- Интерфейсы при потере подвижности (лекция 1)

Содержание
- 2. Неинвазивные интерфейсы, основанные на ЭЭГ В основе устройства BCI должно лежать распознавание паттернов ЭЭГ. Если испытуемый
- 3. Виртуальная клавиатура Одной из систем “мысленного” управления компьютером стал программно-аппаратный комплекс для набора текста, разработанный в
- 4. Управление коляской http://one-fact.ru/1-human-fact/upravlenie-myslyu-ot-kompyutera-do-invalidnoj-kolyaski-i-robotov.html
- 5. Алгоритм управления курсором при помощи ЭЭГ Управление основано на спектральном анализе амплитуды мю-ритма; Алгоритм адаптируется к
- 6. Примеры инвазивных технологий для управления внешними устройствами (протезирование подвижности) Биомеханический протез, управляемый нейрональной активностью мозга обезьяны.
- 7. Пациентка с роботизированной рукой http://science.compulenta.ru/728055/
- 8. Блок микроэлектродов с проводом на кончике указательного пальца Вставить сюда слайд о фирме Киберкинетикс
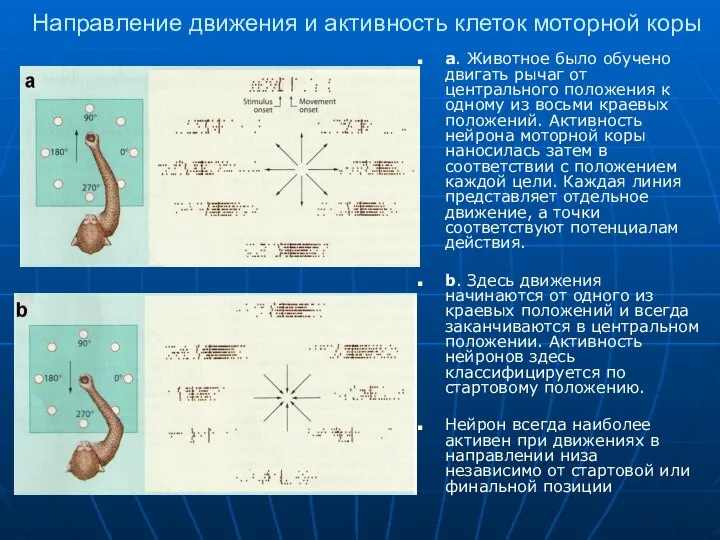
- 9. Направление движения и активность клеток моторной коры a. Животное было обучено двигать рычаг от центрального положения
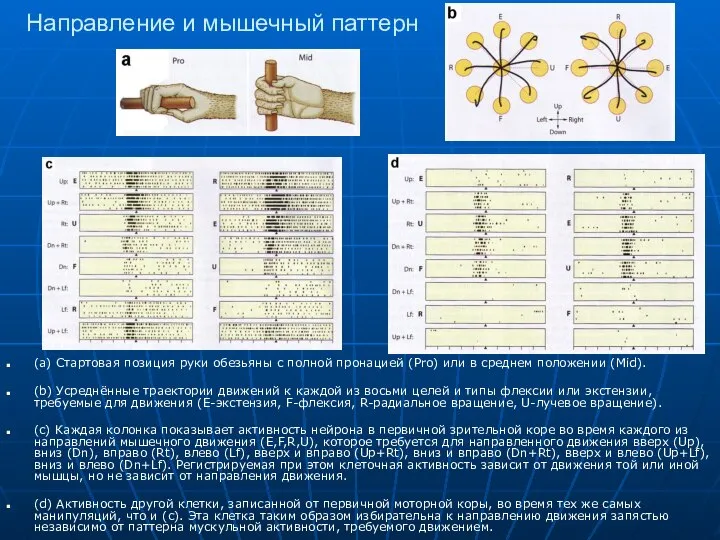
- 10. Направление и мышечный паттерн (a) Стартовая позиция руки обезьяны с полной пронацией (Pro) или в среднем
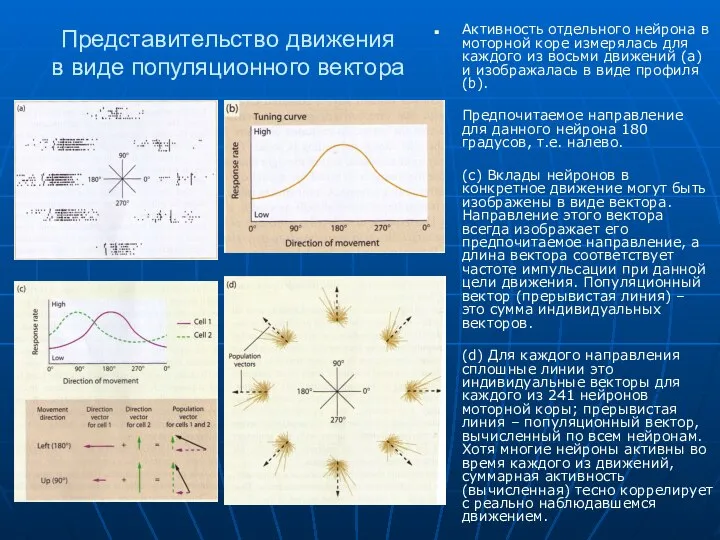
- 11. Представительство движения в виде популяционного вектора Активность отдельного нейрона в моторной коре измерялась для каждого из
- 12. Дирекционный вектор задаёт направление движения
- 13. Нейрон-детектор направления Активность этого нейрона связана с направлением мысленного движения. Частота импульсов растёт при мысленном движении
- 15. Скачать презентацию
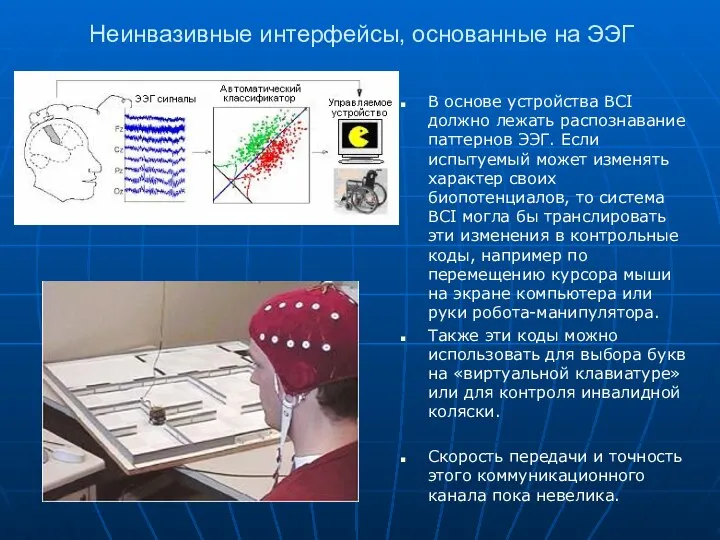
Неинвазивные интерфейсы, основанные на ЭЭГ
В основе устройства BCI должно лежать распознавание
Неинвазивные интерфейсы, основанные на ЭЭГ
В основе устройства BCI должно лежать распознавание
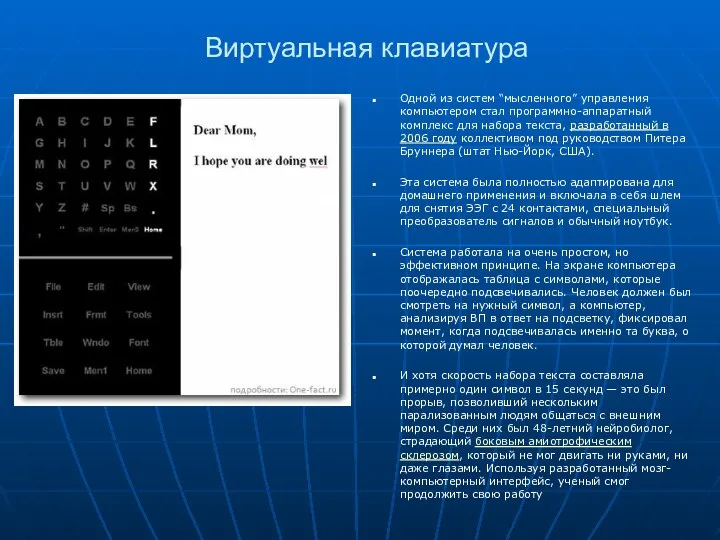
Виртуальная клавиатура
Одной из систем “мысленного” управления компьютером стал программно-аппаратный комплекс для
Виртуальная клавиатура
Одной из систем “мысленного” управления компьютером стал программно-аппаратный комплекс для

Управление коляской
http://one-fact.ru/1-human-fact/upravlenie-myslyu-ot-kompyutera-do-invalidnoj-kolyaski-i-robotov.html
Управление коляской
http://one-fact.ru/1-human-fact/upravlenie-myslyu-ot-kompyutera-do-invalidnoj-kolyaski-i-robotov.html
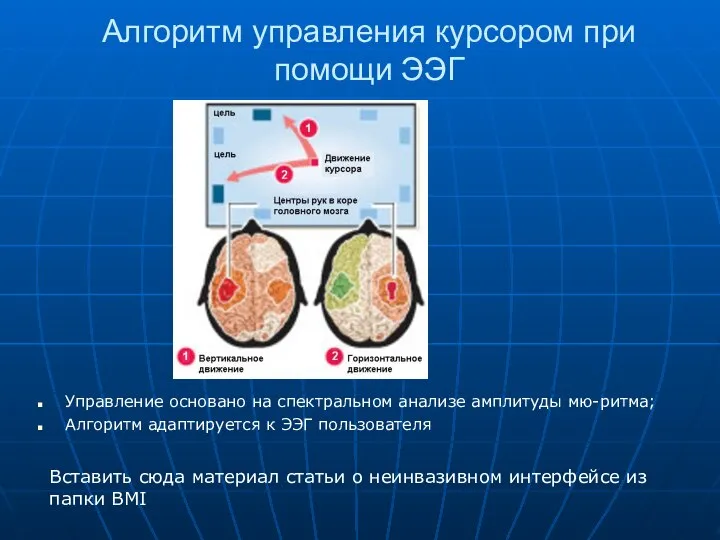
Алгоритм управления курсором при помощи ЭЭГ
Управление основано на спектральном анализе амплитуды
Алгоритм управления курсором при помощи ЭЭГ
Управление основано на спектральном анализе амплитуды
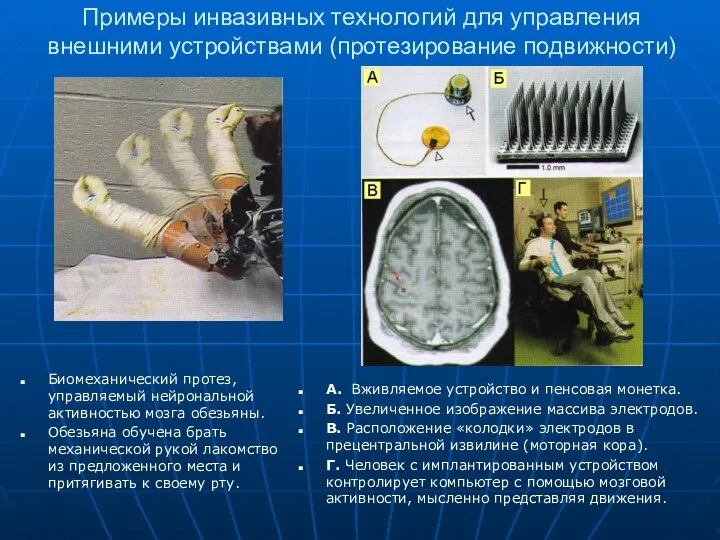
Примеры инвазивных технологий для управления внешними устройствами (протезирование подвижности)
Биомеханический протез, управляемый
Примеры инвазивных технологий для управления внешними устройствами (протезирование подвижности)
Биомеханический протез, управляемый
Пациентка с роботизированной рукой
http://science.compulenta.ru/728055/
Пациентка с роботизированной рукой
http://science.compulenta.ru/728055/

Блок микроэлектродов с проводом на кончике указательного пальца
Вставить сюда слайд о
Блок микроэлектродов с проводом на кончике указательного пальца
Вставить сюда слайд о
Направление движения и активность клеток моторной коры
a. Животное было обучено двигать
Направление движения и активность клеток моторной коры
a. Животное было обучено двигать
Направление и мышечный паттерн
(a) Стартовая позиция руки обезьяны с полной пронацией
Направление и мышечный паттерн
(a) Стартовая позиция руки обезьяны с полной пронацией
Представительство движения
в виде популяционного вектора
Активность отдельного нейрона в моторной коре
Представительство движения
в виде популяционного вектора
Активность отдельного нейрона в моторной коре
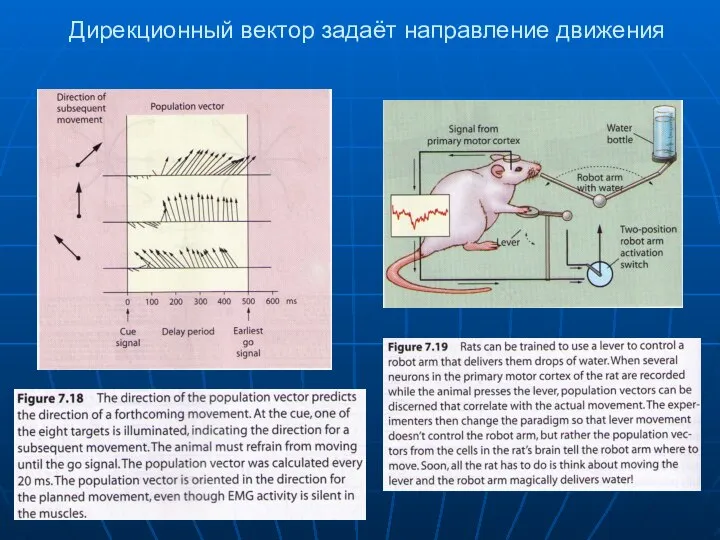
Дирекционный вектор задаёт направление движения
Дирекционный вектор задаёт направление движения
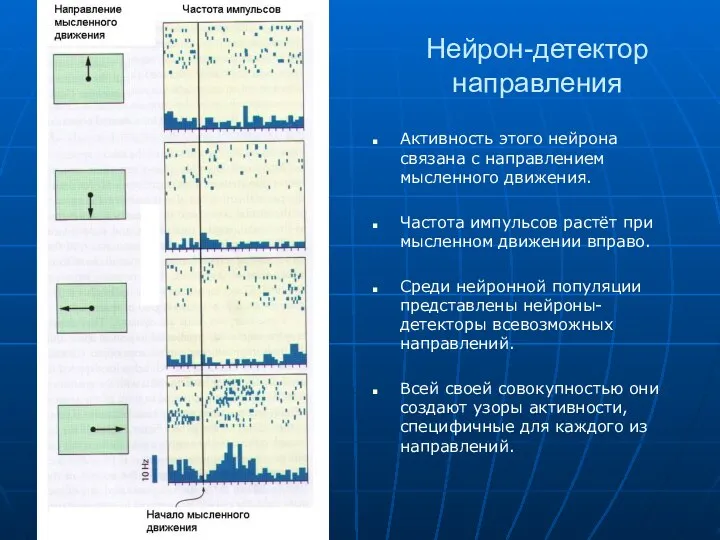
Нейрон-детектор направления
Активность этого нейрона связана с направлением мысленного движения.
Частота импульсов растёт
Нейрон-детектор направления
Активность этого нейрона связана с направлением мысленного движения.
Частота импульсов растёт
 Рабочий чертеж
Рабочий чертеж Метод противодействия несанкционированному доступу к информации, обрабатываемой ЭВМ
Метод противодействия несанкционированному доступу к информации, обрабатываемой ЭВМ Фандрайзинг и мобилизация ресурсов Курс повышения квалификации Москва, 03 – 24 июня 2010
Фандрайзинг и мобилизация ресурсов Курс повышения квалификации Москва, 03 – 24 июня 2010 Провести профориентационную работу среди учащихся
Провести профориентационную работу среди учащихся Администрация Константиновского городского поселения Исполнение бюджета Константиновского городского поселения Константинов
Администрация Константиновского городского поселения Исполнение бюджета Константиновского городского поселения Константинов Порядок надання адміністративних послуг, насамперед базових, і параметри якості послуг
Порядок надання адміністративних послуг, насамперед базових, і параметри якості послуг Расчет аккумулирующей способности последнего участка газопровода
Расчет аккумулирующей способности последнего участка газопровода Цветы - светильники на заказ
Цветы - светильники на заказ Как делать покупки женщинам
Как делать покупки женщинам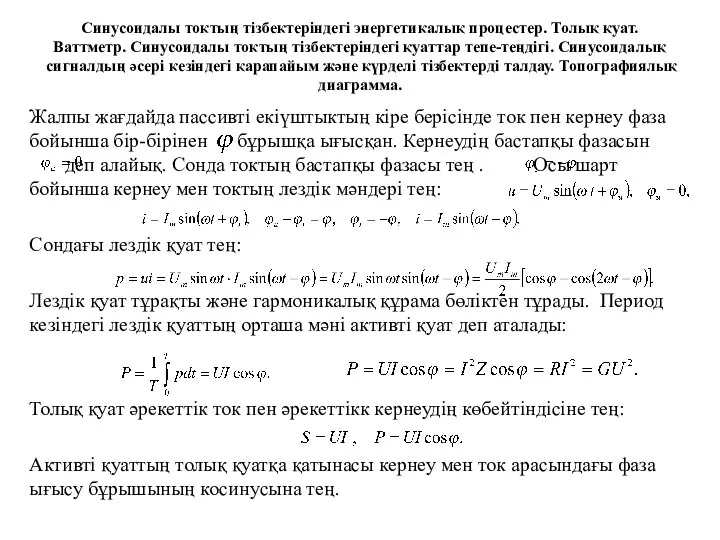 Синусоидалы токтың тізбектеріндегі энергетикалық процестер. Толық қуат. Ваттметр
Синусоидалы токтың тізбектеріндегі энергетикалық процестер. Толық қуат. Ваттметр Презентация "Павел Петрович Бажов" - скачать презентации по МХК
Презентация "Павел Петрович Бажов" - скачать презентации по МХК Сущность и задачи статистического анализа данных правовой статистики
Сущность и задачи статистического анализа данных правовой статистики Презентация на тему: «Принципы ухода при поражении органов равновесия»
Презентация на тему: «Принципы ухода при поражении органов равновесия»  Изменение пошлин с учетом вступления в ВТО
Изменение пошлин с учетом вступления в ВТО Леся Українка - геніальна донька українського народу
Леся Українка - геніальна донька українського народу Патентоведение / защита интеллектуальной собственности
Патентоведение / защита интеллектуальной собственности Сущность и социальная роль конфликта
Сущность и социальная роль конфликта Семинар по подготовке судей по гребному слалому 3 категории
Семинар по подготовке судей по гребному слалому 3 категории Продольный разрез паровой турбины Т-250/300-240
Продольный разрез паровой турбины Т-250/300-240 Обработка прерываний
Обработка прерываний Презентация на тему "2-A klasss" - скачать презентации по Педагогике
Презентация на тему "2-A klasss" - скачать презентации по Педагогике Язык программирования Pascal. Ветвление
Язык программирования Pascal. Ветвление Виды моделей
Виды моделей Система согласных
Система согласных Оператор ветвления (условный оператор)
Оператор ветвления (условный оператор) Волейбол сидячий
Волейбол сидячий Государство и его функции (обществознание)
Государство и его функции (обществознание) Непрерывные случайные величины: законы распределения, числовые характеристики
Непрерывные случайные величины: законы распределения, числовые характеристики