- Функциональные измерительные преобразователи

Содержание
- 2. 3.1 Общие сведения, классификация Измерительный преобразователь (ИП) – это устройство, обеспечивающее преобразование вида представления измерительной информации
- 3. По назначению ИП различают: первичные ИП (ПИП), вторичные ИП (ВИП), нормирующие ИП (НП), масштабирующие ИП (МП).
- 4. Типовая структура измерительного канала На рисунке изображены основные измерительные преобразования. Рассмотрим подробнее их характеристики. Физический процесс
- 5. Аналоговые ИП Вторичный измерительный преобразователь (ВИП) - ИП, который служит для преобразования измерительного сигнала из одного
- 6. Характеристика аналоговых ИП Примерами аналоговых измерительных преобразователей могут служить: RT F1 = RT(T) R Rmax Rmin
- 7. Гибридные ИП Аналого-цифровой преобразователь (АЦП)– ВИП, который служит для преобразования измерительного сигнала из аналогового вида представления
- 8. Цифровые ИП Примерами цифровых измерительных преобразователей могут служить: Цифровой измерительный преобразователь (ЦИП) Масштабирующий ИП – ВИП,
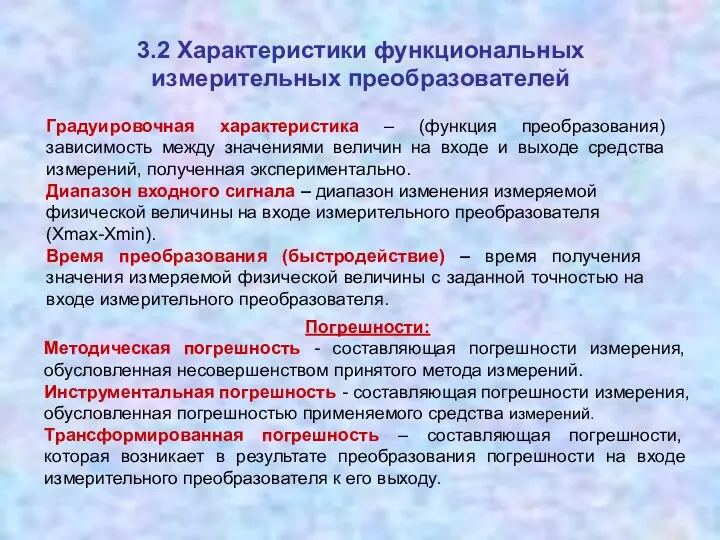
- 9. 3.2 Характеристики функциональных измерительных преобразователей Градуировочная характеристика – (функция преобразования) зависимость между значениями величин на входе
- 10. Суммарная погрешность на выходе процедуры R2 складывается из собственной погрешности и погрешности реализации предыдущей части алгоритма,
- 11. 3.3 Функциональные измерительные преобразователи с дискретно управляемыми параметрами Любой ИП имеет заданную функцию преобразования. В настоящем
- 12. Схема дискретно управляемого сопротивления – RN представлена на рис. Значение сопротивления равно: RN = r•N =
- 13. Схема дискретно управляемого конденсатора – СN представлена на рис. Значение емкости равно: СN = с•N =
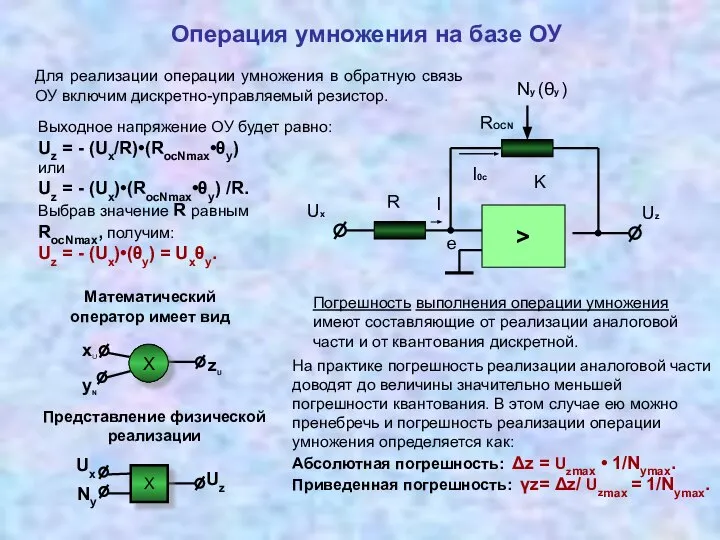
- 14. 3.4 Измерительные преобразователи, реализующие операции умножения, деления Операция умножения на базе ЦАП с постоянным входным сопротивлением
- 15. RN = r•Ny; = r•Ny, RN Операция умножения на базе ЦАП с постоянным входным сопротивлением Uz
- 16. Операция умножения на базе ЦАП с постоянным выходным сопротивлением Схема организована так, что при разомкнутом ключе
- 17. Операция умножения на базе ЦАП с постоянным выходным сопротивлением Если значение разряда «1», ключ подключен к
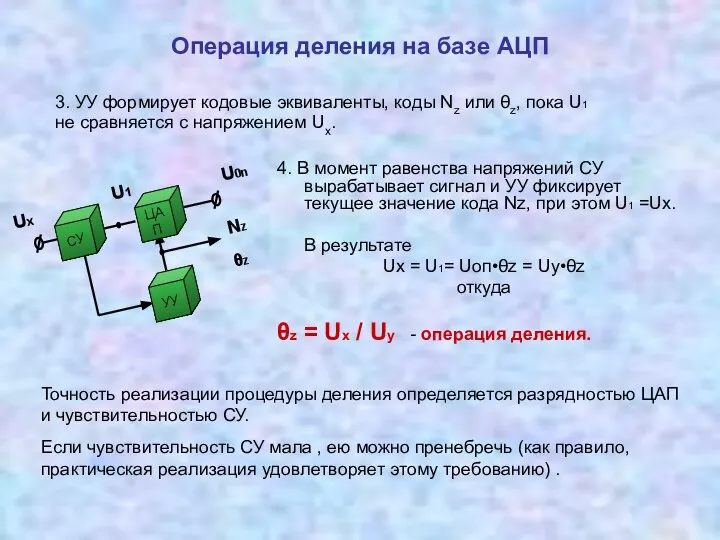
- 18. Операция деления на базе АЦП СУ – сравнивающее устройство УУ – устройство управления Uоп – опорное
- 19. Операция деления на базе АЦП 4. В момент равенства напряжений СУ вырабатывает сигнал и УУ фиксирует
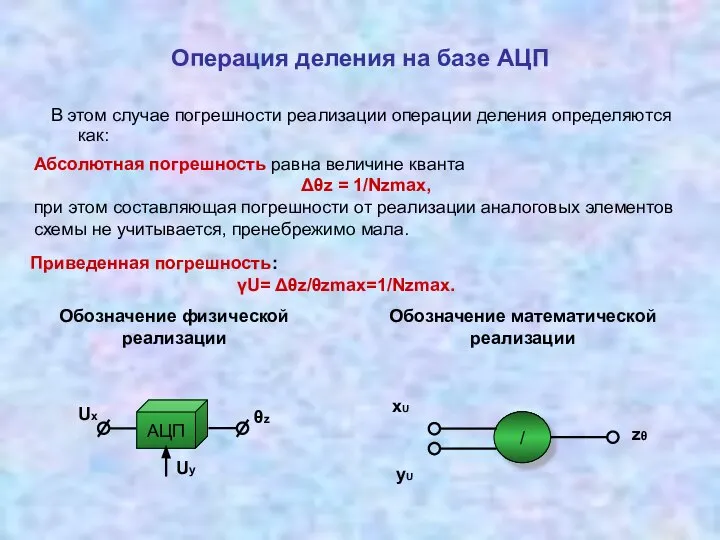
- 20. Операция деления на базе АЦП В этом случае погрешности реализации операции деления определяются как: Обозначение физической
- 21. При этом поддерживается равенство токов: I = I0c или Ux/R = - Uz/Rоc, откуда: Uz =
- 22. Выходное напряжение ОУ будет равно: Uz = - (Ux/R)•(RосNmax•θy) или Uz = - (Ux)•(RосNmax•θy) /R. Выбрав
- 23. Выходное напряжение ОУ будет равно: Uz = (Ux/RNmax •θy)•(Rос) или Uz = (Ux)•(Rос) /R Nmax•θy. Выбрав
- 24. Ux1 Uz θy1 I1 R1N θy2 Rоc = R2N Iоc e K R3N I3 Ux2 θy3
- 25. Операция интегрирования на базе ОУ Напряжение на выходе равно Uz =α(1/RN)•(1/jωCN0c )•∫Ux(t)dt, где α – коэффициент
- 26. 3.5 Соотношение между уравнением измерений и физической реализацией измерительных преобразований Измерительный канал (ИК) представляет собой последовательность
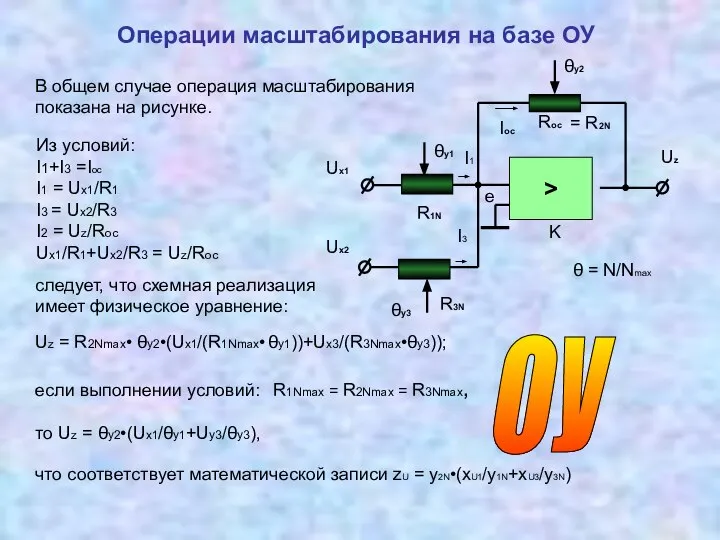
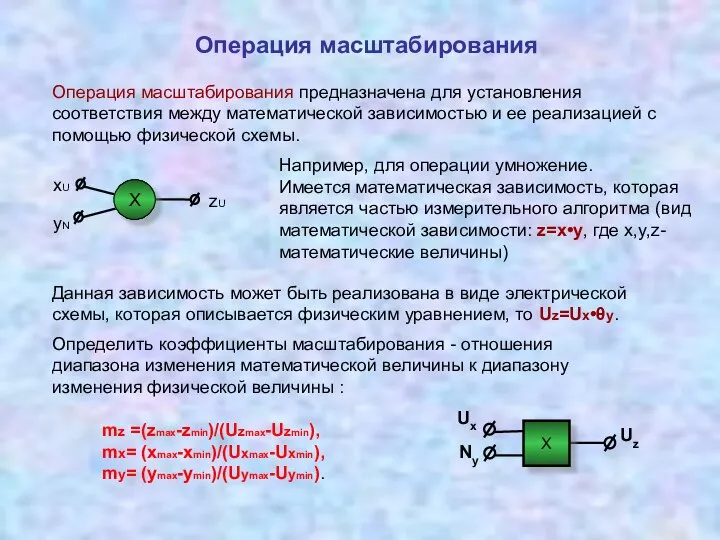
- 27. Операция масштабирования Операция масштабирования предназначена для установления соответствия между математической зависимостью и ее реализацией с помощью
- 28. Коэффициент масштабирования. Масштабное уравнение. zU=mz•Uz; Uz=zU/mz; xU=mx•Ux; или Ux=xU/mx; yθ=my•θy; Uy= yθ/my; Тогда подставим значения физических
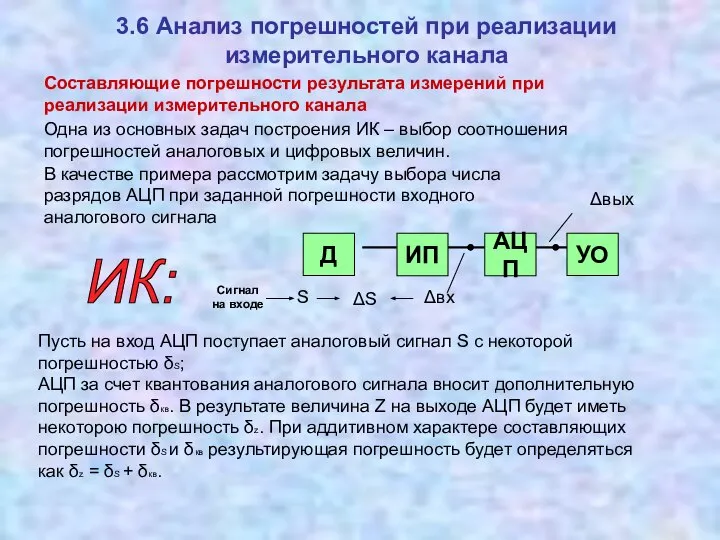
- 29. 3.6 Анализ погрешностей при реализации измерительного канала Составляющие погрешности результата измерений при реализации измерительного канала Одна
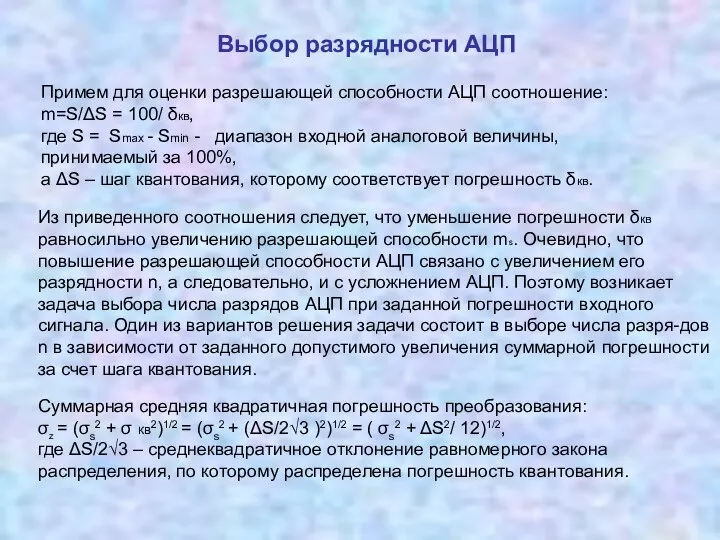
- 30. Выбор разрядности АЦП Примем для оценки разрешающей способности АЦП соотношение: m=S/ΔS = 100/ δкв, где S
- 32. Скачать презентацию

3.1 Общие сведения, классификация
Измерительный преобразователь (ИП) – это устройство, обеспечивающее преобразование
3.1 Общие сведения, классификация
Измерительный преобразователь (ИП) – это устройство, обеспечивающее преобразование

По назначению ИП различают: первичные ИП (ПИП), вторичные ИП (ВИП), нормирующие
По назначению ИП различают: первичные ИП (ПИП), вторичные ИП (ВИП), нормирующие
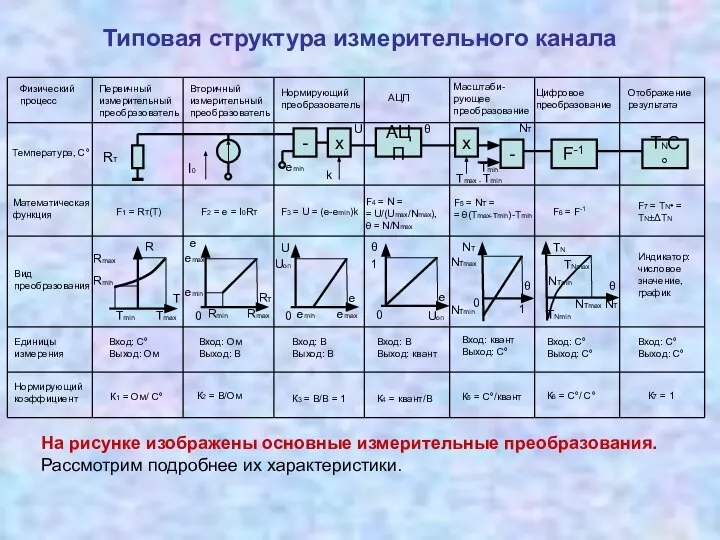
Типовая структура измерительного канала
На рисунке изображены основные измерительные преобразования. Рассмотрим подробнее
Типовая структура измерительного канала
На рисунке изображены основные измерительные преобразования. Рассмотрим подробнее

Аналоговые ИП
Вторичный измерительный преобразователь (ВИП) -
ИП, который служит для преобразования
измерительного
Аналоговые ИП
Вторичный измерительный преобразователь (ВИП) -
ИП, который служит для преобразования
измерительного

Характеристика аналоговых ИП
Примерами аналоговых измерительных преобразователей могут служить:
RT
F1 = RT(T)
R
Rmax
Rmin
T
Tmin
Tmax
Первичный
Характеристика аналоговых ИП
Примерами аналоговых измерительных преобразователей могут служить:
RT
F1 = RT(T)
R
Rmax
Rmin
T
Tmin
Tmax
Первичный

Гибридные ИП
Аналого-цифровой преобразователь (АЦП)– ВИП, который служит для преобразования измерительного сигнала
Гибридные ИП
Аналого-цифровой преобразователь (АЦП)– ВИП, который служит для преобразования измерительного сигнала
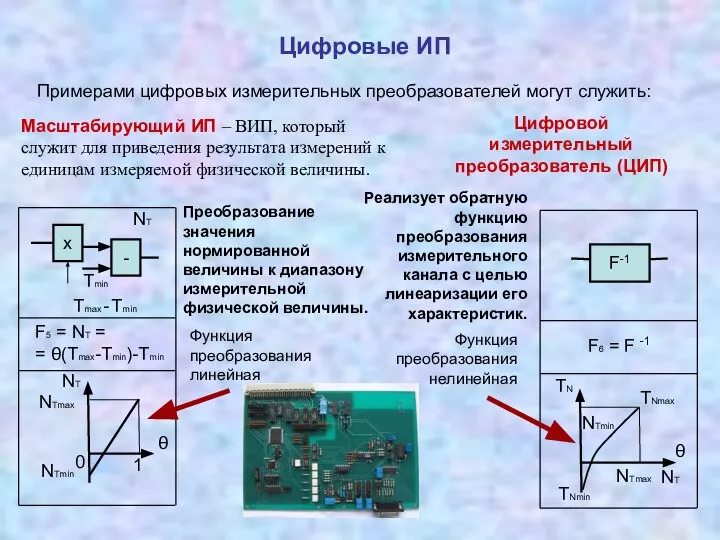
Цифровые ИП
Примерами цифровых измерительных преобразователей могут служить:
Цифровой измерительный
преобразователь
Цифровые ИП
Примерами цифровых измерительных преобразователей могут служить:
Цифровой измерительный
преобразователь
3.2 Характеристики функциональных измерительных преобразователей
Градуировочная характеристика – (функция преобразования) зависимость между
3.2 Характеристики функциональных измерительных преобразователей
Градуировочная характеристика – (функция преобразования) зависимость между
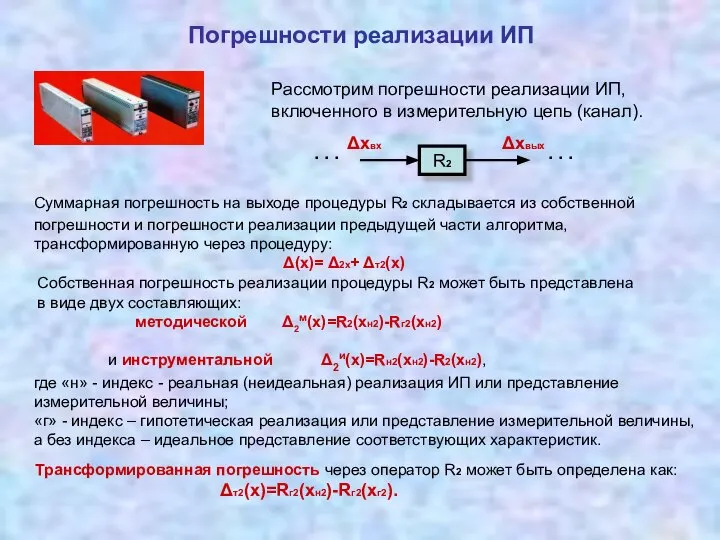
Суммарная погрешность на выходе процедуры R2 складывается из собственной погрешности и
Суммарная погрешность на выходе процедуры R2 складывается из собственной погрешности и
3.3 Функциональные измерительные преобразователи с дискретно управляемыми параметрами
Любой ИП имеет заданную
3.3 Функциональные измерительные преобразователи с дискретно управляемыми параметрами
Любой ИП имеет заданную
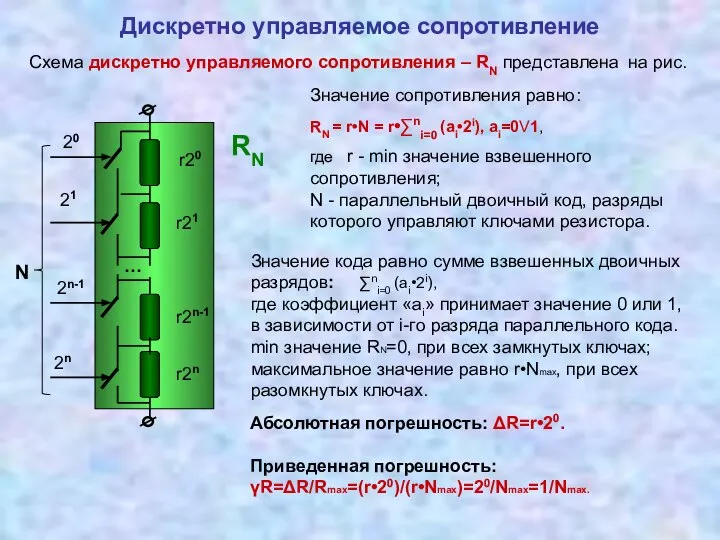
Схема дискретно управляемого сопротивления – RN представлена на рис.
Значение сопротивления
Схема дискретно управляемого сопротивления – RN представлена на рис.
Значение сопротивления

Схема дискретно управляемого конденсатора – СN представлена на рис.
Значение емкости
Схема дискретно управляемого конденсатора – СN представлена на рис.
Значение емкости
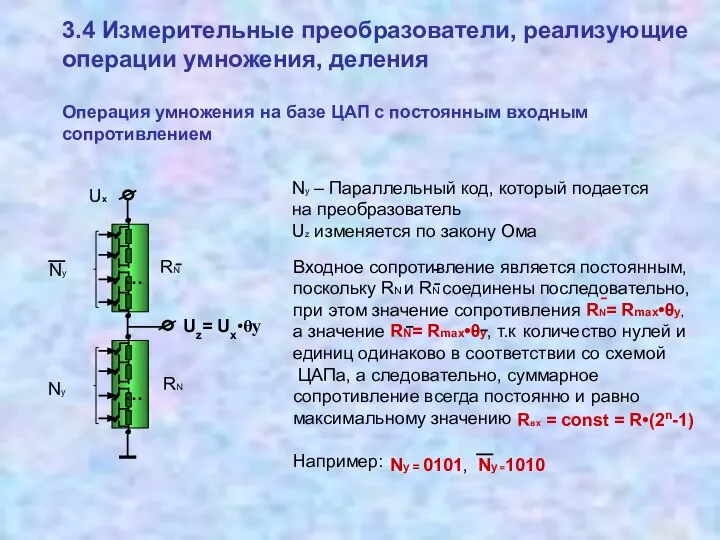
3.4 Измерительные преобразователи, реализующие операции умножения, деления
Операция умножения на базе ЦАП
3.4 Измерительные преобразователи, реализующие операции умножения, деления Операция умножения на базе ЦАП

RN = r•Ny; = r•Ny,
RN
Операция умножения на базе ЦАП с
RN = r•Ny; = r•Ny,
RN
Операция умножения на базе ЦАП с

Операция умножения на базе ЦАП с постоянным выходным сопротивлением
Схема организована так,
Операция умножения на базе ЦАП с постоянным выходным сопротивлением
Схема организована так,

Операция умножения на базе ЦАП с постоянным выходным сопротивлением
Если значение разряда
Операция умножения на базе ЦАП с постоянным выходным сопротивлением
Если значение разряда
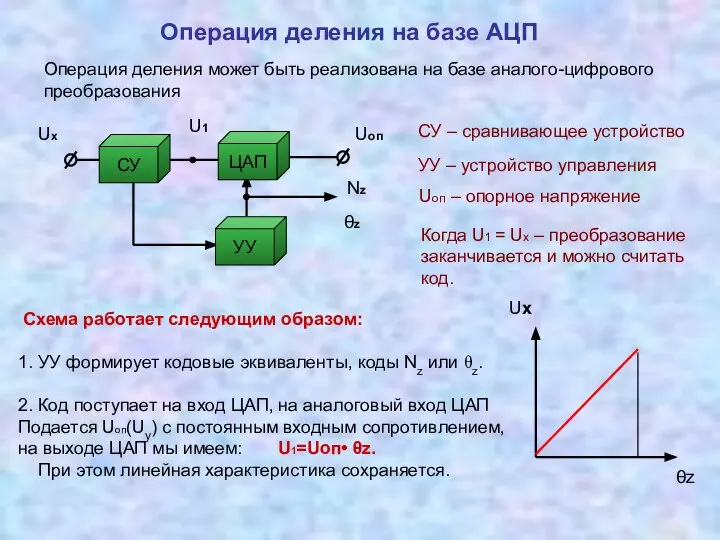
Операция деления на базе АЦП
СУ – сравнивающее устройство
УУ – устройство
Операция деления на базе АЦП
СУ – сравнивающее устройство
УУ – устройство
Операция деления на базе АЦП
4. В момент равенства напряжений СУ вырабатывает
Операция деления на базе АЦП
4. В момент равенства напряжений СУ вырабатывает
Операция деления на базе АЦП
В этом случае погрешности реализации операции деления
Операция деления на базе АЦП
В этом случае погрешности реализации операции деления

При этом поддерживается равенство токов:
I = I0c
или Ux/R = - Uz/Rоc,
При этом поддерживается равенство токов:
I = I0c
или Ux/R = - Uz/Rоc,
Выходное напряжение ОУ будет равно:
Uz = - (Ux/R)•(RосNmax•θy)
или
Uz = - (Ux)•(RосNmax•θy)
Выходное напряжение ОУ будет равно:
Uz = - (Ux/R)•(RосNmax•θy)
или
Uz = - (Ux)•(RосNmax•θy)

Выходное напряжение ОУ будет равно:
Uz = (Ux/RNmax •θy)•(Rос)
или
Uz = (Ux)•(Rос) /R
Выходное напряжение ОУ будет равно:
Uz = (Ux/RNmax •θy)•(Rос)
или
Uz = (Ux)•(Rос) /R
Ux1
Uz
θy1
I1
R1N
θy2
Rоc
= R2N
Iоc
e
K
R3N
I3
Ux2
θy3
θ = N/Nmax
Операции масштабирования на базе ОУ
следует, что схемная реализация
Ux1
Uz
θy1
I1
R1N
θy2
Rоc
= R2N
Iоc
e
K
R3N
I3
Ux2
θy3
θ = N/Nmax
Операции масштабирования на базе ОУ
следует, что схемная реализация
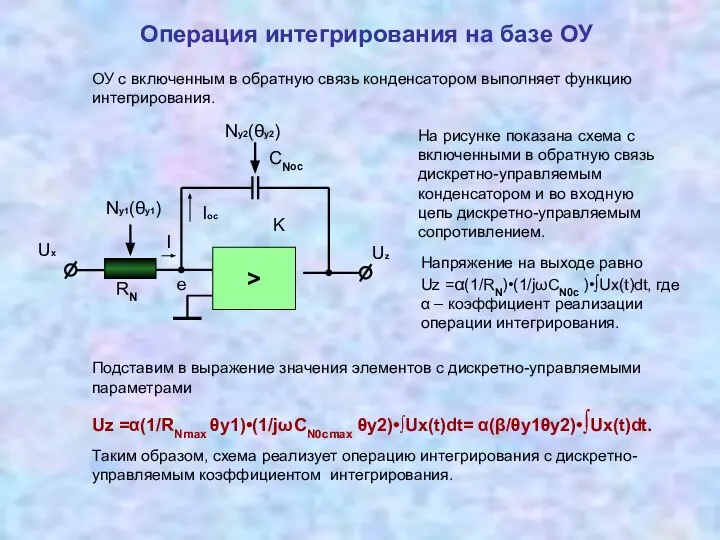
Операция интегрирования на базе ОУ
Напряжение на выходе равно
Uz =α(1/RN)•(1/jωCN0c )•∫Ux(t)dt,
Операция интегрирования на базе ОУ
Напряжение на выходе равно
Uz =α(1/RN)•(1/jωCN0c )•∫Ux(t)dt,

3.5 Соотношение между уравнением измерений и физической реализацией измерительных преобразований
Измерительный канал
3.5 Соотношение между уравнением измерений и физической реализацией измерительных преобразований
Измерительный канал
Операция масштабирования
Операция масштабирования предназначена для установления соответствия между математической зависимостью и
Операция масштабирования
Операция масштабирования предназначена для установления соответствия между математической зависимостью и

Коэффициент масштабирования.
Масштабное уравнение.
zU=mz•Uz; Uz=zU/mz;
xU=mx•Ux; или Ux=xU/mx;
yθ=my•θy; Uy= yθ/my;
Тогда подставим значения физических
Коэффициент масштабирования.
Масштабное уравнение.
zU=mz•Uz; Uz=zU/mz;
xU=mx•Ux; или Ux=xU/mx;
yθ=my•θy; Uy= yθ/my;
Тогда подставим значения физических
3.6 Анализ погрешностей при реализации измерительного канала
Составляющие погрешности результата измерений при
3.6 Анализ погрешностей при реализации измерительного канала
Составляющие погрешности результата измерений при
Выбор разрядности АЦП
Примем для оценки разрешающей способности АЦП соотношение:
m=S/ΔS =
Выбор разрядности АЦП
Примем для оценки разрешающей способности АЦП соотношение:
m=S/ΔS =
 Аэропорты
Аэропорты Алгоритмизация и программирование
Алгоритмизация и программирование Устранение несоответствия по перетиранию шланга радиатора охлаждения о жгут проводов двигателя а/м LADA XRAY
Устранение несоответствия по перетиранию шланга радиатора охлаждения о жгут проводов двигателя а/м LADA XRAY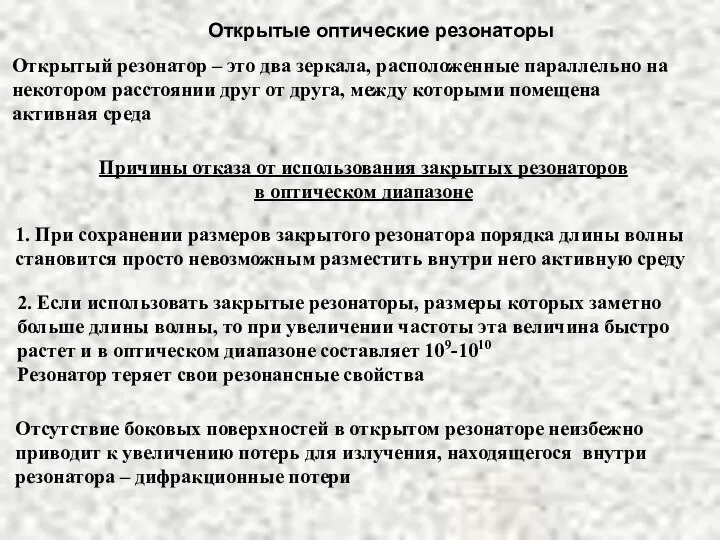 Открытые оптические резонаторы
Открытые оптические резонаторы Языки программирования
Языки программирования Тема урока: «Современное повседневное декоративное искусство. Что такое дизайн». 5 класс
Тема урока: «Современное повседневное декоративное искусство. Что такое дизайн». 5 класс  ХУДОЖЕСТВЕННОЕ РЕМЕСЛО
ХУДОЖЕСТВЕННОЕ РЕМЕСЛО  Под звон коклюшек… История мценского кружева
Под звон коклюшек… История мценского кружева Развитие парковых территорий средствами социально-культурной деятельности
Развитие парковых территорий средствами социально-культурной деятельности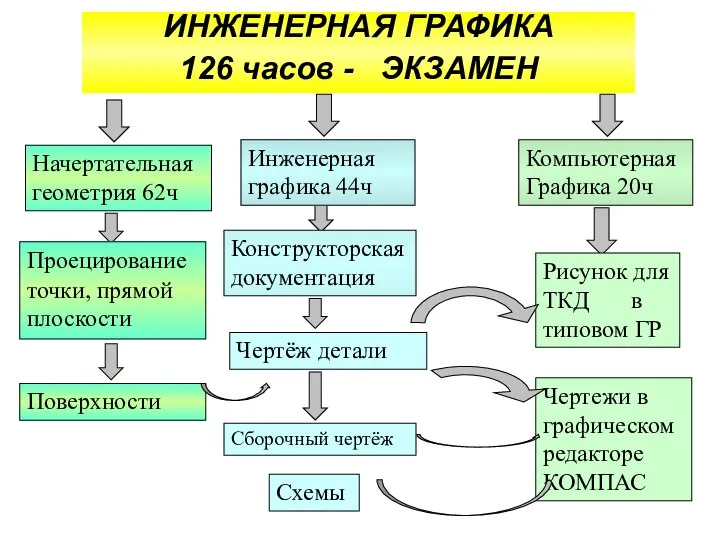 Проекционное черчение
Проекционное черчение Нормы ГТО для всех
Нормы ГТО для всех КВАНТОВАЯ ПРИРОДА ИЗЛУЧЕНИЯ
КВАНТОВАЯ ПРИРОДА ИЗЛУЧЕНИЯ Презентация "Десятинная церковь" - скачать презентации по МХК
Презентация "Десятинная церковь" - скачать презентации по МХК C# делегаты
C# делегаты Тимофеев-Ресовский Николай Владимирович – выдающийся русский генетик. 1900 -1981
Тимофеев-Ресовский Николай Владимирович – выдающийся русский генетик. 1900 -1981 Гісторыя Беларусі як вучэбная дысцыпліна
Гісторыя Беларусі як вучэбная дысцыпліна Бюджетная система РФ Изменения в законодательстве
Бюджетная система РФ Изменения в законодательстве Могут ли сани ходить в лес сами
Могут ли сани ходить в лес сами Организация туристского похода в профессиональной образовательной организации как средство достижения ВФСК ГТО
Организация туристского похода в профессиональной образовательной организации как средство достижения ВФСК ГТО Ўзбекистон таълим, фан ва маданият. Ходимлари касаба уюшмаси учтепа туман кенгашига. Хуш келибсиз
Ўзбекистон таълим, фан ва маданият. Ходимлари касаба уюшмаси учтепа туман кенгашига. Хуш келибсиз Аттестационная работа. Художественно-эстетическое развитие детей на примере татарского фольклора
Аттестационная работа. Художественно-эстетическое развитие детей на примере татарского фольклора ОСУЩЕСТВЛЕНИЕ ФУНДАМЕНТАЛЬНЫХ ИЛИ ПРИКЛАДНЫХ НАУЧНЫХ ИССЛЕДОВАНИЙ ПО 1 ИЛИ БОЛЕЕ ОТРАСЛЯМ НАУК
ОСУЩЕСТВЛЕНИЕ ФУНДАМЕНТАЛЬНЫХ ИЛИ ПРИКЛАДНЫХ НАУЧНЫХ ИССЛЕДОВАНИЙ ПО 1 ИЛИ БОЛЕЕ ОТРАСЛЯМ НАУК Разработка мероприятий, повышающих энерго-эффективность насосной станций ГКП «Астана Су Арнасы»
Разработка мероприятий, повышающих энерго-эффективность насосной станций ГКП «Астана Су Арнасы» Презентация "Изменение образа лошади в изобразительном искусстве" - скачать презентации по МХК
Презентация "Изменение образа лошади в изобразительном искусстве" - скачать презентации по МХК Клод Моне
Клод Моне Политические партии и движения
Политические партии и движения Объектно-ориентированное программирование БД
Объектно-ориентированное программирование БД Аналіз поведінки споживача
Аналіз поведінки споживача