- Эвольвентные поверхности. Основы теории режущих инструментов

Содержание
- 2. Эвольвентные поверхности в деталях машин Прямозубые – Эвольвентная цилиндрическая поверхность Цилиндрические зубчатые колеса Косозубые – Эвольвентная
- 3. Эвольвента окружности Эвольвента окружности представляет собой траекторию любой точки прямой линии, перекатываемой по окружности без скольжения;
- 4. Образование эвольвенты окружности
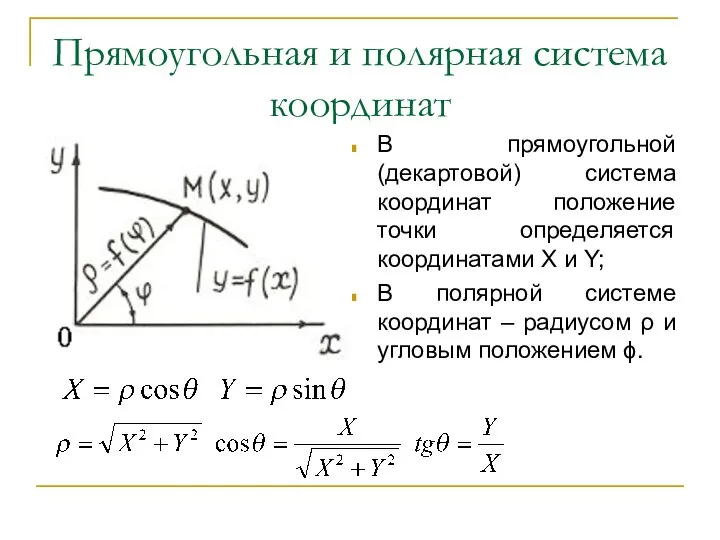
- 5. Прямоугольная и полярная система координат В прямоугольной (декартовой) система координат положение точки определяется координатами X и
- 6. Уравнение эвольвенты в полярной системе координат ОМ0 – соответствует началу угловой координат; ρ – радиус текущей
- 7. Уравнения эвольвенты окружности В параметрическом виде уравнения эвольвенты окружности выглядят следующим образом: rb – радиус основной
- 8. Эвольвентная цилиндрическая поверхность П – плоскость поперечного сечения основного цилиндра К – плоскость, касательная к основному
- 9. Эвольвентная винтовая поверхность τ - угол подъема винтовой линии на основном цилиндре; σ - угол наклона
- 10. Эвольвентная коническая поверхность К – плоскость, касательная к основному конусу; АВ – образующая прямая; Точка на
- 11. Преобразование систем координат Все формулы преобразования систем координат основаны на переносе начала координат и повороте осей;
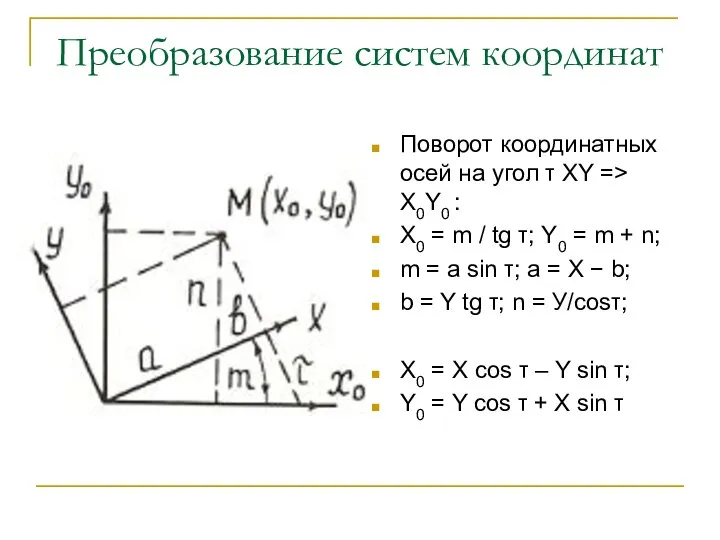
- 12. Преобразование систем координат Поворот координатных осей на угол τ XY => X0Y0 : Х0 = m
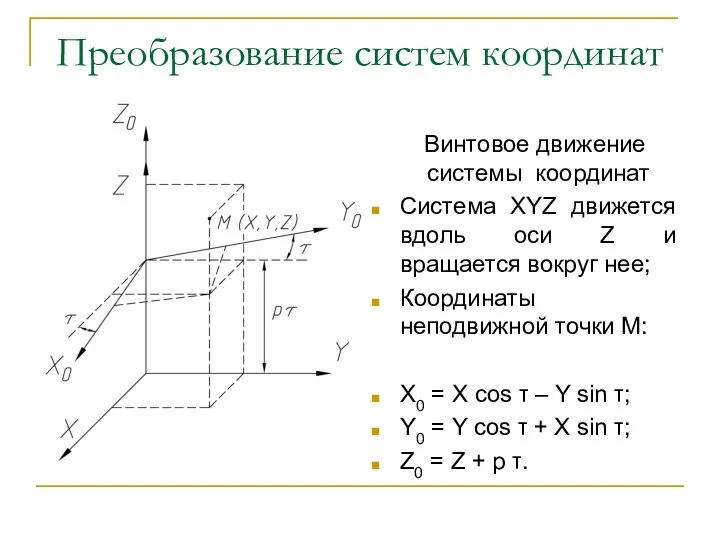
- 13. Преобразование систем координат Винтовое движение системы координат Система XYZ движется вдоль оси Z и вращается вокруг
- 15. Скачать презентацию

Эвольвентные поверхности в деталях машин
Прямозубые – Эвольвентная
цилиндрическая поверхность
Цилиндрические зубчатые колеса
Косозубые
Эвольвентные поверхности в деталях машин
Прямозубые – Эвольвентная
цилиндрическая поверхность
Цилиндрические зубчатые колеса
Косозубые

Эвольвента окружности
Эвольвента окружности представляет собой траекторию любой точки прямой линии, перекатываемой по
Эвольвента окружности
Эвольвента окружности представляет собой траекторию любой точки прямой линии, перекатываемой по
Образование эвольвенты окружности
Образование эвольвенты окружности
Прямоугольная и полярная система координат
В прямоугольной (декартовой) система координат положение точки
Прямоугольная и полярная система координат
В прямоугольной (декартовой) система координат положение точки
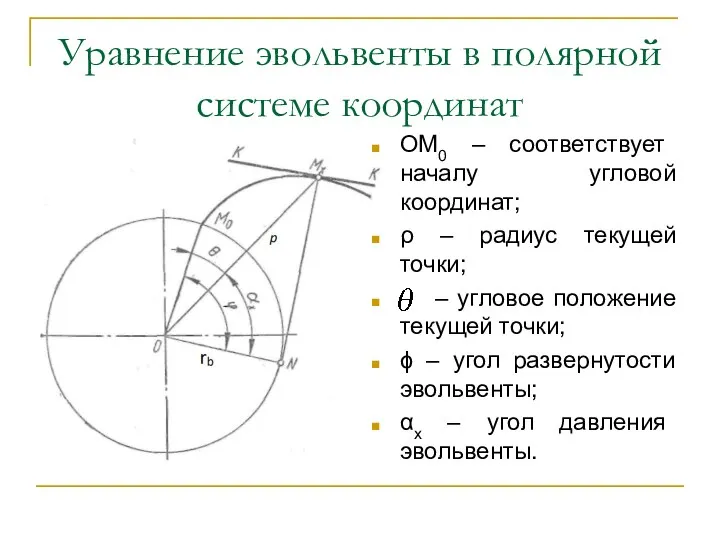
Уравнение эвольвенты в полярной системе координат
ОМ0 – соответствует началу угловой координат;
ρ
Уравнение эвольвенты в полярной системе координат
ОМ0 – соответствует началу угловой координат;
ρ
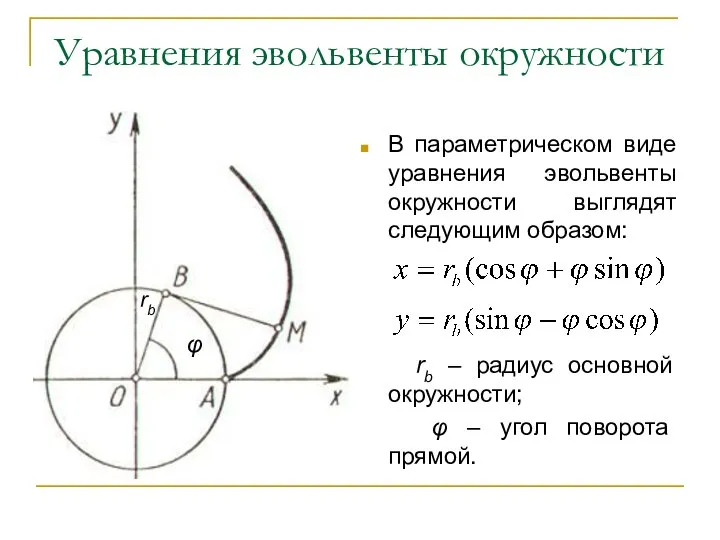
Уравнения эвольвенты окружности
В параметрическом виде уравнения эвольвенты окружности выглядят следующим образом:
rb
Уравнения эвольвенты окружности
В параметрическом виде уравнения эвольвенты окружности выглядят следующим образом:
rb
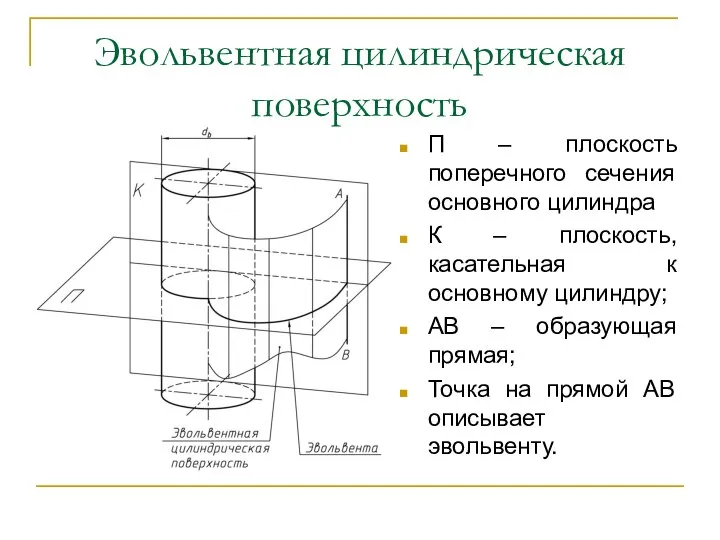
Эвольвентная цилиндрическая поверхность
П – плоскость поперечного сечения основного цилиндра
К – плоскость,
Эвольвентная цилиндрическая поверхность
П – плоскость поперечного сечения основного цилиндра
К – плоскость,
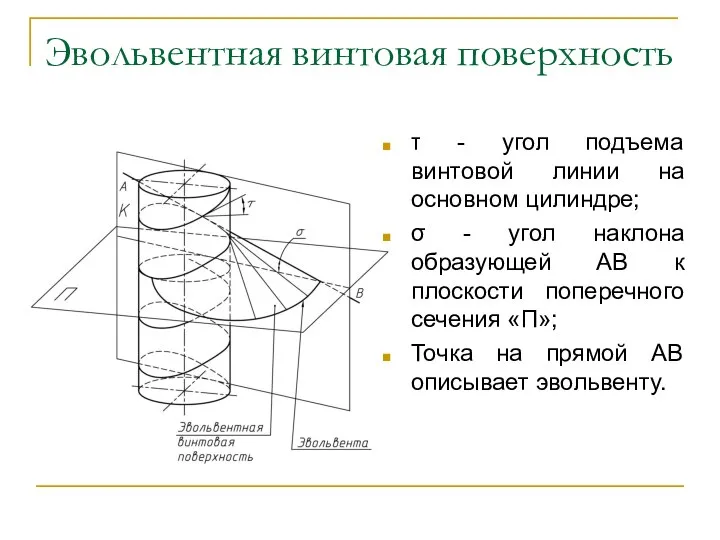
Эвольвентная винтовая поверхность
τ - угол подъема винтовой линии на основном цилиндре;
σ
Эвольвентная винтовая поверхность
τ - угол подъема винтовой линии на основном цилиндре;
σ
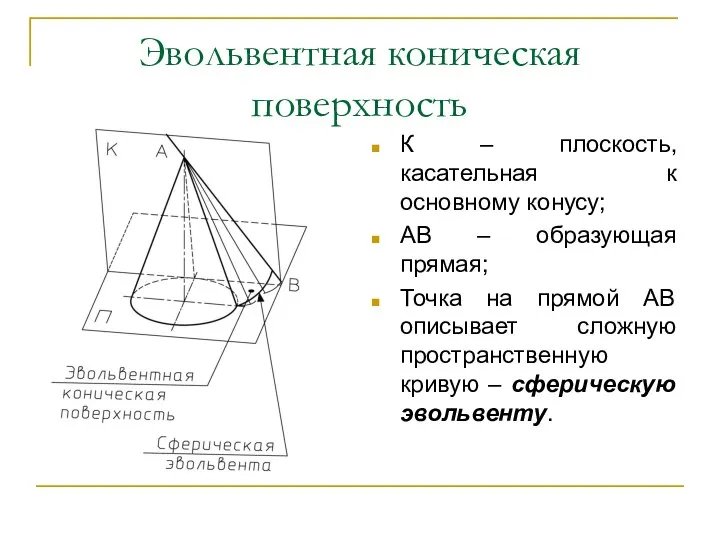
Эвольвентная коническая поверхность
К – плоскость, касательная к основному конусу;
АВ – образующая
Эвольвентная коническая поверхность
К – плоскость, касательная к основному конусу;
АВ – образующая
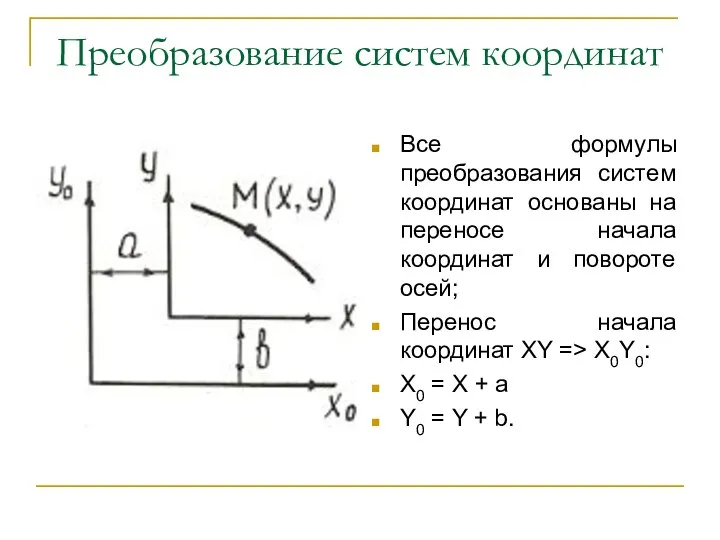
Преобразование систем координат
Все формулы преобразования систем координат основаны на переносе начала
Преобразование систем координат
Все формулы преобразования систем координат основаны на переносе начала
Преобразование систем координат
Поворот координатных осей на угол τ XY => X0Y0
Преобразование систем координат
Поворот координатных осей на угол τ XY => X0Y0
Преобразование систем координат
Винтовое движение системы координат
Система XYZ движется вдоль оси
Преобразование систем координат
Винтовое движение системы координат
Система XYZ движется вдоль оси
 косвенные налоги
косвенные налоги  Пересмотр вступивших в законную силу судебных решений
Пересмотр вступивших в законную силу судебных решений Дауыссыз дыбыстар
Дауыссыз дыбыстар Финансовая отчетность банка ВТБ Петрова Маргарита Куркина анна 3 курс фм
Финансовая отчетность банка ВТБ Петрова Маргарита Куркина анна 3 курс фм Каменные стены МКД
Каменные стены МКД Физиология заднего мозга
Физиология заднего мозга Искусство Древней Греции Афинский Акрополь
Искусство Древней Греции Афинский Акрополь Структура и типология культуры
Структура и типология культуры Ярмарка талантов. Российское движение школьников
Ярмарка талантов. Российское движение школьников Весёлые задачки - презентация для начальной школы_
Весёлые задачки - презентация для начальной школы_ Системы Счисления
Системы Счисления Описание слайда:
Модели поведения человека в институциональной экономике
Описание слайда:
Модели поведения человека в институциональной экономике Плавкие предохранители
Плавкие предохранители Семиотика и синдромология болезней крови. Геморраг. диатезы, лейкозы
Семиотика и синдромология болезней крови. Геморраг. диатезы, лейкозы Nikolay Vasilievich Sklifosovsky
Nikolay Vasilievich Sklifosovsky Паллиативная медицинская помощь в Российской Федерации. Изменения законодательства
Паллиативная медицинская помощь в Российской Федерации. Изменения законодательства Ранние формы религии. Часть III
Ранние формы религии. Часть III «Условия применения компьютерных программ в начальной школе» "Скажи мне, и я забуду. Покажи мне, - я см
«Условия применения компьютерных программ в начальной школе» "Скажи мне, и я забуду. Покажи мне, - я см История развития самбо
История развития самбо Презентация Целеполагание
Презентация Целеполагание Таможенная флотилия в современных условиях Подготовила студентка ФТД-1, группы Т-102 Телкова Алина
Таможенная флотилия в современных условиях Подготовила студентка ФТД-1, группы Т-102 Телкова Алина Рычаги в технике, быту и природе
Рычаги в технике, быту и природе Тектоника
Тектоника Правовое государство
Правовое государство Имя прилагательное как часть речи. Правописание прилагательных.
Имя прилагательное как часть речи. Правописание прилагательных. Вакуумный экскаватор
Вакуумный экскаватор Медицина в эпоху возрождения Выполнил:студент гр.102 стом. фак. Пеньковский Б.Г.
Медицина в эпоху возрождения Выполнил:студент гр.102 стом. фак. Пеньковский Б.Г.  черно-белые - презентация для начальной школы
черно-белые - презентация для начальной школы