Кинематическая схема привода технологической машины. Обозначения элементов привода на кинематических схемах
- Кинематическая схема привода технологической машины. Обозначения элементов привода на кинематических схемах

Содержание
- 2. Источник движения
- 3. Передача гибкой связью (клиноременная)
- 4. Передача зацеплением (цепная)
- 5. Передача зацеплением (зубчатая цилиндрическая)
- 6. Передача зацеплением (зубчатая коническая)
- 7. Передача зацеплением (червячная)
- 8. жесткая упругая МУФТЫ
- 9. Цилиндрический редуктор
- 10. Конический редуктор
- 11. Коническо-цилиндрический редуктор
- 12. Червячный редуктор
- 13. Рабочие органы машин Цепной транспортер Обозначение на кинематической схеме
- 14. Ленточный транспортер Рабочие органы машин Обозначение на кинематической схеме
- 15. Винтовой (шнековый) транспортер Обозначение на кинематической схеме а – горизонтальный транспортер б - вертикальный транспортер Рабочие
- 16. Рабочие органы машин Грузоподъемное устройство (таль) Обозначение на кинематической схеме
- 17. Составить кинематическую схему для привода, состоящего из электродвигателя, упругой муфты и червячного редуктора Кинематическая схема привода
- 18. Составить кинематическую схему для привода, состоящего из двигателя, упругой муфты, цилиндрического редуктора, цепной передачи и приводного
- 19. Привод, состоящий из двигателя, упругой муфты, цилиндрического редуктора и цепной передачи Кинематическая схема привода М
- 20. Кинематическая схема привода Привод, состоящий из электродвигателя, упругой муфты, цилиндрического редуктора и клиноременной передачи
- 21. Задание: Составить кинематическую схему привода ленточного транспортера, состоящего из электродвигателя, упругой муфты, коническо-цилиндрического редуктора и клиноременной
- 23. Скачать презентацию

Источник движения
Источник движения
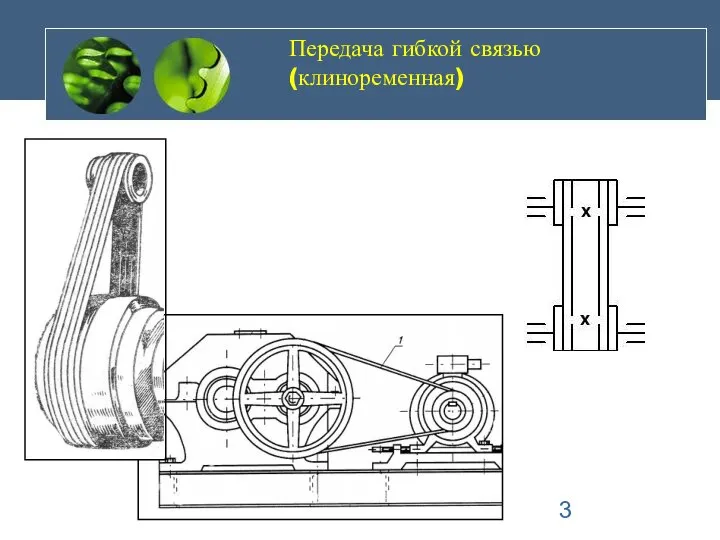
Передача гибкой связью (клиноременная)
Передача гибкой связью (клиноременная)
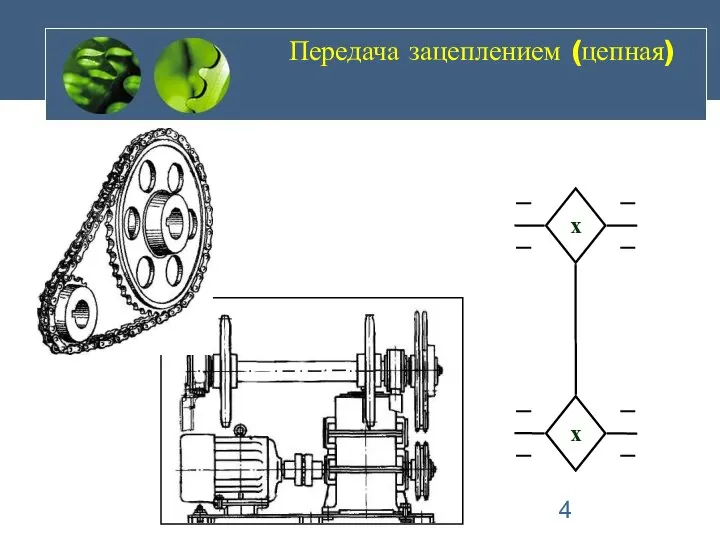
Передача зацеплением (цепная)
Передача зацеплением (цепная)

Передача зацеплением (зубчатая цилиндрическая)
Передача зацеплением (зубчатая цилиндрическая)
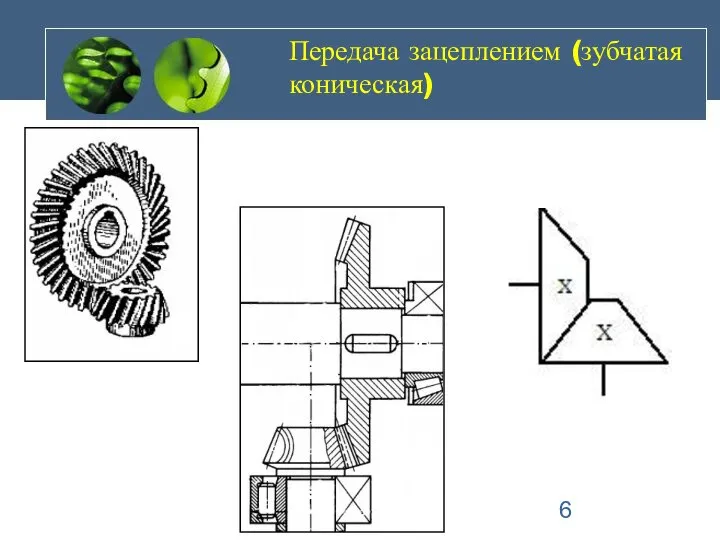
Передача зацеплением (зубчатая коническая)
Передача зацеплением (зубчатая коническая)
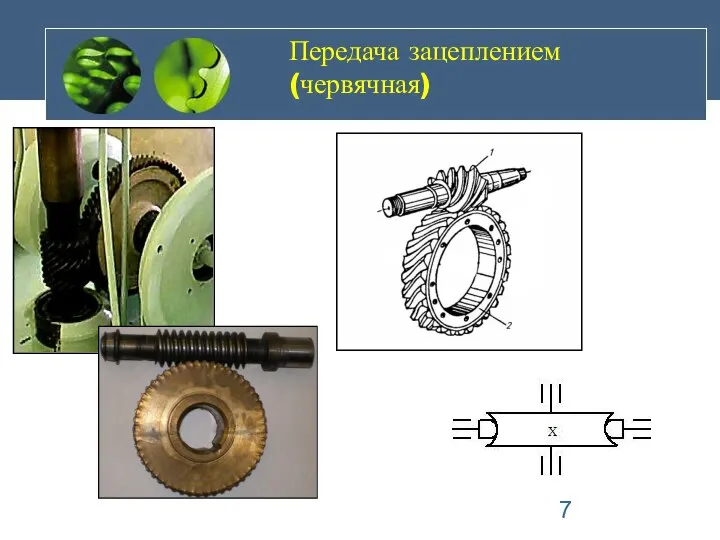
Передача зацеплением (червячная)
Передача зацеплением (червячная)
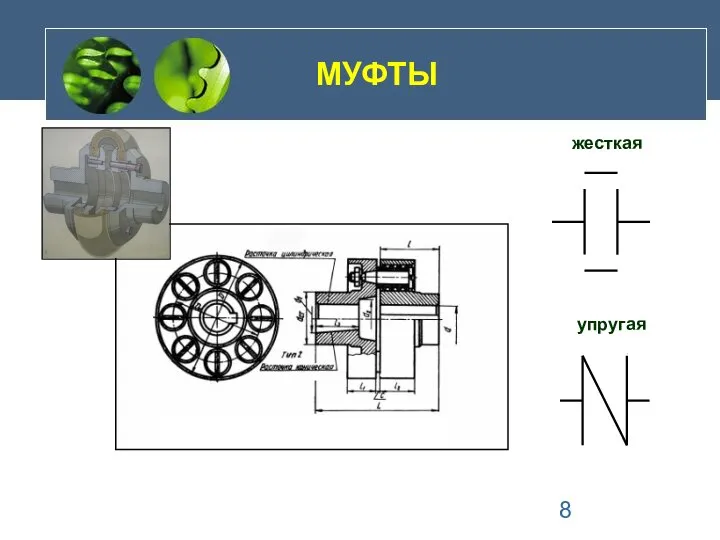
жесткая
упругая
МУФТЫ
жесткая
упругая
МУФТЫ
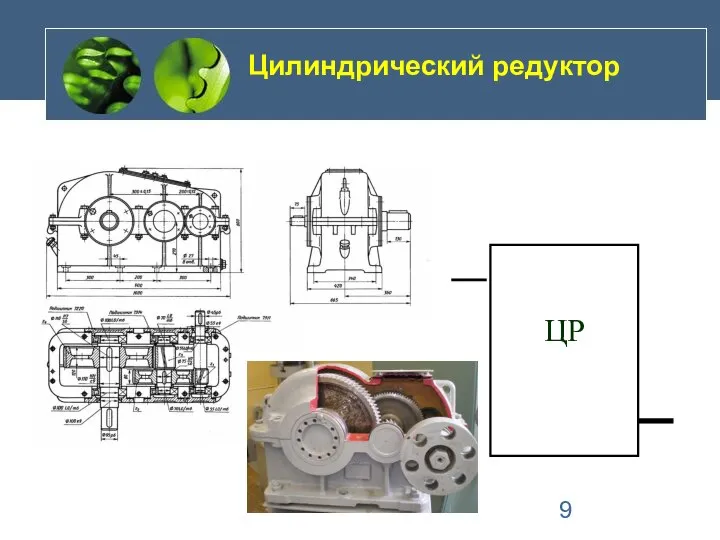
Цилиндрический редуктор
Цилиндрический редуктор

Конический редуктор
Конический редуктор
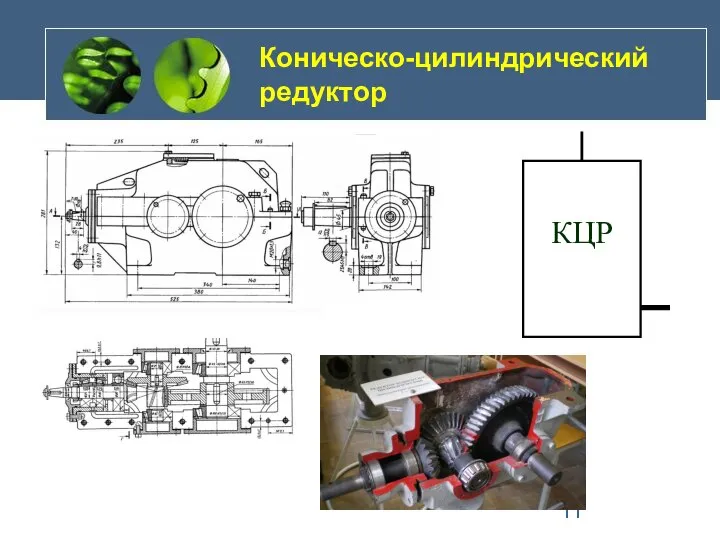
Коническо-цилиндрический
редуктор
Коническо-цилиндрический
редуктор
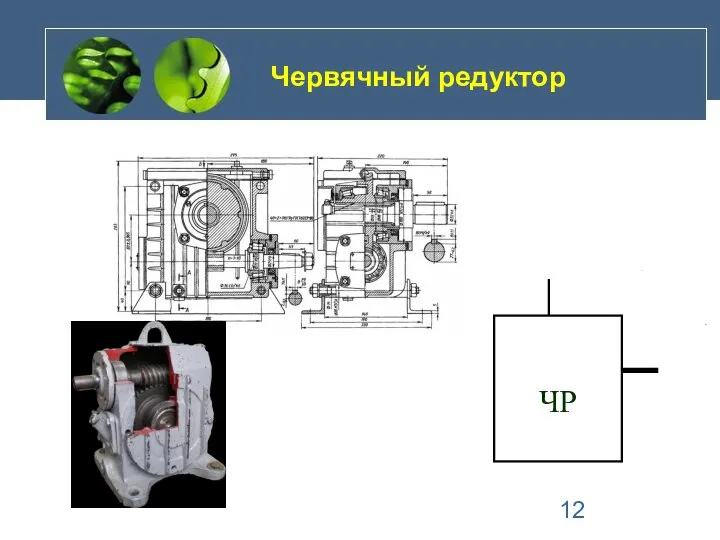
Червячный редуктор
Червячный редуктор
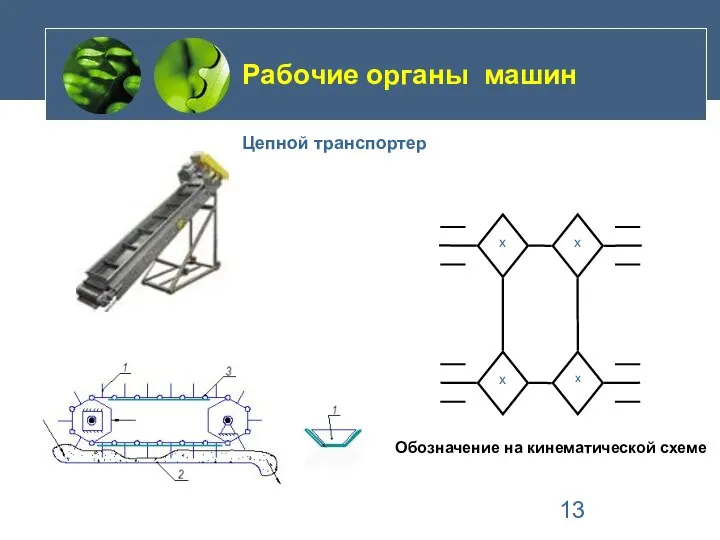
Рабочие органы машин
Цепной транспортер
Обозначение на кинематической схеме
Рабочие органы машин
Цепной транспортер
Обозначение на кинематической схеме

Ленточный транспортер
Рабочие органы машин
Обозначение на кинематической схеме
Ленточный транспортер
Рабочие органы машин
Обозначение на кинематической схеме
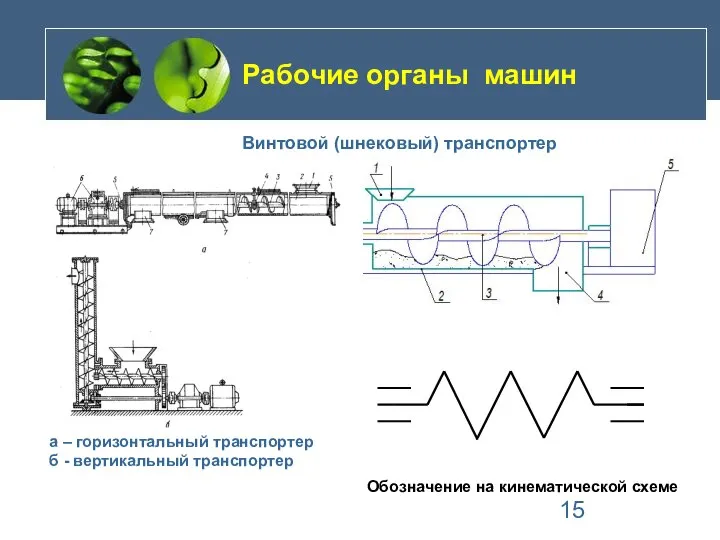
Винтовой (шнековый) транспортер
Обозначение на кинематической схеме
а – горизонтальный транспортер
б - вертикальный
Винтовой (шнековый) транспортер
Обозначение на кинематической схеме
а – горизонтальный транспортер
б - вертикальный

Рабочие органы машин
Грузоподъемное устройство (таль)
Обозначение на кинематической схеме
Рабочие органы машин
Грузоподъемное устройство (таль)
Обозначение на кинематической схеме

Составить кинематическую схему для привода, состоящего из электродвигателя,
упругой муфты и
Составить кинематическую схему для привода, состоящего из электродвигателя,
упругой муфты и
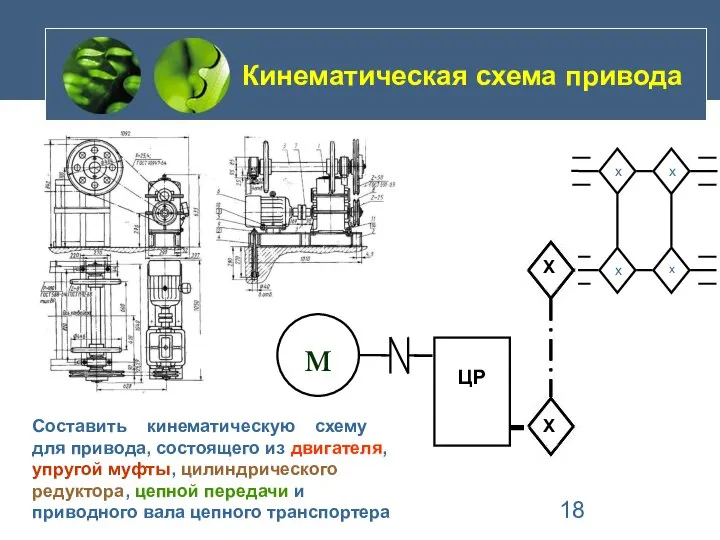
Составить кинематическую схему для привода, состоящего из двигателя, упругой муфты,
Составить кинематическую схему для привода, состоящего из двигателя, упругой муфты,

Привод, состоящий из двигателя, упругой муфты, цилиндрического
редуктора и цепной передачи
Привод, состоящий из двигателя, упругой муфты, цилиндрического
редуктора и цепной передачи
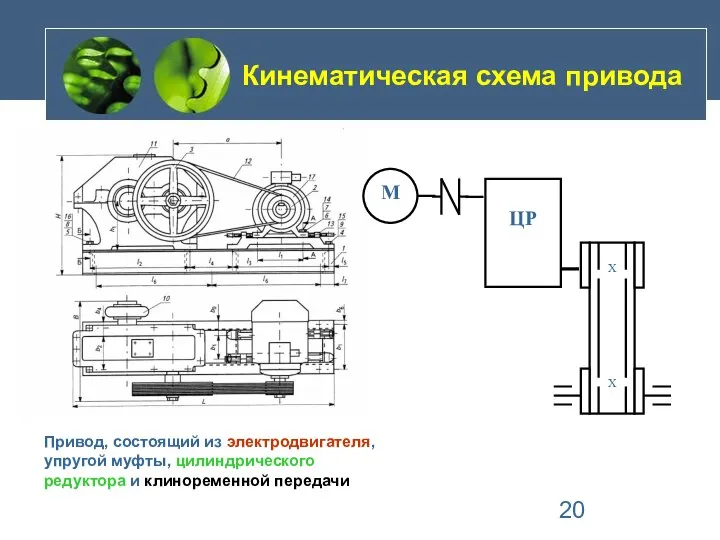
Кинематическая схема привода
Привод, состоящий из электродвигателя,
упругой муфты, цилиндрического
редуктора
Кинематическая схема привода
Привод, состоящий из электродвигателя,
упругой муфты, цилиндрического
редуктора

Задание:
Составить кинематическую схему привода ленточного транспортера, состоящего из электродвигателя, упругой муфты,
Задание:
Составить кинематическую схему привода ленточного транспортера, состоящего из электродвигателя, упругой муфты,
 bashkortostan-moi-krai-rodnoi_uiop2
bashkortostan-moi-krai-rodnoi_uiop2 Zanatie_4__Predmetnaa_s_emka_1568581850_1569531188
Zanatie_4__Predmetnaa_s_emka_1568581850_1569531188 ПЕРСПЕКТИВНАЯ НАЧАЛЬНАЯ ШКОЛА
ПЕРСПЕКТИВНАЯ НАЧАЛЬНАЯ ШКОЛА Технологии повышения производительности процессоров
Технологии повышения производительности процессоров Сирийский узел (Конфликт в Сирии и проблема терроризма на Ближнем Востоке)
Сирийский узел (Конфликт в Сирии и проблема терроризма на Ближнем Востоке) РДУ-99
РДУ-99 Игровой ПК. Сборка до 90000 рублей. Магазин OLDI.RU
Игровой ПК. Сборка до 90000 рублей. Магазин OLDI.RU Выносливость и методики ее развития
Выносливость и методики ее развития Биоэнергетика мембран
Биоэнергетика мембран  Формы записи алгоритмов
Формы записи алгоритмов Утешение философией последнего римлянина Боэция
Утешение философией последнего римлянина Боэция Изготовление тапочек с национальным орнаментом
Изготовление тапочек с национальным орнаментом Аварийные памятники истории и культурного наследия города Рыбинск
Аварийные памятники истории и культурного наследия города Рыбинск Программирование в среде ArtCAM
Программирование в среде ArtCAM Проблема формирования свободной иноязычной речи
Проблема формирования свободной иноязычной речи Храм Афины Афайи
Храм Афины Афайи Морские узлы, применяемые на шлюпках. Вязание прямого, рифового узлов
Морские узлы, применяемые на шлюпках. Вязание прямого, рифового узлов Т Е М А: «ОСНОВНЫЕ ПОЛОЖЕНИЯ О ЮРИДИЧЕСКИХ ЛИЦАХ»
Т Е М А: «ОСНОВНЫЕ ПОЛОЖЕНИЯ О ЮРИДИЧЕСКИХ ЛИЦАХ» Презентация Залог как способ обеспечения исполнения обязательств
Презентация Залог как способ обеспечения исполнения обязательств Теоретический семинар в МОУ СОШ № 9 «Развитие школьного самоуправления, как средство воспитания граждан, способных внести вклад
Теоретический семинар в МОУ СОШ № 9 «Развитие школьного самоуправления, как средство воспитания граждан, способных внести вклад  Introduction to MS EXCEL
Introduction to MS EXCEL международный валютный фонд и особенности его функционирования Выполнили:Макарова А.С. и Лазарюк А.С.
международный валютный фонд и особенности его функционирования Выполнили:Макарова А.С. и Лазарюк А.С. Жизненно важное умение. Плавание
Жизненно важное умение. Плавание ВЕЛИКИЕ ПОРТРЕТИСТЫ Автор: Грибова Светлана Викторовна Учитель ИЗО и искусства МБОУ СОШ 5 города Белореченска Краснодарского к
ВЕЛИКИЕ ПОРТРЕТИСТЫ Автор: Грибова Светлана Викторовна Учитель ИЗО и искусства МБОУ СОШ 5 города Белореченска Краснодарского к Презентация
Презентация Понятие психологии Гусайниев Гасан Т-114
Понятие психологии Гусайниев Гасан Т-114  Демократия
Демократия  Презентация на тему "Права и обязанности ученика" - скачать презентации по Педагогике
Презентация на тему "Права и обязанности ученика" - скачать презентации по Педагогике