- Электроприводы с двигателями постоянного тока

Содержание
- 2. ЭЛЕКТРОПРИВОДЫ С ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА ДПТНВ. Схема включения. Общепромышленная серии 2П в диапазоне мощностей от 0,13
- 3. Основные соотношения Обмотка якоря Добавочные полюса Компенсационная обмотка Щеточный контакт ω = U/kФ – IR/kФ ω
- 4. Статические характеристики ω = U/kФ – IR/kФ ω = U/kФ – MR/kФ Их характерными точками являются
- 5. Основные способы реализации искусственных характеристик ДПТНВ для регулирования координат ЭП: изменение сопротивления добавочного резистора в цепи
- 6. Энергетические режимы работы ДПТНВ Энергетический режим работы различают исходя из взаимных направлений двух переменных - электрических
- 7. Режим холостого хода I = 0, Ε=U=κ Φ ω, Μ=0, ω = ω0 Холостой ход Двигатель
- 8. Двигательный режим Ε Диапазон двигательного режима ω и М совпадают по направлению. В этом режиме Е
- 9. Генераторный режим Ε>U, ω > ω0 Генераторный режим Генераторный режим работы параллельно с сетью или торможение
- 10. Режим короткого замыкания Ε=0, ω = 0, Ι = Ιкз = U/R Режим короткого замыкания Режим
- 11. Торможение противовключением Режим торможения противовключением ω Режим генератора при его последовательном соединении с сетью или торможение
- 12. Динамическое торможение Режим автономного генератора или динамическое торможение возникает при включении двигателя по данной схеме. В
- 13. Основные показатели регулирования электроприводов 1. Диапазон регулирования угловой скорости. Обычно диапазон регулирования выражается в числах в
- 14. При работе двигателя на разных угловых скоростях следует подсчитывать так называемый средневзвешенный КПД за регулировочный цикл,
- 15. 4. Стабильность угловой скорости характеризуется изменением угловой скорости при заданном отклонении момента нагрузки и зависит от
- 16. 5. Направление регулирования скорости, т. е. уменьшение или увеличение ее по отношению к основной скорости, зависит
- 17. Регулирование скорости ДПТНВ с помощью резисторов в цепи якоря ω = U/kФ – IR/kФ Диапазон регулирования
- 18. Мощность потребляемая из сети Полезная мощность на валу Относительный перепад скорости
- 19. Расчет регулировочных сопротивлений в цепи якоря RД = ? Метод пропорций -
- 20. Метод отрезков
- 21. Регулирование тока и момента при пуске, торможении и реверсе ДПТНВ Пуск (характеристики 1, 2) Динамическое торможение
- 22. Порядок построения пусковых диаграмм
- 23. Динамическое торможение и торможение противовключением Сопротивление добавочного резистора в одну ступень Сопротивление добавочного резистора при динамическом
- 24. Регулирование скорости ДВПТНВ изменением магнитного потока Регулирование тока в цепи возбуждения может осуществляться или с помощью
- 25. Уменьшение магнитного потока приводи к увеличению скорости идеального холостого хода ω0. Ток короткого замыкания Iк.з.= U/Rя,
- 26. ω = U/kФ – IR/kФ
- 27. Как видно из приведенных выше соотношений, при работе двигателя на искусственных характеристиках он может быть нагружен
- 28. Регулирование координат в системе ДПТНВ изменением напряжения якоря. Система преобразователь двигатель ω = U/kФ – IR/kФ
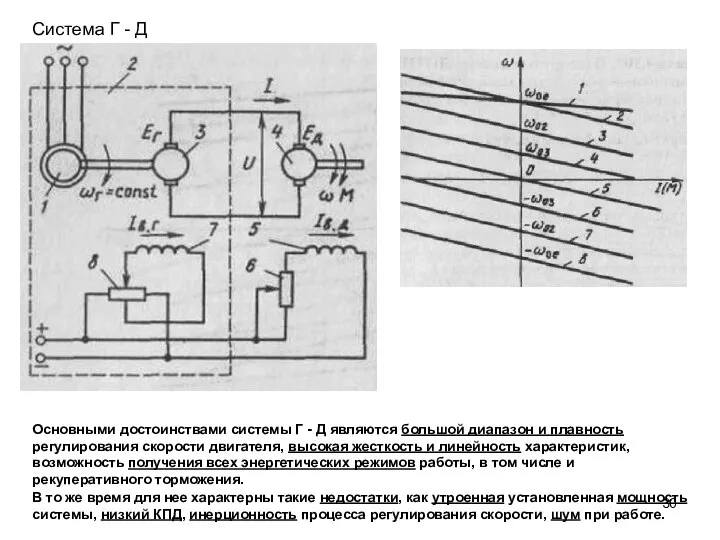
- 29. Система «генератор - двигатель» В этой системе, схема которой показана на рисунке, якорь 4 двигателя непосредственно
- 30. Система Г - Д Основными достоинствами системы Г - Д являются большой диапазон и плавность регулирования
- 31. Система тиристорный преобразователь - двигатель Основным типом преобразователей, являются полупроводниковые статические преобразователи и, в первую очередь,
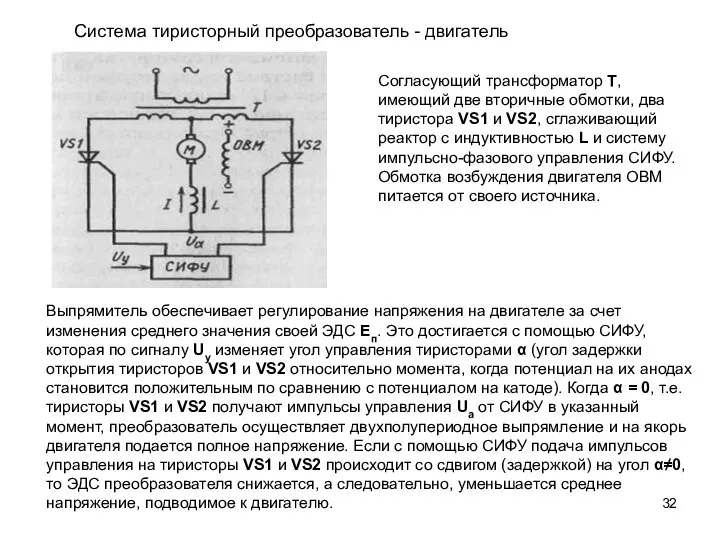
- 32. Система тиристорный преобразователь - двигатель Согласующий трансформатор Т, имеющий две вторичные обмотки, два тиристора VS1 и
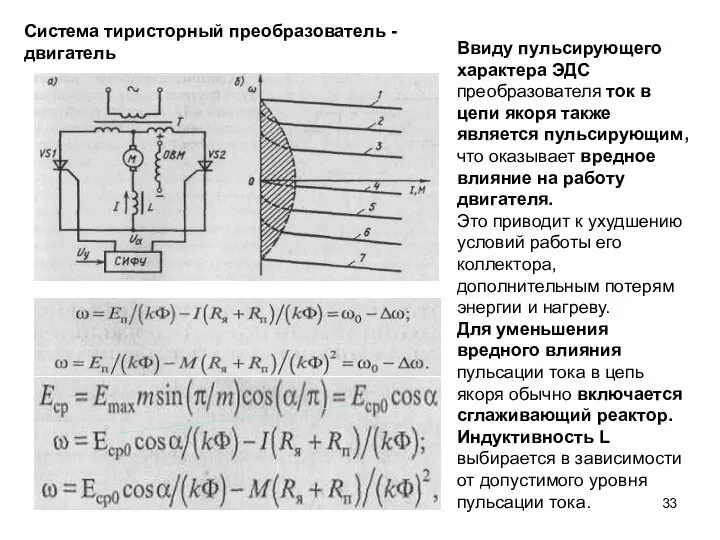
- 33. Система тиристорный преобразователь - двигатель Ввиду пульсирующего характера ЭДС преобразователя ток в цепи якоря также является
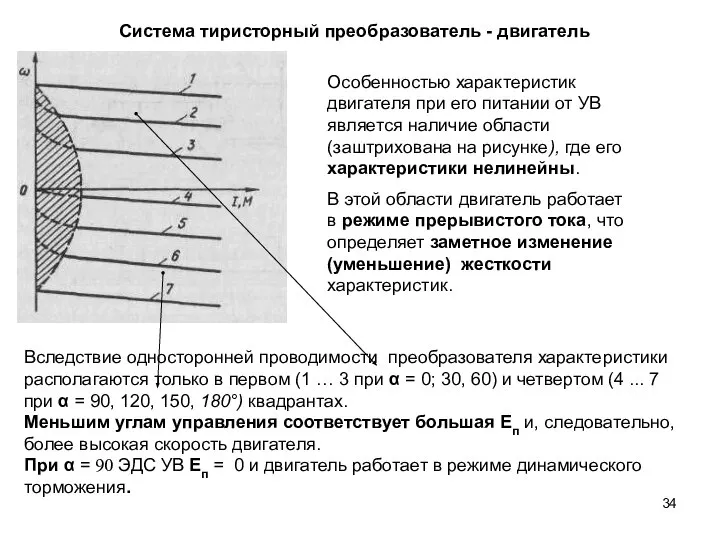
- 34. Особенностью характеристик двигателя при его питании от УВ является наличие области (заштрихована на рисунке), где его
- 35. Трехфазный мостовой нереверсивный УВ Пульсации тока в якоре двигателя при использовании такой схемы меньше, чем при
- 36. Для получения характеристик двигателя во всех четырех квадрантах используются реверсивные управляемые выпрямители, которые состоят из двух
- 37. В реверсивных УВ используются два основных принципа управления комплектами вентилей: совместное и раздельное Совместное управление предусматривает
- 38. Раздельное управление используется для полного исключения уравнительных токов между комплектами тиристоров реверсивного УВ. Сущность его состоит
- 39. Наряду со значительными достоинствами системе ТП - Д присущи следующие недостатки: преобразователь имеет одностороннюю проводимость; для
- 40. Регулирование скорости ДПТНВ шунтированием якоря Rш = const Rп = const Для ЭП ряда подъемно-транспортных машин
- 41. Рассмотренный способ регулирования скорости имеет следующие показатели: диапазон регулирования скорости 5...6 (D=ωmax/ωmin); плавность регулирования, определяемую плавностью
- 42. Источники энергии (справка) Любой источник энергии можно представить в виде источника ЭДС или источника тока. Источник
- 43. Источники энергии (справка) Возможен другой путь идеализации источника: представление его в виде источника тока. Источником тока
- 44. Регулирование координат в системе «ИТ-Д» В рассмотренных ранее схемах системы «преобразователь - двигатель» якорь питался от
- 45. Регулирование координат в системе «ИТ-Д» (продолжение) P = ω M ω = P/M Источник напряжения Источник
- 46. Регулирование координат в системе «ИТ-Д» (продолжение) Схема системы, получившей название «источник тока - двигатель» (ИТ -
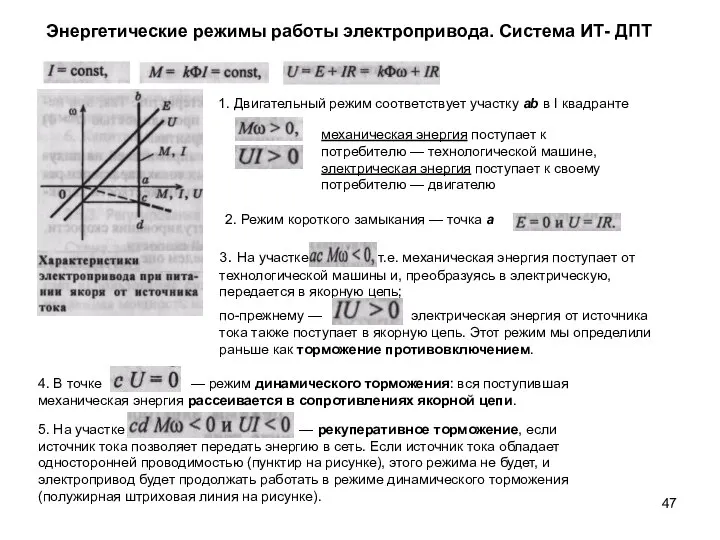
- 47. Энергетические режимы работы электропривода. Система ИТ- ДПТ 1. Двигательный режим соответствует участку ab в I квадранте
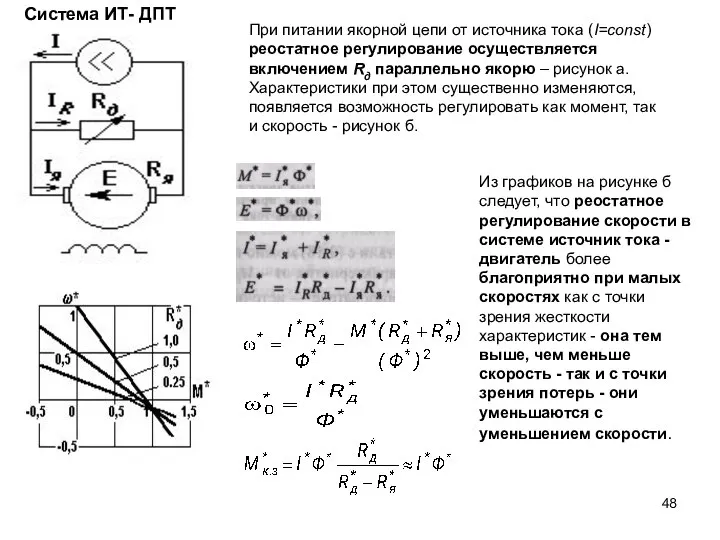
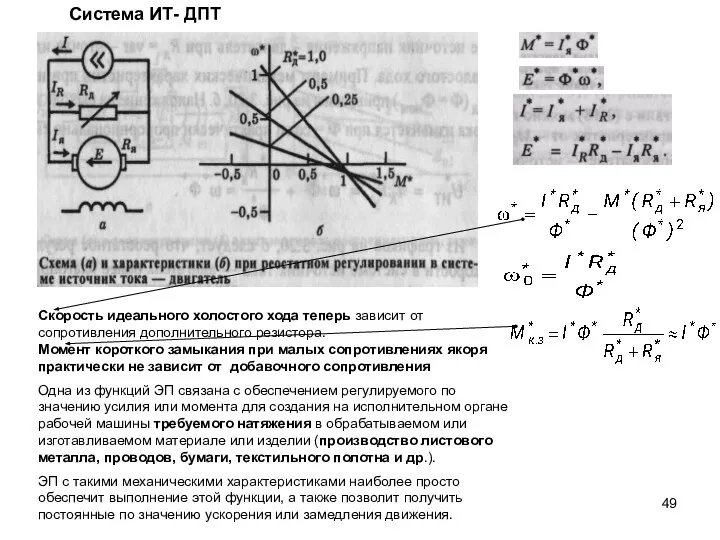
- 48. При питании якорной цепи от источника тока (I=const) реостатное регулирование осуществляется включением Rд параллельно якорю –
- 49. Скорость идеального холостого хода теперь зависит от сопротивления дополнительного резистора. Момент короткого замыкания при малых сопротивлениях
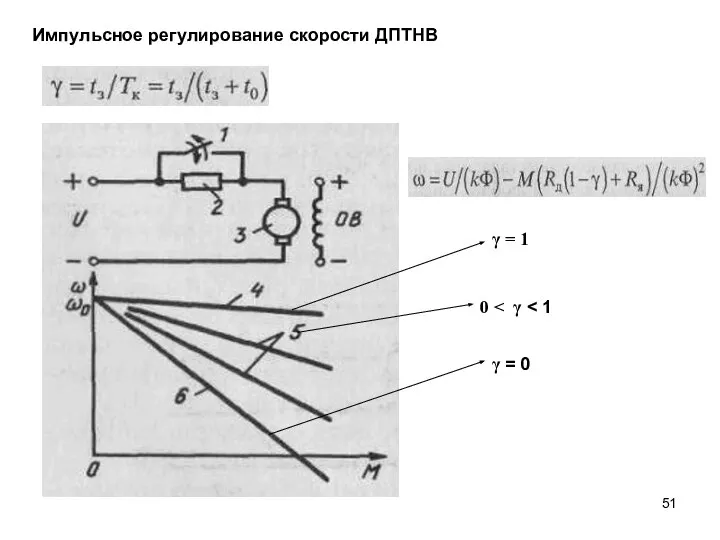
- 50. Импульсное регулирование скорости ДПТНВ В последние годы в связи с развитием полупроводниковой техники получил распространение импульсный
- 51. Импульсное регулирование скорости ДПТНВ γ = 1 γ = 0 0
- 52. Импульсное регулирование скорости ДПТНВ
- 53. В схемах импульсного регулирования современных ЭП применяются бесконтактные полупроводниковые ключи, обычно тиристорные. Работу такого ключа поясним
- 54. Принцип действия ключа На рис. б представлена еще одна распространенная схема тиристорного ключа, которая обычно используется
- 56. СХЕМА ВКЛЮЧЕНИЯ, СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ И РЕЖИМЫ РАБОТЫ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ В ЭП электрического транспорта
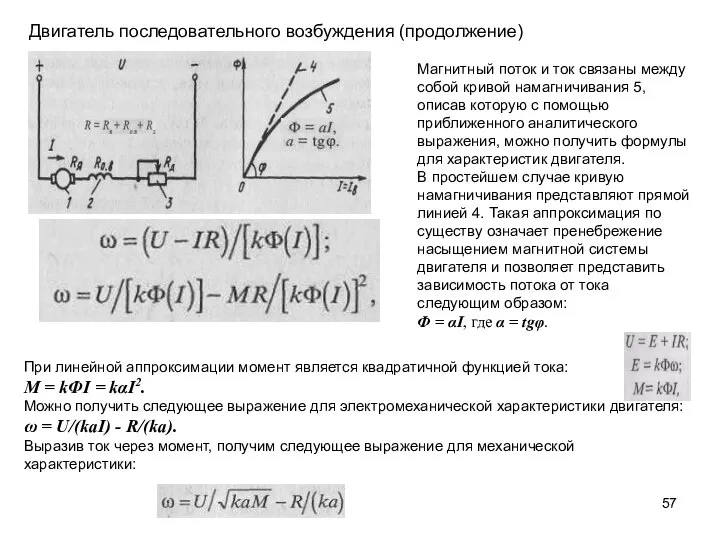
- 57. Двигатель последовательного возбуждения (продолжение) Магнитный поток и ток связаны между собой кривой намагничивания 5, описав которую
- 58. Двигательный режим – 0 Режим короткого замыкания ω = 0 Нет режима холостого хода и генератора,
- 59. Особенность полученных характеристик состоит в том, что при небольших токах и моментах двигателя, соответствующих малым моментам
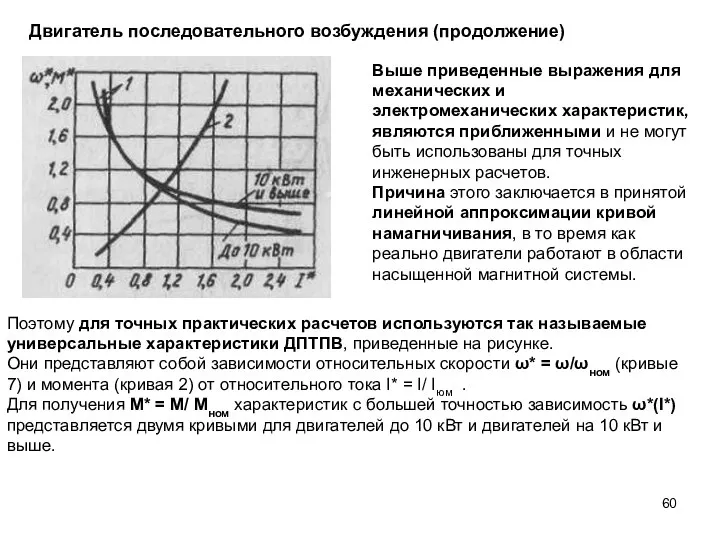
- 60. Двигатель последовательного возбуждения (продолжение) Выше приведенные выражения для механических и электромеханических характеристик, являются приближенными и не
- 61. Регулирование координат ДПТПВ с помощью резисторов
- 62. Регулирование скорости ДПТПВ изменением магнитного потока, напряжения и шунтированием резистором якоря Регулирование магнитного потока ω =U/[kФ(I)]-IR/[kФ(I)]
- 63. Регулирование изменением напряжения ω =U/[kФ(I)]-IR/[kФ(I)]
- 64. Шунтирование якоря ω =U/[kФ(I)]-IR/[kФ(I)]
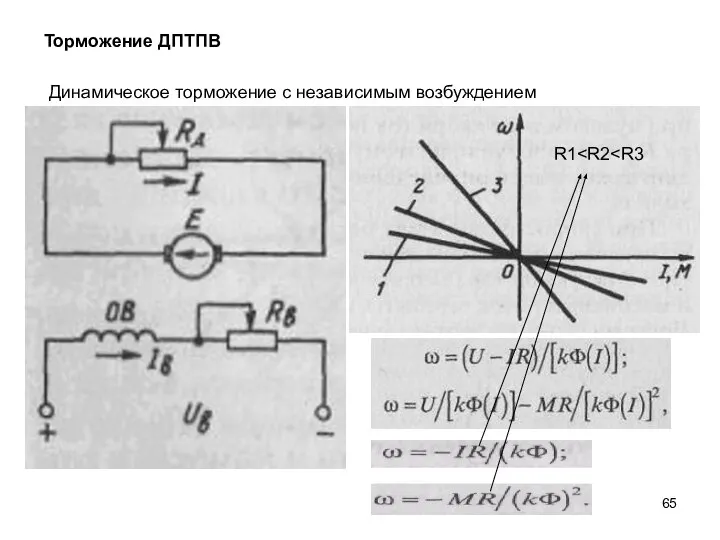
- 65. Торможение ДПТПВ Динамическое торможение c независимым возбуждением R1
- 66. Динамическое торможение с самовозбуждением Условия самовозбуждения: наличие Фост; совпадение по направлению Фост и основного Ф; сопротивление
- 67. Торможение противовключением Осуществляется изменением полярности напряжения на обмотке якоря при сохранении того же направления тока в
- 68. Электропривод с ДПТ смешанного возбуждения
- 70. Скачать презентацию
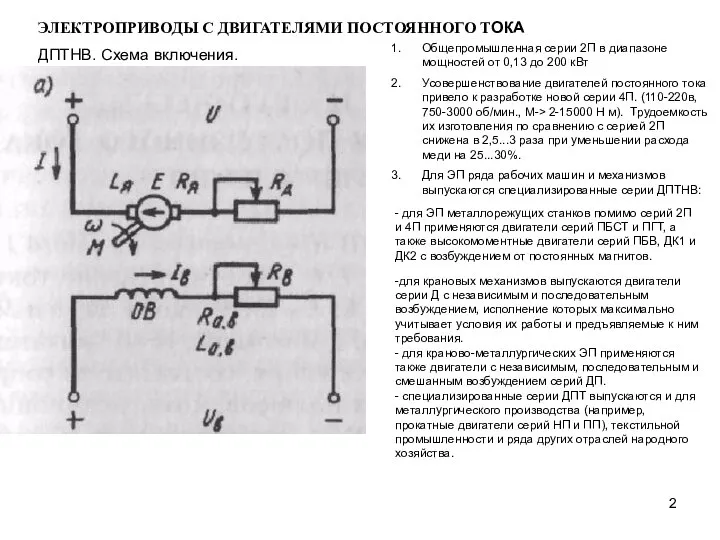
ЭЛЕКТРОПРИВОДЫ С ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА
ДПТНВ. Схема включения.
Общепромышленная серии 2П в
ЭЛЕКТРОПРИВОДЫ С ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА
ДПТНВ. Схема включения.
Общепромышленная серии 2П в
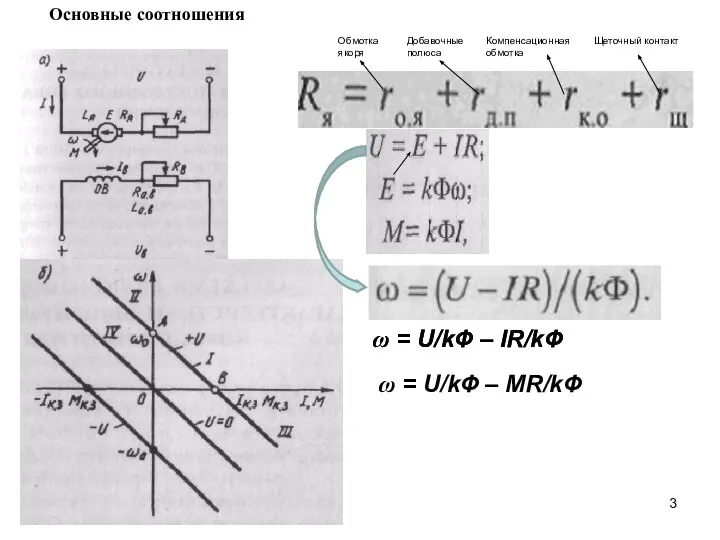
Основные соотношения
Обмотка якоря
Добавочные полюса
Компенсационная обмотка
Щеточный контакт
ω = U/kФ – IR/kФ
ω
Основные соотношения
Обмотка якоря
Добавочные полюса
Компенсационная обмотка
Щеточный контакт
ω = U/kФ – IR/kФ
ω
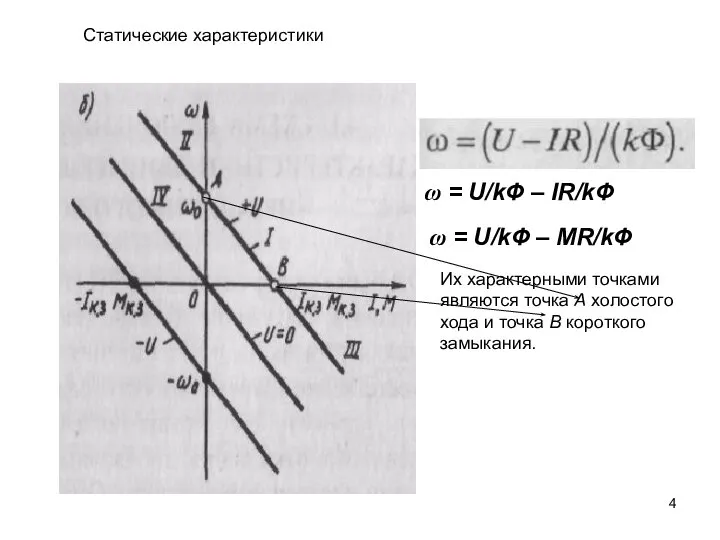
Статические характеристики
ω = U/kФ – IR/kФ
ω = U/kФ – MR/kФ
Их характерными
Статические характеристики
ω = U/kФ – IR/kФ
ω = U/kФ – MR/kФ
Их характерными
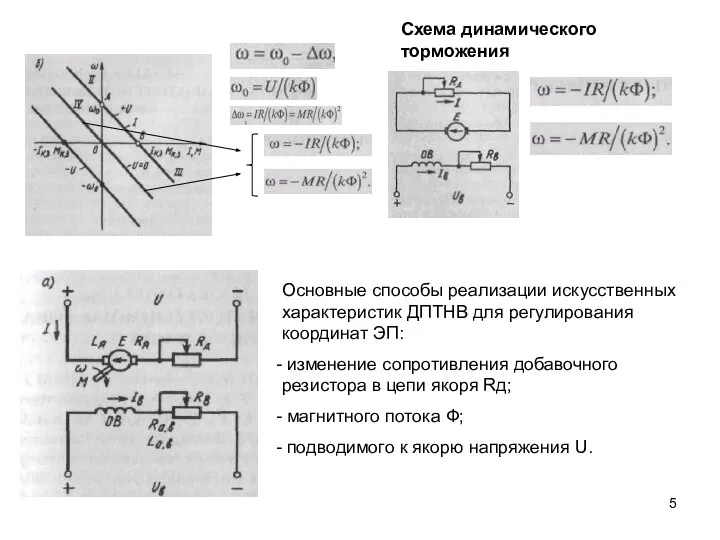
Основные способы реализации искусственных характеристик ДПТНВ для регулирования координат ЭП:
изменение
Основные способы реализации искусственных характеристик ДПТНВ для регулирования координат ЭП:
изменение
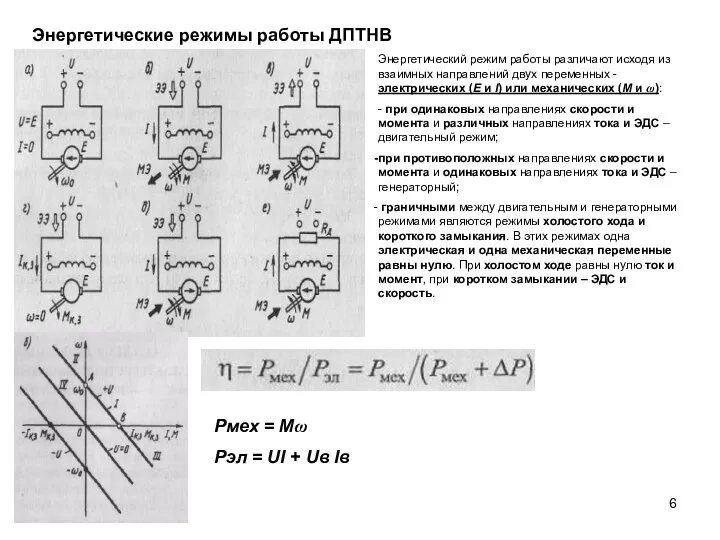
Энергетические режимы работы ДПТНВ
Энергетический режим работы различают исходя из взаимных направлений
Энергетические режимы работы ДПТНВ
Энергетический режим работы различают исходя из взаимных направлений
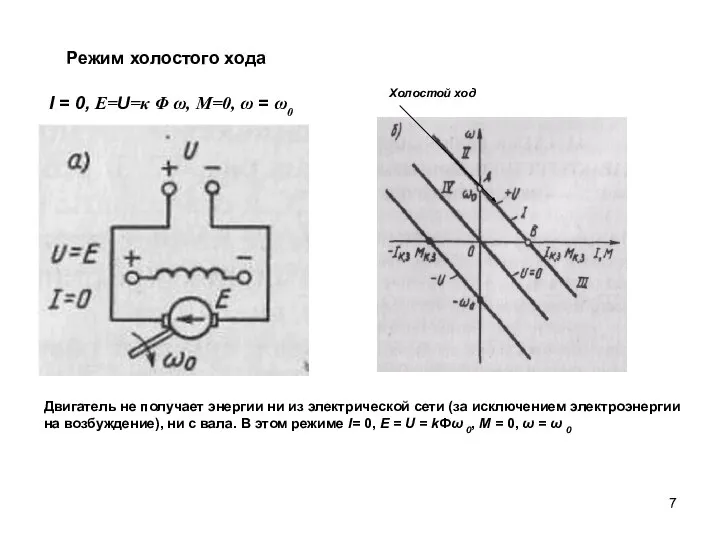
Режим холостого хода
I = 0, Ε=U=κ Φ ω, Μ=0, ω =
Режим холостого хода
I = 0, Ε=U=κ Φ ω, Μ=0, ω =
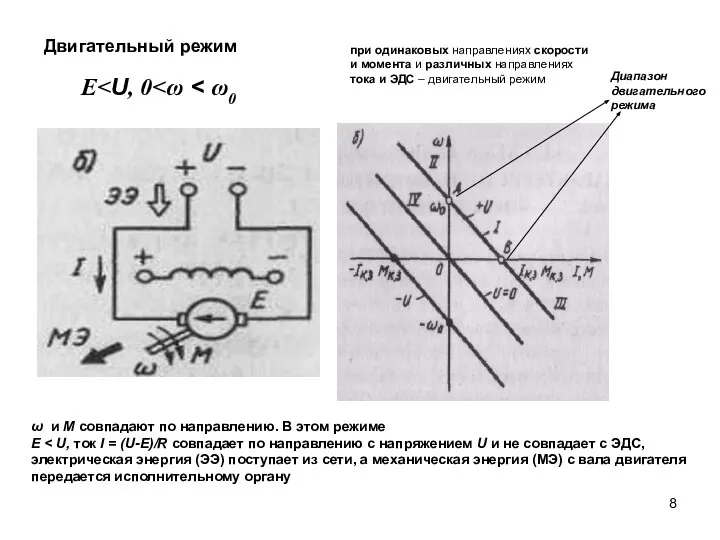
Двигательный режим
ΕДиапазон двигательного режима
ω и М совпадают по
Двигательный режим
Ε Диапазон двигательного режима ω и М совпадают по

Генераторный режим
Ε>U, ω > ω0
Генераторный режим
Генераторный режим работы параллельно с сетью
Генераторный режим
Ε>U, ω > ω0
Генераторный режим
Генераторный режим работы параллельно с сетью
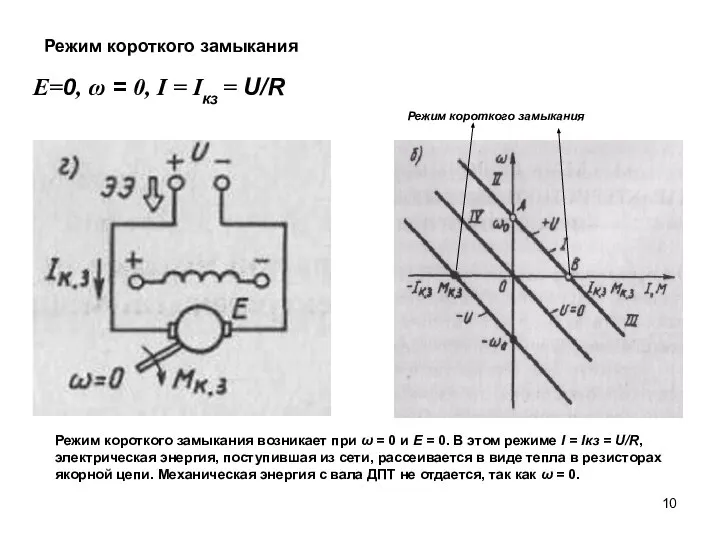
Режим короткого замыкания
Ε=0, ω = 0, Ι = Ιкз = U/R
Режим
Режим короткого замыкания
Ε=0, ω = 0, Ι = Ιкз = U/R
Режим
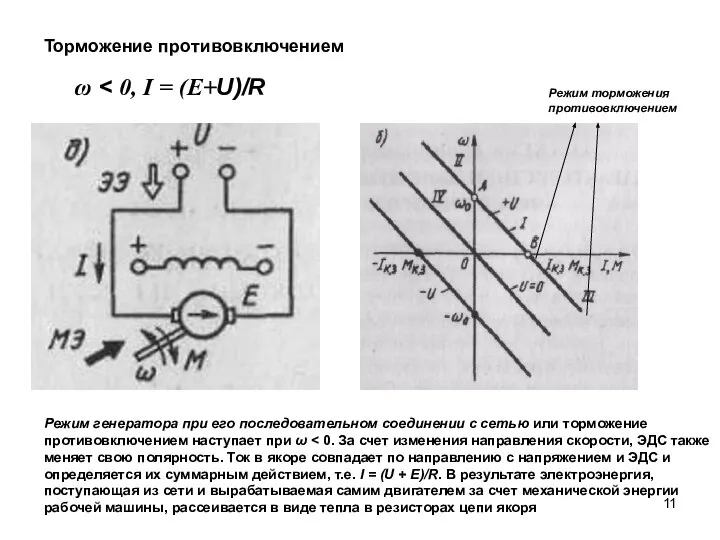
Торможение противовключением
Режим торможения противовключением
ω < 0, Ι = (Ε+U)/R
Режим генератора при
Торможение противовключением
Режим торможения противовключением
ω < 0, Ι = (Ε+U)/R
Режим генератора при
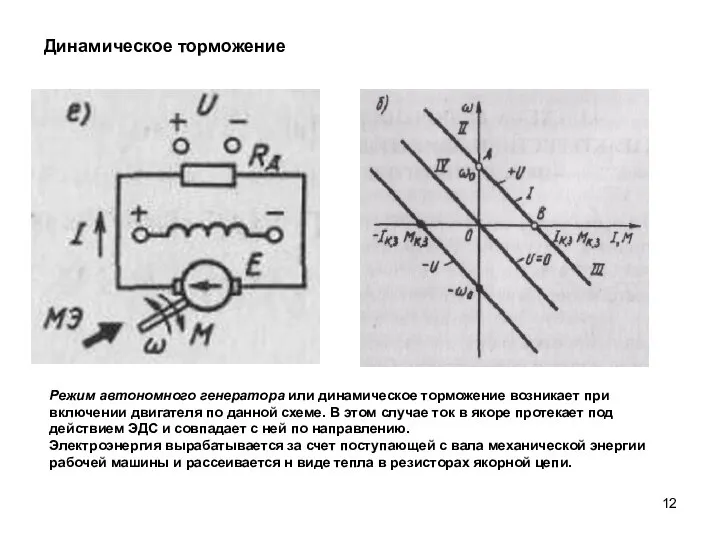
Динамическое торможение
Режим автономного генератора или динамическое торможение возникает при включении двигателя
Динамическое торможение
Режим автономного генератора или динамическое торможение возникает при включении двигателя

Основные показатели регулирования электроприводов
1. Диапазон регулирования угловой скорости.
Обычно диапазон
Основные показатели регулирования электроприводов
1. Диапазон регулирования угловой скорости.
Обычно диапазон

При работе двигателя на разных угловых скоростях следует подсчитывать так называемый
При работе двигателя на разных угловых скоростях следует подсчитывать так называемый

4. Стабильность угловой скорости характеризуется изменением угловой скорости при заданном отклонении
4. Стабильность угловой скорости характеризуется изменением угловой скорости при заданном отклонении
5. Направление регулирования скорости, т. е. уменьшение или увеличение ее по
5. Направление регулирования скорости, т. е. уменьшение или увеличение ее по
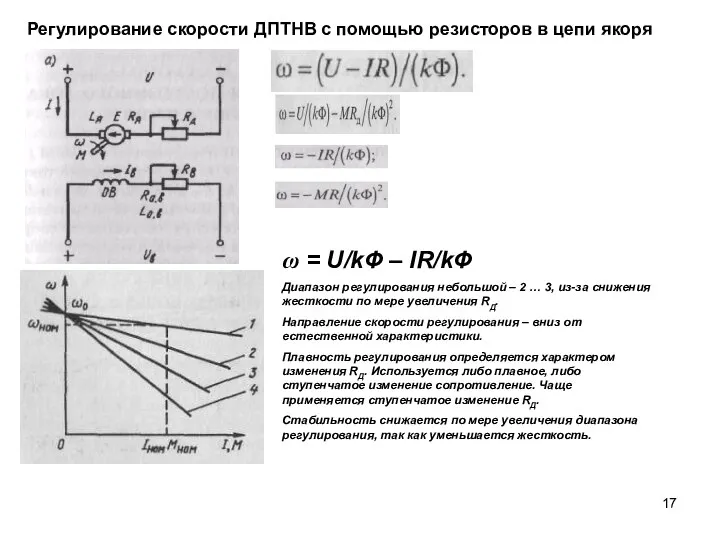
Регулирование скорости ДПТНВ с помощью резисторов в цепи якоря
ω = U/kФ
Регулирование скорости ДПТНВ с помощью резисторов в цепи якоря
ω = U/kФ
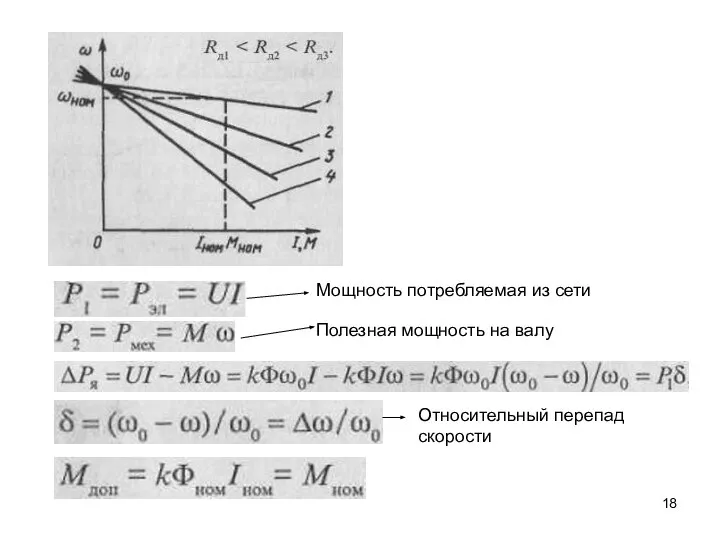
Мощность потребляемая из сети
Полезная мощность на валу
Относительный перепад скорости
Мощность потребляемая из сети
Полезная мощность на валу
Относительный перепад скорости
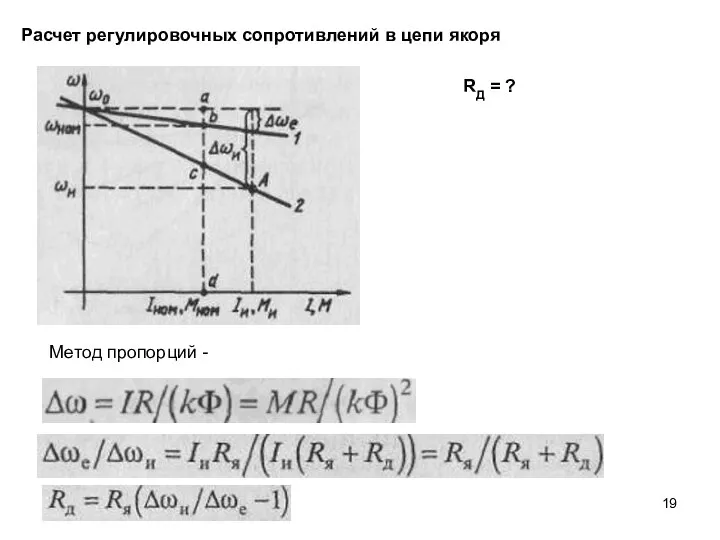
Расчет регулировочных сопротивлений в цепи якоря
RД = ?
Метод пропорций -
Расчет регулировочных сопротивлений в цепи якоря
RД = ?
Метод пропорций -
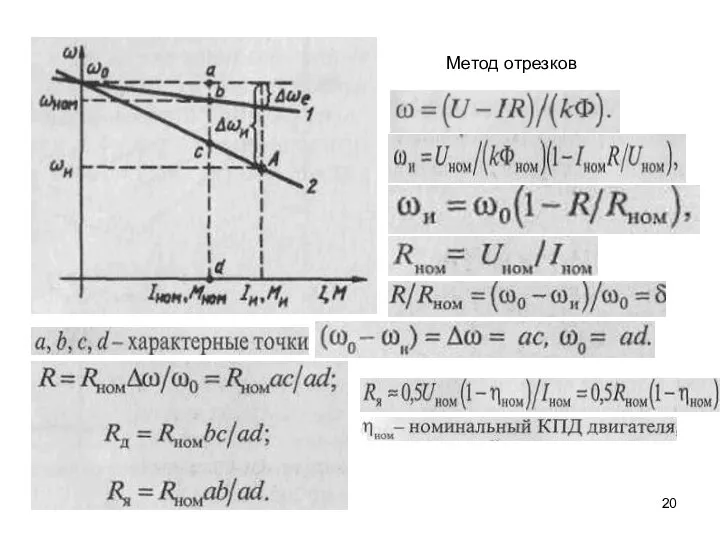
Метод отрезков
Метод отрезков

Регулирование тока и момента при пуске, торможении и реверсе ДПТНВ
Пуск (характеристики
Регулирование тока и момента при пуске, торможении и реверсе ДПТНВ
Пуск (характеристики
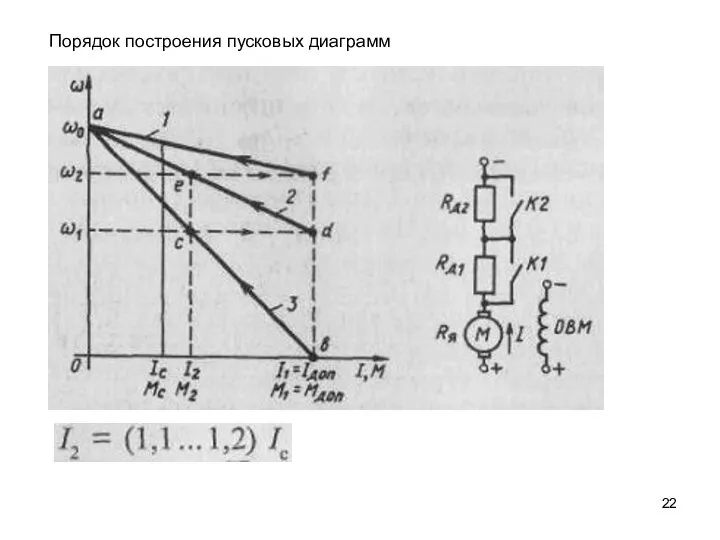
Порядок построения пусковых диаграмм
Порядок построения пусковых диаграмм
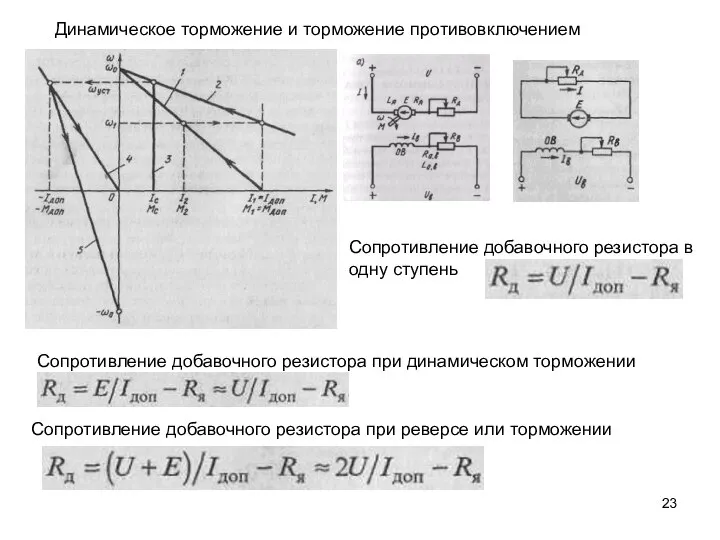
Динамическое торможение и торможение противовключением
Сопротивление добавочного резистора в одну ступень
Сопротивление добавочного
Динамическое торможение и торможение противовключением
Сопротивление добавочного резистора в одну ступень
Сопротивление добавочного
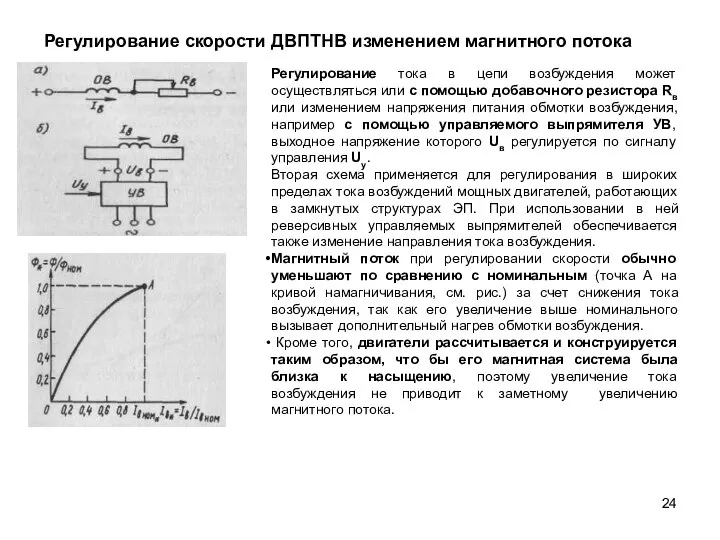
Регулирование скорости ДВПТНВ изменением магнитного потока
Регулирование тока в цепи возбуждения может
Регулирование скорости ДВПТНВ изменением магнитного потока
Регулирование тока в цепи возбуждения может

Уменьшение магнитного потока приводи к увеличению скорости идеального холостого хода ω0.
Уменьшение магнитного потока приводи к увеличению скорости идеального холостого хода ω0.

ω = U/kФ – IR/kФ
ω = U/kФ – IR/kФ
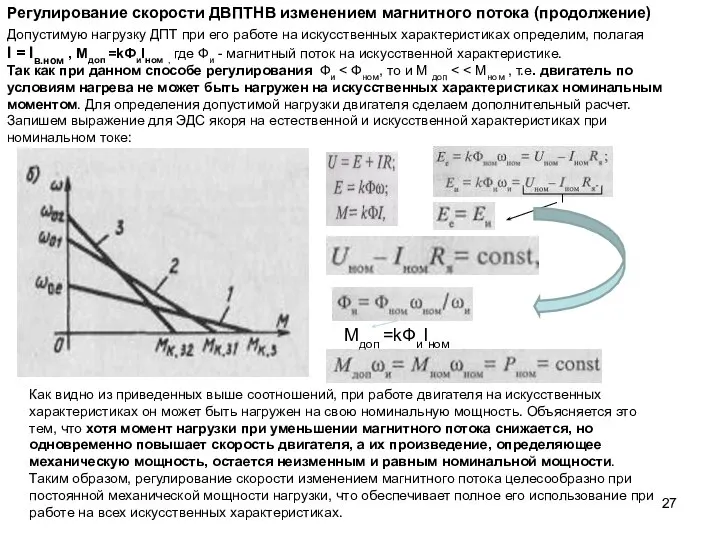
Как видно из приведенных выше соотношений, при работе двигателя на искусственных
Как видно из приведенных выше соотношений, при работе двигателя на искусственных
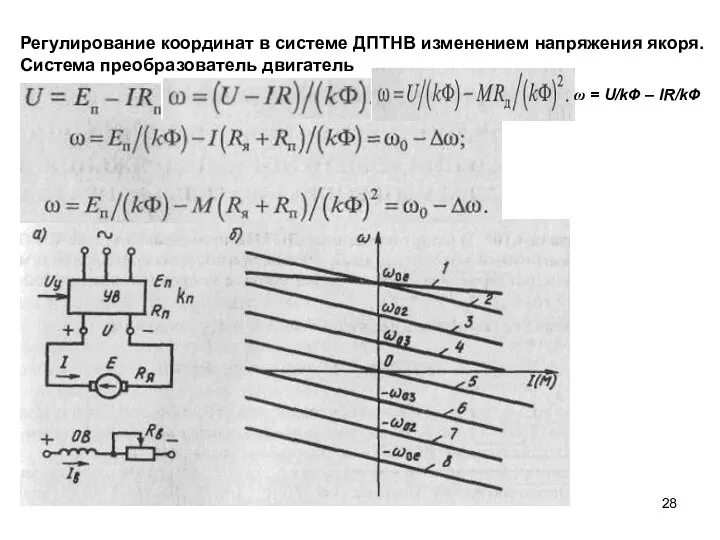
Регулирование координат в системе ДПТНВ изменением напряжения якоря. Система преобразователь двигатель
ω
Регулирование координат в системе ДПТНВ изменением напряжения якоря. Система преобразователь двигатель
ω

Система «генератор - двигатель»
В этой системе, схема которой показана на рисунке,
Система «генератор - двигатель»
В этой системе, схема которой показана на рисунке,
Система Г - Д
Основными достоинствами системы Г - Д являются большой
Система Г - Д
Основными достоинствами системы Г - Д являются большой

Система тиристорный преобразователь - двигатель
Основным типом преобразователей, являются полупроводниковые статические преобразователи
Система тиристорный преобразователь - двигатель
Основным типом преобразователей, являются полупроводниковые статические преобразователи
Система тиристорный преобразователь - двигатель
Согласующий трансформатор Т, имеющий две вторичные обмотки,
Система тиристорный преобразователь - двигатель
Согласующий трансформатор Т, имеющий две вторичные обмотки,
Система тиристорный преобразователь - двигатель
Ввиду пульсирующего характера ЭДС преобразователя ток в
Система тиристорный преобразователь - двигатель
Ввиду пульсирующего характера ЭДС преобразователя ток в
Особенностью характеристик двигателя при его питании от УВ является наличие области
Особенностью характеристик двигателя при его питании от УВ является наличие области
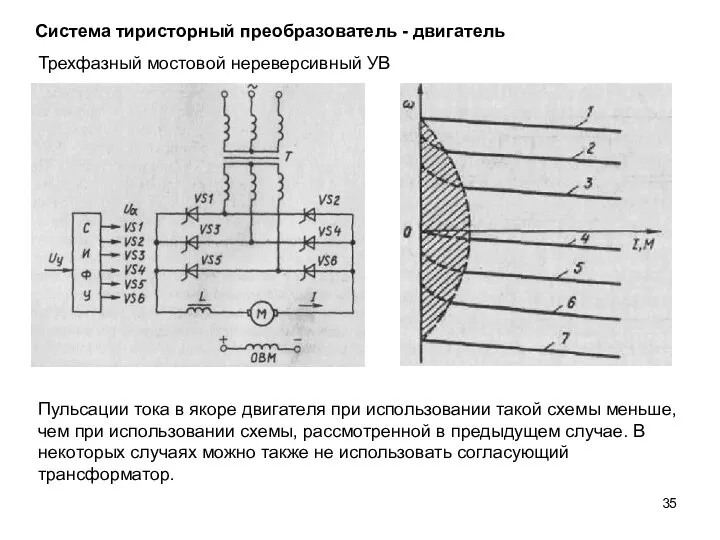
Трехфазный мостовой нереверсивный УВ
Пульсации тока в якоре двигателя при использовании такой
Трехфазный мостовой нереверсивный УВ
Пульсации тока в якоре двигателя при использовании такой
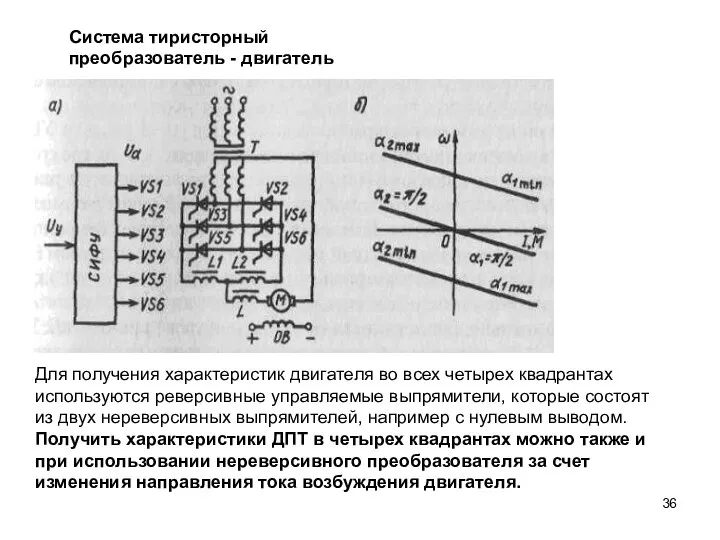
Для получения характеристик двигателя во всех четырех квадрантах используются реверсивные управляемые
Для получения характеристик двигателя во всех четырех квадрантах используются реверсивные управляемые

В реверсивных УВ используются два основных принципа управления комплектами вентилей: совместное
В реверсивных УВ используются два основных принципа управления комплектами вентилей: совместное

Раздельное управление используется для полного исключения уравнительных токов между комплектами тиристоров
Раздельное управление используется для полного исключения уравнительных токов между комплектами тиристоров
Наряду со значительными достоинствами системе ТП - Д присущи следующие недостатки:
Наряду со значительными достоинствами системе ТП - Д присущи следующие недостатки:

Регулирование скорости ДПТНВ шунтированием якоря
Rш = const
Rп = const
Для ЭП ряда
Регулирование скорости ДПТНВ шунтированием якоря
Rш = const
Rп = const
Для ЭП ряда
Рассмотренный способ регулирования скорости имеет следующие показатели:
диапазон регулирования скорости 5...6
Рассмотренный способ регулирования скорости имеет следующие показатели:
диапазон регулирования скорости 5...6
Источники энергии (справка)
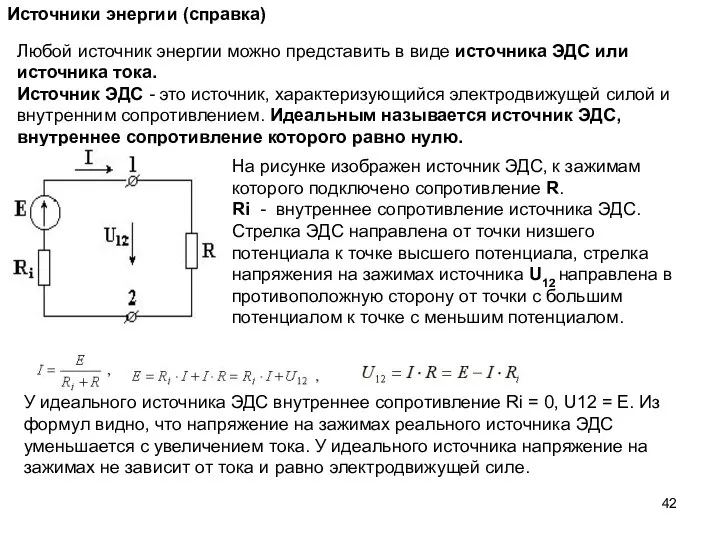
Любой источник энергии можно представить в виде источника ЭДС
Источники энергии (справка)
Любой источник энергии можно представить в виде источника ЭДС
Источники энергии (справка)
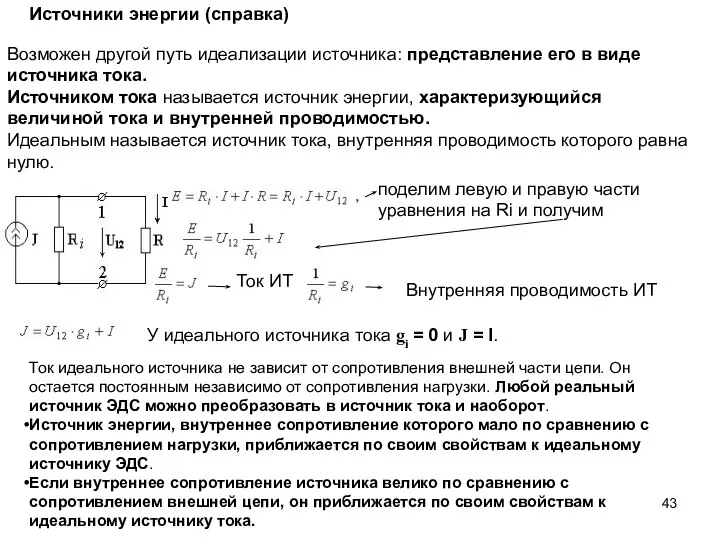
Возможен другой путь идеализации источника: представление его в виде
Источники энергии (справка)
Возможен другой путь идеализации источника: представление его в виде

Регулирование координат в системе «ИТ-Д»
В рассмотренных ранее схемах системы «преобразователь -
Регулирование координат в системе «ИТ-Д»
В рассмотренных ранее схемах системы «преобразователь -
Регулирование координат в системе «ИТ-Д» (продолжение)
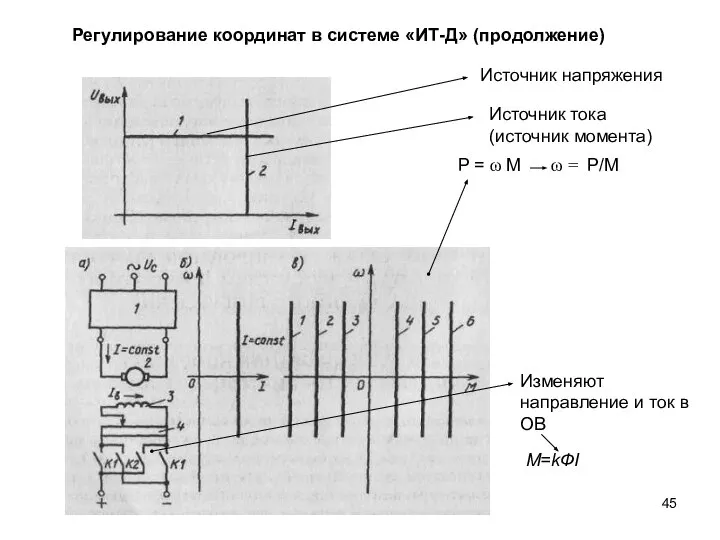
P = ω M ω =
Регулирование координат в системе «ИТ-Д» (продолжение)
P = ω M ω =
Регулирование координат в системе «ИТ-Д» (продолжение)
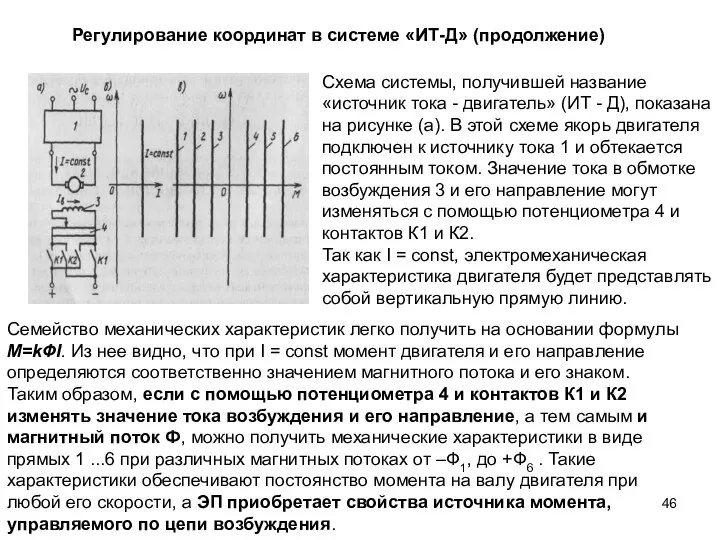
Схема системы, получившей название «источник тока
Регулирование координат в системе «ИТ-Д» (продолжение)
Схема системы, получившей название «источник тока
Энергетические режимы работы электропривода. Система ИТ- ДПТ
1. Двигательный режим соответствует
Энергетические режимы работы электропривода. Система ИТ- ДПТ
1. Двигательный режим соответствует
При питании якорной цепи от источника тока (I=const) реостатное регулирование
При питании якорной цепи от источника тока (I=const) реостатное регулирование
Скорость идеального холостого хода теперь зависит от сопротивления дополнительного резистора.
Момент короткого
Скорость идеального холостого хода теперь зависит от сопротивления дополнительного резистора.
Момент короткого
Импульсное регулирование скорости ДПТНВ
В последние годы в связи с развитием полупроводниковой
Импульсное регулирование скорости ДПТНВ
В последние годы в связи с развитием полупроводниковой
Импульсное регулирование скорости ДПТНВ
γ = 1
γ = 0
0 < γ <
Импульсное регулирование скорости ДПТНВ
γ = 1
γ = 0
0 < γ <

Импульсное регулирование скорости ДПТНВ
Импульсное регулирование скорости ДПТНВ
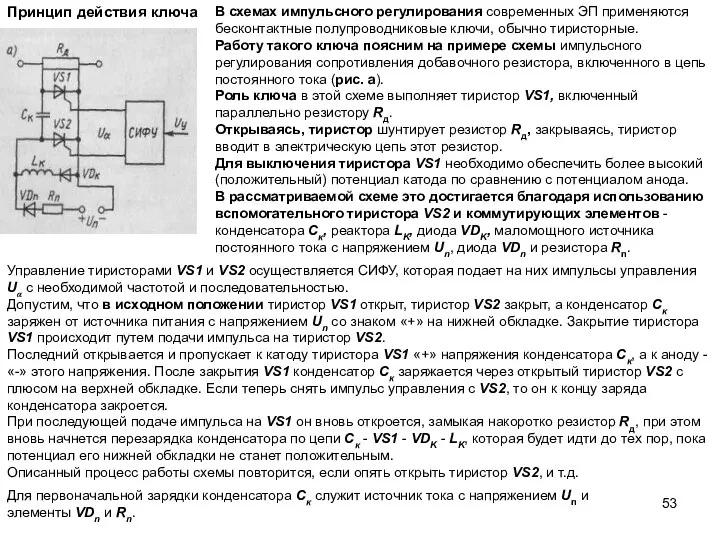
В схемах импульсного регулирования современных ЭП применяются бесконтактные полупроводниковые ключи, обычно
В схемах импульсного регулирования современных ЭП применяются бесконтактные полупроводниковые ключи, обычно

Принцип действия ключа
На рис. б представлена еще одна распространенная схема тиристорного
Принцип действия ключа
На рис. б представлена еще одна распространенная схема тиристорного


СХЕМА ВКЛЮЧЕНИЯ, СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ И РЕЖИМЫ РАБОТЫ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА ПОСЛЕДОВАТЕЛЬНОГО
СХЕМА ВКЛЮЧЕНИЯ, СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ И РЕЖИМЫ РАБОТЫ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА ПОСЛЕДОВАТЕЛЬНОГО
Двигатель последовательного возбуждения (продолжение)
Магнитный поток и ток связаны между собой кривой
Двигатель последовательного возбуждения (продолжение)
Магнитный поток и ток связаны между собой кривой
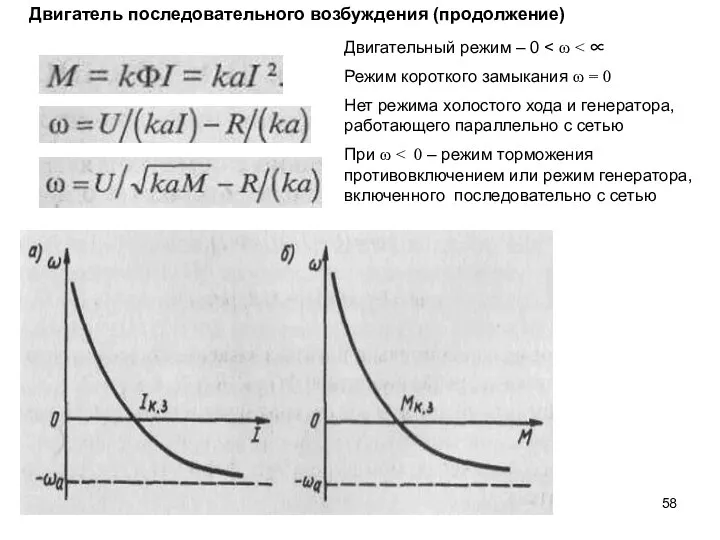
Двигательный режим – 0 < ω < ∝
Режим короткого замыкания ω
Двигательный режим – 0 < ω < ∝
Режим короткого замыкания ω
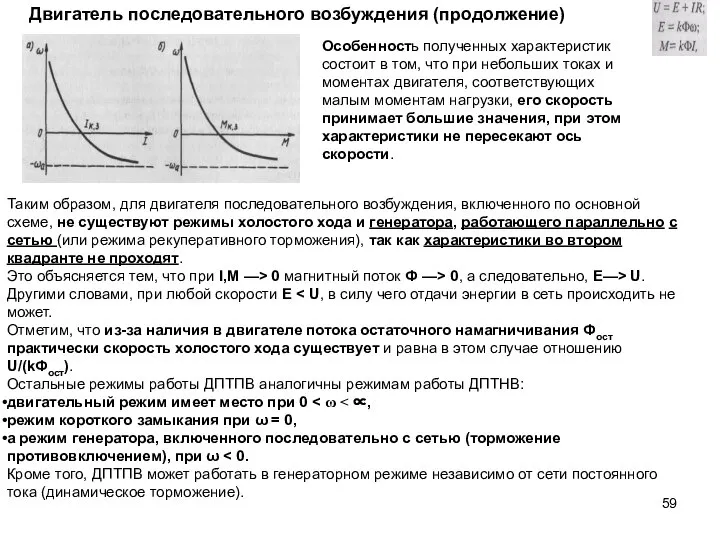
Особенность полученных характеристик состоит в том, что при небольших токах и
Особенность полученных характеристик состоит в том, что при небольших токах и
Двигатель последовательного возбуждения (продолжение)
Выше приведенные выражения для механических и электромеханических характеристик,
Двигатель последовательного возбуждения (продолжение)
Выше приведенные выражения для механических и электромеханических характеристик,

Регулирование координат ДПТПВ с помощью резисторов
Регулирование координат ДПТПВ с помощью резисторов
![Регулирование скорости ДПТПВ изменением магнитного потока, напряжения и шунтированием резистором якоря Регулирование магнитного потока ω =U/[kФ(I)]-IR/[kФ(I)]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1456463/slide-61.jpg)
Регулирование скорости ДПТПВ изменением магнитного потока, напряжения и шунтированием резистором якоря
Регулирование
Регулирование скорости ДПТПВ изменением магнитного потока, напряжения и шунтированием резистором якоря
Регулирование
![Регулирование изменением напряжения ω =U/[kФ(I)]-IR/[kФ(I)]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1456463/slide-62.jpg)
Регулирование изменением напряжения
ω =U/[kФ(I)]-IR/[kФ(I)]
Регулирование изменением напряжения
ω =U/[kФ(I)]-IR/[kФ(I)]
![Шунтирование якоря ω =U/[kФ(I)]-IR/[kФ(I)]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1456463/slide-63.jpg)
Шунтирование якоря
ω =U/[kФ(I)]-IR/[kФ(I)]
Шунтирование якоря
ω =U/[kФ(I)]-IR/[kФ(I)]
Торможение ДПТПВ
Динамическое торможение c независимым возбуждением
R1
Торможение ДПТПВ
Динамическое торможение c независимым возбуждением
R1
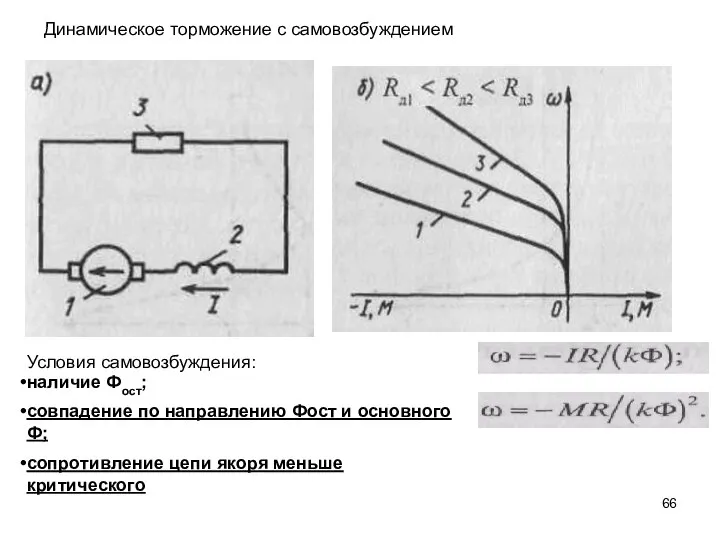
Динамическое торможение с самовозбуждением
Условия самовозбуждения:
наличие Фост;
совпадение по направлению Фост и основного
Динамическое торможение с самовозбуждением
Условия самовозбуждения:
наличие Фост;
совпадение по направлению Фост и основного
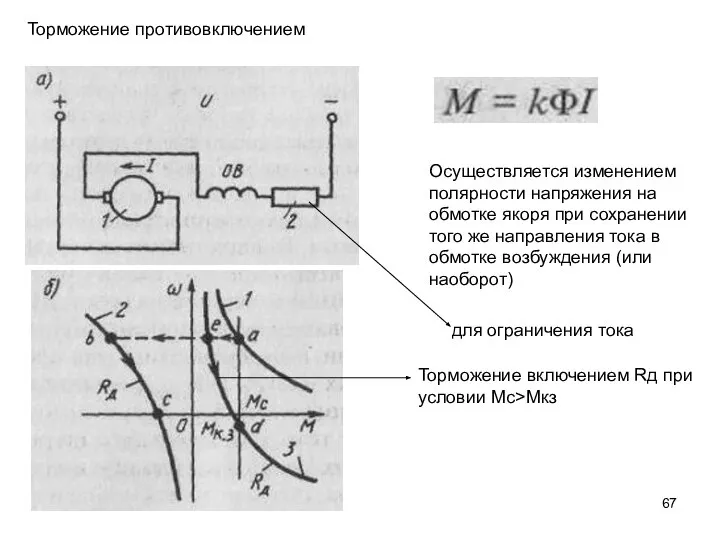
Торможение противовключением
Осуществляется изменением полярности напряжения на обмотке якоря при сохранении того
Торможение противовключением
Осуществляется изменением полярности напряжения на обмотке якоря при сохранении того
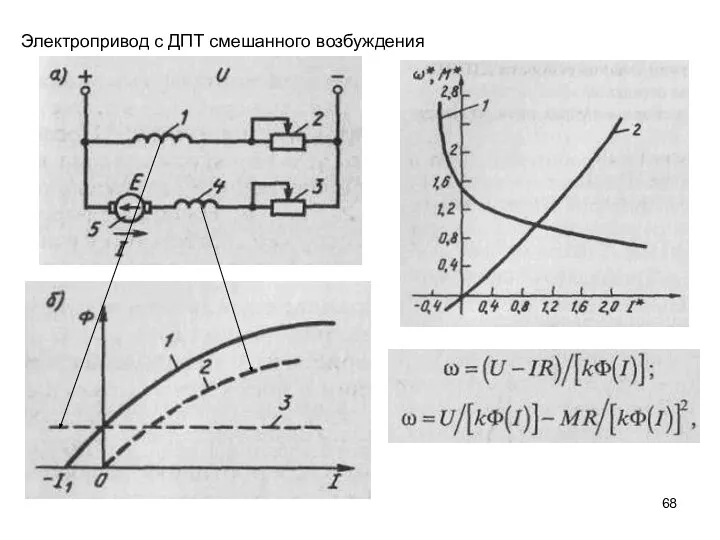
Электропривод с ДПТ смешанного возбуждения
Электропривод с ДПТ смешанного возбуждения
 Филипп Трейси. Безумый шляпник
Филипп Трейси. Безумый шляпник Демократия
Демократия Teatro Colon
Teatro Colon Профессиональная мотивация и удовлетворенность трудом сотрудников салонов красоты с разным стажем работы
Профессиональная мотивация и удовлетворенность трудом сотрудников салонов красоты с разным стажем работы Перевозка крупногабаритной, тяжеловесной техники и оборудования для любых отраслей промышленности по России и СНГ
Перевозка крупногабаритной, тяжеловесной техники и оборудования для любых отраслей промышленности по России и СНГ Комбинационные блоки
Комбинационные блоки Ауыстырмалы-төкпелі пункттардағы жүктерді тиеп-түсіру жұмыстарының технологиясы және механикалары
Ауыстырмалы-төкпелі пункттардағы жүктерді тиеп-түсіру жұмыстарының технологиясы және механикалары Презентация "США" - скачать презентации по Экономике
Презентация "США" - скачать презентации по Экономике Современная Front-End разработка. (Лекция 8)
Современная Front-End разработка. (Лекция 8) Основы радиотехнических методов получения и передачи информации
Основы радиотехнических методов получения и передачи информации Основы web программирования. HTML5, CSS3 , PHP 7.0 , MySQL
Основы web программирования. HTML5, CSS3 , PHP 7.0 , MySQL Организация прерываний. Аппаратные прерывания
Организация прерываний. Аппаратные прерывания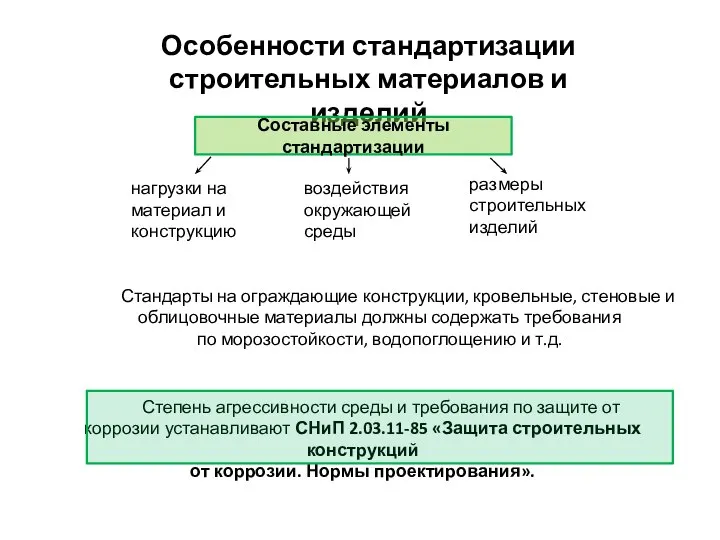 Особенности стандартизации строительных материалов и изделий
Особенности стандартизации строительных материалов и изделий Олешницька загальноосвітня школа I-III ступенів Олешницька загальноосвітня школа I-III ступенів
Олешницька загальноосвітня школа I-III ступенів Олешницька загальноосвітня школа I-III ступенів Основные конструктивные элементы здания с железобетонным каркасом
Основные конструктивные элементы здания с железобетонным каркасом Презентация Российский рынок труда: состав, состояние и перспективы развития
Презентация Российский рынок труда: состав, состояние и перспективы развития Кафедра Бухгалтерского учета и аудита Преподаватель: Терентьева Т.В. К.э.н., доцент ТЕМА 5. СТОИМОСТНОЕ ИЗМЕРЕНИЕ И ТЕКУЩИЙ БУХГА
Кафедра Бухгалтерского учета и аудита Преподаватель: Терентьева Т.В. К.э.н., доцент ТЕМА 5. СТОИМОСТНОЕ ИЗМЕРЕНИЕ И ТЕКУЩИЙ БУХГА Т6 ФО РЛ.ppt
Т6 ФО РЛ.ppt Возрастные особенности шестиклассника
Возрастные особенности шестиклассника Валы и оси редуктора
Валы и оси редуктора Доклад на тему «Анализ состояния производственного потенциала России и отдельных её отраслей» Выполнила Моисеенкова Оля и Одинц
Доклад на тему «Анализ состояния производственного потенциала России и отдельных её отраслей» Выполнила Моисеенкова Оля и Одинц Египетский стиль
Египетский стиль Поворот плана скоростей
Поворот плана скоростей Моделирование методической темы как инновационного проекта И.Ш.Галеева , методист ГМЦ , учитель русского языка и литературы, уч
Моделирование методической темы как инновационного проекта И.Ш.Галеева , методист ГМЦ , учитель русского языка и литературы, уч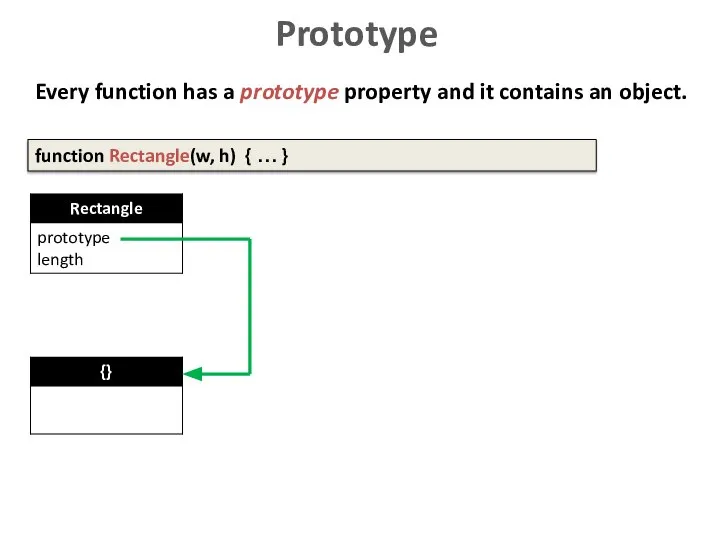 Prototype-based programming
Prototype-based programming ТАЙМ-МЕНЕДЖМЕНТ ИСКУССТВО ОРГАНИЗАЦИИ ЖИЗНЕДЕЯТЕЛЬНОСТИ
ТАЙМ-МЕНЕДЖМЕНТ ИСКУССТВО ОРГАНИЗАЦИИ ЖИЗНЕДЕЯТЕЛЬНОСТИ  Первый МГМУ имени И.М. Сеченова Кафедра общественного здоровья и здравоохранения ЗАКОНОДАТЕЛЬСТВО В ЗДРАВООХРАНЕНИИ Про
Первый МГМУ имени И.М. Сеченова Кафедра общественного здоровья и здравоохранения ЗАКОНОДАТЕЛЬСТВО В ЗДРАВООХРАНЕНИИ Про Основные концепции модельно-центрированной разработки (MDA, MOF, XMI)
Основные концепции модельно-центрированной разработки (MDA, MOF, XMI)