- Т6 ФО РЛ.ppt

Содержание
- 2. * Розділ IV “Експлуатація і ремонт радіоелектронного обладнання літаків, вертольотів та авіаційних ракет” Тема 6. “Фізичні
- 3. * Принцип дії і характеристики РЛС. Методи визначення координат цілей. Навчальна та виховна мета Ознайомити з
- 4. * Контрольні завдання (ФО РЛ) Поясніть, як співвідносяться ЕПР металевого шару з його видимою площею –
- 5. * Загальні відомості про РЛС Радіолокація – галузь радіотехніки, яка займається застосуванням електромагнітних хвиль радіодіапазону для
- 6. * Технічний засіб, призначений для рішення задач радіолокації, зветься радіолокаційною станцією (РЛС) або радаром. Для отримання
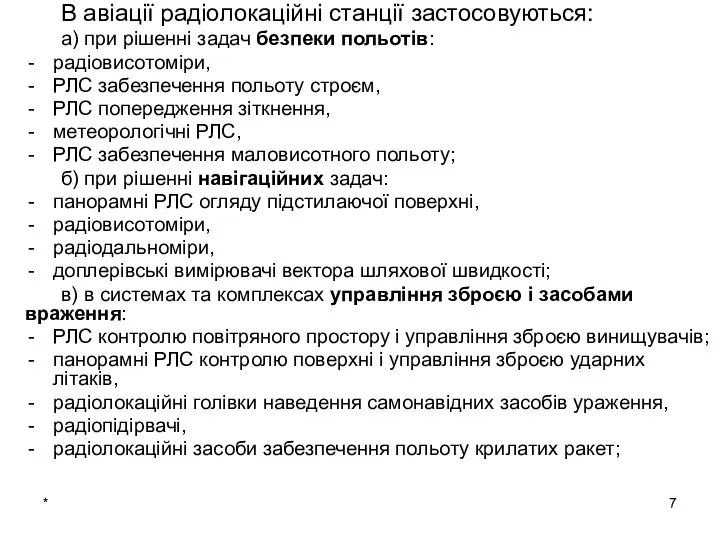
- 7. * В авіації радіолокаційні станції застосовуються: а) при рішенні задач безпеки польотів: радіовисотоміри, РЛС забезпечення польоту
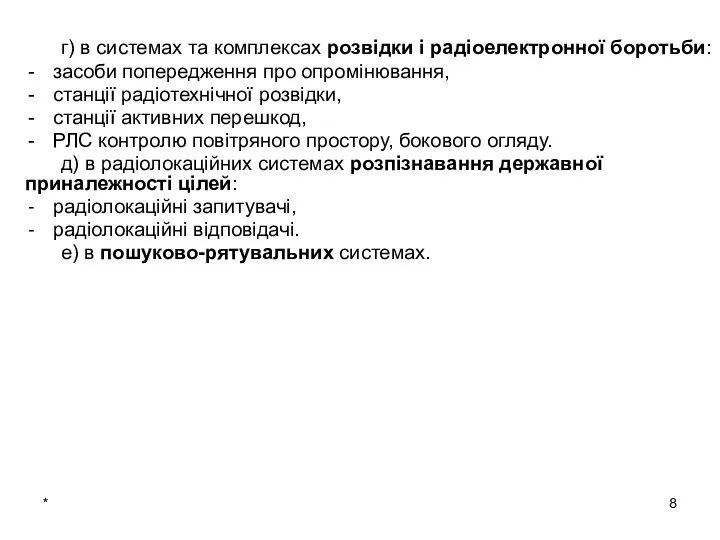
- 8. * г) в системах та комплексах розвідки і радіоелектронної боротьби: засоби попередження про опромінювання, станції радіотехнічної
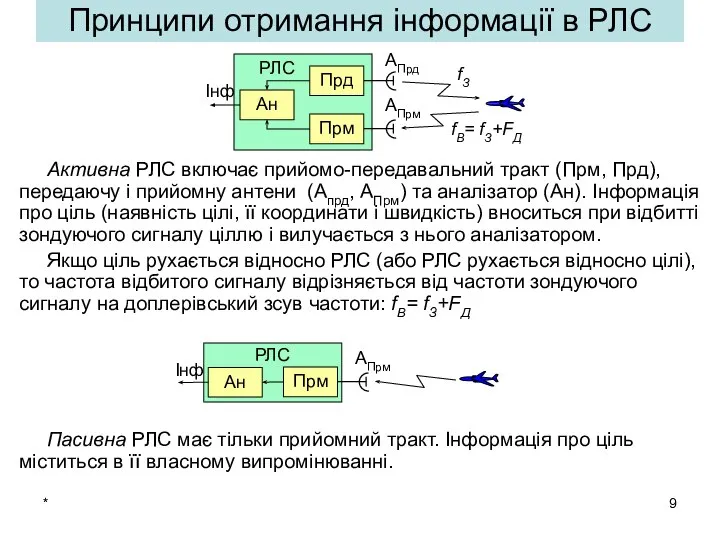
- 9. * Принципи отримання інформації в РЛС Активна РЛС включає прийомо-передавальний тракт (Прм, Прд), передаючу і прийомну
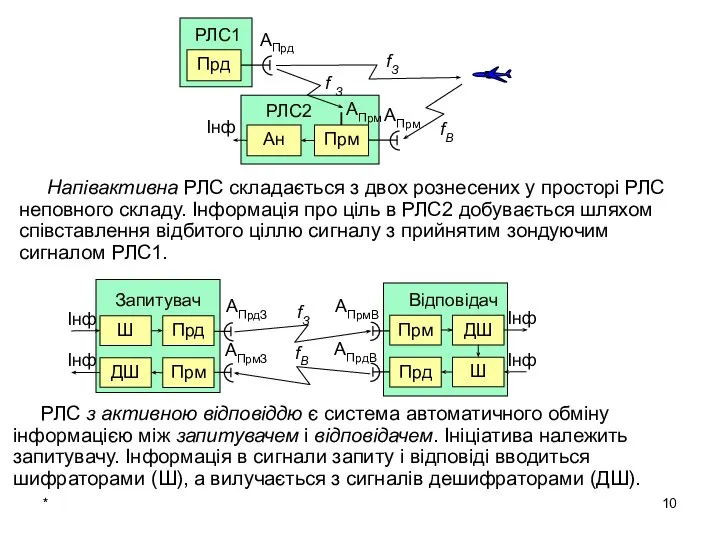
- 10. * РЛС з активною відповіддю є система автоматичного обміну інформацією між запитувачем і відповідачем. Ініціатива належить
- 11. В залежності від способу розміщення апаратури РЛС ділять на однопозиційні і багатопозиційні. Багатопозиційна РЛС – це
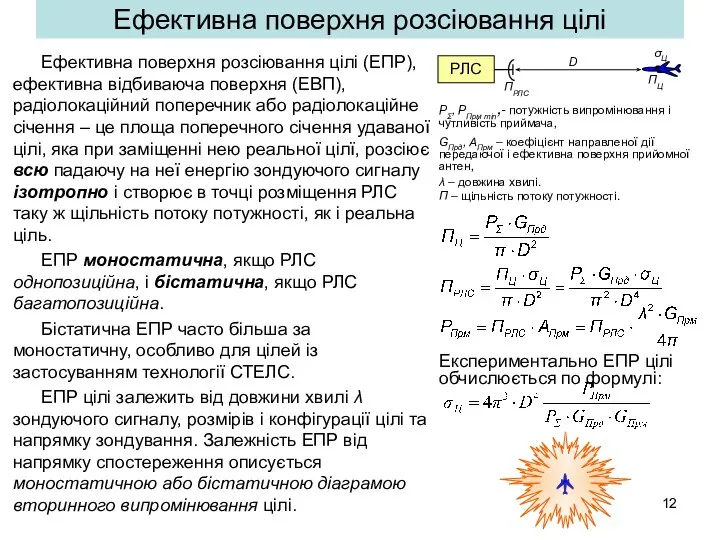
- 12. Ефективна поверхня розсіювання цілі Ефективна поверхня розсіювання цілі (ЕПР), ефективна відбиваюча поверхня (ЕВП), радіолокаційний поперечник або
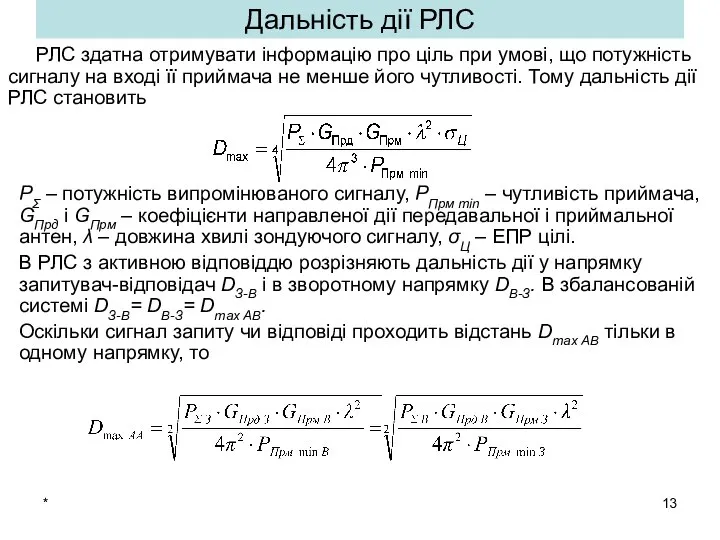
- 13. * Дальність дії РЛС РΣ – потужність випромінюваного сигналу, РПрм min – чутливість приймача, GПрд і
- 14. * Цілі поділяються на точкові (малих розмірів) і розподілені (великих розмірів). Точкові цілі створюють відбитий сигнал,
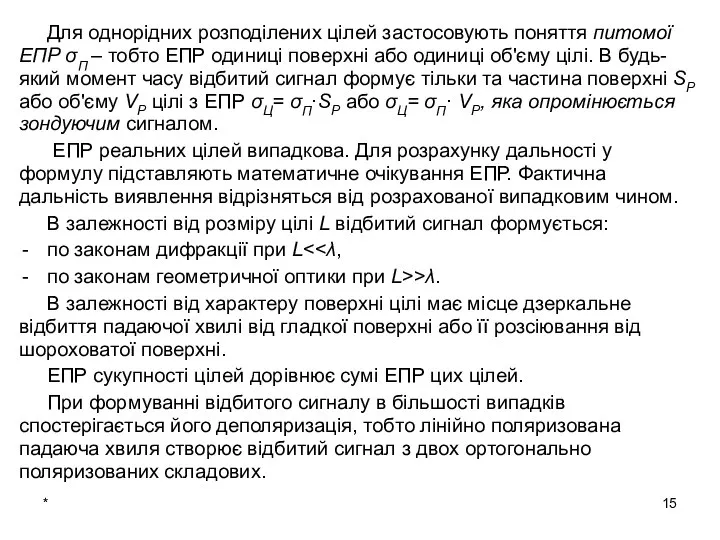
- 15. * Для однорідних розподілених цілей застосовують поняття питомої ЕПР σП – тобто ЕПР одиниці поверхні або
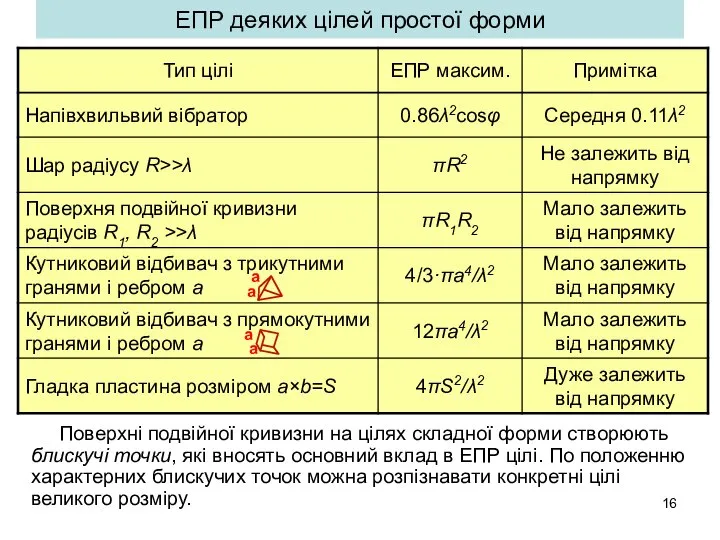
- 16. ЕПР деяких цілей простої форми Поверхні подвійної кривизни на цілях складної форми створюють блискучі точки, які
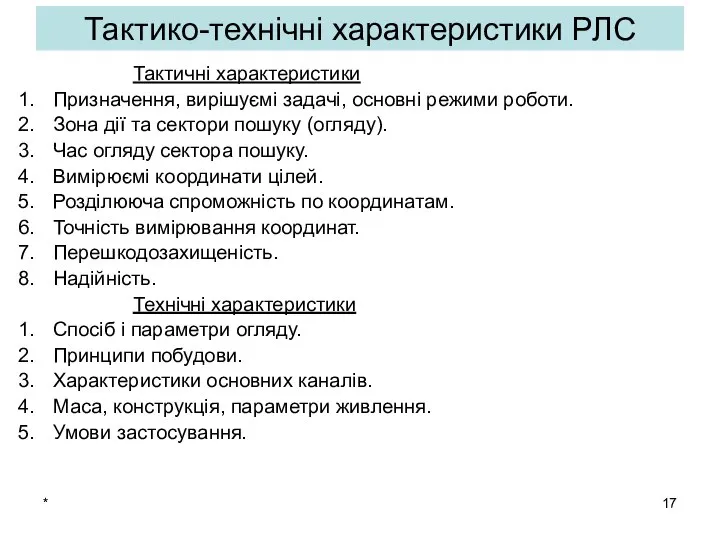
- 17. * Тактичні характеристики Призначення, вирішуємі задачі, основні режими роботи. Зона дії та сектори пошуку (огляду). Час
- 18. * Розповсюдження радіохвиль супроводжується їх ослабленням (через розсіювання та часткове поглинання середовищем) і затримкою внаслідок кінцевої
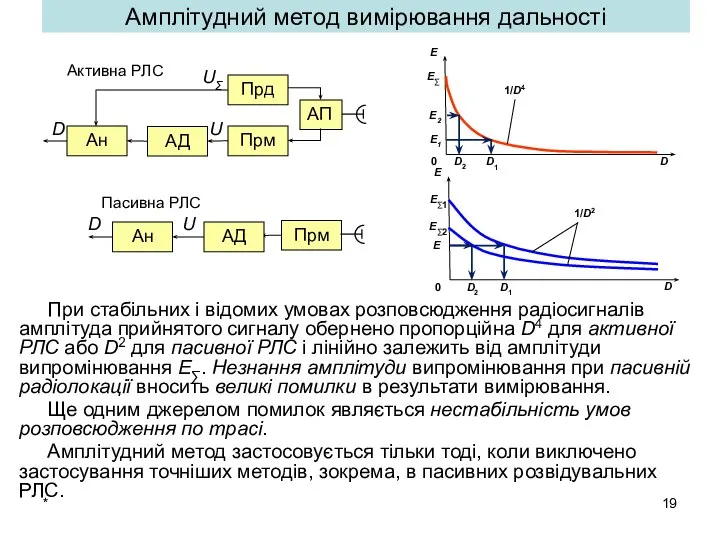
- 19. * При стабільних і відомих умовах розповсюдження радіосигналів амплітуда прийнятого сигналу обернено пропорційна D4 для активної
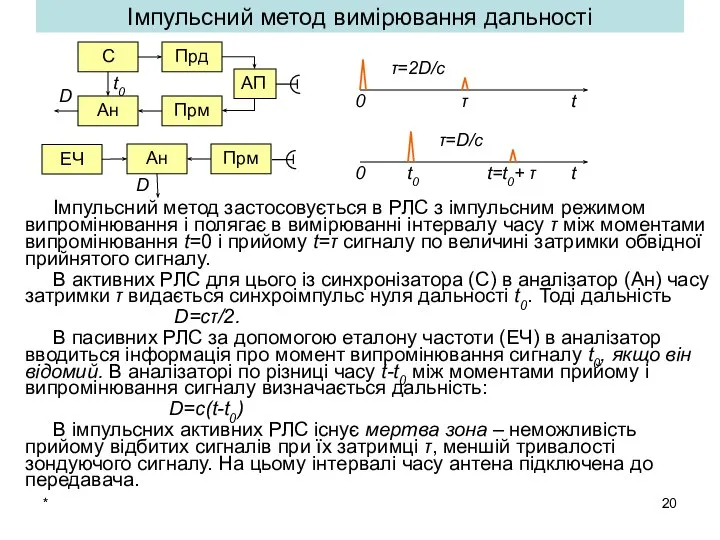
- 20. * Імпульсний метод вимірювання дальності Імпульсний метод застосовується в РЛС з імпульсним режимом випромінювання і полягає
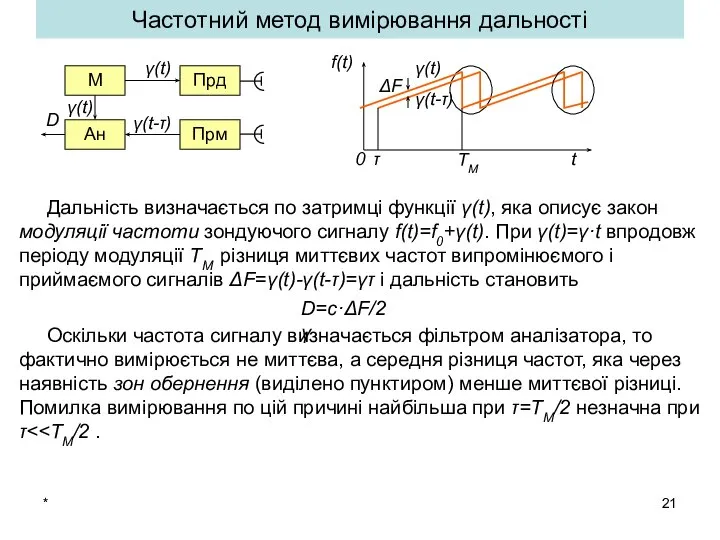
- 21. * Частотний метод вимірювання дальності Дальність визначається по затримці функції γ(t), яка описує закон модуляції частоти
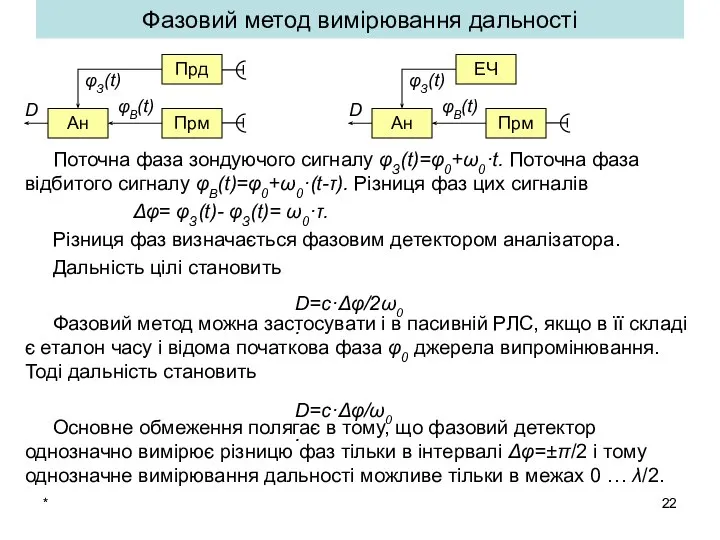
- 22. * Фазовий метод вимірювання дальності Поточна фаза зондуючого сигналу φЗ(t)=φ0+ω0·t. Поточна фаза відбитого сигналу φВ(t)=φ0+ω0·(t-τ). Різниця
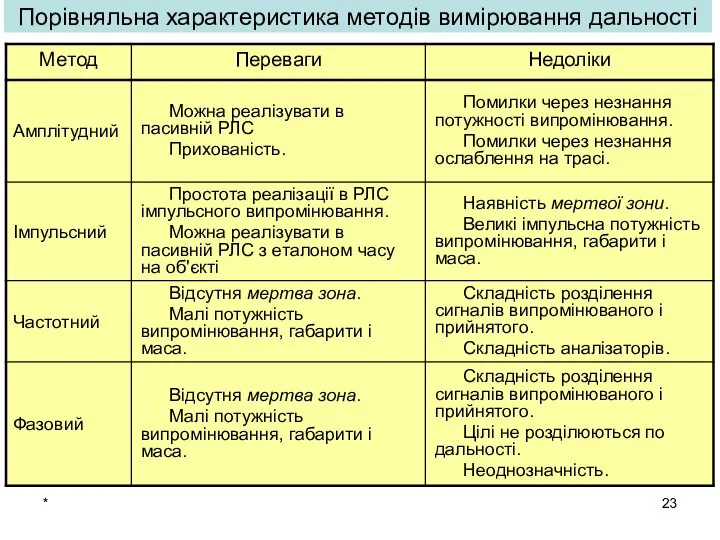
- 23. * Порівняльна характеристика методів вимірювання дальності
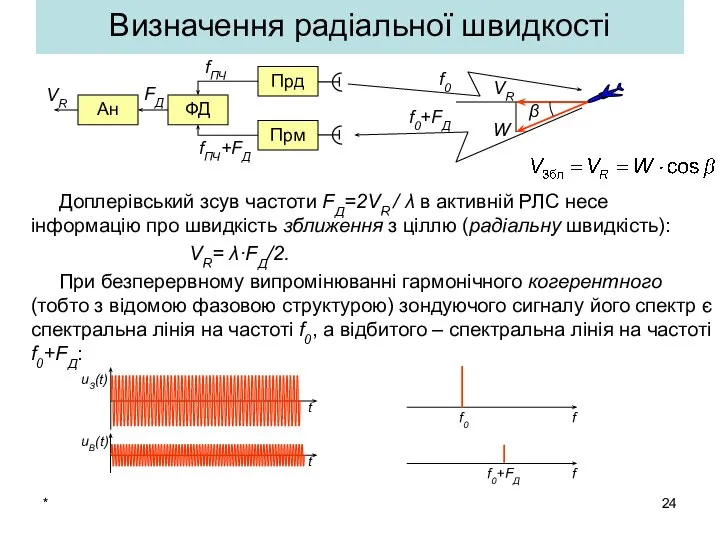
- 24. * Визначення радіальної швидкості Доплерівський зсув частоти FД=2VR / λ в активній РЛС несе інформацію про
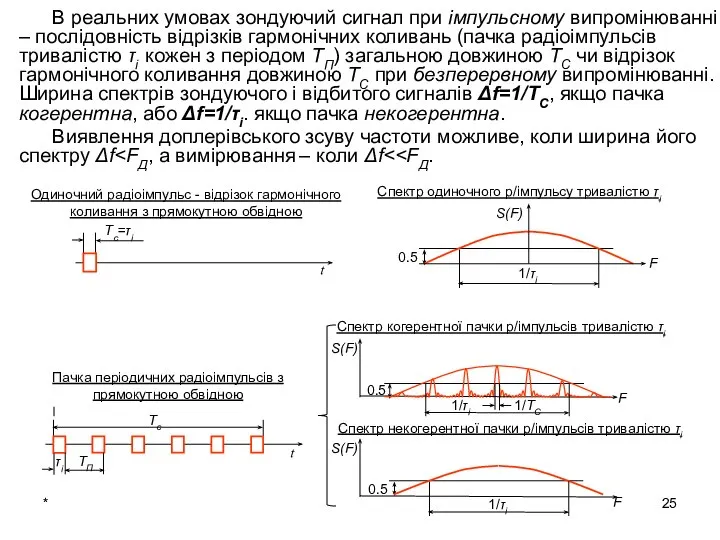
- 25. * В реальних умовах зондуючий сигнал при імпульсному випромінюванні – послідовність відрізків гармонічних коливань (пачка радіоімпульсів
- 26. * Визначення напрямку на джерело радіохвиль базується на припущенні, що в місці прийому фронт радіохвилі сферичний.
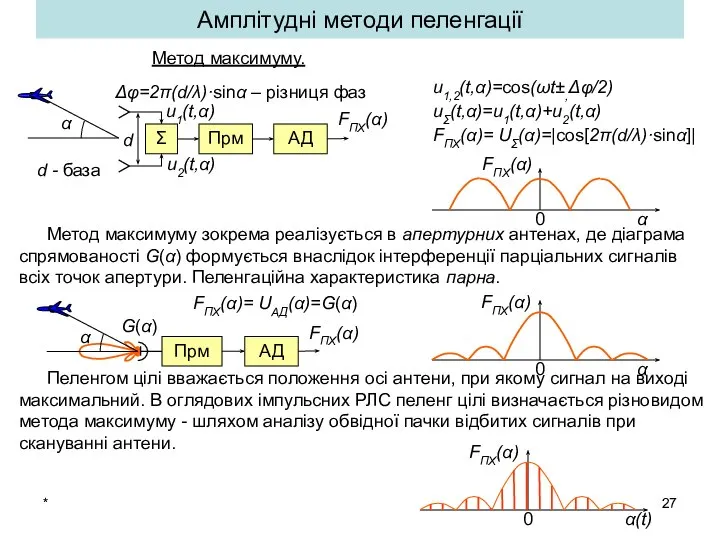
- 27. * Амплітудні методи пеленгації Метод максимуму. Метод максимуму зокрема реалізується в апертурних антенах, де діаграма спрямованості
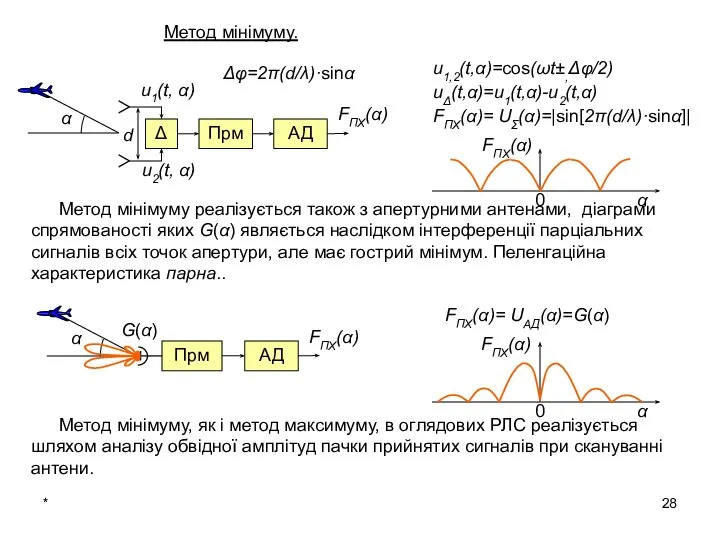
- 28. * Метод мінімуму. Метод мінімуму реалізується також з апертурними антенами, діаграми спрямованості яких G(α) являється наслідком
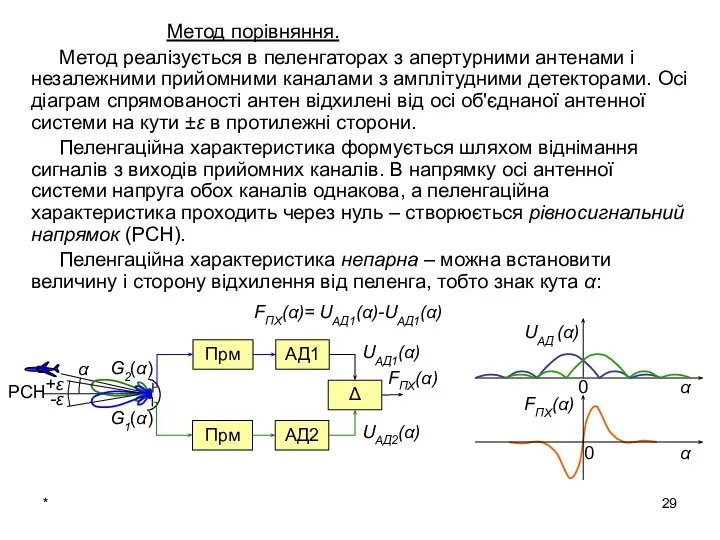
- 29. * Метод порівняння. Метод реалізується в пеленгаторах з апертурними антенами і незалежними прийомними каналами з амплітудними
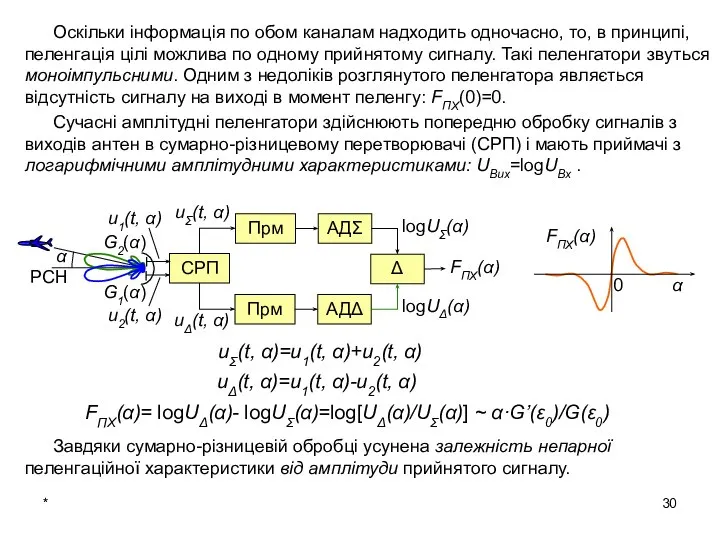
- 30. * Оскільки інформація по обом каналам надходить одночасно, то, в принципі, пеленгація цілі можлива по одному
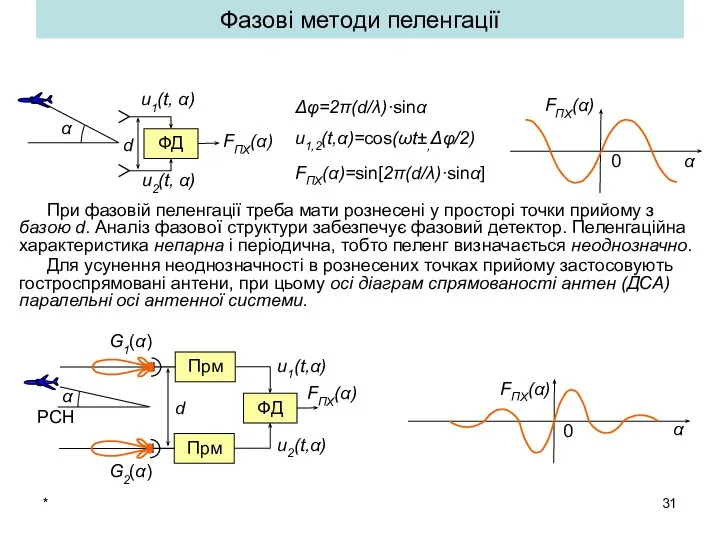
- 31. * При фазовій пеленгації треба мати рознесені у просторі точки прийому з базою d. Аналіз фазової
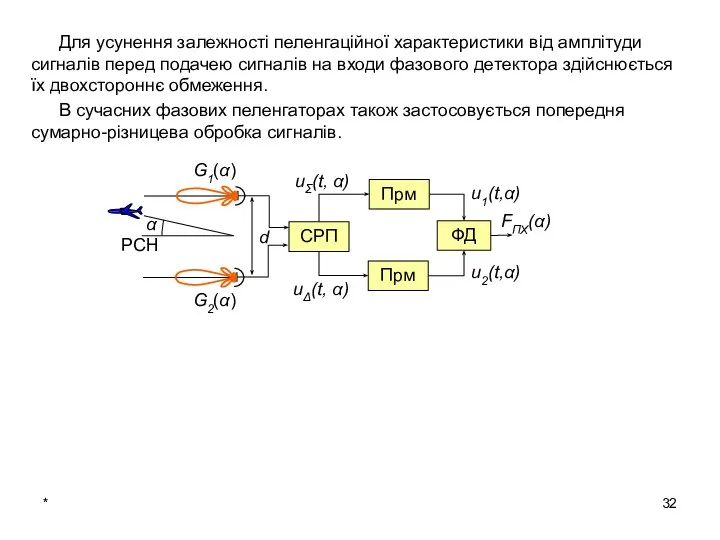
- 32. * Для усунення залежності пеленгаційної характеристики від амплітуди сигналів перед подачею сигналів на входи фазового детектора
- 33. * Питання для самоконтролю Основні терміни і поняття радіолокації. Активний метод радіолокації. Пасивний метод радіолокації. Напівактивний
- 35. Скачать презентацию
*
Розділ IV
“Експлуатація і ремонт радіоелектронного обладнання літаків, вертольотів та авіаційних ракет”
*
Розділ IV
“Експлуатація і ремонт радіоелектронного обладнання літаків, вертольотів та авіаційних ракет”
*
Принцип дії і характеристики РЛС.
Методи визначення координат цілей.
Навчальна та виховна мета
Ознайомити
*
Принцип дії і характеристики РЛС.
Методи визначення координат цілей.
Навчальна та виховна мета
Ознайомити
*
Контрольні завдання (ФО РЛ)
Поясніть, як співвідносяться ЕПР металевого шару з його
*
Контрольні завдання (ФО РЛ)
Поясніть, як співвідносяться ЕПР металевого шару з його
*
Загальні відомості про РЛС
Радіолокація – галузь радіотехніки, яка займається застосуванням електромагнітних
*
Загальні відомості про РЛС
Радіолокація – галузь радіотехніки, яка займається застосуванням електромагнітних

*
Технічний засіб, призначений для рішення задач радіолокації, зветься радіолокаційною станцією (РЛС)
*
Технічний засіб, призначений для рішення задач радіолокації, зветься радіолокаційною станцією (РЛС)
*
В авіації радіолокаційні станції застосовуються:
а) при рішенні задач безпеки польотів:
радіовисотоміри,
РЛС
*
В авіації радіолокаційні станції застосовуються:
а) при рішенні задач безпеки польотів:
радіовисотоміри,
РЛС
*
г) в системах та комплексах розвідки і радіоелектронної боротьби:
засоби попередження про
*
г) в системах та комплексах розвідки і радіоелектронної боротьби:
засоби попередження про
*
Принципи отримання інформації в РЛС
Активна РЛС включає прийомо-передавальний тракт (Прм, Прд),
*
Принципи отримання інформації в РЛС
Активна РЛС включає прийомо-передавальний тракт (Прм, Прд),
*
РЛС з активною відповіддю є система автоматичного обміну інформацією між запитувачем
*
РЛС з активною відповіддю є система автоматичного обміну інформацією між запитувачем
В залежності від способу розміщення апаратури РЛС ділять на однопозиційні і
В залежності від способу розміщення апаратури РЛС ділять на однопозиційні і
Ефективна поверхня розсіювання цілі
Ефективна поверхня розсіювання цілі (ЕПР), ефективна відбиваюча поверхня
Ефективна поверхня розсіювання цілі
Ефективна поверхня розсіювання цілі (ЕПР), ефективна відбиваюча поверхня
*
Дальність дії РЛС
РΣ – потужність випромінюваного сигналу, РПрм min – чутливість
*
Дальність дії РЛС
РΣ – потужність випромінюваного сигналу, РПрм min – чутливість
*
Цілі поділяються на точкові (малих розмірів) і розподілені (великих розмірів).
Точкові цілі
*
Цілі поділяються на точкові (малих розмірів) і розподілені (великих розмірів).
Точкові цілі
*
Для однорідних розподілених цілей застосовують поняття питомої ЕПР σП – тобто
*
Для однорідних розподілених цілей застосовують поняття питомої ЕПР σП – тобто
ЕПР деяких цілей простої форми
Поверхні подвійної кривизни на цілях складної форми
ЕПР деяких цілей простої форми
Поверхні подвійної кривизни на цілях складної форми
*
Тактичні характеристики
Призначення, вирішуємі задачі, основні режими роботи.
Зона дії та сектори пошуку
*
Тактичні характеристики
Призначення, вирішуємі задачі, основні режими роботи.
Зона дії та сектори пошуку
*
Розповсюдження радіохвиль супроводжується їх ослабленням (через розсіювання та часткове поглинання середовищем)
*
Розповсюдження радіохвиль супроводжується їх ослабленням (через розсіювання та часткове поглинання середовищем)
*
При стабільних і відомих умовах розповсюдження радіосигналів амплітуда прийнятого сигналу обернено
*
При стабільних і відомих умовах розповсюдження радіосигналів амплітуда прийнятого сигналу обернено
*
Імпульсний метод вимірювання дальності
Імпульсний метод застосовується в РЛС з імпульсним режимом
*
Імпульсний метод вимірювання дальності
Імпульсний метод застосовується в РЛС з імпульсним режимом
*
Частотний метод вимірювання дальності
Дальність визначається по затримці функції γ(t), яка описує
*
Частотний метод вимірювання дальності
Дальність визначається по затримці функції γ(t), яка описує
*
Фазовий метод вимірювання дальності
Поточна фаза зондуючого сигналу φЗ(t)=φ0+ω0·t. Поточна фаза відбитого
*
Фазовий метод вимірювання дальності
Поточна фаза зондуючого сигналу φЗ(t)=φ0+ω0·t. Поточна фаза відбитого
*
Порівняльна характеристика методів вимірювання дальності
*
Порівняльна характеристика методів вимірювання дальності
*
Визначення радіальної швидкості
Доплерівський зсув частоти FД=2VR / λ в активній
*
Визначення радіальної швидкості
Доплерівський зсув частоти FД=2VR / λ в активній
*
В реальних умовах зондуючий сигнал при імпульсному випромінюванні – послідовність
*
В реальних умовах зондуючий сигнал при імпульсному випромінюванні – послідовність
*
Визначення напрямку на джерело радіохвиль базується на припущенні, що в місці
*
Визначення напрямку на джерело радіохвиль базується на припущенні, що в місці
*
Амплітудні методи пеленгації
Метод максимуму.
Метод максимуму зокрема реалізується в апертурних антенах,
*
Амплітудні методи пеленгації
Метод максимуму.
Метод максимуму зокрема реалізується в апертурних антенах,
*
Метод мінімуму.
Метод мінімуму реалізується також з апертурними антенами, діаграми спрямованості
*
Метод мінімуму.
Метод мінімуму реалізується також з апертурними антенами, діаграми спрямованості
*
Метод порівняння.
Метод реалізується в пеленгаторах з апертурними антенами і незалежними
*
Метод порівняння.
Метод реалізується в пеленгаторах з апертурними антенами і незалежними
*
Оскільки інформація по обом каналам надходить одночасно, то, в принципі, пеленгація
*
Оскільки інформація по обом каналам надходить одночасно, то, в принципі, пеленгація
*
При фазовій пеленгації треба мати рознесені у просторі точки прийому з
*
При фазовій пеленгації треба мати рознесені у просторі точки прийому з
*
Для усунення залежності пеленгаційної характеристики від амплітуди сигналів перед подачею сигналів
*
Для усунення залежності пеленгаційної характеристики від амплітуди сигналів перед подачею сигналів
*
Питання для самоконтролю
Основні терміни і поняття радіолокації.
Активний метод радіолокації.
Пасивний метод
*
Питання для самоконтролю
Основні терміни і поняття радіолокації.
Активний метод радіолокації.
Пасивний метод
 Сердечная недостаточность
Сердечная недостаточность ГОС кредит
ГОС кредит Стереотип и дискриминация как формы межкультурного конфликта и пути их преодоления
Стереотип и дискриминация как формы межкультурного конфликта и пути их преодоления Концепции современного естествознания
Концепции современного естествознания Изображения - виды, разрезы, сечения
Изображения - виды, разрезы, сечения DeutschSprechen: Anfänger
DeutschSprechen: Anfänger Требования, предъявляемые к выбору каналов сбыта в международном маркетинге
Требования, предъявляемые к выбору каналов сбыта в международном маркетинге  Основы программирования
Основы программирования География в танце. (Часть 2)
География в танце. (Часть 2) Банковская система,ее структура и функции
Банковская система,ее структура и функции  Документационное обеспечение редакционно-издательской деятельности
Документационное обеспечение редакционно-издательской деятельности Нанотехнологии в электронике и технике
Нанотехнологии в электронике и технике Человек и его внутренний мир
Человек и его внутренний мир  Презентация "Символика Древнего Египта" - скачать презентации по МХК
Презентация "Символика Древнего Египта" - скачать презентации по МХК Поняття циклу. Оператори циклу. Виклик функції
Поняття циклу. Оператори циклу. Виклик функції Когда командует словарь
Когда командует словарь Хімія у вирішенні промислової проблеми
Хімія у вирішенні промислової проблеми Кинематика точки
Кинематика точки Грамматика, как раздел языкознания
Грамматика, как раздел языкознания Двигатели внутреннего сгорания. История науки и техники. Часть 3,
Двигатели внутреннего сгорания. История науки и техники. Часть 3, Проектный офис "Революция изнутри"
Проектный офис "Революция изнутри" Дифференцированное обучение учащихся с разной функциональной асимметрией полушарий
Дифференцированное обучение учащихся с разной функциональной асимметрией полушарий Аналитическое распределение бюджетных ассигнований по проектам государственных программ Российской Федерации
Аналитическое распределение бюджетных ассигнований по проектам государственных программ Российской Федерации 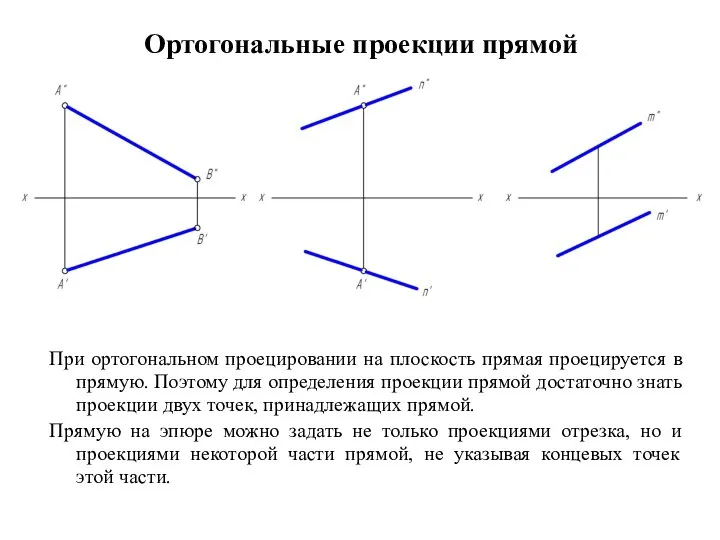 Ортогональные проекции прямой
Ортогональные проекции прямой Різдвяні традиції. Кутя
Різдвяні традиції. Кутя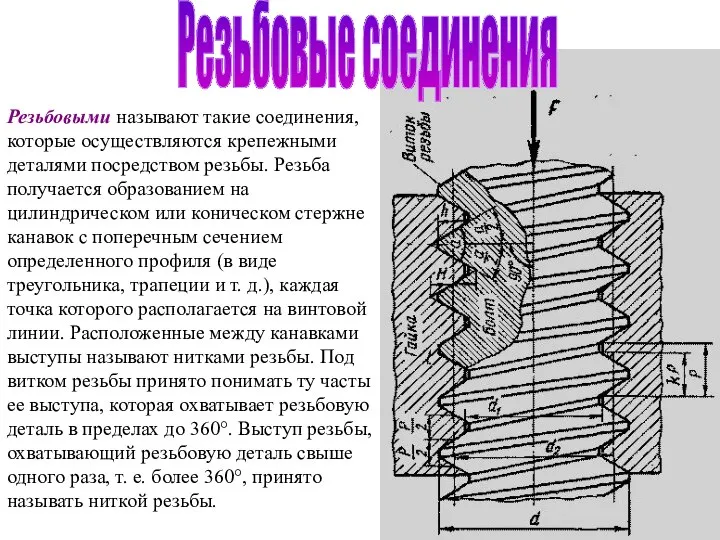 Резьбовые соединения
Резьбовые соединения Карта-схема закрепленной территории за структурными подразделениями 1-ой площадки
Карта-схема закрепленной территории за структурными подразделениями 1-ой площадки Биохимия
Биохимия