- Элементы аналитической механики

Содержание
- 2. Связи записываются в виде уравнений или неравенств. Конструктивно связи могут быть выполнены в виде шарниров, стержней,
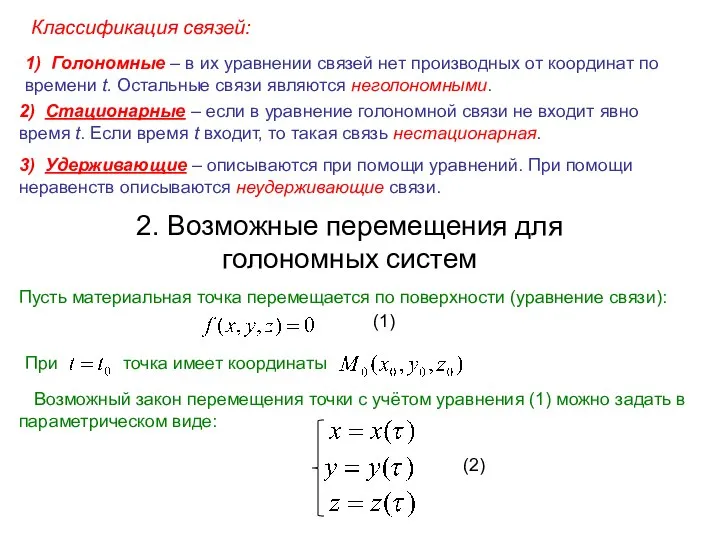
- 3. Классификация связей: 1) Голономные – в их уравнении связей нет производных от координат по времени t.
- 4. Где – некоторый параметр. Функции (2) должны обращать уравнение (1) в тождество по параметру : (3)
- 5. Этот вектор направлен по касательной к кинематически возможной траектории точки М. Уравнение (5) можно записать в
- 6. Но свойства действительных перемещений в нестационарных связях существенно различны. При истинном движении точки по нестационарной связи
- 7. ! Очевидно, что если , то 4. Идеальные связи Связи называются идеальными, если возможная работа реакций
- 8. Но если все связи идеальные, то второе слагаемое равно нулю, тогда - принцип возможных перемещений Это
- 10. Скачать презентацию

Связи записываются в виде уравнений или неравенств. Конструктивно связи могут
Связи записываются в виде уравнений или неравенств. Конструктивно связи могут
Классификация связей:
1) Голономные – в их уравнении связей нет производных
Классификация связей:
1) Голономные – в их уравнении связей нет производных
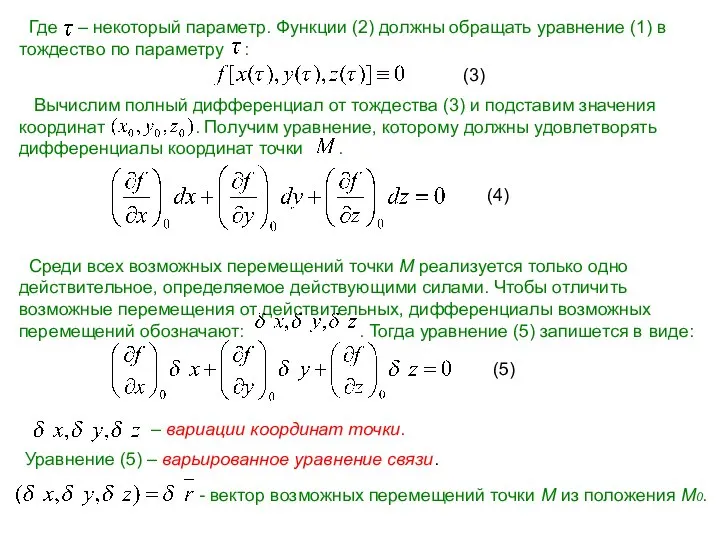
Где – некоторый параметр. Функции (2) должны обращать уравнение (1)
Где – некоторый параметр. Функции (2) должны обращать уравнение (1)
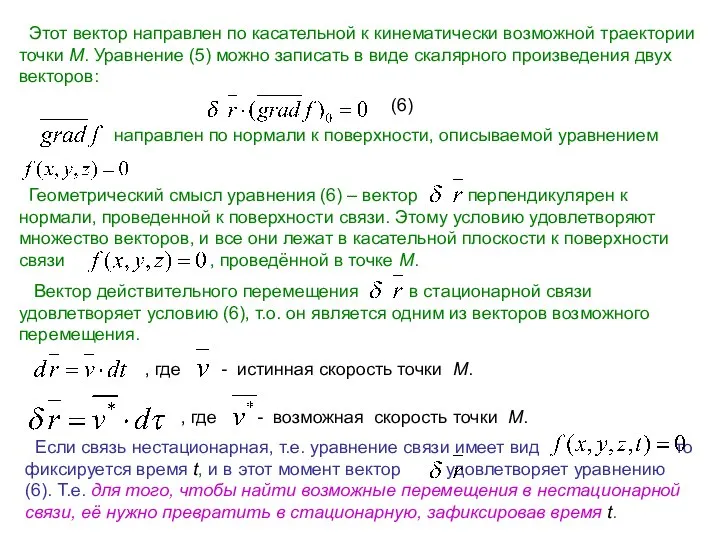
Этот вектор направлен по касательной к кинематически возможной траектории точки
Этот вектор направлен по касательной к кинематически возможной траектории точки
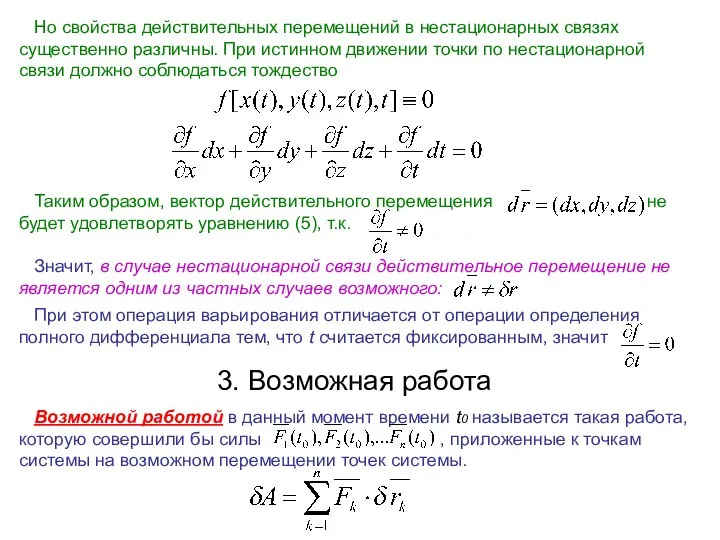
Но свойства действительных перемещений в нестационарных связях существенно различны. При
Но свойства действительных перемещений в нестационарных связях существенно различны. При
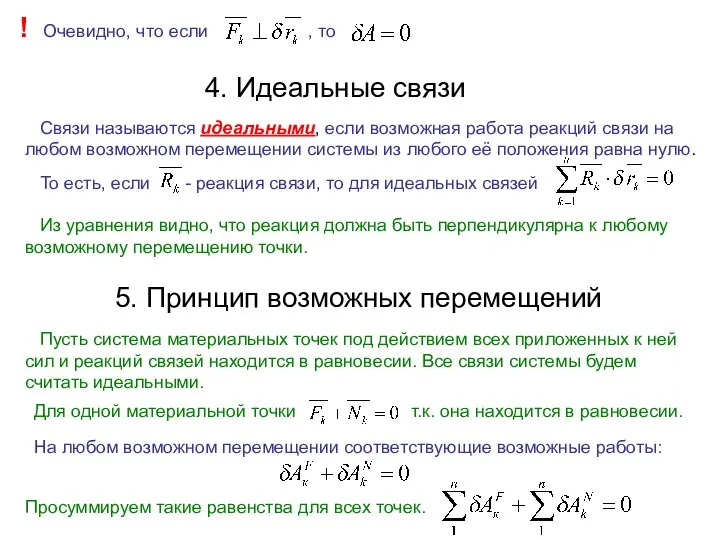
! Очевидно, что если , то
4. Идеальные связи
Связи
! Очевидно, что если , то
4. Идеальные связи
Связи
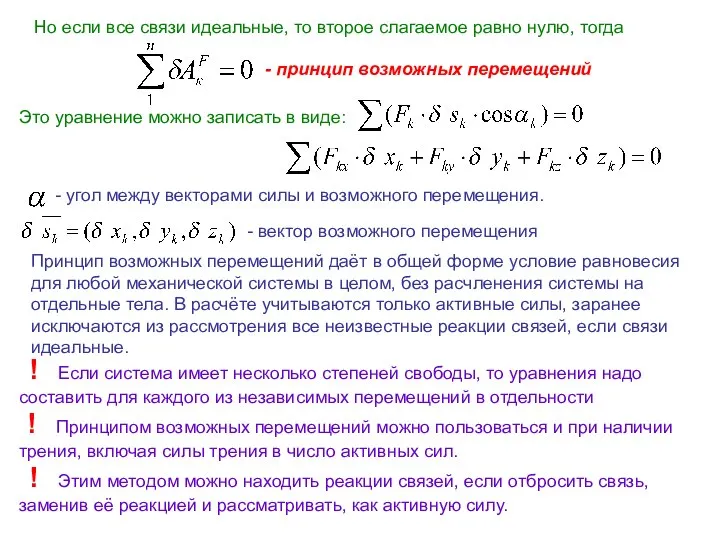
Но если все связи идеальные, то второе слагаемое равно нулю,
Но если все связи идеальные, то второе слагаемое равно нулю,
 Достопримечальности Киева
Достопримечальности Киева Шестипульсовая нулевая схема «Звезда – две взаимообратных звезды с уравнительным реактором (УР)
Шестипульсовая нулевая схема «Звезда – две взаимообратных звезды с уравнительным реактором (УР) Особенности национального костюма
Особенности национального костюма Управление рисками как система менеджмента
Управление рисками как система менеджмента Половые железы
Половые железы Поведение
Поведение Всероссийский финал общероссийского проекта «Мини-футбол – в школу»
Всероссийский финал общероссийского проекта «Мини-футбол – в школу»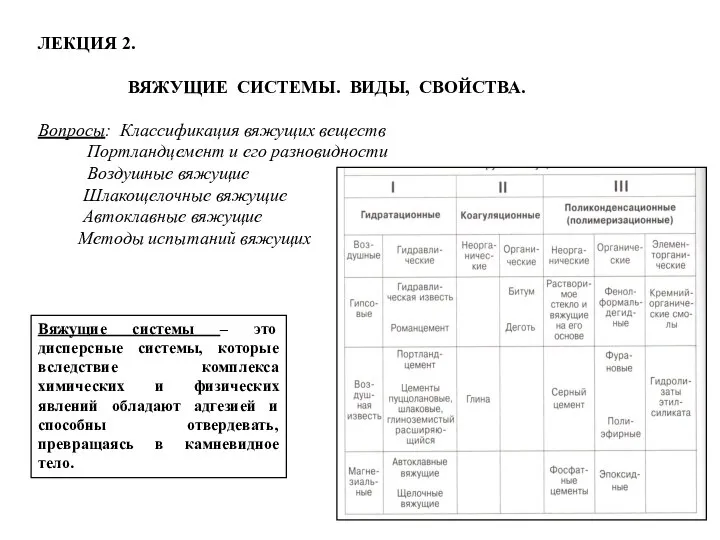 ВЯЖУЩИЕ СИСТЕМЫ. ВИДЫ, СВОЙСТВА.
ВЯЖУЩИЕ СИСТЕМЫ. ВИДЫ, СВОЙСТВА. Защита трудовых прав
Защита трудовых прав Презентация "РУССКИЙ БАЛЕТ" - скачать презентации по МХК
Презентация "РУССКИЙ БАЛЕТ" - скачать презентации по МХК Транснациональные корпорации как субъект мировой экономики и международного бизнеса
Транснациональные корпорации как субъект мировой экономики и международного бизнеса  Выносливость и основы методики ее развития
Выносливость и основы методики ее развития Прихват бурильной колонны и методы борьбы с ним. Семинар 12
Прихват бурильной колонны и методы борьбы с ним. Семинар 12 Исследовательская работа по теме: «Кошачье счастье». Выполнила: ученица 1«А» класса МОУ АСОШ№1 им. П.К.Коршунова
Исследовательская работа по теме: «Кошачье счастье». Выполнила: ученица 1«А» класса МОУ АСОШ№1 им. П.К.Коршунова  Альтерглобализм та його форми
Альтерглобализм та його форми Электрические коммутационные контактные аппараты ручного управления. Рубильники и пускатели
Электрические коммутационные контактные аппараты ручного управления. Рубильники и пускатели Объектно-ориентированный анализ
Объектно-ориентированный анализ Информационные технологии в психологии 5
Информационные технологии в психологии 5 Гроші. Різновиди грошей. Валюта. Курс валюти.
Гроші. Різновиди грошей. Валюта. Курс валюти.  Падежи в немецком языке
Падежи в немецком языке Модель биржевого робота «как есть
Модель биржевого робота «как есть Устройство компьютера (СС)
Устройство компьютера (СС) Бойове застосування КЗА 86Ж6. Взаємодія оператора з cпецобчислювачем. (Тема 8.5)
Бойове застосування КЗА 86Ж6. Взаємодія оператора з cпецобчислювачем. (Тема 8.5) ДИДАКТИКА СОВРЕМЕННОГО УРОКА
ДИДАКТИКА СОВРЕМЕННОГО УРОКА Задачи 44-48 по инженерной графике
Задачи 44-48 по инженерной графике Development and Simulation
Development and Simulation Изучение методов спиндтокторинга в формировании повестки дня
Изучение методов спиндтокторинга в формировании повестки дня Школьникам о коррупции
Школьникам о коррупции