- Использование эффекта Доплера в радиолокации

Содержание
- 2. Как используется эффект Доплера? Для измерения радиальной скорости цели (скорость можно измерить и косвенно: определив две
- 3. Когерентно-импульсная РЛС с фазовым детектором на ПЧ Эффект Доплера относительно слабый. Удобнее его выделить на fПЧ,
- 4. «Слепые» скорости Эффект наблюдается в когерентно-импульсной РЛС (отсутствует в случае непрерывных колебаний). На рисунке показаны зондирующие
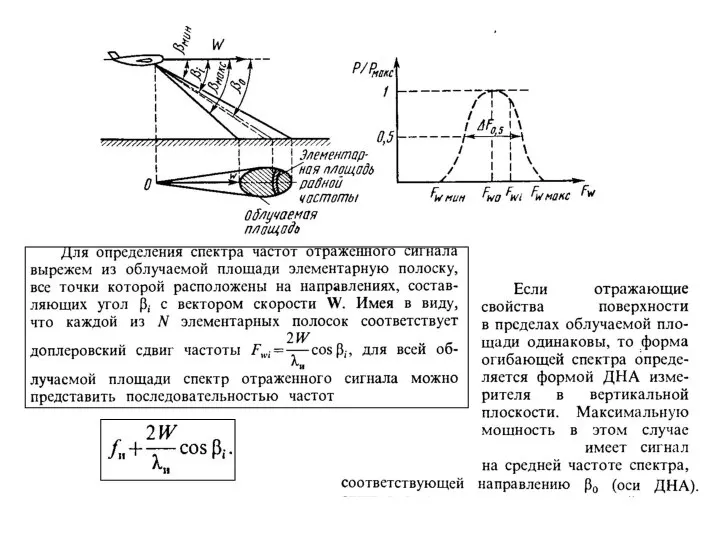
- 5. Доплеровский измеритель скорости и угла сноса (ДИСС) (это РНС!) Рассмотрим горизонтальный полет: W – путевая скорость;
- 7. Ширина спектра сигнала по уровню половинной мощности: Для измерения путевой скорости ЛА необходимо найти среднюю частоту
- 8. и осью ДНА в момент ее совмещения с направлением вектора путевой скорости, т.е. при Fw =
- 9. ДИСС-7 ДИСС-7 является доплеровским измерителем путевой скорости и угла сноса с непрерывным излучением сигнала, с несимметричной
- 10. ДИСС-7 Антенна Магнетрон
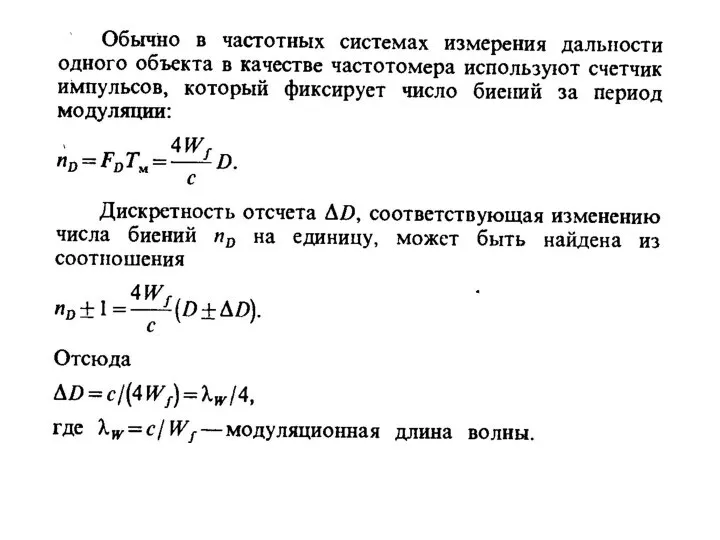
- 11. Радиовысотомер Использует частотный метод определения дальности. Использует непрерывное излучение. (Почему?) Возможно одновременное измерение скорости доплеровским методом.
- 12. f0 – средняя частота; Tм – период модуляции; Wf – девиация частоты; FD – разностная частота
- 15. Малогабаритный авиационный радиовысотомер А-037
- 16. Радионавигационные системы Радионавигационный параметр (РНП) – параметр сигнала, несущий информацию о параметре (координате или скорости) объекта.
- 17. Линия (поверхность) положения Линия (поверхность) положения – геометрическое место точек, отвечающих результатам измерения РНП. Ошибку определения
- 18. Если l – единичный вектор, направленный вдоль нормали к линии положения в сторону роста р, то
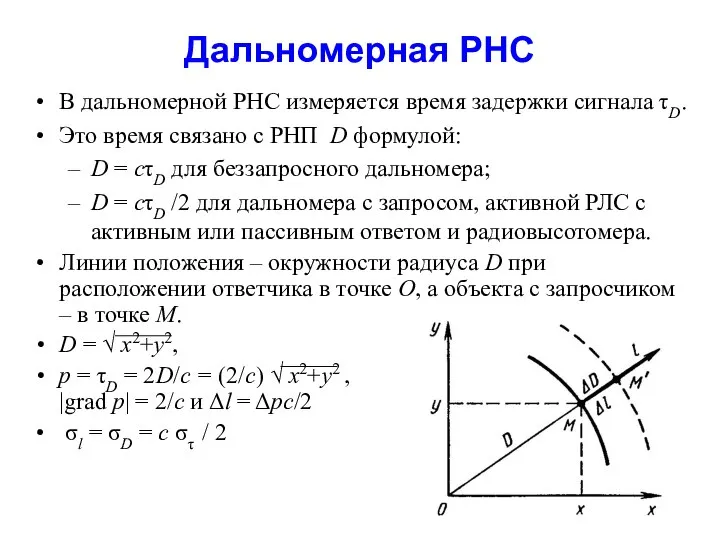
- 19. Дальномерная РНС В дальномерной РНС измеряется время задержки сигнала τD. Это время связано с РНП D
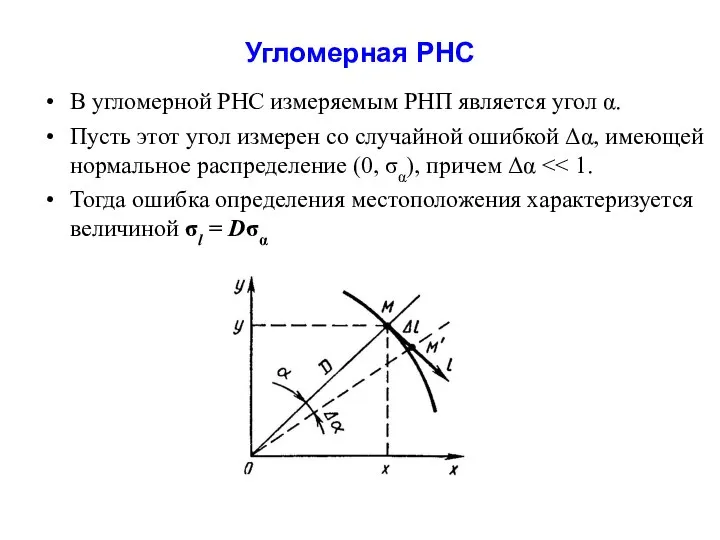
- 20. Угломерная РНС В угломерной РНС измеряемым РНП является угол α. Пусть этот угол измерен со случайной
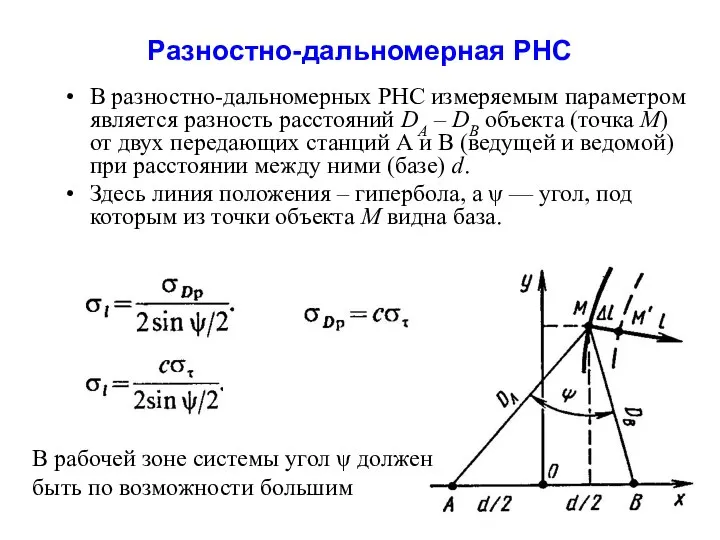
- 21. Разностно-дальномерная РНС В разностно-дальномерных РНС измеряемым параметром является разность расстояний DA – DB объекта (точка M)
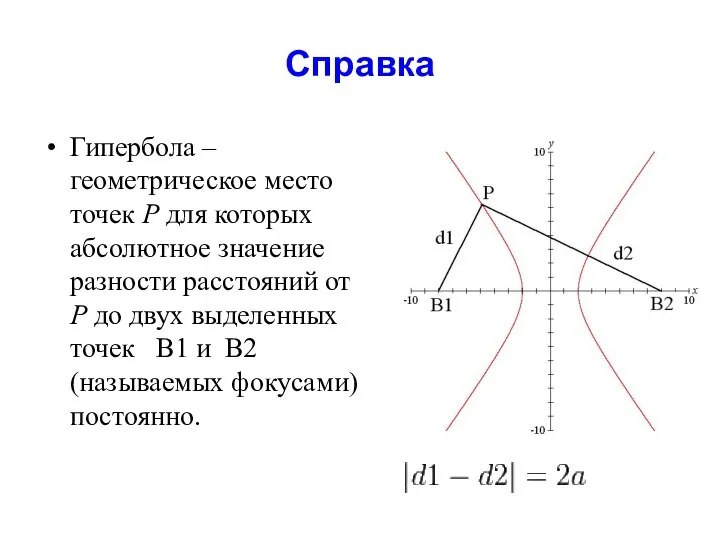
- 22. Справка Гипербола – геометрическое место точек P для которых абсолютное значение разности расстояний от P до
- 23. Определение координат объекта позиционным методом Местоположение объекта при позиционным методое – точка пересечения по крайней мере
- 24. Рабочие зоны РНС Рабочая зона (область) РНС – часть пространства (поверхности), в пределах которой обеспечивается нахождение
- 25. Рабочие зоны дальномерной РНС Запросчик расположен на борту объекта в точке М и работает с двумя
- 26. Рабочие зоны разностно-дальномерной РНС Для определения местоположения объекта М в разностно-дальномерной системе используют по крайней мере
- 27. Примеры простейших угломерных РНС Автоматический радиокомпас Начало работ по созданию автоматических радиокомпасов в СССР относится к
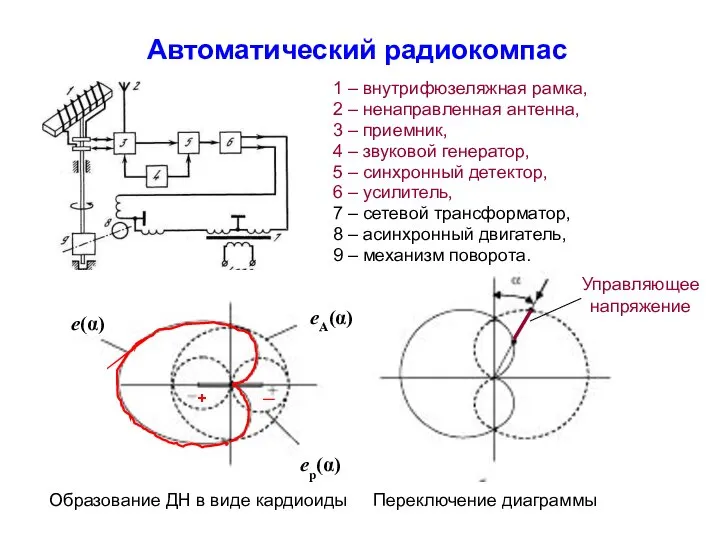
- 28. Автоматический радиокомпас 1 – внутрифюзеляжная рамка, 2 – ненаправленная антенна, 3 – приемник, 4 – звуковой
- 29. Автоматический радиокомпас АРК-9 входит в состав радионавигационного оборудования самолётов Ан-2, Як-18Т, Як-40, вертолётов Ка-26, Ми-2, Ми-8
- 30. Ка-50 Чёрная Акула Пульт управления АРК-22 (в центре) Предусмотрена возможность настройки радиокомпаса на две рабочие частоты
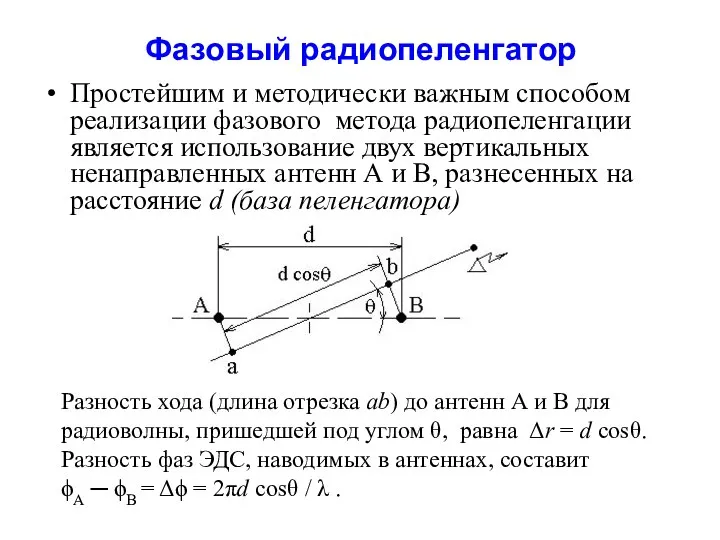
- 31. Фазовый радиопеленгатор Простейшим и методически важным способом реализации фазового метода радиопеленгации является использование двух вертикальных ненаправленных
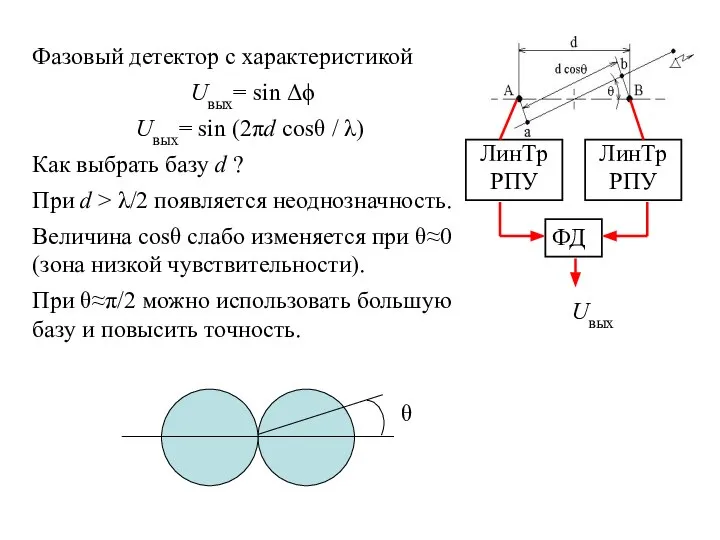
- 32. ФД ЛинТр РПУ ЛинТр РПУ Фазовый детектор с характеристикой Uвых= sin Δϕ Uвых= sin (2πd cosθ
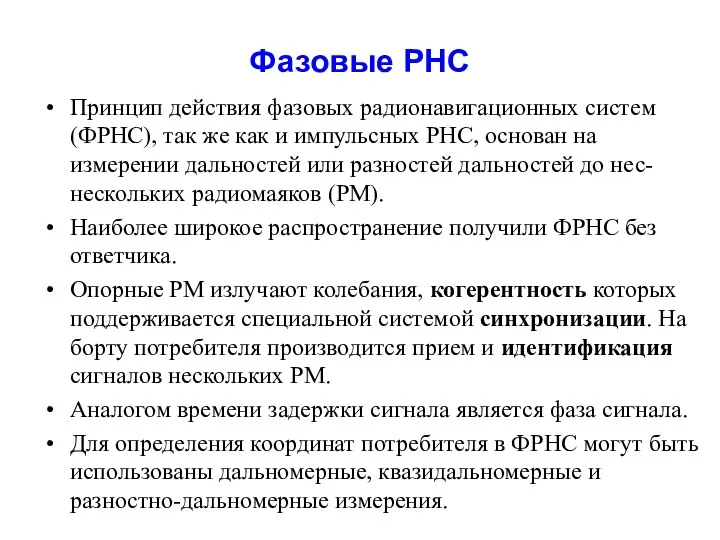
- 33. Фазовые РНС Принцип действия фазовых радионавигационных систем (ФРНС), так же как и импульсных РНС, основан на
- 34. При дальномерных измерениях бортовая шкала времени совмещена со шкалой времени опорных РМ. На объекте может быть
- 35. Принципиальное отличие ФРНС от импульсных РНС заключается в том, что определение дальности или разности дальностей производится
- 36. Одному и тому же значению Δφф отвечает семейство линий положения. Выносится решение о том, что потребитель
- 37. В простейших ФРНС многозначность фазовых измерений устраняется путем непрерывного подсчета целого числа полных фазовых циклов в
- 38. Многочастотные фазовые РНС Классическим примером многочастотных ФРНС являются СДВ-системы, работающие в диапазоне частот (10…15 кГц), что
- 39. Диаграмма излучения сигналов ФРНС «Омега» Наземные опорные РМ синхронизованно излучают импульсные радиосигналы большой длительности (0,9…1,2 с)
- 40. Устранение многозначности В многочастотных ФРНС отдают предпочтение разностно-дальномерным измерениям, что экономически выгодно, так как не требует
- 41. Устранение многозначности Колебания дополнительных частот f1 = 11,33 кГц и f2 = 13,6 кГц позволяют получить
- 42. Применение многоступенчатого алгоритма дает правильное однозначное решение при условиях: ошибка сверхгрубой шкалы не выходит за пределы
- 43. ФРНС «Альфа» (также известная как РСДН-20) – советская система дальней радионавигации, предназначенная для определения координат самолётов,
- 44. Импульсно-фазовые РНС Импульсно-фазовые радионавигационные системы (ИФРНС) длинноволнового диапазона (порядка 100 кГц) обеспечивают дальность действия 1800 …
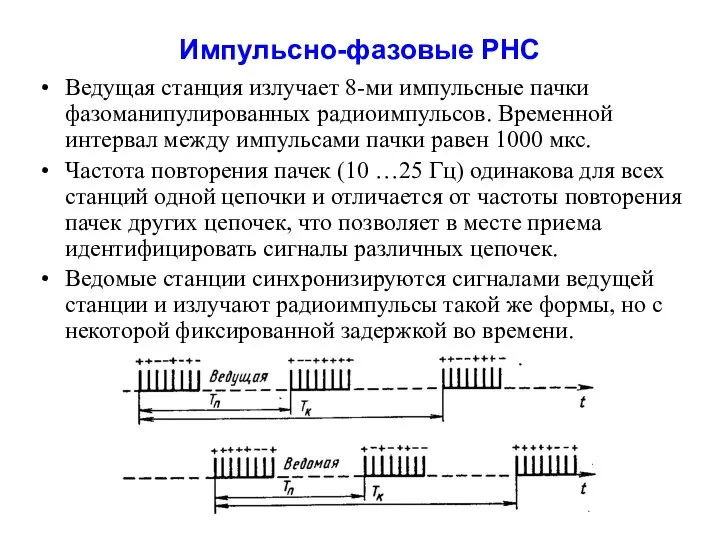
- 45. Импульсно-фазовые РНС Ведущая станция излучает 8-ми импульсные пачки фазоманипулированных радиоимпульсов. Временной интервал между импульсами пачки равен
- 46. Введение задержки обеспечивает временное разделение сигналов ведущей и ведомых станций. Законы фазовой манипуляции радиоимпульсов ведомых станций
- 47. Радиоимпульсы имеют медленно нарастающий фронт длительностью около 80 мкс. В место приема наряду с поверхностной приходит
- 48. «Чайка» — ИФ РНС длинноволнового диапазона, предназначенная для определения координат самолётов и кораблей с ошибкой 50...100
- 49. GRI 8000
- 50. Передатчик LORAN в заливе Кембридж, Канада (189 м) LORAN (LOng RAnge Navigation) — РНС наземного базирования.
- 51. Приемник измеряет время прихода импульсов с точностью 0,1 мкс, и, если используется земная волна, местоположение может
- 52. Спутниковые РНС РМ располагается на ИСЗ ИСЗ – подвижный РМ (недостаток!). Положение РМ при решении радионавигационной
- 53. Выбор орбиты для ИСЗ при построении СРНС Параметры орбит и виды орбит Большая полуось "a". Эксцентриситет
- 54. Выбор орбиты для ИСЗ при построении СРНС Выбор точки запуска При выборе орбиты для СРНС основными
- 55. СРНС первого поколения В 1957 г. под руководством академика В.А.Котельникова экспериментально подтверждена возможность определения параметров движения
- 56. СРНС первого поколения Следовательно ИСЗ можно использовать в качестве РМ, координаты которого хотя и изменяются, но
- 57. ИСЗ излучает гармонические колебания частотой f0. Наблюдатель имеет возможность сравнивать частоту принимаемого от ИСЗ колебания fпр(t)
- 58. Измеряя разность частот fпр(t) – f0 = FД(t) можно построить график функции FД(t). В момент изменения
- 59. Для определения местонахождения наблюдателя, можно использовать зависимость крутизны кривой FД(t) в момент t0 (кривые 1, 2
- 60. Интегральный доплеровский метод спутниковой радионавигации Точность дифференциального метода определяется точностью измерения мгновенного значения доплеровской частоты, которая
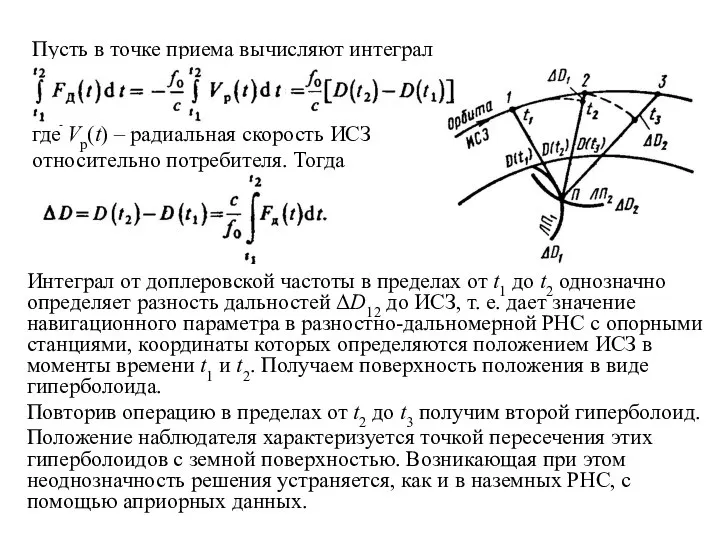
- 61. Пусть в точке приема вычисляют интеграл где Vр(t) – радиальная скорость ИСЗ относительно потребителя. Тогда Интеграл
- 62. Основным условием реализации алгоритмов СРНС первого поколения является точная привязка результатов измерения РНП к единой шкале
- 63. Первая отечественная низкоорбитальная РНС «Цикада» - начало работ в 1963 году. В 1967 году на орбиту
- 64. ИСЗ расположены на круговых полярных орбитах высотой около 1100 км и имеют период обращения около 107
- 65. В СРНС «Транзит» применяют два высокочастотных сигнала: основной (400 МГц) и вспомогательный (150 МГц), что дает
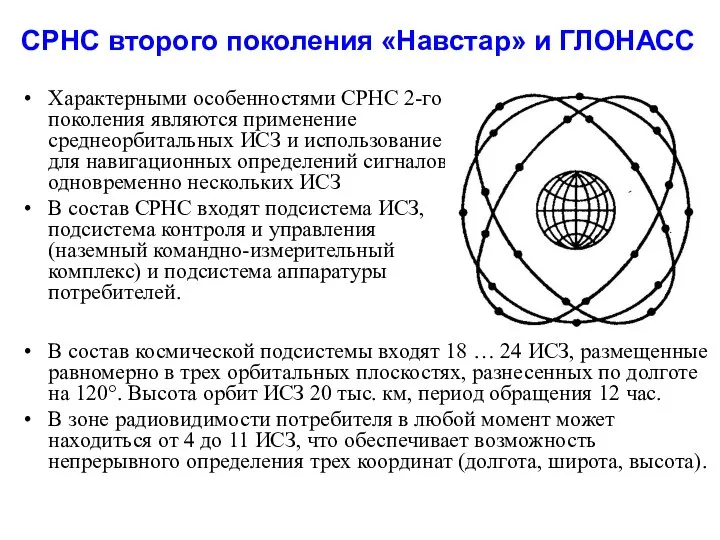
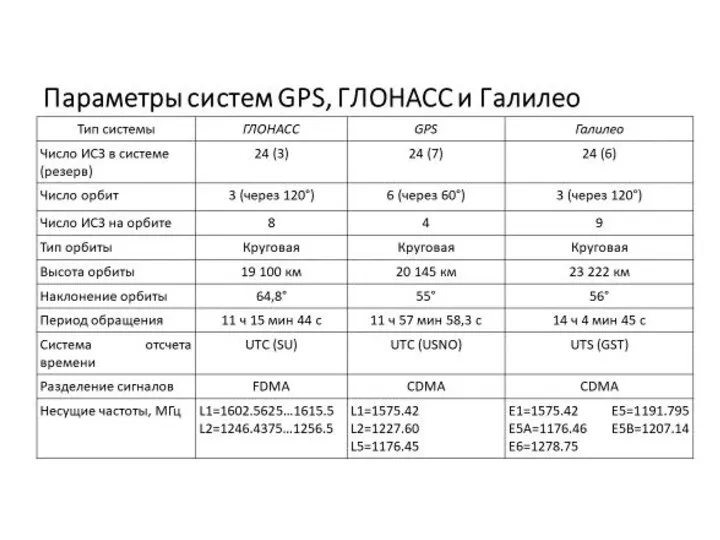
- 66. СРНС второго поколения «Навстар» и ГЛОНАСС Характерными особенностями СРНС 2-го поколения являются применение среднеорбитальных ИСЗ и
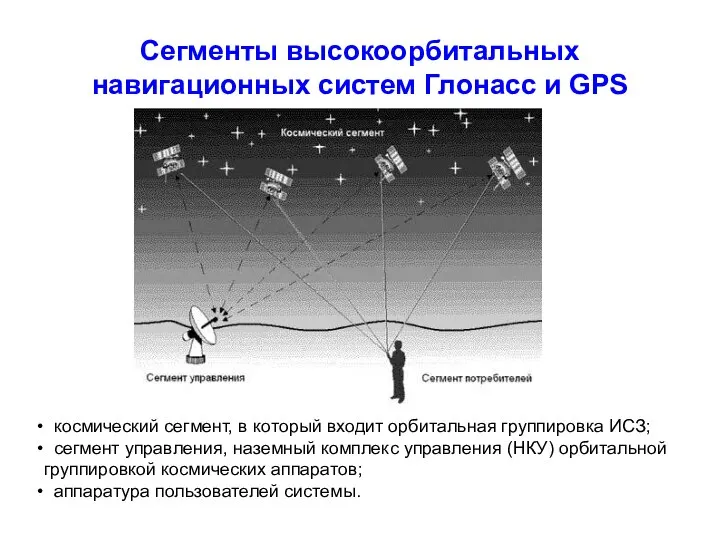
- 67. Сегменты высокоорбитальных навигационных систем Глонасс и GPS космический сегмент, в который входит орбитальная группировка ИСЗ; сегмент
- 68. В системе ГЛОНАСС используются ИСЗ, вращающиеся по круговой орбите на высоте ~ 19100 км. Период обращения
- 71. ИСЗ обращаются в шести различных плоскостях, по 4 аппарата в каждой.
- 72. СРНС имеет собственное системное время, хранимое на борту ИСЗ эталонами частоты. Временные шкалы всех ИСЗ согласованы
- 73. Измеряемыми РНП служат время запаздывания и доплеровское смещение частоты принимаемого радионавигационного сигнала относительно его образца, формируемого
- 74. Сегмент наземного комплекса управления системы ГЛОНАСС
- 75. Сегмент наземного комплекса управления системы GPS
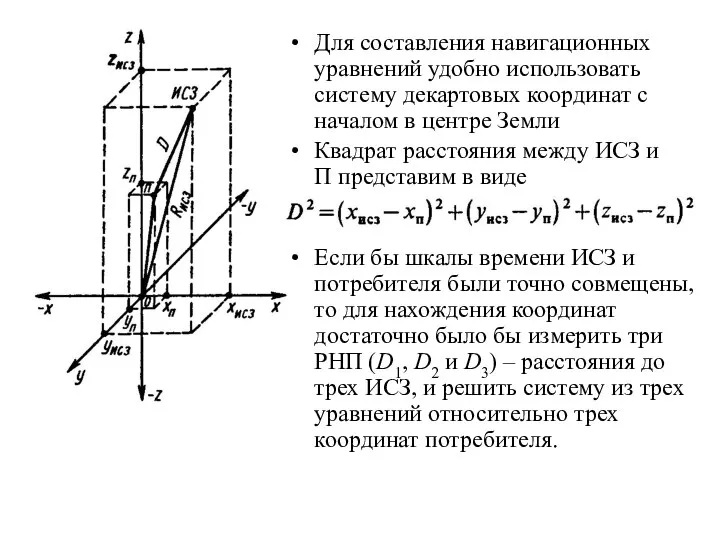
- 76. Для составления навигационных уравнений удобно использовать систему декартовых координат с началом в центре Земли Квадрат расстояния
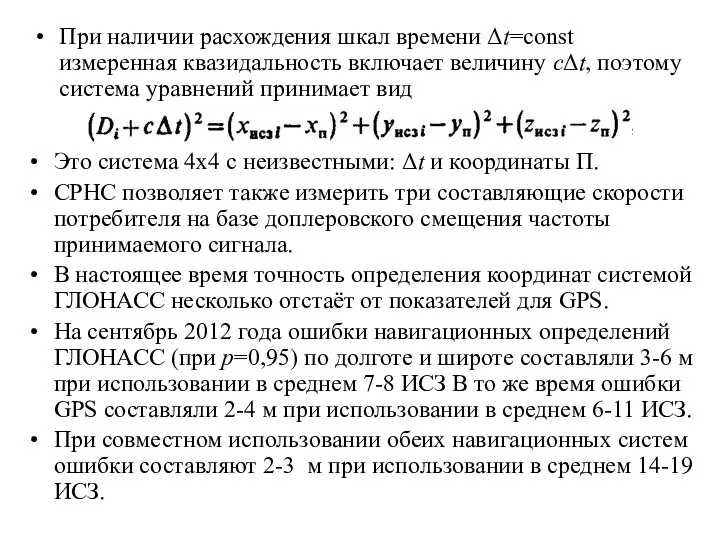
- 77. При наличии расхождения шкал времени Δt=const измеренная квазидальность включает величину cΔt, поэтому система уравнений принимает вид
- 78. Дифференциальный режим СРНС позволяют потребителю получить координаты с точностью порядка 10-15 м. Однако для многих задач,
- 81. Quasi-Zenith Satellite System (QZSS), «Квазизенитная спутниковая система» — проект региональной системы синхронизации времени и одна из
- 84. Скачать презентацию
Как используется эффект Доплера?
Для измерения радиальной скорости цели (скорость можно измерить
Как используется эффект Доплера?
Для измерения радиальной скорости цели (скорость можно измерить
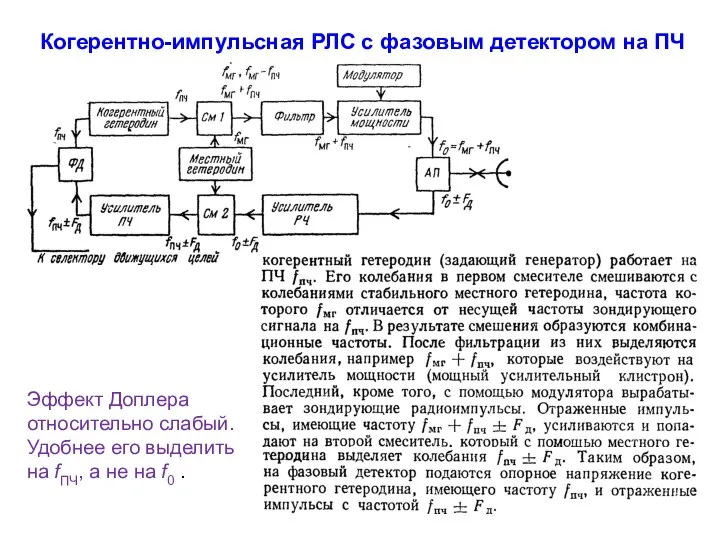
Когерентно-импульсная РЛС с фазовым детектором на ПЧ
Эффект Доплера относительно слабый.
Удобнее
Когерентно-импульсная РЛС с фазовым детектором на ПЧ
Эффект Доплера относительно слабый.
Удобнее
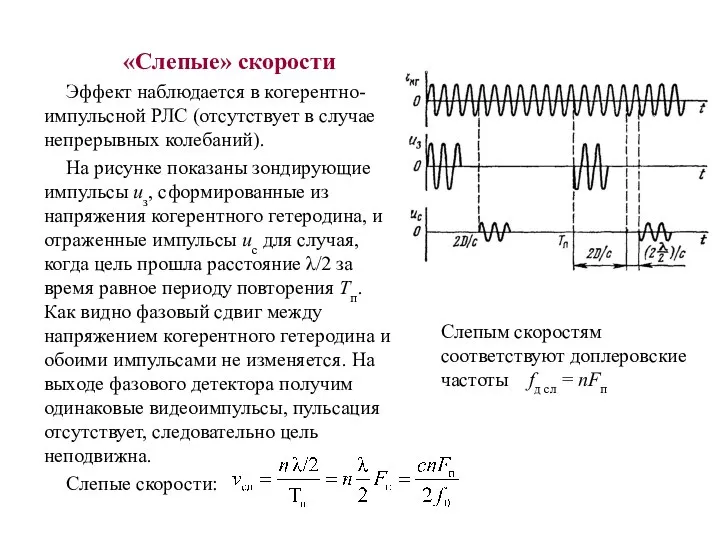
«Слепые» скорости
Эффект наблюдается в когерентно-импульсной РЛС (отсутствует в случае непрерывных колебаний).
На
«Слепые» скорости
Эффект наблюдается в когерентно-импульсной РЛС (отсутствует в случае непрерывных колебаний).
На
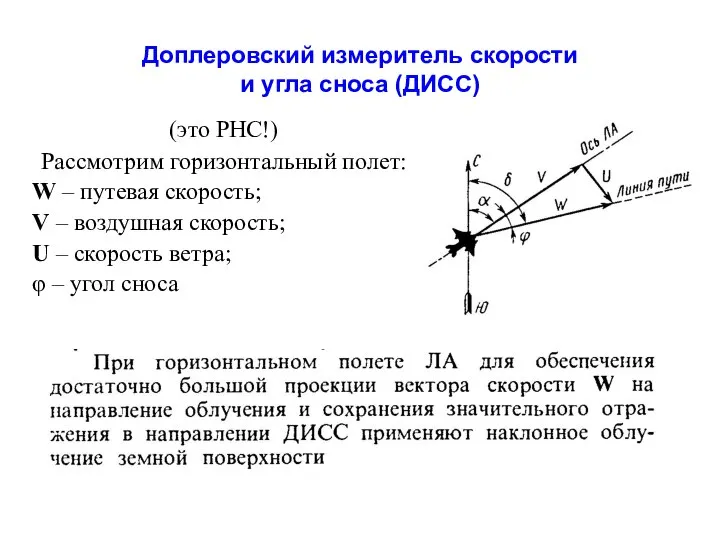
Доплеровский измеритель скорости
и угла сноса (ДИСС)
(это РНС!)
Рассмотрим горизонтальный полет:
W –
Доплеровский измеритель скорости
и угла сноса (ДИСС)
(это РНС!)
Рассмотрим горизонтальный полет:
W –
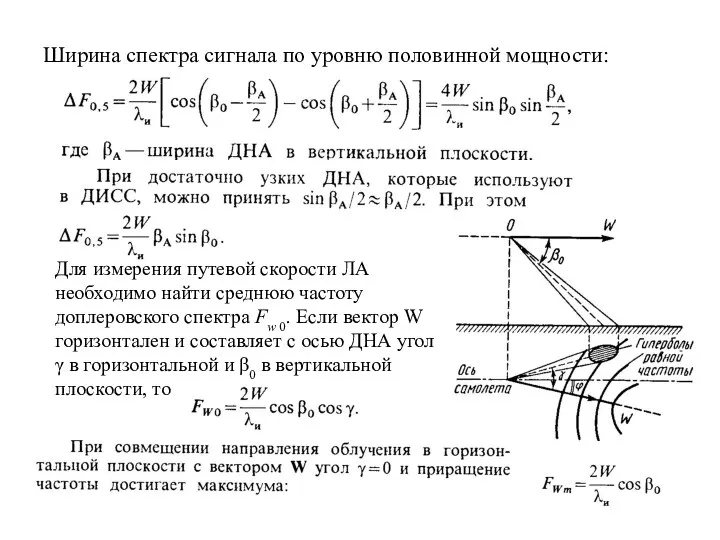
Ширина спектра сигнала по уровню половинной мощности:
Для измерения путевой скорости ЛА
Ширина спектра сигнала по уровню половинной мощности:
Для измерения путевой скорости ЛА
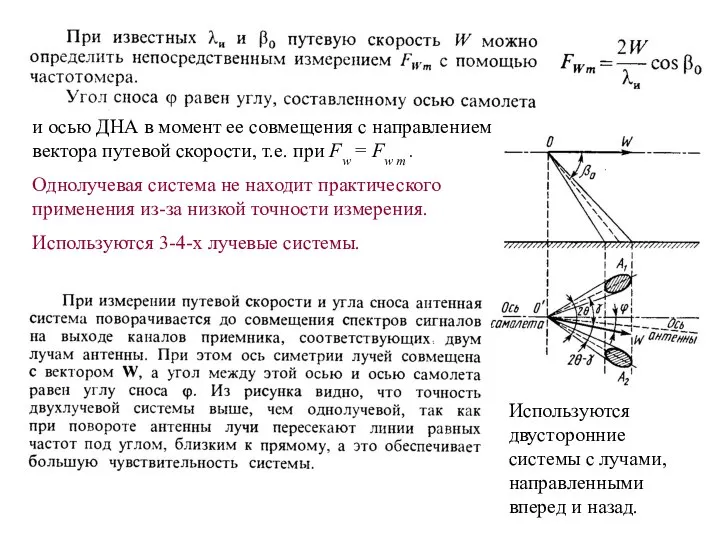
и осью ДНА в момент ее совмещения с направлением вектора путевой
и осью ДНА в момент ее совмещения с направлением вектора путевой
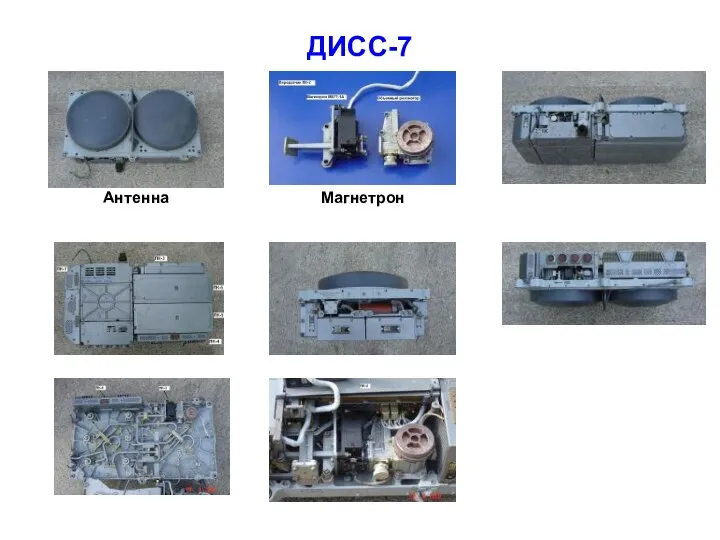
ДИСС-7
ДИСС-7 является доплеровским измерителем путевой скорости и угла сноса с непрерывным
ДИСС-7
ДИСС-7 является доплеровским измерителем путевой скорости и угла сноса с непрерывным
ДИСС-7
Антенна
Магнетрон
ДИСС-7
Антенна
Магнетрон
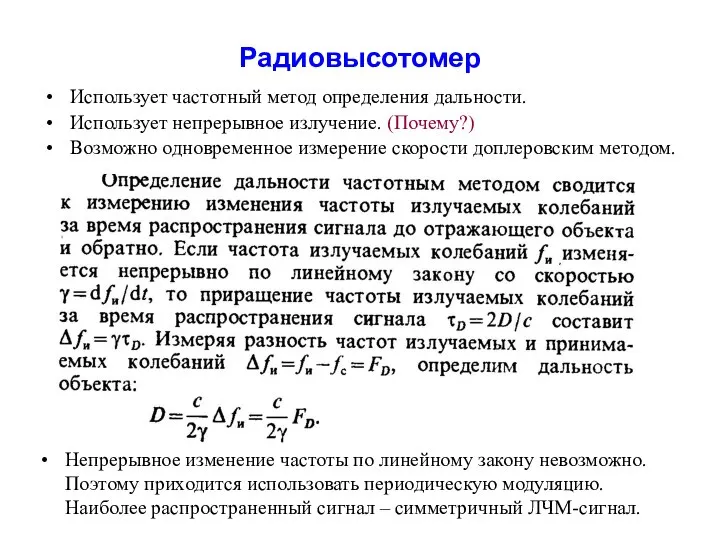
Радиовысотомер
Использует частотный метод определения дальности.
Использует непрерывное излучение. (Почему?)
Возможно одновременное измерение скорости
Радиовысотомер
Использует частотный метод определения дальности.
Использует непрерывное излучение. (Почему?)
Возможно одновременное измерение скорости
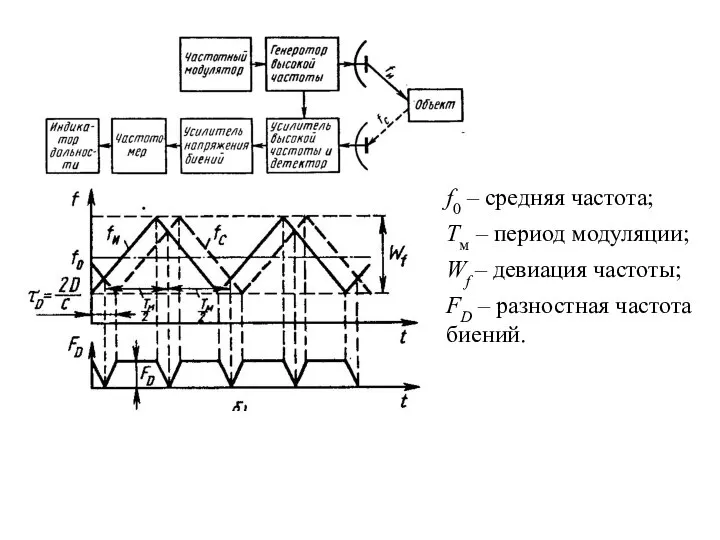
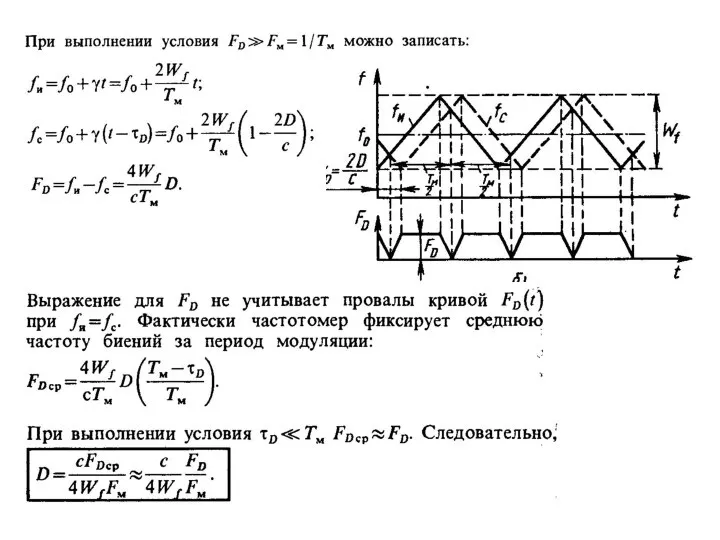
f0 – средняя частота;
Tм – период модуляции;
Wf – девиация частоты;
FD –
f0 – средняя частота;
Tм – период модуляции;
Wf – девиация частоты;
FD –

Малогабаритный авиационный радиовысотомер А-037
Малогабаритный авиационный радиовысотомер А-037
Радионавигационные системы
Радионавигационный параметр (РНП) – параметр сигнала, несущий информацию о параметре
Радионавигационные системы
Радионавигационный параметр (РНП) – параметр сигнала, несущий информацию о параметре
Линия (поверхность) положения
Линия (поверхность) положения – геометрическое место точек, отвечающих результатам
Линия (поверхность) положения
Линия (поверхность) положения – геометрическое место точек, отвечающих результатам
Если l – единичный вектор, направленный вдоль нормали к линии положения
Если l – единичный вектор, направленный вдоль нормали к линии положения
Дальномерная РНС
В дальномерной РНС измеряется время задержки сигнала τD.
Это время связано
Дальномерная РНС
В дальномерной РНС измеряется время задержки сигнала τD.
Это время связано
Угломерная РНС
В угломерной РНС измеряемым РНП является угол α.
Пусть этот
Угломерная РНС
В угломерной РНС измеряемым РНП является угол α.
Пусть этот
Разностно-дальномерная РНС
В разностно-дальномерных РНС измеряемым параметром является разность расстояний DA –
Разностно-дальномерная РНС
В разностно-дальномерных РНС измеряемым параметром является разность расстояний DA –
Справка
Гипербола – геометрическое место точек P для которых абсолютное значение разности
Справка
Гипербола – геометрическое место точек P для которых абсолютное значение разности
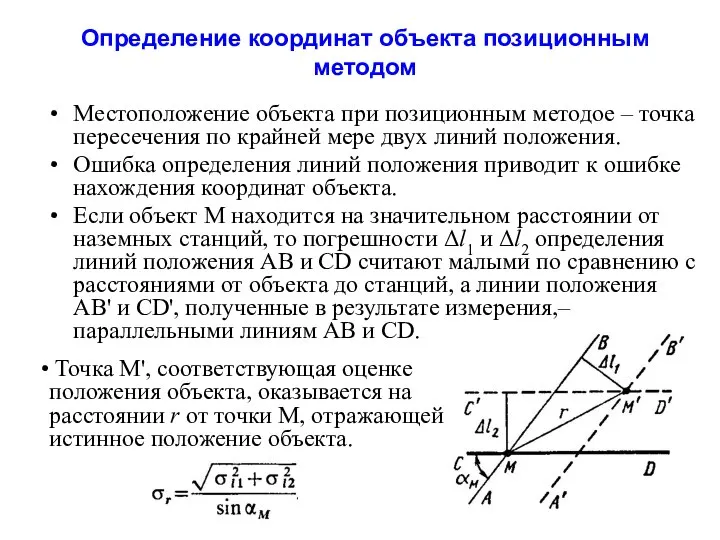
Определение координат объекта позиционным методом
Местоположение объекта при позиционным методое – точка
Определение координат объекта позиционным методом
Местоположение объекта при позиционным методое – точка
Рабочие зоны РНС
Рабочая зона (область) РНС – часть пространства (поверхности), в
Рабочие зоны РНС
Рабочая зона (область) РНС – часть пространства (поверхности), в
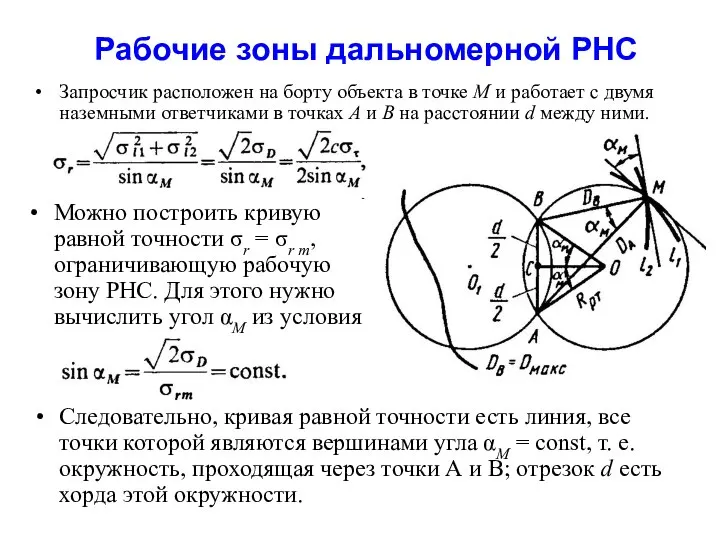
Рабочие зоны дальномерной РНС
Запросчик расположен на борту объекта в точке М
Рабочие зоны дальномерной РНС
Запросчик расположен на борту объекта в точке М
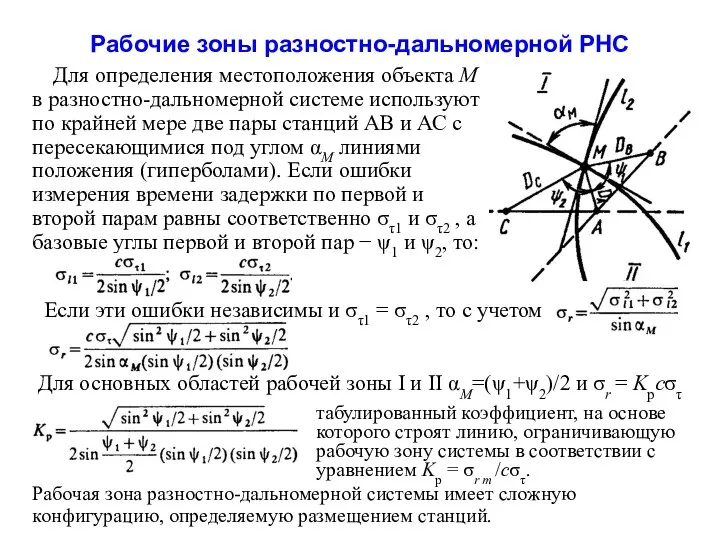
Рабочие зоны разностно-дальномерной РНС
Для определения местоположения объекта М в разностно-дальномерной системе
Рабочие зоны разностно-дальномерной РНС
Для определения местоположения объекта М в разностно-дальномерной системе

Примеры простейших угломерных РНС
Автоматический радиокомпас
Начало работ по созданию автоматических радиокомпасов в
Примеры простейших угломерных РНС
Автоматический радиокомпас
Начало работ по созданию автоматических радиокомпасов в
Автоматический радиокомпас
1 – внутрифюзеляжная рамка,
2 – ненаправленная антенна,
3 –
Автоматический радиокомпас
1 – внутрифюзеляжная рамка,
2 – ненаправленная антенна,
3 –

Автоматический радиокомпас АРК-9 входит в состав радионавигационного оборудования самолётов Ан-2, Як-18Т,
Автоматический радиокомпас АРК-9 входит в состав радионавигационного оборудования самолётов Ан-2, Як-18Т,

Ка-50 Чёрная Акула
Пульт управления АРК-22 (в центре)
Предусмотрена возможность настройки радиокомпаса на
Ка-50 Чёрная Акула
Пульт управления АРК-22 (в центре)
Предусмотрена возможность настройки радиокомпаса на
Фазовый радиопеленгатор
Простейшим и методически важным способом реализации фазового метода радиопеленгации является
Фазовый радиопеленгатор
Простейшим и методически важным способом реализации фазового метода радиопеленгации является
ФД
ЛинТр
РПУ
ЛинТр
РПУ
Фазовый детектор с характеристикой
Uвых= sin Δϕ
Uвых= sin (2πd cosθ
ФД
ЛинТр
РПУ
ЛинТр
РПУ
Фазовый детектор с характеристикой
Uвых= sin Δϕ
Uвых= sin (2πd cosθ
Фазовые РНС
Принцип действия фазовых радионавигационных систем (ФРНС), так же как и
Фазовые РНС
Принцип действия фазовых радионавигационных систем (ФРНС), так же как и
При дальномерных измерениях бортовая шкала времени совмещена со шкалой времени опорных
При дальномерных измерениях бортовая шкала времени совмещена со шкалой времени опорных
Принципиальное отличие ФРНС от импульсных РНС заключается в том, что определение
Принципиальное отличие ФРНС от импульсных РНС заключается в том, что определение
Одному и тому же значению Δφф отвечает семейство линий положения. Выносится
Одному и тому же значению Δφф отвечает семейство линий положения. Выносится
В простейших ФРНС многозначность фазовых измерений устраняется путем непрерывного подсчета целого
В простейших ФРНС многозначность фазовых измерений устраняется путем непрерывного подсчета целого
Многочастотные фазовые РНС
Классическим примером многочастотных ФРНС являются СДВ-системы, работающие в диапазоне
Многочастотные фазовые РНС
Классическим примером многочастотных ФРНС являются СДВ-системы, работающие в диапазоне
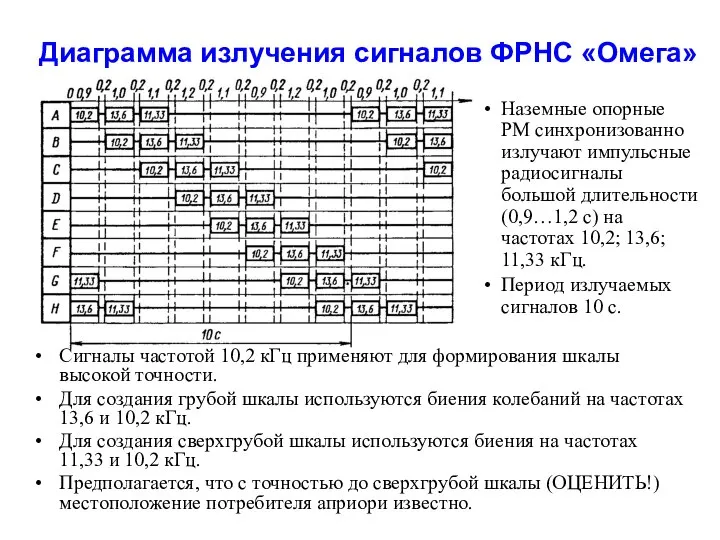
Диаграмма излучения сигналов ФРНС «Омега»
Наземные опорные РМ синхронизованно излучают импульсные радиосигналы
Диаграмма излучения сигналов ФРНС «Омега»
Наземные опорные РМ синхронизованно излучают импульсные радиосигналы

Устранение многозначности
В многочастотных ФРНС отдают предпочтение разностно-дальномерным измерениям, что экономически выгодно,
Устранение многозначности
В многочастотных ФРНС отдают предпочтение разностно-дальномерным измерениям, что экономически выгодно,
Устранение многозначности
Колебания дополнительных частот f1 = 11,33 кГц и f2 =
Устранение многозначности
Колебания дополнительных частот f1 = 11,33 кГц и f2 =
Применение многоступенчатого алгоритма дает правильное однозначное решение при условиях:
ошибка сверхгрубой шкалы
Применение многоступенчатого алгоритма дает правильное однозначное решение при условиях:
ошибка сверхгрубой шкалы
ФРНС «Альфа» (также известная как РСДН-20) – советская система дальней радионавигации, предназначенная
ФРНС «Альфа» (также известная как РСДН-20) – советская система дальней радионавигации, предназначенная
Импульсно-фазовые РНС
Импульсно-фазовые радионавигационные системы (ИФРНС) длинноволнового диапазона (порядка 100 кГц) обеспечивают
Импульсно-фазовые РНС
Импульсно-фазовые радионавигационные системы (ИФРНС) длинноволнового диапазона (порядка 100 кГц) обеспечивают
Импульсно-фазовые РНС
Ведущая станция излучает 8-ми импульсные пачки фазоманипулированных радиоимпульсов. Временной интервал
Импульсно-фазовые РНС
Ведущая станция излучает 8-ми импульсные пачки фазоманипулированных радиоимпульсов. Временной интервал
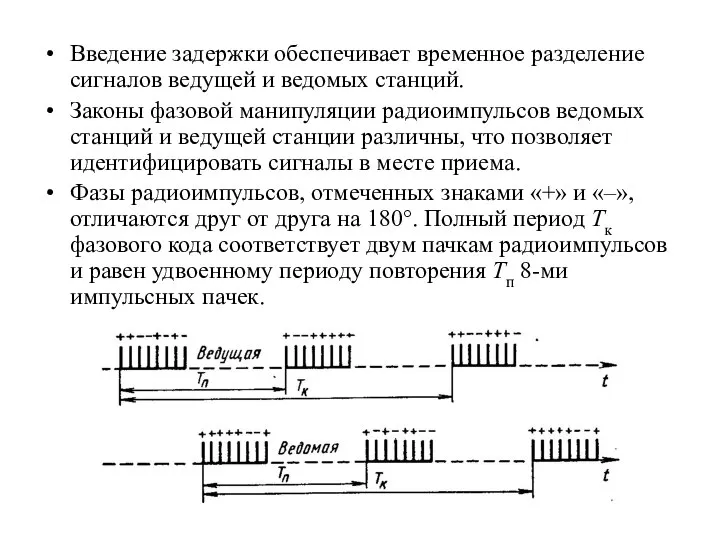
Введение задержки обеспечивает временное разделение сигналов ведущей и ведомых станций.
Законы
Введение задержки обеспечивает временное разделение сигналов ведущей и ведомых станций.
Законы
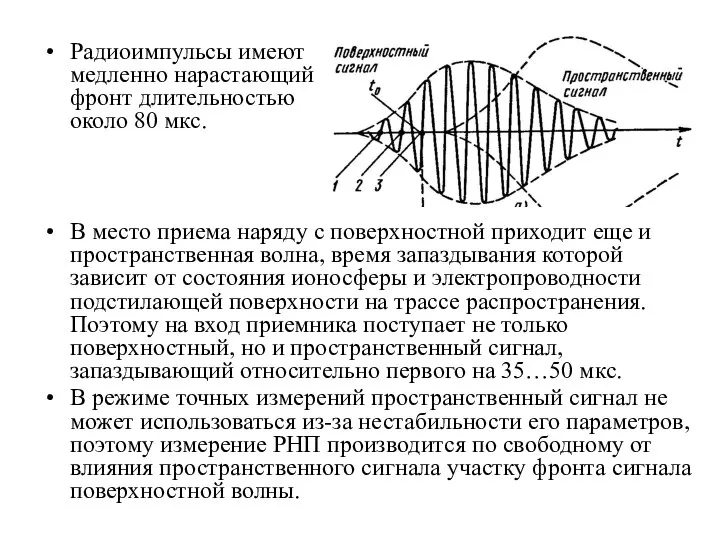
Радиоимпульсы имеют
медленно нарастающий
фронт длительностью
около 80 мкс.
В место
Радиоимпульсы имеют
медленно нарастающий
фронт длительностью
около 80 мкс.
В место
«Чайка» — ИФ РНС длинноволнового диапазона, предназначенная для определения координат самолётов
«Чайка» — ИФ РНС длинноволнового диапазона, предназначенная для определения координат самолётов

GRI 8000
GRI 8000
Передатчик LORAN в заливе Кембридж, Канада (189 м)
LORAN (LOng RAnge Navigation) —
Передатчик LORAN в заливе Кембридж, Канада (189 м)
LORAN (LOng RAnge Navigation) —
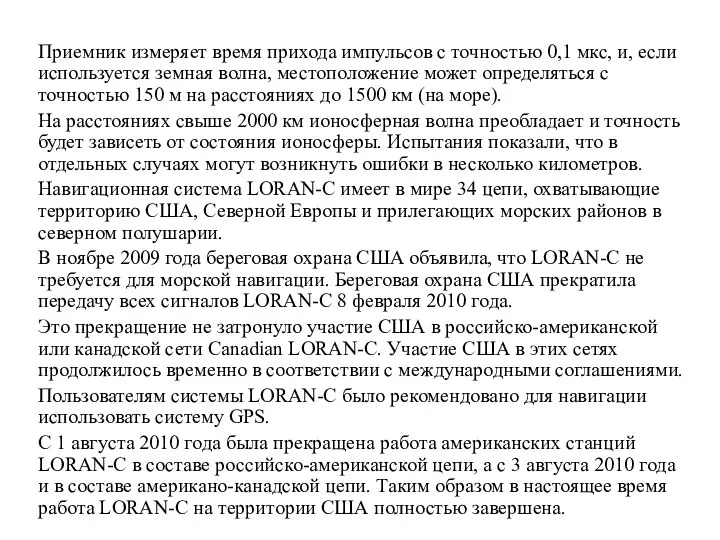
Приемник измеряет время прихода импульсов с точностью 0,1 мкс, и, если
Приемник измеряет время прихода импульсов с точностью 0,1 мкс, и, если
Спутниковые РНС
РМ располагается на ИСЗ
ИСЗ – подвижный РМ (недостаток!). Положение РМ
Спутниковые РНС
РМ располагается на ИСЗ
ИСЗ – подвижный РМ (недостаток!). Положение РМ
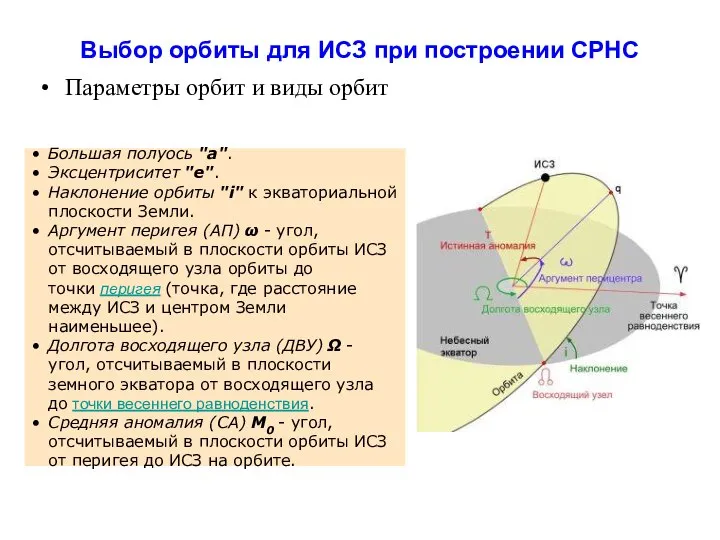
Выбор орбиты для ИСЗ при построении СРНС
Параметры орбит и виды орбит
Большая
Выбор орбиты для ИСЗ при построении СРНС
Параметры орбит и виды орбит
Большая
Выбор орбиты для ИСЗ при построении СРНС
Выбор точки запуска
При выборе орбиты
Выбор орбиты для ИСЗ при построении СРНС
Выбор точки запуска
При выборе орбиты
СРНС первого поколения
В 1957 г. под руководством академика В.А.Котельникова экспериментально подтверждена
СРНС первого поколения
В 1957 г. под руководством академика В.А.Котельникова экспериментально подтверждена
СРНС первого поколения
Следовательно ИСЗ можно использовать в качестве РМ, координаты которого
СРНС первого поколения
Следовательно ИСЗ можно использовать в качестве РМ, координаты которого
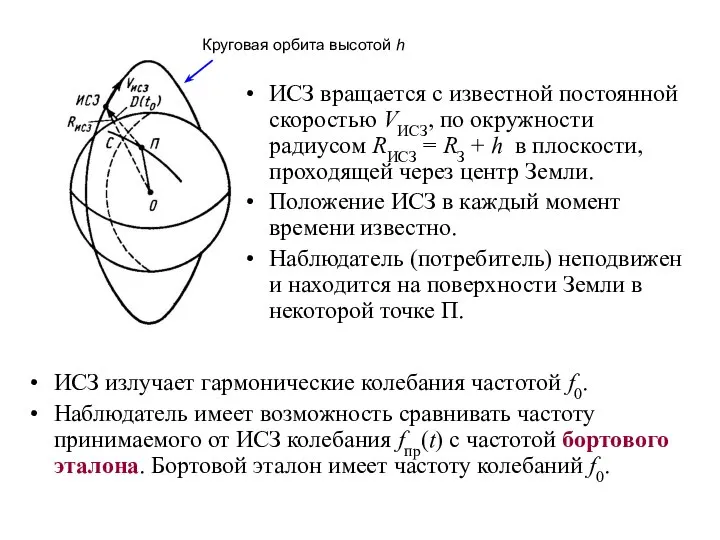
ИСЗ излучает гармонические колебания частотой f0.
Наблюдатель имеет возможность сравнивать частоту принимаемого
ИСЗ излучает гармонические колебания частотой f0.
Наблюдатель имеет возможность сравнивать частоту принимаемого
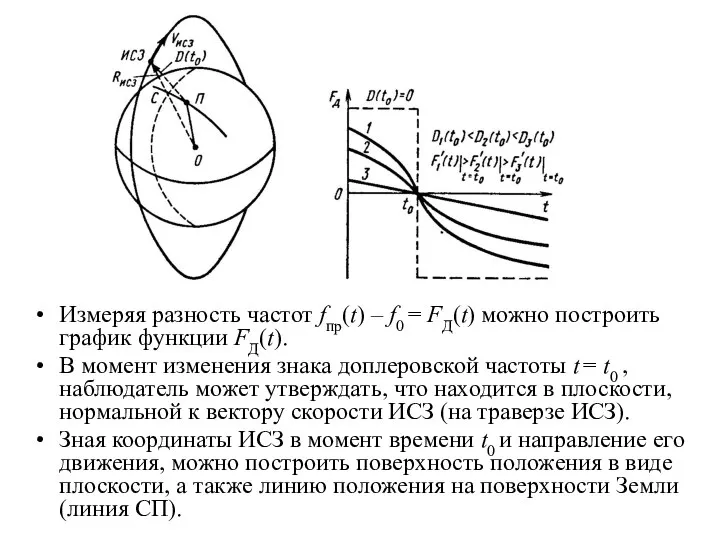
Измеряя разность частот fпр(t) – f0 = FД(t) можно построить график
Измеряя разность частот fпр(t) – f0 = FД(t) можно построить график
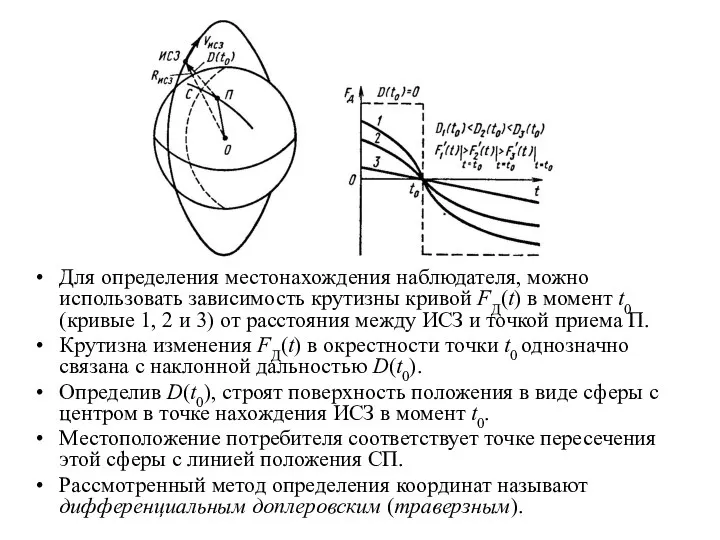
Для определения местонахождения наблюдателя, можно использовать зависимость крутизны кривой FД(t) в
Для определения местонахождения наблюдателя, можно использовать зависимость крутизны кривой FД(t) в
Интегральный доплеровский метод спутниковой радионавигации
Точность дифференциального метода определяется точностью измерения мгновенного
Интегральный доплеровский метод спутниковой радионавигации
Точность дифференциального метода определяется точностью измерения мгновенного
Пусть в точке приема вычисляют интеграл
где Vр(t) – радиальная скорость ИСЗ
Пусть в точке приема вычисляют интеграл
где Vр(t) – радиальная скорость ИСЗ
Основным условием реализации алгоритмов СРНС первого поколения является точная привязка результатов
Основным условием реализации алгоритмов СРНС первого поколения является точная привязка результатов
Первая отечественная низкоорбитальная РНС «Цикада» - начало работ в 1963 году.
Первая отечественная низкоорбитальная РНС «Цикада» - начало работ в 1963 году.
ИСЗ расположены на круговых полярных орбитах высотой около 1100 км и
ИСЗ расположены на круговых полярных орбитах высотой около 1100 км и
В СРНС «Транзит» применяют два высокочастотных сигнала: основной (400 МГц) и
В СРНС «Транзит» применяют два высокочастотных сигнала: основной (400 МГц) и
СРНС второго поколения «Навстар» и ГЛОНАСС
Характерными особенностями СРНС 2-го поколения являются
СРНС второго поколения «Навстар» и ГЛОНАСС
Характерными особенностями СРНС 2-го поколения являются
Сегменты высокоорбитальных навигационных систем Глонасс и GPS
космический сегмент, в который
Сегменты высокоорбитальных навигационных систем Глонасс и GPS
космический сегмент, в который
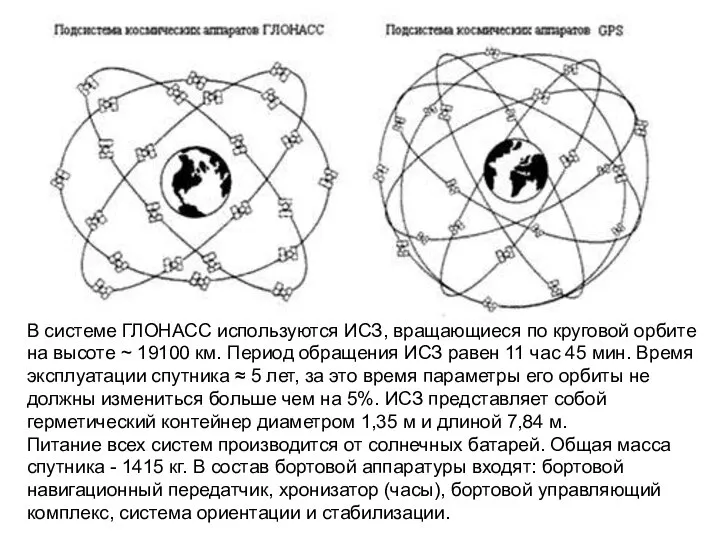
В системе ГЛОНАСС используются ИСЗ, вращающиеся по круговой орбите на высоте
В системе ГЛОНАСС используются ИСЗ, вращающиеся по круговой орбите на высоте
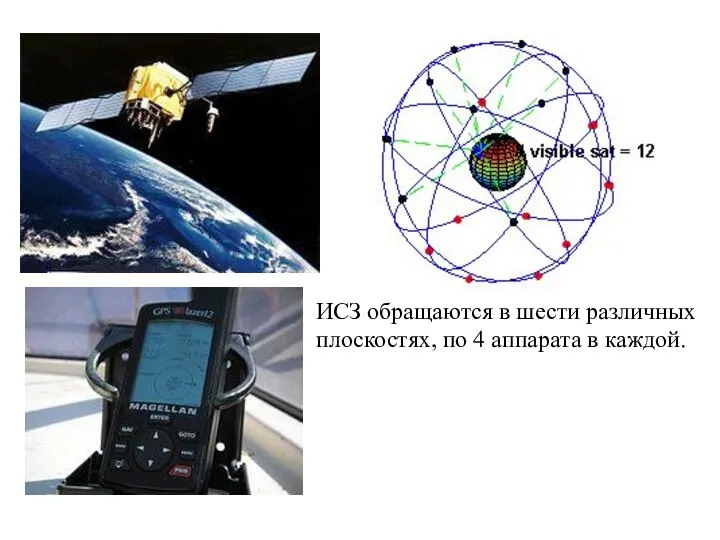
ИСЗ обращаются в шести различных плоскостях, по 4 аппарата в каждой.
ИСЗ обращаются в шести различных плоскостях, по 4 аппарата в каждой.
СРНС имеет собственное системное время, хранимое на борту ИСЗ эталонами частоты.
СРНС имеет собственное системное время, хранимое на борту ИСЗ эталонами частоты.
Измеряемыми РНП служат время запаздывания и доплеровское смещение частоты принимаемого радионавигационного
Измеряемыми РНП служат время запаздывания и доплеровское смещение частоты принимаемого радионавигационного

Сегмент наземного комплекса управления системы ГЛОНАСС
Сегмент наземного комплекса управления системы ГЛОНАСС

Сегмент наземного комплекса управления системы GPS
Сегмент наземного комплекса управления системы GPS
Для составления навигационных уравнений удобно использовать систему декартовых координат с началом
Для составления навигационных уравнений удобно использовать систему декартовых координат с началом
При наличии расхождения шкал времени Δt=const измеренная квазидальность включает величину cΔt,
При наличии расхождения шкал времени Δt=const измеренная квазидальность включает величину cΔt,
Дифференциальный режим
СРНС позволяют потребителю получить координаты с точностью порядка 10-15 м.
Дифференциальный режим
СРНС позволяют потребителю получить координаты с точностью порядка 10-15 м.
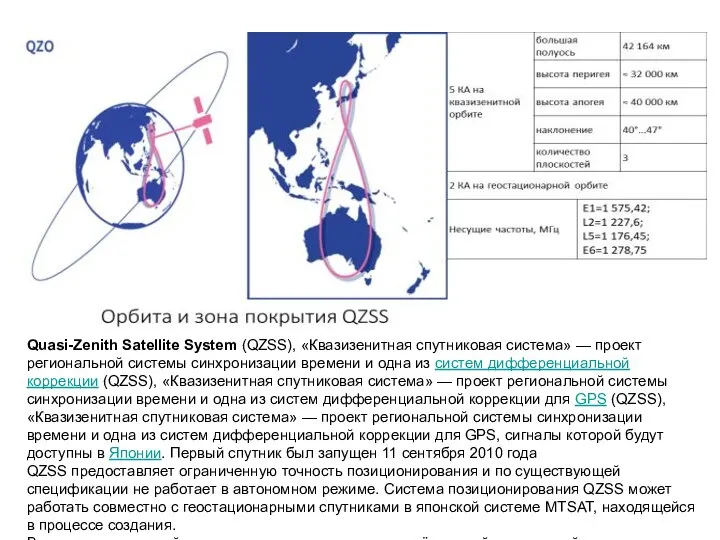
Quasi-Zenith Satellite System (QZSS), «Квазизенитная спутниковая система» — проект региональной системы синхронизации времени
Quasi-Zenith Satellite System (QZSS), «Квазизенитная спутниковая система» — проект региональной системы синхронизации времени
 Понятие архитектуры ЭВМ и общие механизмы функционирования
Понятие архитектуры ЭВМ и общие механизмы функционирования Системный подход к содержанию культуры
Системный подход к содержанию культуры Лекция "О художнике и времени на примере творчества Эдварда Мунка"
Лекция "О художнике и времени на примере творчества Эдварда Мунка" Анамнез в гастроэтерологии
Анамнез в гастроэтерологии Современный урок: каков он? Отбор содержания и методов обучения с целью их адаптации к конкретному контингенту детей.
Современный урок: каков он? Отбор содержания и методов обучения с целью их адаптации к конкретному контингенту детей. Город Благовещенск
Город Благовещенск Политическое развитие СССР в 1920 годы ХХ века. Политическая борьба за власть
Политическое развитие СССР в 1920 годы ХХ века. Политическая борьба за власть Организация экскурсионной работы
Организация экскурсионной работы Парадигмы программирования
Парадигмы программирования Здоровьесберегающая деятельность в образовательном процессе: проблемы и пути их решения
Здоровьесберегающая деятельность в образовательном процессе: проблемы и пути их решения Попович Наталія Іванівна
Попович Наталія Іванівна Презентация по алгебре Теорема синусов
Презентация по алгебре Теорема синусов  Пересечение многогранника с плоскостью
Пересечение многогранника с плоскостью Поглощающие аппараты
Поглощающие аппараты Реконструкция зоны хранения ГСМ аэропорта с увеличением вместимости расходной группы резервуаров
Реконструкция зоны хранения ГСМ аэропорта с увеличением вместимости расходной группы резервуаров Қазақстан Республикасының сайлау жүйесі
Қазақстан Республикасының сайлау жүйесі Аннексии XX века
Аннексии XX века Определители
Определители Эволюция олимпийской символики
Эволюция олимпийской символики Дресс-код для школы
Дресс-код для школы Пишем бизнес-план? Николай Савин MD GrowthUP ns@growthup.com
Пишем бизнес-план? Николай Савин MD GrowthUP ns@growthup.com Готы. Субкультура, зародившаяся в конце 70-х годов XX века в Великобритании
Готы. Субкультура, зародившаяся в конце 70-х годов XX века в Великобритании Сервисные комплексы
Сервисные комплексы Архитектура Древнего Рима
Архитектура Древнего Рима Циклическое нагружение
Циклическое нагружение Основные конфликты одного из СМИ на примере газеты "Завтра"
Основные конфликты одного из СМИ на примере газеты "Завтра" Отделяемые и не отделяемые приставки в немецком языке
Отделяемые и не отделяемые приставки в немецком языке Обряди та соціальні функції тотемізму
Обряди та соціальні функції тотемізму