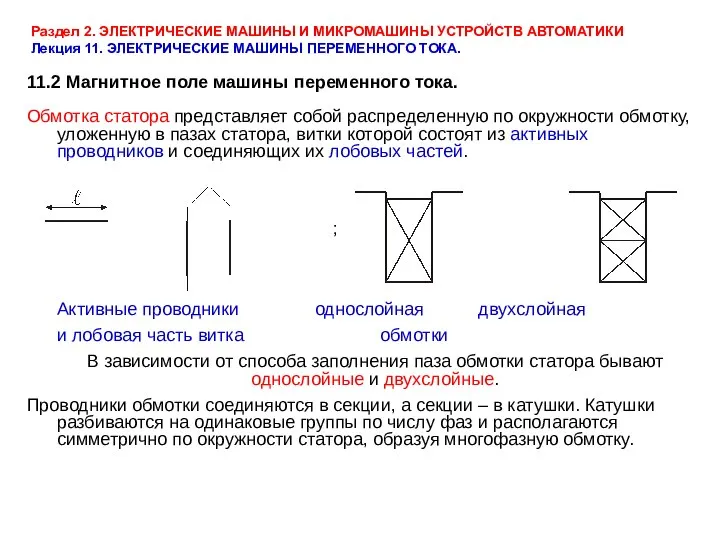
- 38. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. ; 11.2
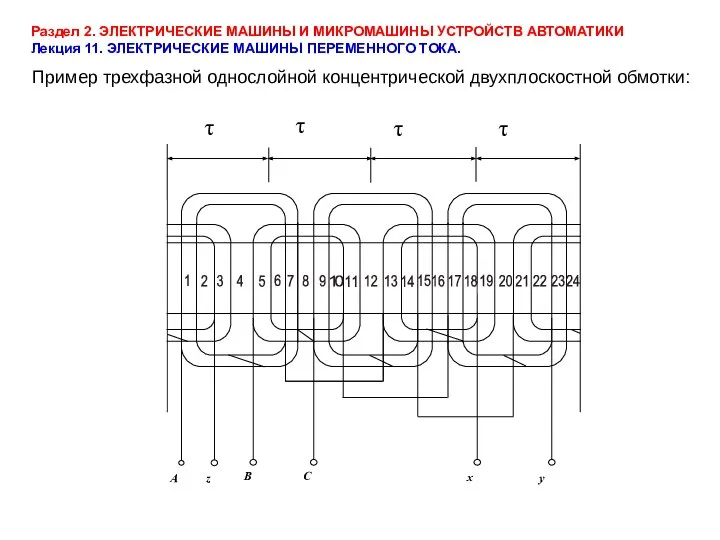
- 39. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. ; Пример
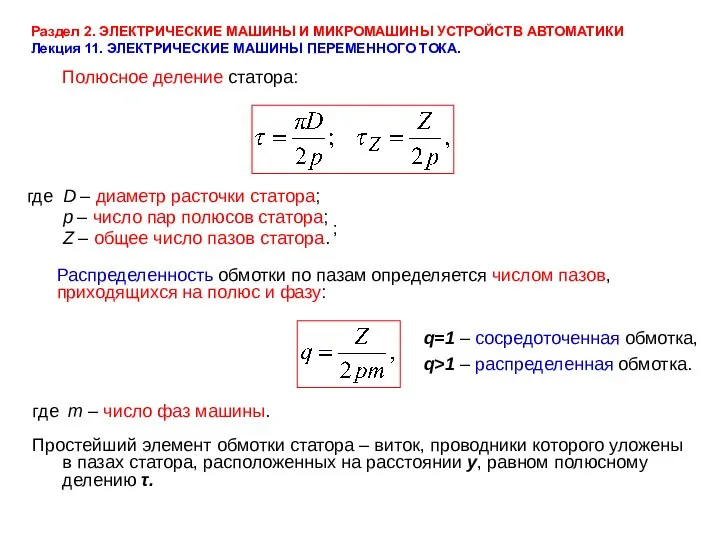
- 40. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. ; Полюсное
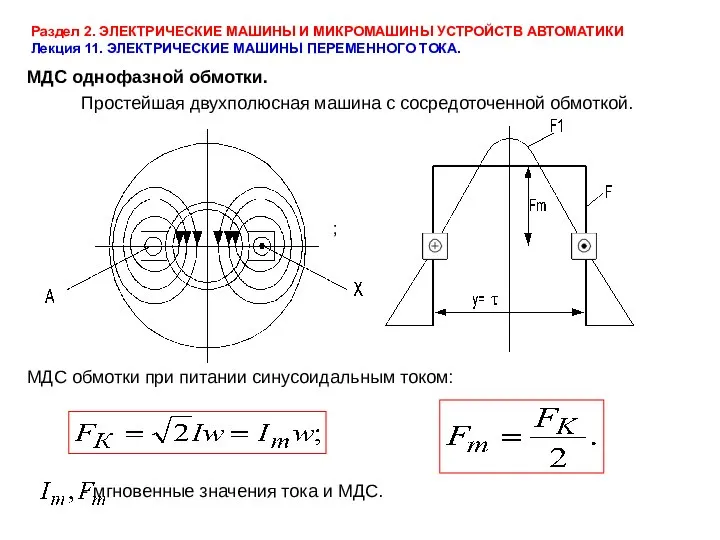
- 41. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. ; МДС
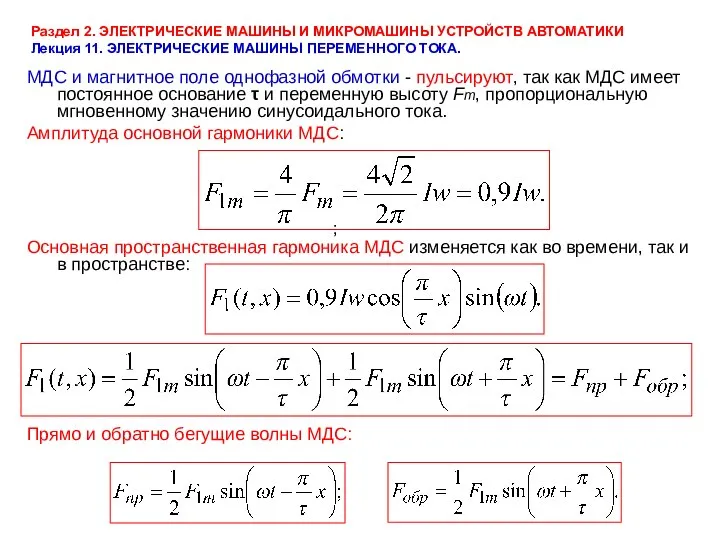
- 42. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. ; МДС
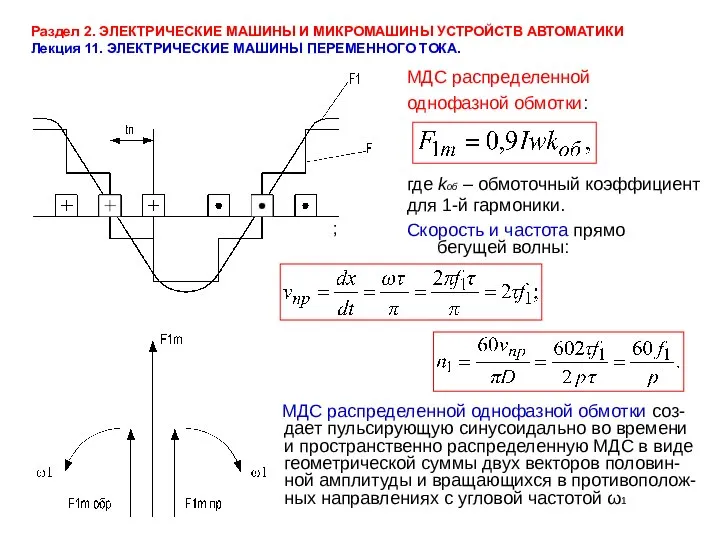
- 43. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. ; МДС
- 44. Лекция 12 АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ. 12.1 Основные уравнения, схема замещения АД. 12.2 Энергетическая диаграмма и
- 45. Лекция 13 АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2). 13.1 Конструкции АД. 13.2 Пуск и устойчивость работы
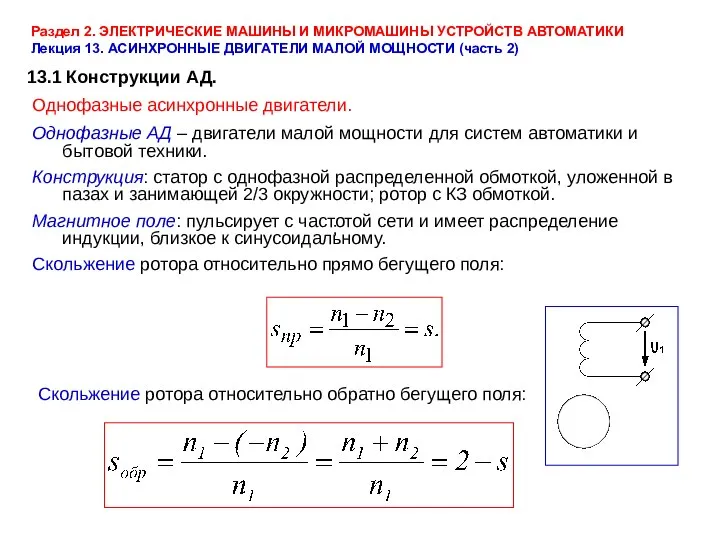
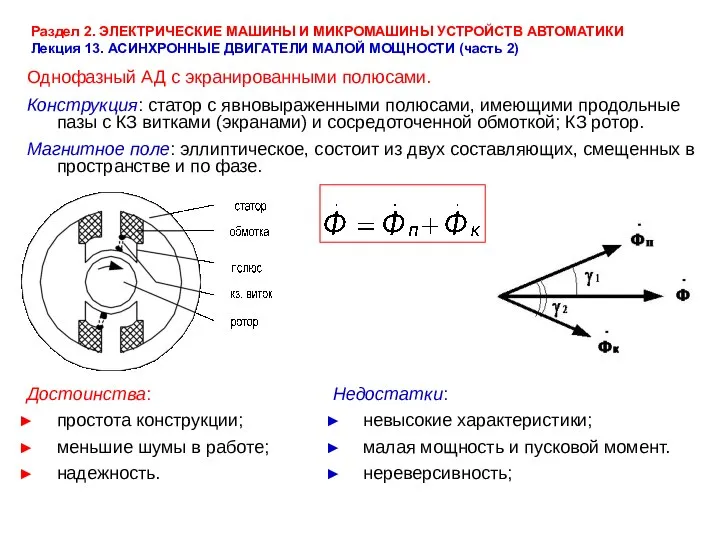
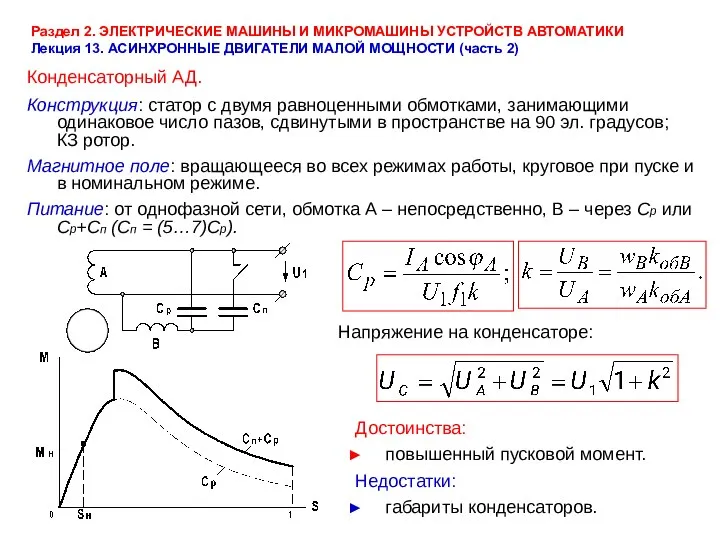
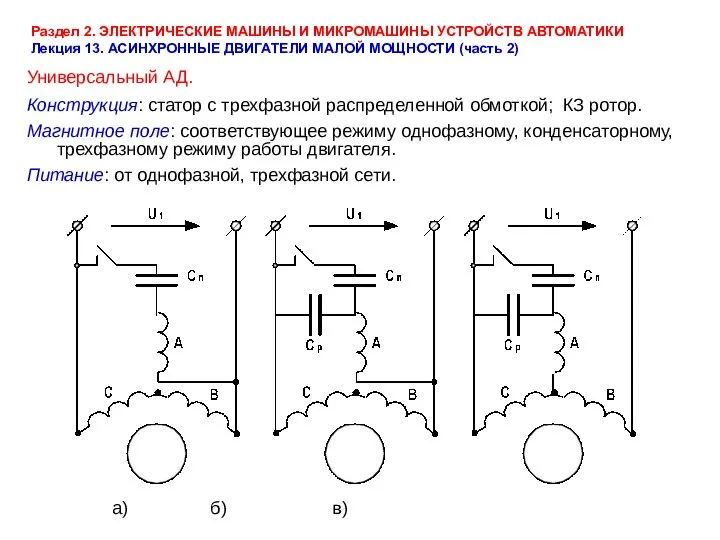
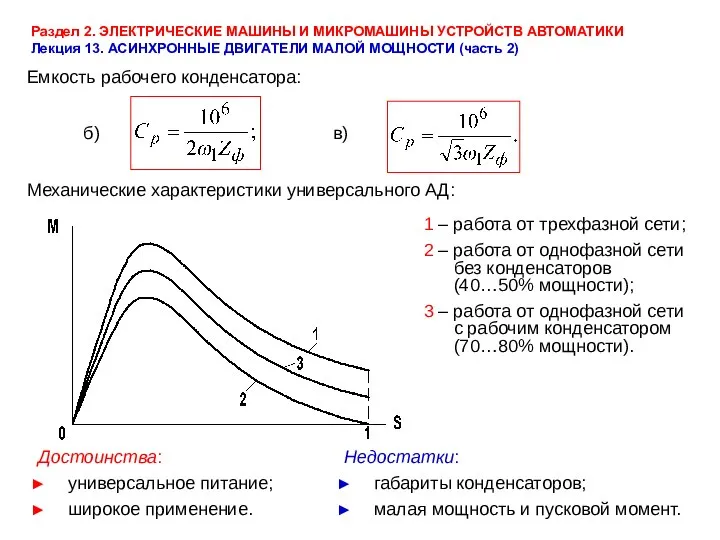
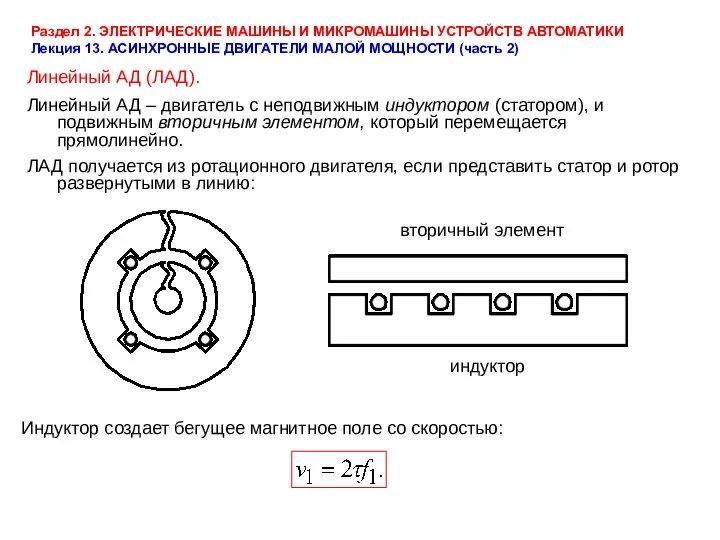
- 46. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
- 47. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
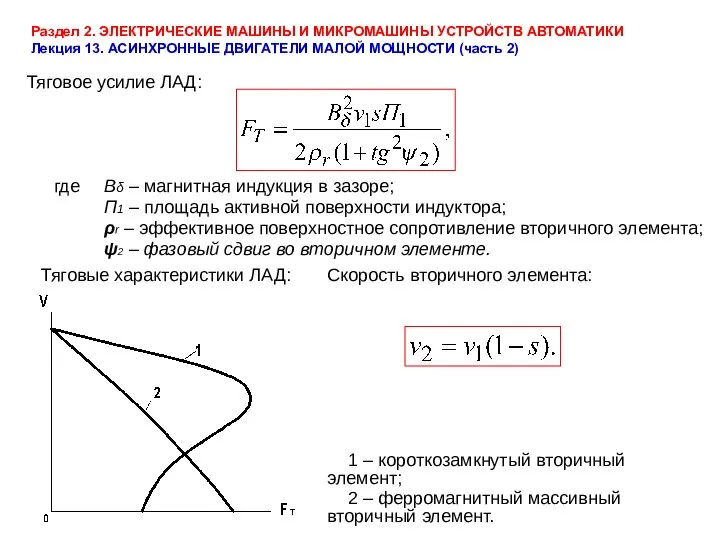
- 48. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
- 49. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
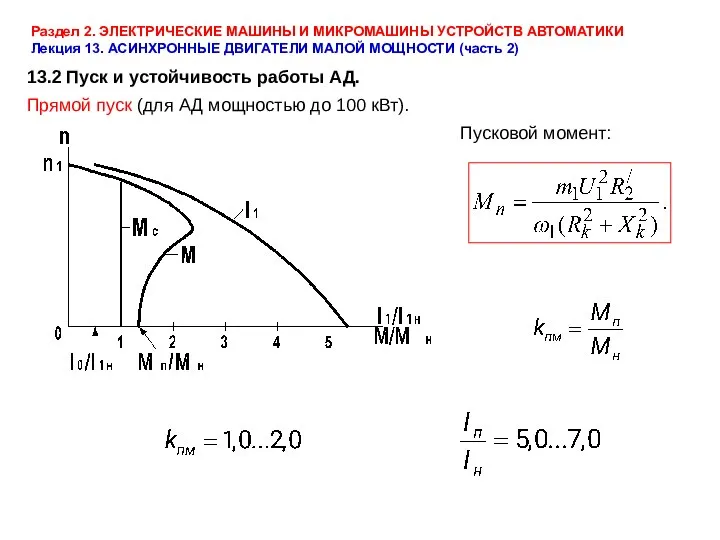
- 50. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
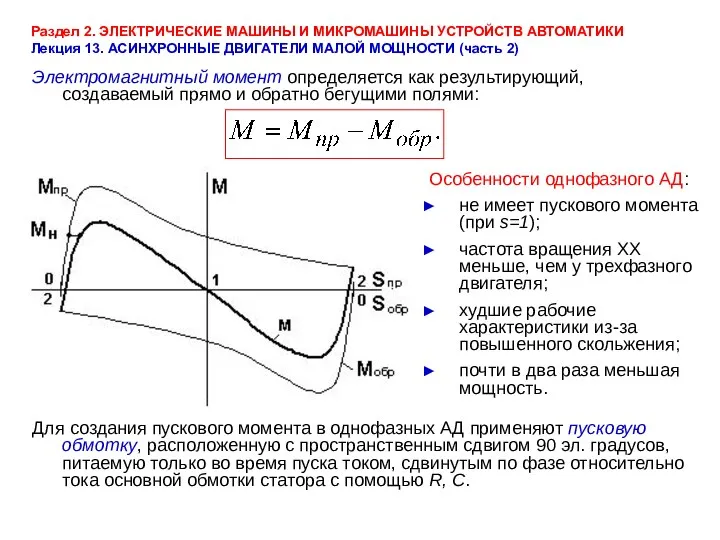
- 51. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
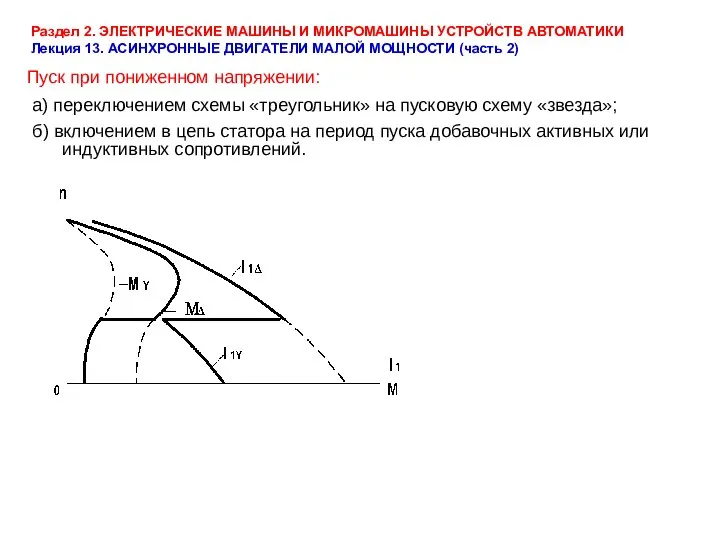
- 52. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
- 53. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
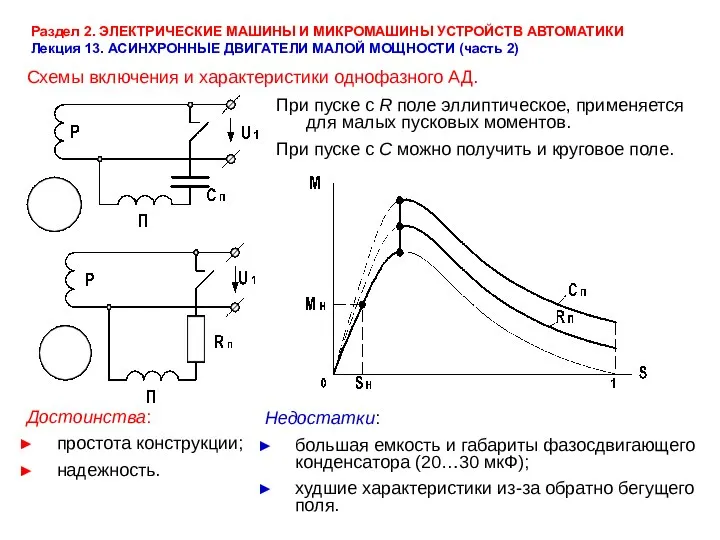
- 54. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
- 55. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
- 56. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
- 57. Лекция 14 ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА. АСИНХРОННЫЕ ТАХОГЕНЕРАТОРЫ. 14.1 Общие сведения и конструкция. 14.2 Способы регулирования.
- 58. Лекция 15 СЕЛЬСИНЫ. 15.1 Общие сведения и конструкция. 15.2 Индикаторный режим сельсинов. 14.3 Трансформаторный режим сельсинов.
- 59. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 15. СЕЛЬСИНЫ 15.1 Общие сведения и конструкция.
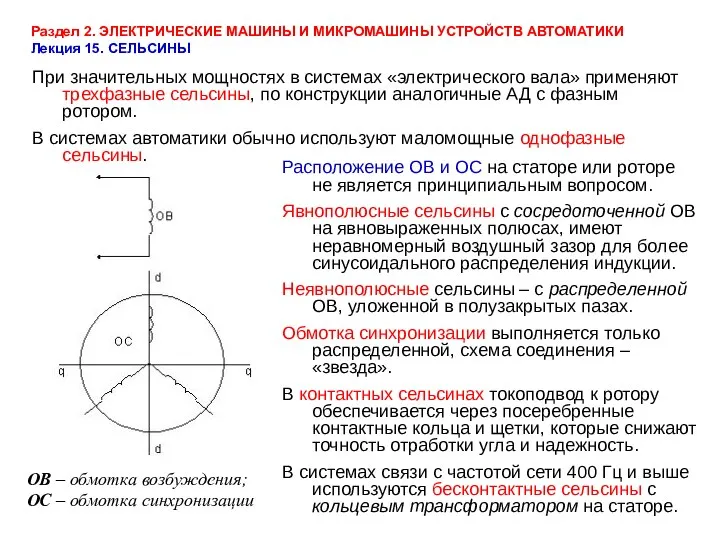
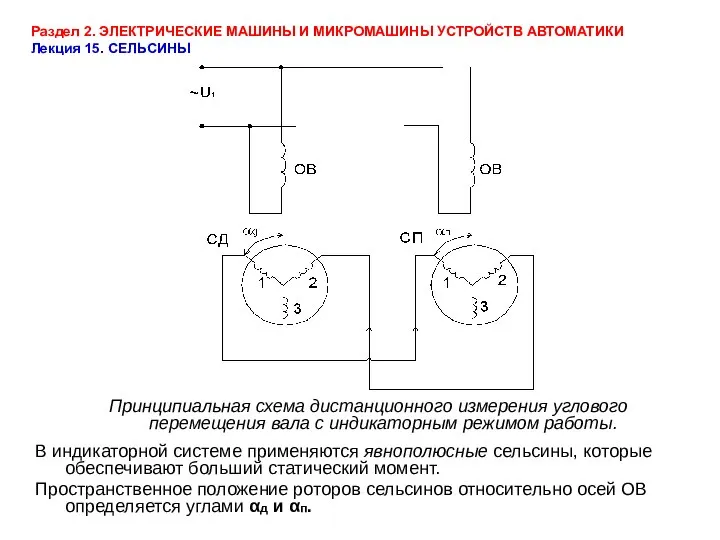
- 60. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 15. СЕЛЬСИНЫ При значительных мощностях в системах
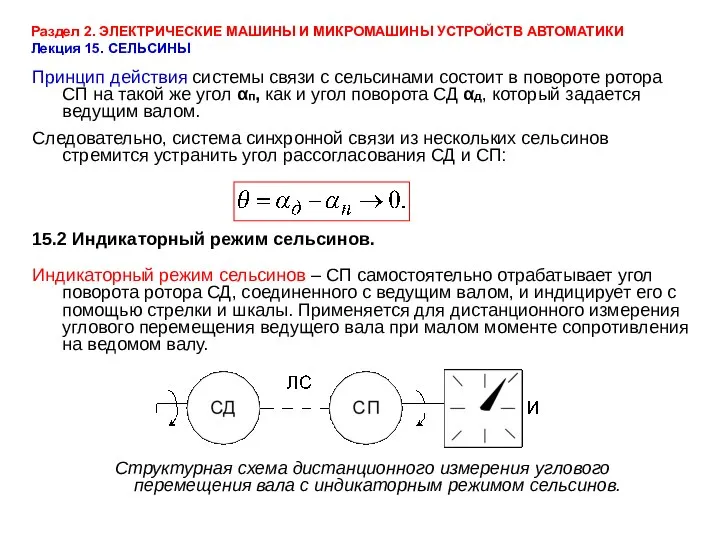
- 61. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 15. СЕЛЬСИНЫ Принцип действия системы связи с
- 62. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 15. СЕЛЬСИНЫ Принципиальная схема дистанционного измерения углового
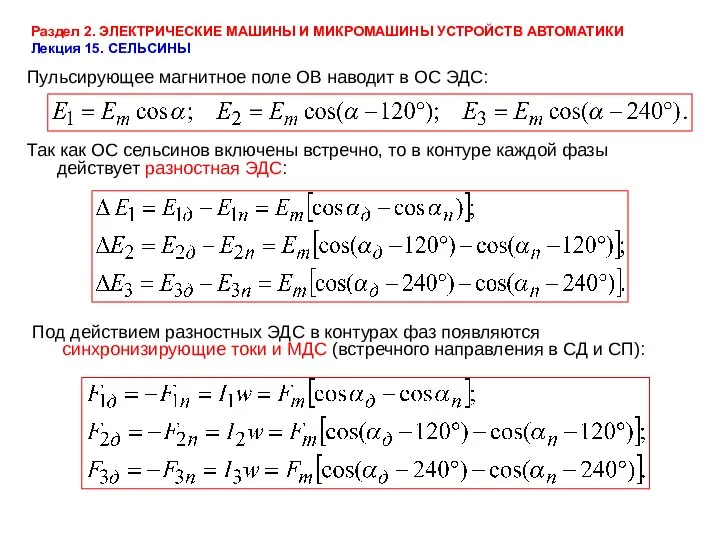
- 63. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 15. СЕЛЬСИНЫ Пульсирующее магнитное поле ОВ наводит
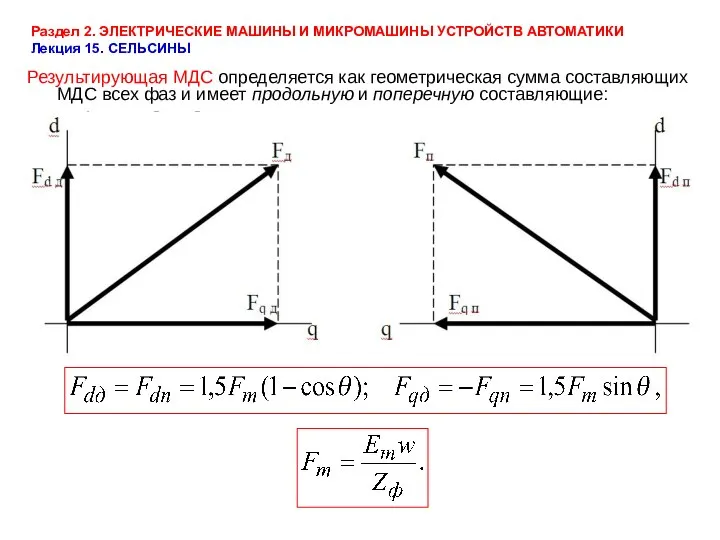
- 64. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 15. СЕЛЬСИНЫ Результирующая МДС определяется как геометрическая
- 65. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 15. СЕЛЬСИНЫ Взаимодействие потока, создаваемого поперечной составляющей
- 67. Скачать презентацию
ЛИТЕРАТУРА
Подлипенский В.С., Петренко В.П. Электромагнитные и электромашинные устройства автоматики. –Киев. –1987.
Миловзоров
ЛИТЕРАТУРА
Подлипенский В.С., Петренко В.П. Электромагнитные и электромашинные устройства автоматики. –Киев. –1987.
Миловзоров
РАЗДЕЛ 2
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ
УСТРОЙСТВ АВТОМАТИКИ.
Лекция 8
ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА.
8.1
РАЗДЕЛ 2
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ
УСТРОЙСТВ АВТОМАТИКИ.
Лекция 8
ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА.
8.1
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
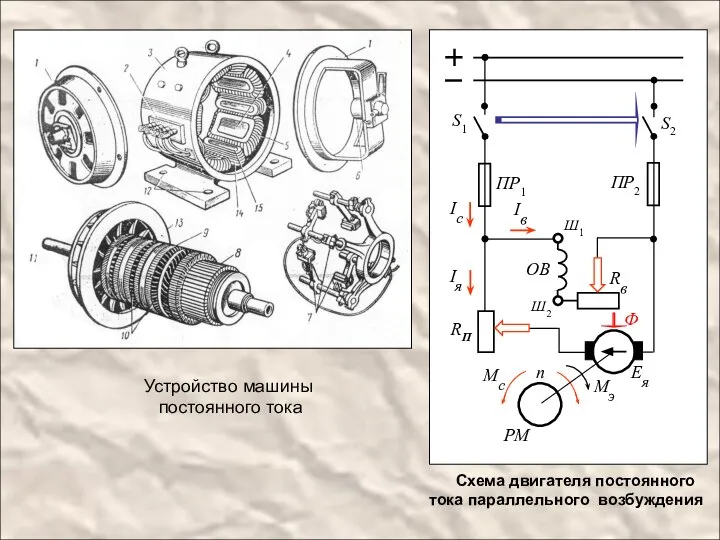
Устройство машины
постоянного тока
Устройство машины
постоянного тока

Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА

Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Лекция 9
ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА.
9.1 Способы возбуждения ДПТ.
9.2 Пуск и регулирование
Лекция 9
ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА.
9.1 Способы возбуждения ДПТ.
9.2 Пуск и регулирование
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
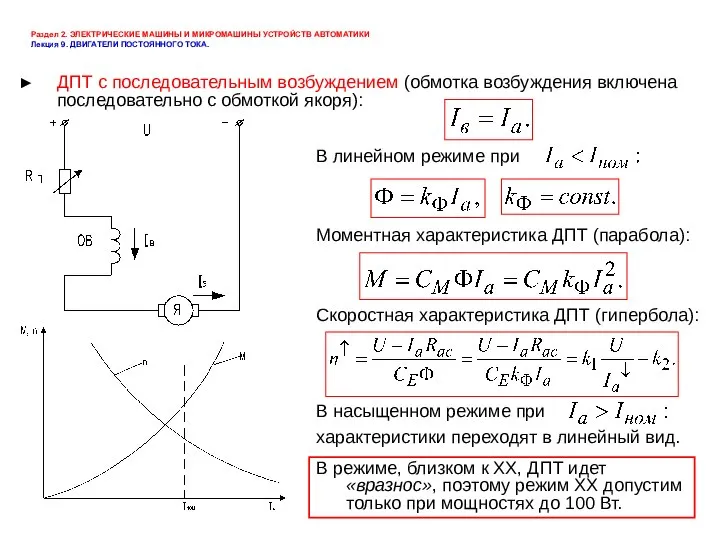
ДПТ с последовательным возбуждением (обмотка возбуждения включена последовательно с обмоткой якоря):
Раздел
ДПТ с последовательным возбуждением (обмотка возбуждения включена последовательно с обмоткой якоря):
Раздел
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Лекция 10
ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
(продолжение).
10.1 Микродвигатели постоянного тока.
10.2 Универсальные коллекторные
Лекция 10
ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
(продолжение).
10.1 Микродвигатели постоянного тока.
10.2 Универсальные коллекторные
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Лекция 11
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА.
11.1 Общие сведения.
11.2 Магнитное поле машины
Лекция 11
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА.
11.1 Общие сведения.
11.2 Магнитное поле машины
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ

Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Лекция 12
АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ.
12.1 Основные уравнения, схема замещения АД.
12.2
Лекция 12
АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ.
12.1 Основные уравнения, схема замещения АД.
12.2
Лекция 13
АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2).
13.1 Конструкции АД.
13.2 Пуск
Лекция 13
АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2).
13.1 Конструкции АД.
13.2 Пуск
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Лекция 14
ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА.
АСИНХРОННЫЕ ТАХОГЕНЕРАТОРЫ.
14.1 Общие сведения и конструкция.
14.2
Лекция 14
ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА.
АСИНХРОННЫЕ ТАХОГЕНЕРАТОРЫ.
14.1 Общие сведения и конструкция.
14.2
Лекция 15
СЕЛЬСИНЫ.
15.1 Общие сведения и конструкция.
15.2 Индикаторный режим сельсинов.
14.3 Трансформаторный
Лекция 15
СЕЛЬСИНЫ.
15.1 Общие сведения и конструкция.
15.2 Индикаторный режим сельсинов.
14.3 Трансформаторный

Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
15.1 Общие
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
15.1 Общие
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
При значительных
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
При значительных
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Принцип действия
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Принцип действия
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Принципиальная схема
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Принципиальная схема
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Пульсирующее магнитное
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Пульсирующее магнитное
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Результирующая МДС
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Результирующая МДС
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Взаимодействие потока,
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Взаимодействие потока,
 Циклотрон
Циклотрон  VIII Aula de português
VIII Aula de português Создание Арабского халифа
Создание Арабского халифа Генеральный план завода
Генеральный план завода Гоночный трек "Долина скорости"
Гоночный трек "Долина скорости" Организационные структуры управления проектами
Организационные структуры управления проектами  Структурні елементи науки
Структурні елементи науки Поверхности. Образование и задание на чертеже
Поверхности. Образование и задание на чертеже Приемы технологии развития критического мышления на уроках русского языка и литературы Гиннэ Светлана Анатольевна, учитель II кв
Приемы технологии развития критического мышления на уроках русского языка и литературы Гиннэ Светлана Анатольевна, учитель II кв «Аллея памяти» увековечение памяти фронтовиков-новооскольцев, вернувшихся с полей сражений
«Аллея памяти» увековечение памяти фронтовиков-новооскольцев, вернувшихся с полей сражений Презентация Международное право учебная литература
Презентация Международное право учебная литература  Эрмитаж. Культура древнего Египта
Эрмитаж. Культура древнего Египта Этапы подготовки федерального бюджета в Российской Федерации. Роль Совета Федерации
Этапы подготовки федерального бюджета в Российской Федерации. Роль Совета Федерации Лекция 10. Международные и региональные валютно-кредитные
Лекция 10. Международные и региональные валютно-кредитные  Постреляционные, объектные модели данных. Технологии интеграции распределенных данных на основе XML
Постреляционные, объектные модели данных. Технологии интеграции распределенных данных на основе XML чтение - презентация для начальной школы
чтение - презентация для начальной школы Презентация Рынок мяса в России
Презентация Рынок мяса в России  СЛС. Снабжение. Логистика. Строительство
СЛС. Снабжение. Логистика. Строительство Ауыз әдебиеті
Ауыз әдебиеті  УРОВНИ ОРГАНИЗАЦИИ ЖИЗНИ
УРОВНИ ОРГАНИЗАЦИИ ЖИЗНИ УРОК ЛИТЕРАТУРНОГО ЧТЕНИЯ ПО ПРОГРАММЕ «ШКОЛА 2100» 2 класс А. Толстой «Золотой ключик, или приключения Буратино»
УРОК ЛИТЕРАТУРНОГО ЧТЕНИЯ ПО ПРОГРАММЕ «ШКОЛА 2100» 2 класс А. Толстой «Золотой ключик, или приключения Буратино» Основные понятия о зданиях и организации работ в строительстве
Основные понятия о зданиях и организации работ в строительстве Странный ребёнок ребёнок –чудак дети-загадка «дети дождя»
Странный ребёнок ребёнок –чудак дети-загадка «дети дождя» Христианская апологетика и история
Христианская апологетика и история О чем говорят гербы
О чем говорят гербы Тоталитаризм. Отрицательные черты
Тоталитаризм. Отрицательные черты ПЕРЕД ЗАКОНОМ ВСЕ РАВНЫ!
ПЕРЕД ЗАКОНОМ ВСЕ РАВНЫ! Презентация Стандартизация
Презентация Стандартизация