- ИСТОРИЯ РОБОТОТЕХНИКИ

Содержание
- 2. Утка Вокансона: 1738 Утка французского механика Жака де Вокансона могла воспроизводить довольно большой комплекс различных движений.
- 3. Музыкантша Пьера Дро: 1772 Швейцарские часовщики Пьер Дро и его сын Анри (1772) создали трех андроидов:
- 4. Часы Кулибина: 1790 Иван Петрович Кулибин создает ряд автоматов, в том числе знаменитые часы яичной формы.
- 5. Слово «Робот»: 1921 Чешский писатель Карел Чапек в своей пьесе "R.U.R." ("Rossum's Universal Robots") вводит в
- 6. Робот-лектор: 1933 На выставке "Столетие прогресса" в Чикаго робот используется в качестве лектора. Начиная лекцию о
- 7. Три закона робототехники: 1942 Айзек Азимов впервые использует в своем рассказе "Runaround" слово "робототехника" (robotics) и
- 8. Кибернетика: 1943 В 1943 г. Норберт Винер вместе с Артуро Розенблатом и Джулианом Биглоу вводят в
- 9. Первый промышленный робот: 1954 Джордж Девол разрабатывает первого промышленного программируемого робота и вводит термин Universal Automation,
- 10. Луноход-1: 1970 10 ноября ракета-носитель "Протон-К" вывела на траекторию полета к Луне автоматическую межпланетную станцию "Луна-17"
- 11. Создание ЦНИИ РТК: 1981 Cоздан Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики (ЦНИИ РТК).
- 12. Первый ходячий робот: 1989 Genghis, один из первых ходящих роботов, создан в MIT. Способ ходьбы этого
- 13. Футбол роботов: 1997 Первый футбольный турнир среди роботов RoboCup проводится в Нагойя (Япония). В турнире участвуют
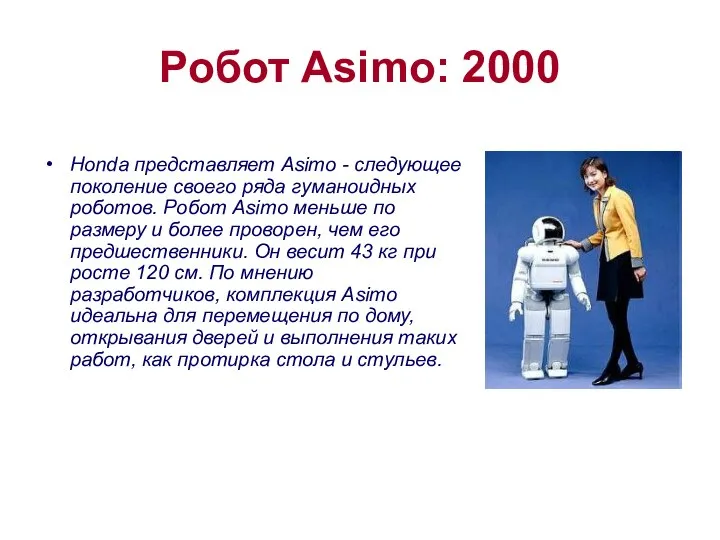
- 14. Робот Asimo: 2000 Honda представляет Asimo - следующее поколение своего ряда гуманоидных роботов. Робот Asimo меньше
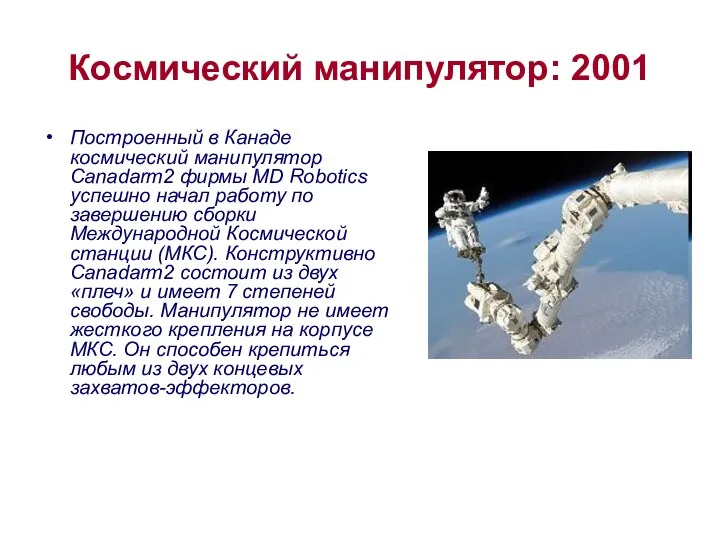
- 15. Космический манипулятор: 2001 Построенный в Канаде космический манипулятор Canadarm2 фирмы MD Robotics успешно начал работу по
- 16. Робот-пылесос: 2002 Первый в мире серийно выпускаемый бытовой робот-пылесос Trilobite представлен на рынок шведской компанией Electrolux.
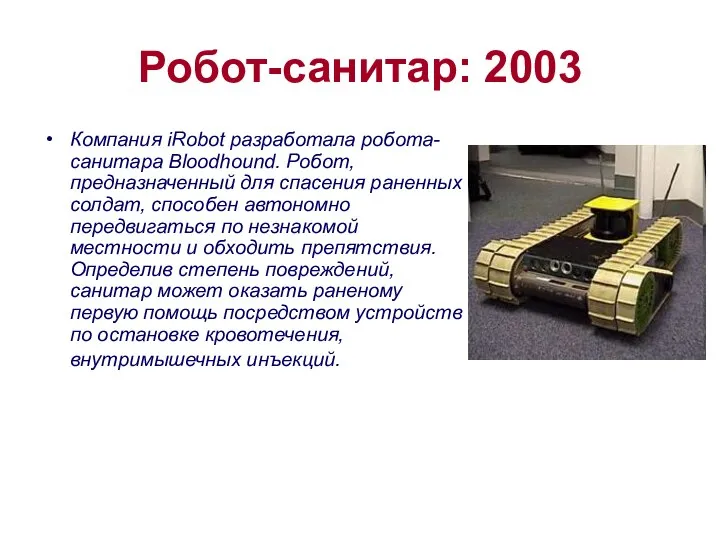
- 17. Робот-санитар: 2003 Компания iRobot разработала робота-санитара Bloodhound. Робот, предназначенный для спасения раненных солдат, способен автономно передвигаться
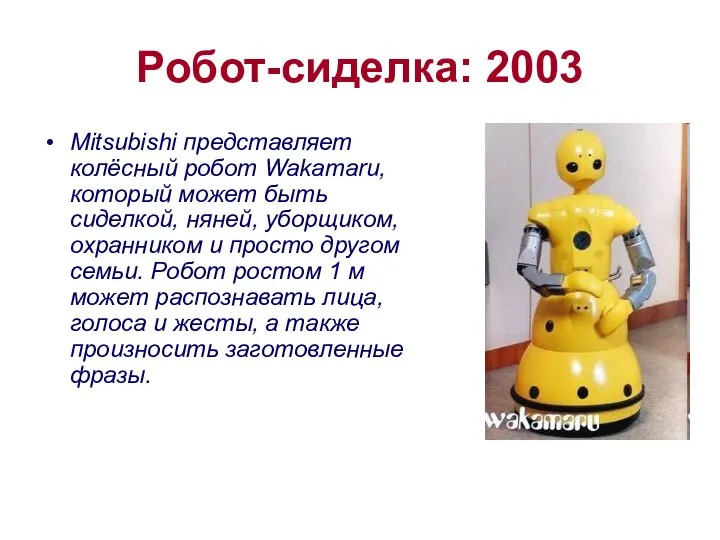
- 18. Робот-сиделка: 2003 Mitsubishi представляет колёсный робот Wakamaru, который может быть сиделкой, няней, уборщиком, охранником и просто
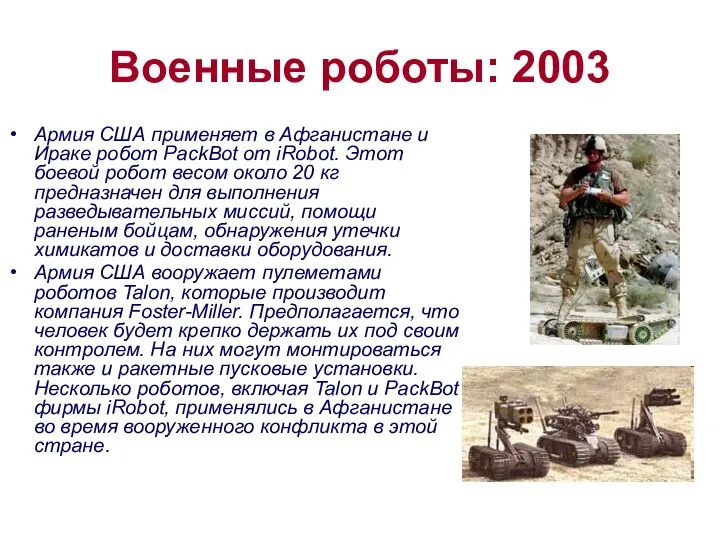
- 19. Военные роботы: 2003 Армия США применяет в Афганистане и Ираке робот PackBot от iRobot. Этот боевой
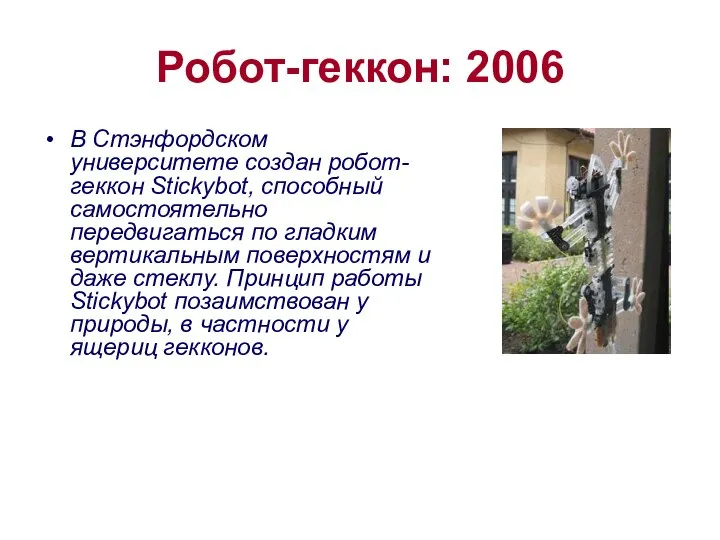
- 20. Робот-геккон: 2006 В Стэнфордском университете создан робот-геккон Stickybot, способный самостоятельно передвигаться по гладким вертикальным поверхностям и
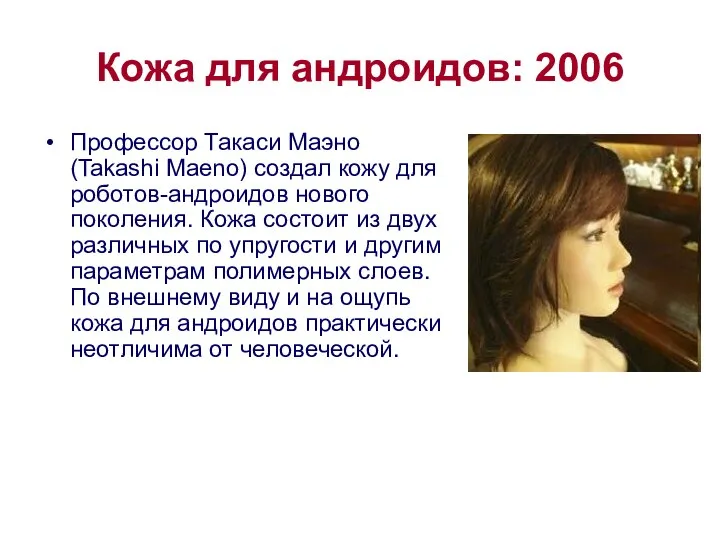
- 21. Кожа для андроидов: 2006 Профессор Такаси Маэно (Takashi Maeno) создал кожу для роботов-андроидов нового поколения. Кожа
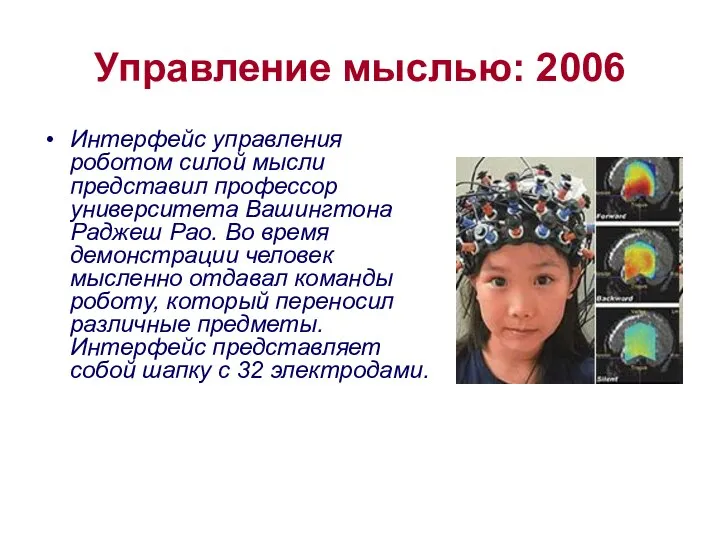
- 22. Управление мыслью: 2006 Интерфейс управления роботом силой мысли представил профессор университета Вашингтона Раджеш Рао. Во время
- 23. Робот-милиционер: 2007 Робот, разработкой которого занимался МГТУ имени Баумана, представляет собой яйцеобразную машину на колесах. Мощность
- 24. Современные роботы В NICT разработан человекоподобный робот Sarcos, понимающий и использующий человеческий язык жестов. Робот оснащен
- 26. Скачать презентацию
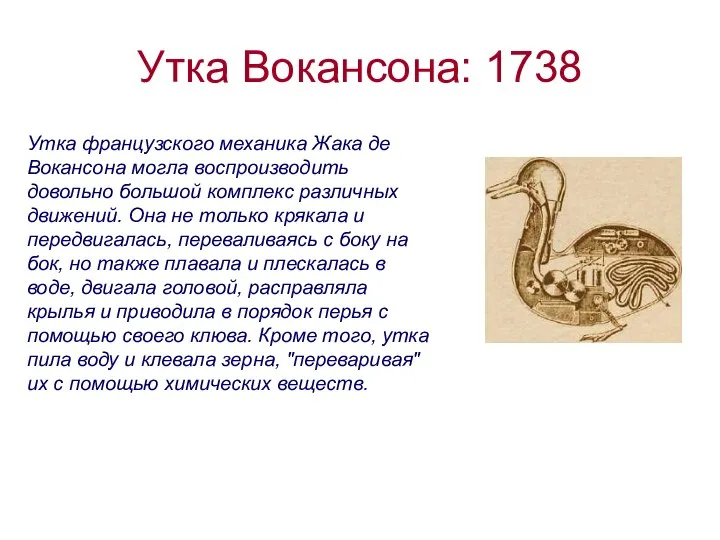
Утка Вокансона: 1738
Утка французского механика Жака де Вокансона могла воспроизводить довольно
Утка Вокансона: 1738
Утка французского механика Жака де Вокансона могла воспроизводить довольно
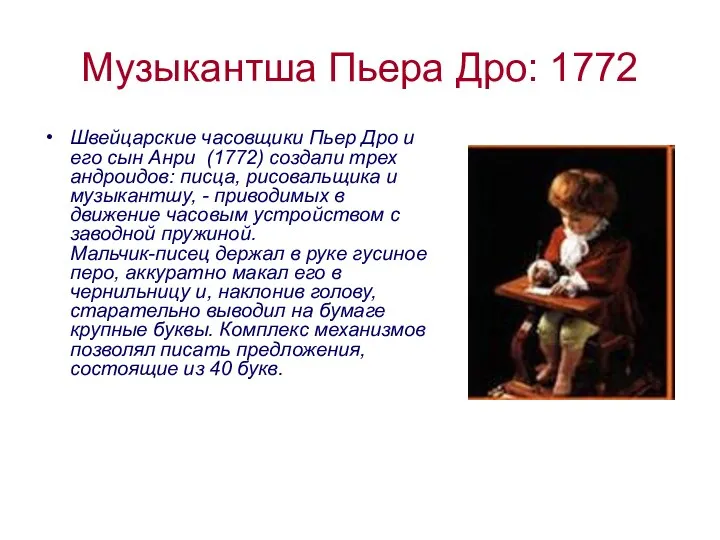
Музыкантша Пьера Дро: 1772
Швейцарские часовщики Пьер Дро и его сын Анри
Музыкантша Пьера Дро: 1772
Швейцарские часовщики Пьер Дро и его сын Анри
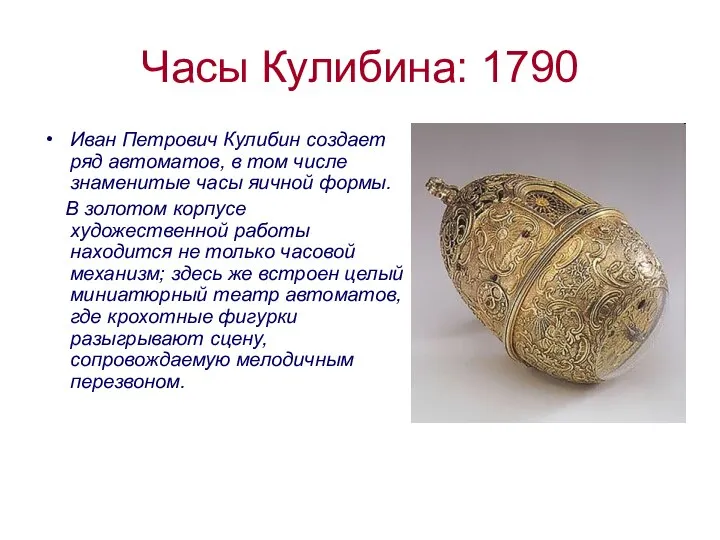
Часы Кулибина: 1790
Иван Петрович Кулибин создает ряд автоматов, в том числе
Часы Кулибина: 1790
Иван Петрович Кулибин создает ряд автоматов, в том числе
Слово «Робот»: 1921
Чешский писатель Карел Чапек в своей пьесе "R.U.R." ("Rossum's
Слово «Робот»: 1921
Чешский писатель Карел Чапек в своей пьесе "R.U.R." ("Rossum's
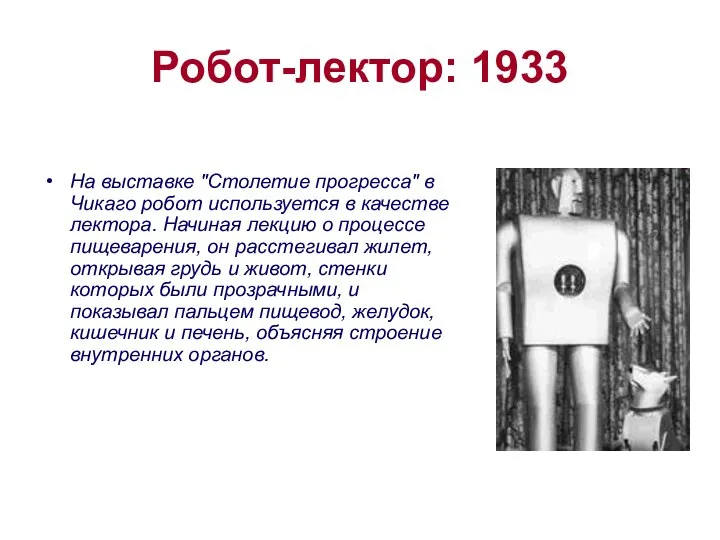
Робот-лектор: 1933
На выставке "Столетие прогресса" в Чикаго робот используется в качестве
Робот-лектор: 1933
На выставке "Столетие прогресса" в Чикаго робот используется в качестве
Три закона робототехники: 1942
Айзек Азимов впервые использует в своем рассказе "Runaround"
Три закона робототехники: 1942
Айзек Азимов впервые использует в своем рассказе "Runaround"
Кибернетика: 1943
В 1943 г. Норберт Винер вместе с Артуро Розенблатом и
Кибернетика: 1943
В 1943 г. Норберт Винер вместе с Артуро Розенблатом и
Первый промышленный робот: 1954
Джордж Девол разрабатывает первого промышленного программируемого робота и
Первый промышленный робот: 1954
Джордж Девол разрабатывает первого промышленного программируемого робота и
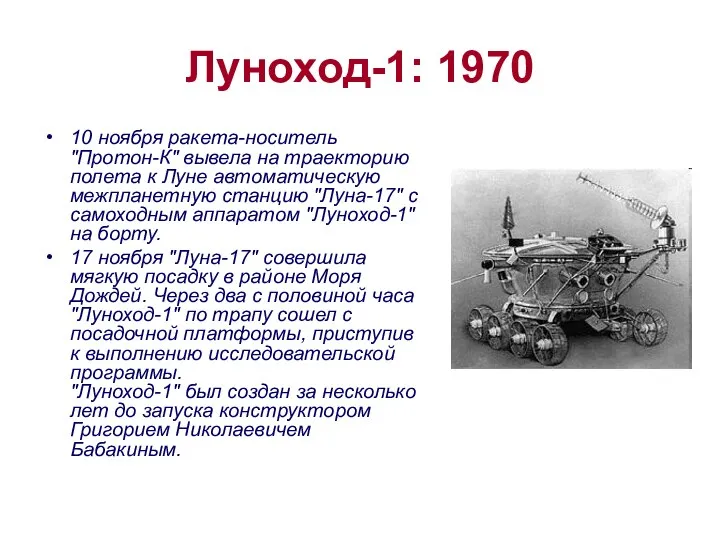
Луноход-1: 1970
10 ноября ракета-носитель "Протон-К" вывела на траекторию полета к Луне
Луноход-1: 1970
10 ноября ракета-носитель "Протон-К" вывела на траекторию полета к Луне
Создание ЦНИИ РТК: 1981
Cоздан Центральный научно-исследовательский и опытно-конструкторский институт робототехники и
Создание ЦНИИ РТК: 1981
Cоздан Центральный научно-исследовательский и опытно-конструкторский институт робототехники и
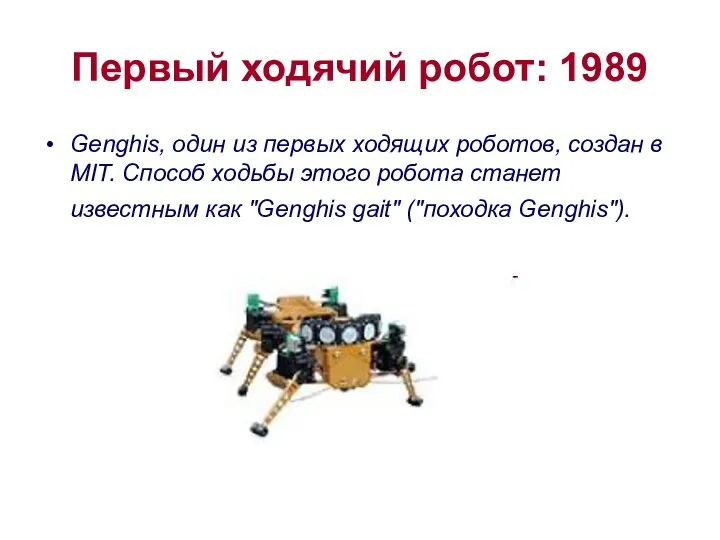
Первый ходячий робот: 1989
Genghis, один из первых ходящих роботов, создан в
Первый ходячий робот: 1989
Genghis, один из первых ходящих роботов, создан в
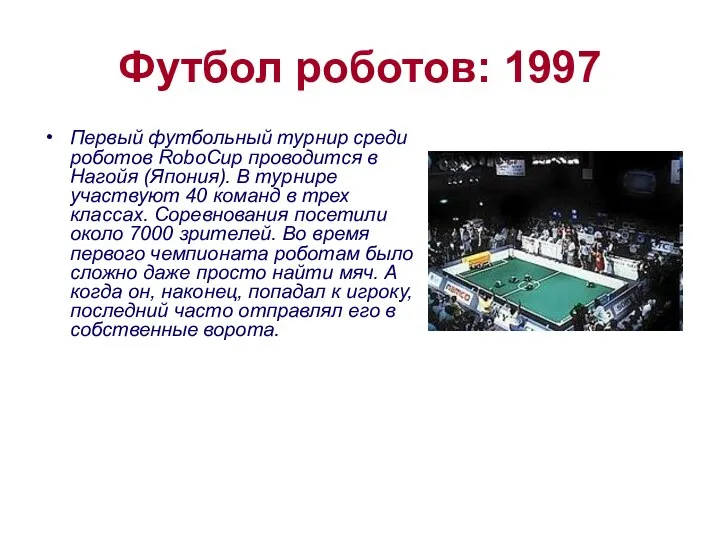
Футбол роботов: 1997
Первый футбольный турнир среди роботов RoboCup проводится в Нагойя
Футбол роботов: 1997
Первый футбольный турнир среди роботов RoboCup проводится в Нагойя
Робот Asimo: 2000
Honda представляет Asimo - следующее поколение своего ряда гуманоидных
Робот Asimo: 2000
Honda представляет Asimo - следующее поколение своего ряда гуманоидных
Космический манипулятор: 2001
Построенный в Канаде космический манипулятор Canadarm2 фирмы MD Robotics
Космический манипулятор: 2001
Построенный в Канаде космический манипулятор Canadarm2 фирмы MD Robotics

Робот-пылесос: 2002
Первый в мире серийно выпускаемый бытовой робот-пылесос Trilobite представлен на
Робот-пылесос: 2002
Первый в мире серийно выпускаемый бытовой робот-пылесос Trilobite представлен на
Робот-санитар: 2003
Компания iRobot разработала робота-санитара Bloodhound. Робот, предназначенный для спасения раненных
Робот-санитар: 2003
Компания iRobot разработала робота-санитара Bloodhound. Робот, предназначенный для спасения раненных
Робот-сиделка: 2003
Mitsubishi представляет колёсный робот Wakamaru, который может быть сиделкой, няней,
Робот-сиделка: 2003
Mitsubishi представляет колёсный робот Wakamaru, который может быть сиделкой, няней,
Военные роботы: 2003
Армия США применяет в Афганистане и Ираке робот PackBot
Военные роботы: 2003
Армия США применяет в Афганистане и Ираке робот PackBot
Робот-геккон: 2006
В Стэнфордском университете создан робот-геккон Stickybot, способный самостоятельно передвигаться по
Робот-геккон: 2006
В Стэнфордском университете создан робот-геккон Stickybot, способный самостоятельно передвигаться по
Кожа для андроидов: 2006
Профессор Такаси Маэно (Takashi Maeno) создал кожу для
Кожа для андроидов: 2006
Профессор Такаси Маэно (Takashi Maeno) создал кожу для
Управление мыслью: 2006
Интерфейс управления роботом силой мысли представил профессор университета Вашингтона
Управление мыслью: 2006
Интерфейс управления роботом силой мысли представил профессор университета Вашингтона
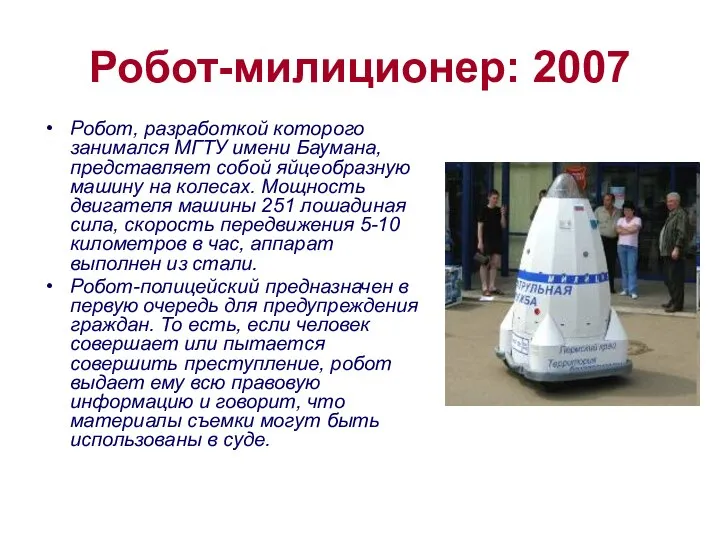
Робот-милиционер: 2007
Робот, разработкой которого занимался МГТУ имени Баумана, представляет собой яйцеобразную
Робот-милиционер: 2007
Робот, разработкой которого занимался МГТУ имени Баумана, представляет собой яйцеобразную

Современные роботы
В NICT разработан человекоподобный робот Sarcos, понимающий и использующий человеческий
Современные роботы
В NICT разработан человекоподобный робот Sarcos, понимающий и использующий человеческий
 Задача На производство одной тонны металла на первом за­воде затрачивают десять часов, а на другом заводе - шесть часов. На ка
Задача На производство одной тонны металла на первом за­воде затрачивают десять часов, а на другом заводе - шесть часов. На ка Модуль числа 8 класс
Модуль числа 8 класс  Шамсутдин род.1788г. Хуснутдин род.1828г. Маулюкей род.1832г. Камалютдин род.1825г. Гайнулхаят род.1839г. Сахипзямал род.1835г. Жомагул Тазетдин
Шамсутдин род.1788г. Хуснутдин род.1828г. Маулюкей род.1832г. Камалютдин род.1825г. Гайнулхаят род.1839г. Сахипзямал род.1835г. Жомагул Тазетдин  Алгоритм ветвление
Алгоритм ветвление Комплексное управление информационной инфраструктурой на основе системы Unicenter
Комплексное управление информационной инфраструктурой на основе системы Unicenter  Определение культуры
Определение культуры Общие теоремы динамики системы
Общие теоремы динамики системы Релейная защита и автоматизация ЭЭС
Релейная защита и автоматизация ЭЭС Внешняя политика Ельцина Бориса Николаевича
Внешняя политика Ельцина Бориса Николаевича Узлы в технике SRT
Узлы в технике SRT лев гумилев отчет1
лев гумилев отчет1 Графики тригонометрических функций
Графики тригонометрических функций  Мировая экономика: характеристика, механизм, этапы и тенденции развития
Мировая экономика: характеристика, механизм, этапы и тенденции развития Позиционирование объекта в закрытом пространстве
Позиционирование объекта в закрытом пространстве ТОО "VIVA-Мастер" – авторизованный сервисный центр Pentax Medical в Казахстане
ТОО "VIVA-Мастер" – авторизованный сервисный центр Pentax Medical в Казахстане Презентация "«Права и обязанности потребителей»" - скачать презентации по Экономике
Презентация "«Права и обязанности потребителей»" - скачать презентации по Экономике Проекционное черчение
Проекционное черчение  Презентация "Фондовая биржа, организация биржевой деятельности" - скачать презентации по Экономике
Презентация "Фондовая биржа, организация биржевой деятельности" - скачать презентации по Экономике Функции и методы управления в строительстве
Функции и методы управления в строительстве Цепи формирования и преобразования импульсов
Цепи формирования и преобразования импульсов Формулы приведения
Формулы приведения Кино, кино, кино… Из истории кинематографа
Кино, кино, кино… Из истории кинематографа Физическое воспитание детей старшего школьного возраста
Физическое воспитание детей старшего школьного возраста Angela Merkel
Angela Merkel Принципы построения параллельных вычислительных систем
Принципы построения параллельных вычислительных систем МИР ВИЗАНТИЙСКОЙ КУЛЬТУРЫ
МИР ВИЗАНТИЙСКОЙ КУЛЬТУРЫ  Г.Скребицкий «Жаворонок» Песенка-закличка
Г.Скребицкий «Жаворонок» Песенка-закличка  PHP. Функции. Списки параметров переменной длины
PHP. Функции. Списки параметров переменной длины