- Интеллектуальные системы. Компьютерное зрение

Содержание
- 2. Основные понятия Компьютерное зрение — теория и технология создания машин, которые могут видеть. Как научная дисциплина,
- 3. Примеры применения систем компьютерного зрения Системы управления процессами (промышленные роботы, автономные транспортные средства) Системы видеонаблюдения Системы
- 4. Задача компьютерного зрения Понять, что запечатлено на изображении Компьютер видит Мы видим
- 5. История: первая презентация Самая первая фотография 1825 год Требовала 8 часов проявки
- 6. Whirlwind, MIT, 1951 Первый компьютер, отображающий текст и графику в реальном времени на мониторе Точками карту,
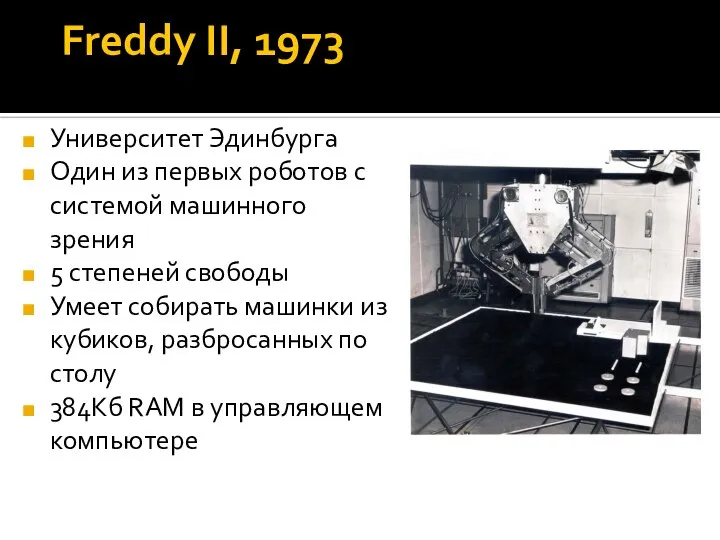
- 7. Freddy II, 1973 Университет Эдинбурга Один из первых роботов с системой машинного зрения 5 степеней свободы
- 8. Решаемые задачи Изображения и видео повсюду Бурно растущая область Обработка – улучшение качества, ретушь, изменение размера
- 9. Типичные функции систем компьютерного зрения Получение изображения Предварительная обработка Выделение деталей Детектирование/Сегментация Высокоуровневая обработка
- 10. Сглаживание изображений Всем устройствам получения изображений присуще наличие шумов в получаемых изображениях. Шумы могут порождаться как
- 11. Сглаживание изображений Один из способов сглаживания изображения состоит в том, чтобы каждому пикселу присваивалось среднее значение
- 12. Фильтр с гауссовой характеристикой Под применением фильтра с гауссовой характеристикой подразумевается замена значения интенсивности I(х0/у0) суммой
- 13. Применение сглаживания для обнаружения роботом объектов сцены Обнаружение регионов на изображении без и с использованием фильтра
- 14. Обнаружение краев Края(границы) — это такие кривые на изображении, вдоль которых происходит резкое изменение яркости или
- 15. Обнаружение краев Целью обнаружения краев является повышение уровня абстракции и переход от перегруженного подробностями мультимегабайтового изображения
- 16. Детектор границ Кенни Хотя работа Кенни была проведена на заре компьютерного зрения (1986), детектор границ Кенни
- 17. Применение метода детектора границ Кенни реализация отслеживания разделительных полос на основе библиотеки OpenCV и использование детектора
- 18. Вычисление градиента. Оператор Собеля. Производная (функции в точке) — это скорость изменения функции (в данной точке).
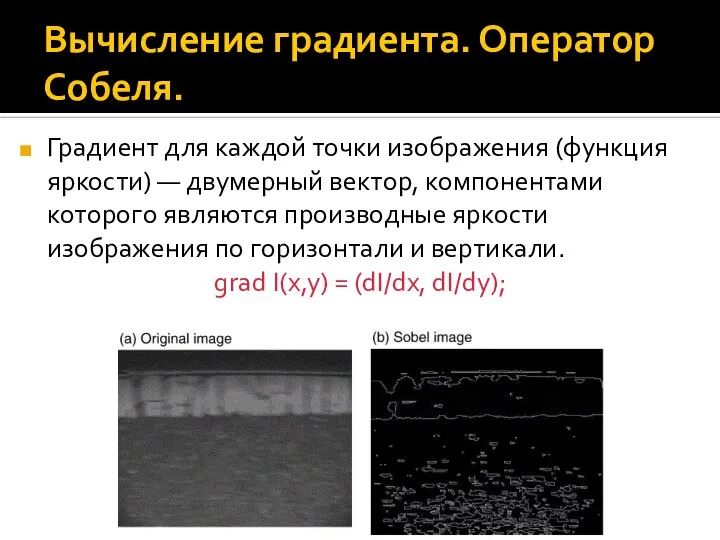
- 19. Вычисление градиента. Оператор Собеля. Градиент для каждой точки изображения (функция яркости) — двумерный вектор, компонентами которого
- 20. Вычисление градиента. Оператор Собеля. Оператор Собеля — это дискретный дифференциальный оператор, вычисляющий приближение градиента яркости изображения.
- 21. Детектор границ Кенни Границы на изображении могут находиться в различных направлениях, поэтому алгоритм Кенни использует четыре
- 22. Детектор границ Кенни Угол направления границы округляется до одной из четырех углов, представляющих вертикаль, горизонталь и
- 23. Детектор границ Кенни Например, для сетки 3x3: если угол направления градиента равен нулю, точка будет считаться
- 24. Сегментация изображения Мозг человека не использует полученные им результаты восприятия в непосредственном виде, а организует эти
- 25. Сегментация изображения Основная идея сегментаци состоит в следующем: каждый пиксел изображения может быть связан с некоторыми
- 26. Сегментация изображения Процесс сегментации, основанный исключительно на использовании низкоуровневых локальных атрибутов, таких как яркость и цвет,
- 27. Сегментация изображения Методы сегментации можно разделить на два класса: автоматические – не требующие взаимодействия с пользователем
- 28. Пример сегментации
- 29. Оценка качества работы методов сегментации однородность регионов (однородность цвета или текстуры) непохожесть соседних регионов гладкость границы
- 30. Кластеризация цветового пространства В постановке задачи сегментации прослеживается аналогия с задачей кластеризации. Для того чтобы свести
- 31. Кластеризация цветового пространства В качестве признаков точки изображения можно использовать представление ее цвета в некотором цветовом
- 32. Кластеризация цветового пространства Основная проблема методов кластеризации, состоит в том, что пространственное расположение точек либо не
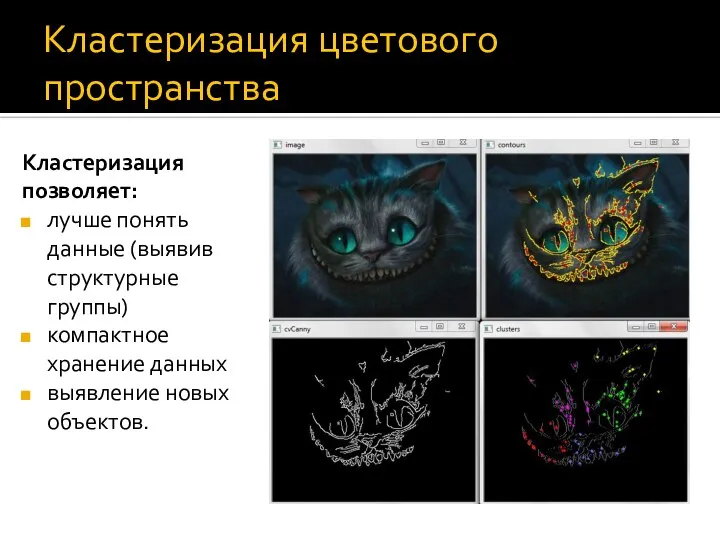
- 33. Кластеризация цветового пространства Кластеризация позволяет: лучше понять данные (выявив структурные группы) компактное хранение данных выявление новых
- 34. Метод выращивание регионов Методы этой группы учитывают пространственное расположение точек напрямую. Методы выращивания регионов основаны на
- 35. Метод дробления-слияния Методы дробления-слияния состоят из двух основных этапов: дробления и слияния. Дробление начинается с некоторого
- 36. Пирамиды изображений Пирамиды изображений - это коллекция изображений, получаемая из исходного изображения путём его последовательного сжимания
- 37. Пирамиды изображений Существует два вида пирамид - пирамиды Гаусса и Лапласа. Пирамиды Гаусса используются для сжимания
- 38. Гауссовская пирамида Для получения слоя (i+1) в Гауссовской пирамиде (обозначим этот слой Gi+1) из слоя Gi
- 39. Пирамида Лапласа Изображение сначала преобразуется в два раза большее в обоих измерениях, с новыми строками заполненными
- 40. Пирамидальная сегментации Операции построения пирамид Гаусса и Лапласа используются для выполнения пирамидальной сегментации. Для этого на
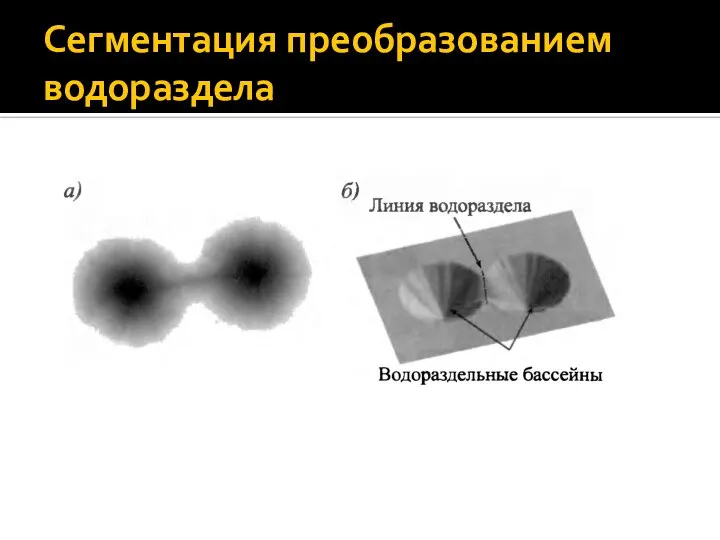
- 41. Сегментация преобразованием водораздела В географии термин водораздел обозначает условную линию, которая разделяет области водосборов разных речных
- 42. Сегментация преобразованием водораздела
- 43. Виды сегментации по водоразделу Сегментация по водоразделам с помощью преобразования расстояния Сегментация по водоразделам с помощью
- 44. Поиск объектов на изображении Детектор Violo-Jones основополагающий метод для поиска объектов на изображении в реальном времени
- 45. Детектор Violo-Jones Основные идеи: Скользящее окно Интегральные изображения для быстрого вычисления признаков Бустинг для выбора признаков
- 46. Признаки Хаара
- 47. Интегральные изображения Значение каждого пикселя (x,y) равно сумме значений всех пикселей левее и выше пикселя (x,y)
- 48. Вычисление интегрального изображения
- 49. Вычисление суммы в прямоугольнике
- 50. Пример интегрального изображения
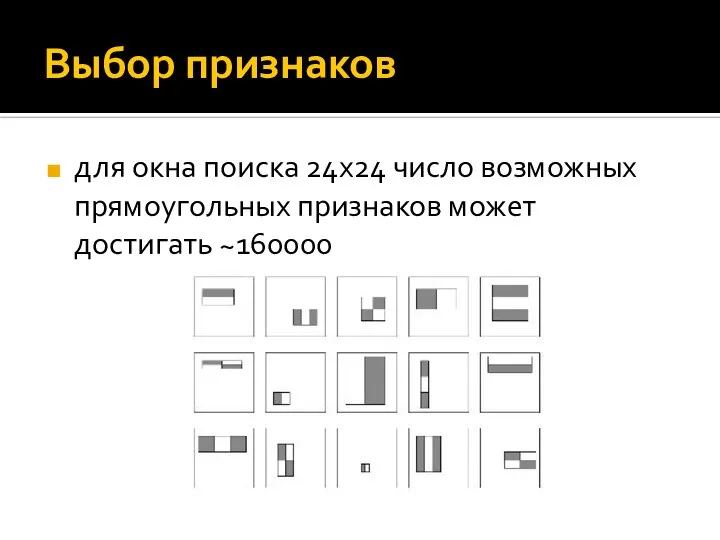
- 51. Выбор признаков для окна поиска 24х24 число возможных прямоугольных признаков может достигать ~160000
- 52. Бустинг Бустинг – схема классификации, основанная на комбинировании слабых классификаторов в более точный Обучение состоит из
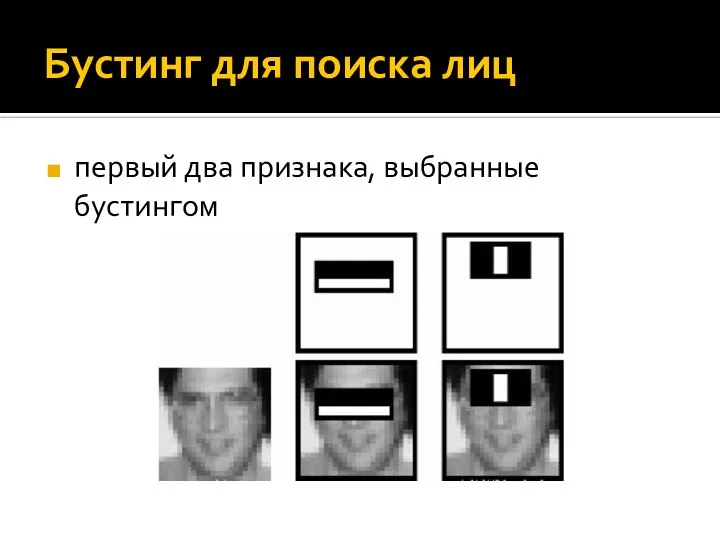
- 53. Бустинг для поиска лиц первый два признака, выбранные бустингом
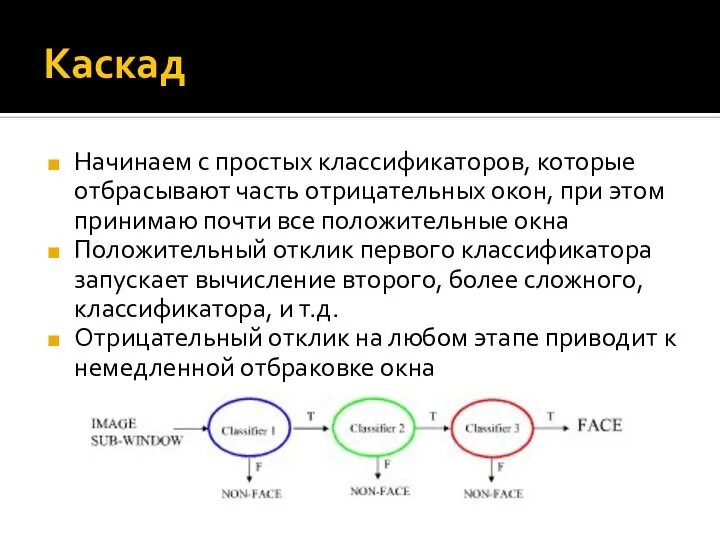
- 54. Каскад Начинаем с простых классификаторов, которые отбрасывают часть отрицательных окон, при этом принимаю почти все положительные
- 55. Параметры каскада detection rate и false positive rate каскада вычисляются как произведение соответствующих ошибок каждого этапа
- 57. Скачать презентацию
Основные понятия
Компьютерное зрение — теория и технология создания машин, которые могут видеть.
Как
Основные понятия
Компьютерное зрение — теория и технология создания машин, которые могут видеть.
Как
Примеры применения систем компьютерного зрения
Системы управления процессами (промышленные роботы, автономные транспортные средства)
Системы
Примеры применения систем компьютерного зрения
Системы управления процессами (промышленные роботы, автономные транспортные средства)
Системы

Задача компьютерного зрения
Понять, что запечатлено на изображении
Компьютер видит
Мы видим
Задача компьютерного зрения
Понять, что запечатлено на изображении
Компьютер видит
Мы видим
История: первая презентация
Самая первая фотография
1825 год
Требовала 8 часов проявки
История: первая презентация
Самая первая фотография
1825 год
Требовала 8 часов проявки
Whirlwind, MIT, 1951
Первый компьютер, отображающий текст и графику в реальном времени
Whirlwind, MIT, 1951
Первый компьютер, отображающий текст и графику в реальном времени
Freddy II, 1973
Университет Эдинбурга
Один из первых роботов с системой машинного зрения
5
Freddy II, 1973
Университет Эдинбурга
Один из первых роботов с системой машинного зрения
5
Решаемые задачи
Изображения и видео повсюду
Бурно растущая область
Обработка – улучшение качества, ретушь,
Решаемые задачи
Изображения и видео повсюду
Бурно растущая область
Обработка – улучшение качества, ретушь,
Типичные функции систем компьютерного зрения
Получение изображения
Предварительная обработка
Выделение деталей
Детектирование/Сегментация
Высокоуровневая обработка
Типичные функции систем компьютерного зрения
Получение изображения
Предварительная обработка
Выделение деталей
Детектирование/Сегментация
Высокоуровневая обработка
Сглаживание изображений
Всем устройствам получения изображений присуще наличие шумов в получаемых изображениях.
Сглаживание изображений
Всем устройствам получения изображений присуще наличие шумов в получаемых изображениях.
Сглаживание изображений
Один из способов сглаживания изображения состоит в том, чтобы каждому
Сглаживание изображений
Один из способов сглаживания изображения состоит в том, чтобы каждому
Фильтр с гауссовой характеристикой
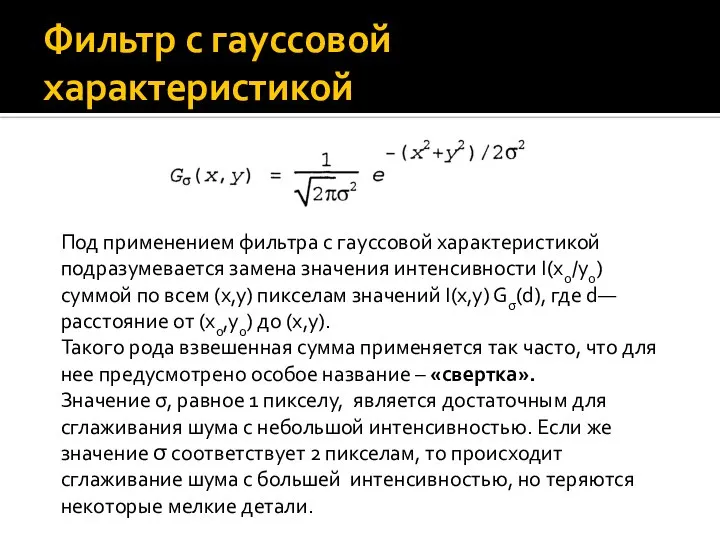
Под применением фильтра с гауссовой характеристикой подразумевается замена
Фильтр с гауссовой характеристикой
Под применением фильтра с гауссовой характеристикой подразумевается замена
Применение сглаживания для обнаружения роботом объектов сцены
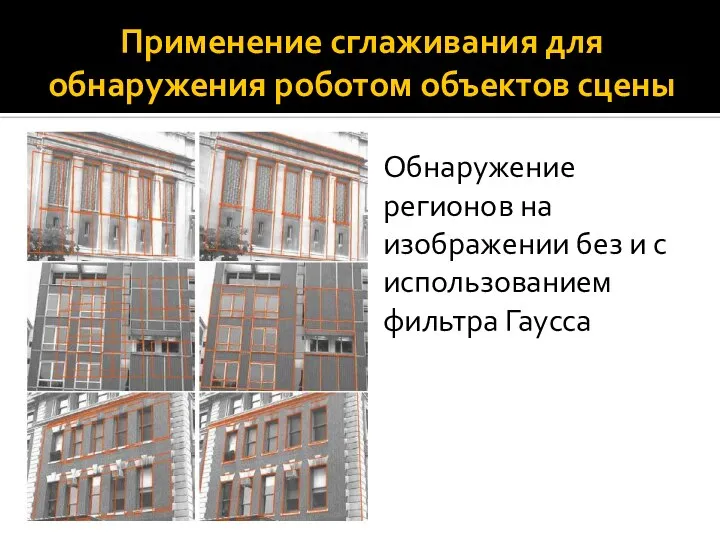
Обнаружение регионов на изображении без
Применение сглаживания для обнаружения роботом объектов сцены
Обнаружение регионов на изображении без
Обнаружение краев
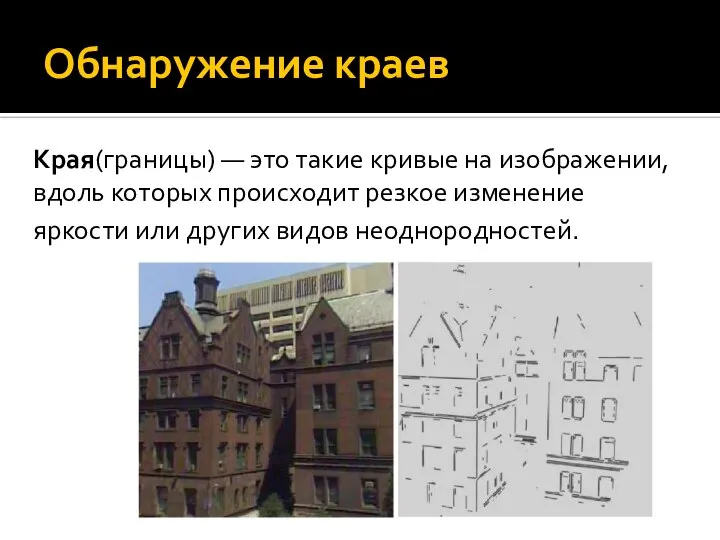
Края(границы) — это такие кривые на изображении, вдоль которых происходит
Обнаружение краев
Края(границы) — это такие кривые на изображении, вдоль которых происходит
Обнаружение краев
Целью обнаружения краев является повышение уровня абстракции и переход от
Обнаружение краев
Целью обнаружения краев является повышение уровня абстракции и переход от
Детектор границ Кенни
Хотя работа Кенни была проведена на заре компьютерного зрения
Детектор границ Кенни
Хотя работа Кенни была проведена на заре компьютерного зрения

Применение метода детектора границ Кенни
реализация отслеживания разделительных полос на основе библиотеки
Применение метода детектора границ Кенни
реализация отслеживания разделительных полос на основе библиотеки
Вычисление градиента. Оператор Собеля.
Производная (функции в точке) — это скорость изменения функции
Вычисление градиента. Оператор Собеля.
Производная (функции в точке) — это скорость изменения функции
Вычисление градиента. Оператор Собеля.
Градиент для каждой точки изображения (функция яркости) —
Вычисление градиента. Оператор Собеля.
Градиент для каждой точки изображения (функция яркости) —
Вычисление градиента. Оператор Собеля.
Оператор Собеля — это дискретный дифференциальный оператор, вычисляющий приближение
Вычисление градиента. Оператор Собеля.
Оператор Собеля — это дискретный дифференциальный оператор, вычисляющий приближение
Детектор границ Кенни
Границы на изображении могут находиться в различных направлениях, поэтому
Детектор границ Кенни
Границы на изображении могут находиться в различных направлениях, поэтому
Детектор границ Кенни
Угол направления границы округляется до одной из четырех углов,
Детектор границ Кенни
Угол направления границы округляется до одной из четырех углов,
Детектор границ Кенни
Например, для сетки 3x3:
если угол направления градиента равен нулю,
Детектор границ Кенни
Например, для сетки 3x3:
если угол направления градиента равен нулю,
Сегментация изображения
Мозг человека не использует полученные им результаты восприятия в непосредственном
Сегментация изображения
Мозг человека не использует полученные им результаты восприятия в непосредственном
Сегментация изображения
Основная идея сегментаци состоит в следующем: каждый пиксел изображения может
Сегментация изображения
Основная идея сегментаци состоит в следующем: каждый пиксел изображения может
Сегментация изображения
Процесс сегментации, основанный исключительно на использовании низкоуровневых локальных атрибутов, таких
Сегментация изображения
Процесс сегментации, основанный исключительно на использовании низкоуровневых локальных атрибутов, таких
Сегментация изображения
Методы сегментации можно разделить на два класса:
автоматические – не
Сегментация изображения
Методы сегментации можно разделить на два класса:
автоматические – не
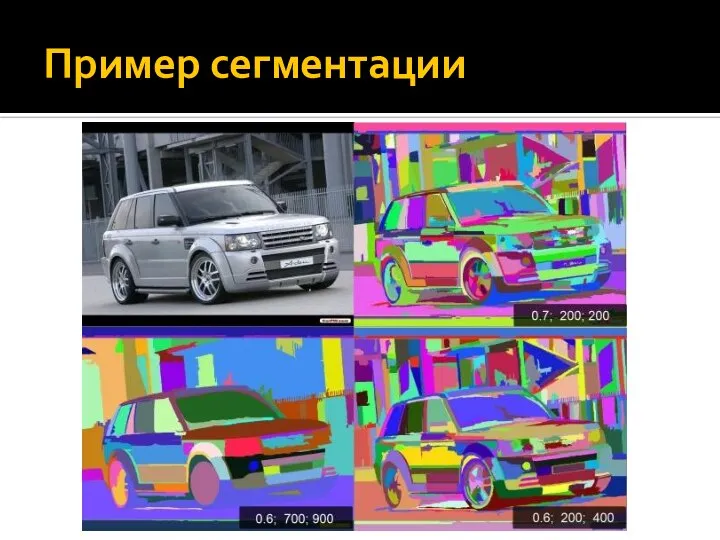
Пример сегментации
Пример сегментации
Оценка качества работы методов сегментации
однородность регионов (однородность цвета или текстуры)
непохожесть соседних
Оценка качества работы методов сегментации
однородность регионов (однородность цвета или текстуры)
непохожесть соседних
Кластеризация цветового пространства
В постановке задачи сегментации прослеживается аналогия с задачей кластеризации.
Кластеризация цветового пространства
В постановке задачи сегментации прослеживается аналогия с задачей кластеризации.
Кластеризация цветового пространства
В качестве признаков точки изображения можно использовать представление ее
Кластеризация цветового пространства
В качестве признаков точки изображения можно использовать представление ее
Кластеризация цветового пространства
Основная проблема методов кластеризации, состоит в том, что пространственное
Кластеризация цветового пространства
Основная проблема методов кластеризации, состоит в том, что пространственное
Кластеризация цветового пространства
Кластеризация позволяет:
лучше понять данные (выявив структурные группы)
компактное хранение данных
выявление
Кластеризация цветового пространства
Кластеризация позволяет:
лучше понять данные (выявив структурные группы)
компактное хранение данных
выявление
Метод выращивание регионов
Методы этой группы учитывают пространственное расположение точек напрямую.
Методы выращивания
Метод выращивание регионов
Методы этой группы учитывают пространственное расположение точек напрямую.
Методы выращивания
Метод дробления-слияния
Методы дробления-слияния состоят из двух основных этапов: дробления и слияния.
Метод дробления-слияния
Методы дробления-слияния состоят из двух основных этапов: дробления и слияния.
Пирамиды изображений
Пирамиды изображений - это коллекция изображений, получаемая из исходного изображения
Пирамиды изображений
Пирамиды изображений - это коллекция изображений, получаемая из исходного изображения
Пирамиды изображений
Существует два вида пирамид - пирамиды Гаусса и Лапласа. Пирамиды
Пирамиды изображений
Существует два вида пирамид - пирамиды Гаусса и Лапласа. Пирамиды
Гауссовская пирамида
Для получения слоя (i+1) в Гауссовской пирамиде (обозначим этот слой
Гауссовская пирамида
Для получения слоя (i+1) в Гауссовской пирамиде (обозначим этот слой
Пирамида Лапласа
Изображение сначала преобразуется в два раза большее в обоих измерениях,
Пирамида Лапласа
Изображение сначала преобразуется в два раза большее в обоих измерениях,
Пирамидальная сегментации
Операции построения пирамид Гаусса и Лапласа используются для выполнения пирамидальной
Пирамидальная сегментации
Операции построения пирамид Гаусса и Лапласа используются для выполнения пирамидальной
Сегментация преобразованием водораздела
В географии термин водораздел обозначает условную линию, которая разделяет
Сегментация преобразованием водораздела
В географии термин водораздел обозначает условную линию, которая разделяет
Сегментация преобразованием водораздела
Сегментация преобразованием водораздела

Виды сегментации по водоразделу
Сегментация по водоразделам с помощью преобразования расстояния
Сегментация
Виды сегментации по водоразделу
Сегментация по водоразделам с помощью преобразования расстояния
Сегментация
Поиск объектов на изображении
Детектор Violo-Jones
основополагающий метод для поиска объектов на изображении
Поиск объектов на изображении
Детектор Violo-Jones
основополагающий метод для поиска объектов на изображении
Детектор Violo-Jones
Основные идеи:
Скользящее окно
Интегральные изображения для быстрого вычисления признаков
Бустинг для выбора
Детектор Violo-Jones
Основные идеи:
Скользящее окно
Интегральные изображения для быстрого вычисления признаков
Бустинг для выбора
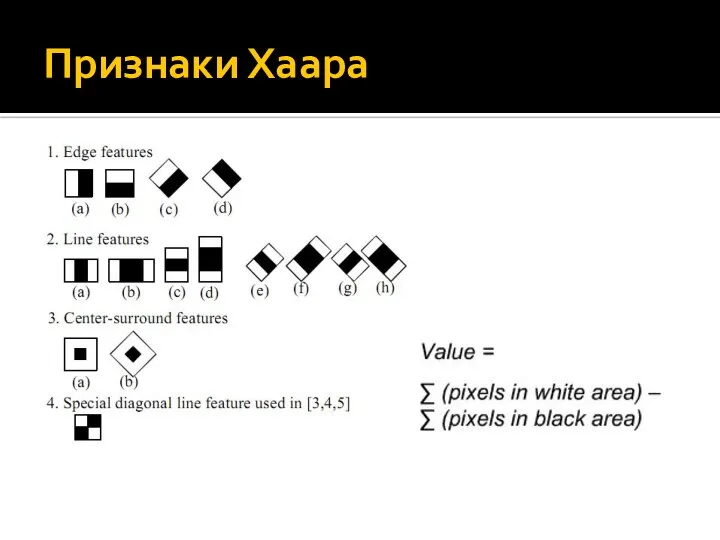
Признаки Хаара
Признаки Хаара
Интегральные изображения
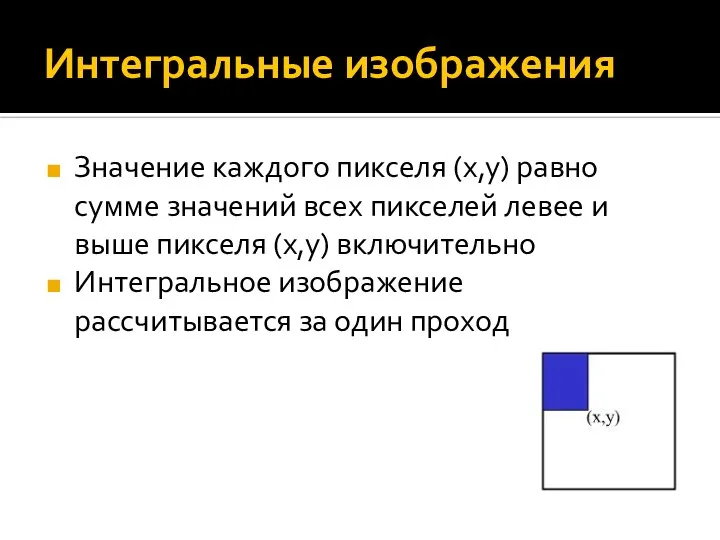
Значение каждого пикселя (x,y) равно сумме значений всех пикселей левее
Интегральные изображения
Значение каждого пикселя (x,y) равно сумме значений всех пикселей левее
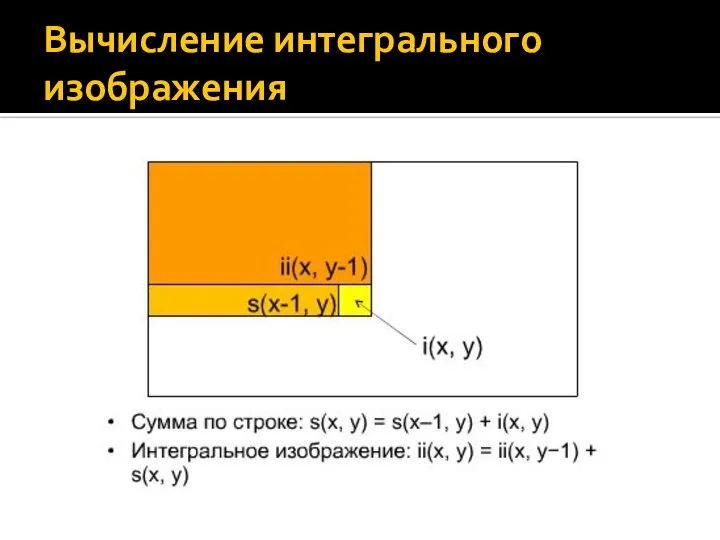
Вычисление интегрального изображения
Вычисление интегрального изображения
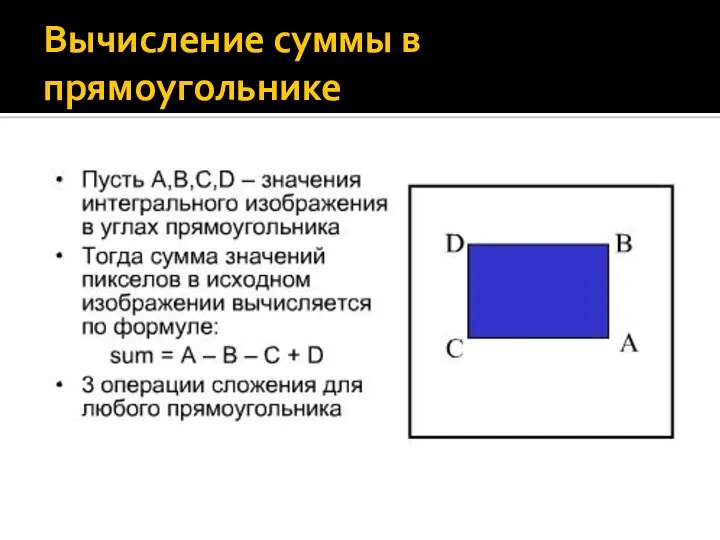
Вычисление суммы в прямоугольнике
Вычисление суммы в прямоугольнике
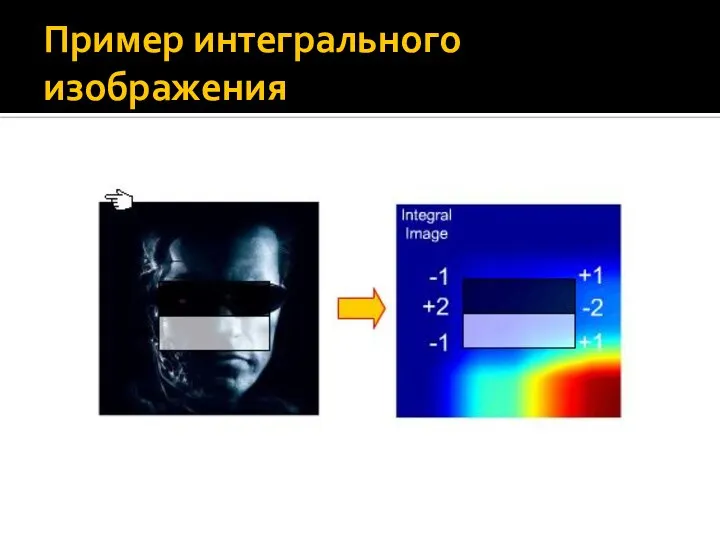
Пример интегрального изображения
Пример интегрального изображения
Выбор признаков
для окна поиска 24х24 число возможных прямоугольных признаков может достигать
Выбор признаков
для окна поиска 24х24 число возможных прямоугольных признаков может достигать
Бустинг
Бустинг – схема классификации, основанная на комбинировании слабых классификаторов в более
Бустинг
Бустинг – схема классификации, основанная на комбинировании слабых классификаторов в более
Бустинг для поиска лиц
первый два признака, выбранные бустингом
Бустинг для поиска лиц
первый два признака, выбранные бустингом
Каскад
Начинаем с простых классификаторов, которые отбрасывают часть отрицательных окон, при этом
Каскад
Начинаем с простых классификаторов, которые отбрасывают часть отрицательных окон, при этом
Параметры каскада
detection rate и false positive rate каскада вычисляются как произведение
Параметры каскада
detection rate и false positive rate каскада вычисляются как произведение
 Презентация Рынок мяса в России
Презентация Рынок мяса в России  Презентация "jd" - скачать презентации по МХК
Презентация "jd" - скачать презентации по МХК БУ с нуля
БУ с нуля Презентация Примирительная теория права
Презентация Примирительная теория права  Параметрические методы ценообразования
Параметрические методы ценообразования Математика 4класс Молчановский район МОУ Тунгусовская СОШ Учитель начальных классов Попова Светлана Николаевна
Математика 4класс Молчановский район МОУ Тунгусовская СОШ Учитель начальных классов Попова Светлана Николаевна Технология монтажа трубопровода из полипропилена и МПТ (металло-полимерной трубы) с установкой водоразборной арматуры
Технология монтажа трубопровода из полипропилена и МПТ (металло-полимерной трубы) с установкой водоразборной арматуры Фундаменты под оборудование
Фундаменты под оборудование Евфросиния Полоцкая и Кирилл Туровский
Евфросиния Полоцкая и Кирилл Туровский Презентация на тему "ПРОТИВОПРОТОЗОЙНЫЕ, ПРОТИВОГЛИСТНЫЕ СРЕДСТВА" - скачать презентации по Медицине
Презентация на тему "ПРОТИВОПРОТОЗОЙНЫЕ, ПРОТИВОГЛИСТНЫЕ СРЕДСТВА" - скачать презентации по Медицине Адресная арифметика. «Структурные» типы данных
Адресная арифметика. «Структурные» типы данных Привлечение пользователей на мероприятие "Ночь студенческого искусства"
Привлечение пользователей на мероприятие "Ночь студенческого искусства" Особенности профессиональной деятельности учителя начальной школы
Особенности профессиональной деятельности учителя начальной школы Курсы по продвижению сайтов
Курсы по продвижению сайтов Комплексные чертежи линий
Комплексные чертежи линий Читання складів з вивченими буквами - презентация для начальной школы
Читання складів з вивченими буквами - презентация для начальной школы Презентация на тему "Педагогические взгляды Л.Н.Толстого" - скачать презентации по Педагогике
Презентация на тему "Педагогические взгляды Л.Н.Толстого" - скачать презентации по Педагогике Rewriting Term Systems
Rewriting Term Systems Легитимность власти. Типы легитимности. Типы легитимности по М. Веберу
Легитимность власти. Типы легитимности. Типы легитимности по М. Веберу «Осеннее лукошко» Конкурс поделок из природного материала.
«Осеннее лукошко» Конкурс поделок из природного материала. Виды административных наказаний, их общая характеристика Выполнила: студентка 2 курса ЭФ, группы Э091 Т.В.Дивейкус
Виды административных наказаний, их общая характеристика Выполнила: студентка 2 курса ЭФ, группы Э091 Т.В.Дивейкус Операторы цикла
Операторы цикла Основы объектно-ориентированного программирования
Основы объектно-ориентированного программирования Аппараты защиты
Аппараты защиты Презентация «В гостях у звука [С]» составлена учителем-логопедом Ермолаевой Натальей Геннадьевной ГБОУ СОШ№236 Г. Санкт- Петербург
Презентация «В гостях у звука [С]» составлена учителем-логопедом Ермолаевой Натальей Геннадьевной ГБОУ СОШ№236 Г. Санкт- Петербург Государственная семейная политика в Японии
Государственная семейная политика в Японии Python Урок 2.1. Строки
Python Урок 2.1. Строки История развития Apple
История развития Apple