- Кинематическое исследование механизмов и машин

Содержание
- 2. Функция положения механизма это зависимость углового или линейного перемещения точки звена или звена механизма от времени
- 3. Кинематические передаточные функции механизма – производные от функции положения по обобщенной коор-динате. Первая производная называется первой
- 4. Геометрические и кинематические характеристики механизма
- 5. Механизм с одной подвижностью имеет одно заданное входное движение и некоторое множество выходных (движение любого звена
- 6. Схема механической системы Схема включает входное звено (1), зубчатую передачу (звенья 1-2) , кулачковый (звенья 2-3-4)
- 7. Блок-схема рассмотренной механической системы
- 8. Функции положения в механизмах
- 9. Линейные скорости и ускорения Угловые скорости и ускорения Связь кинематических и передаточных функций
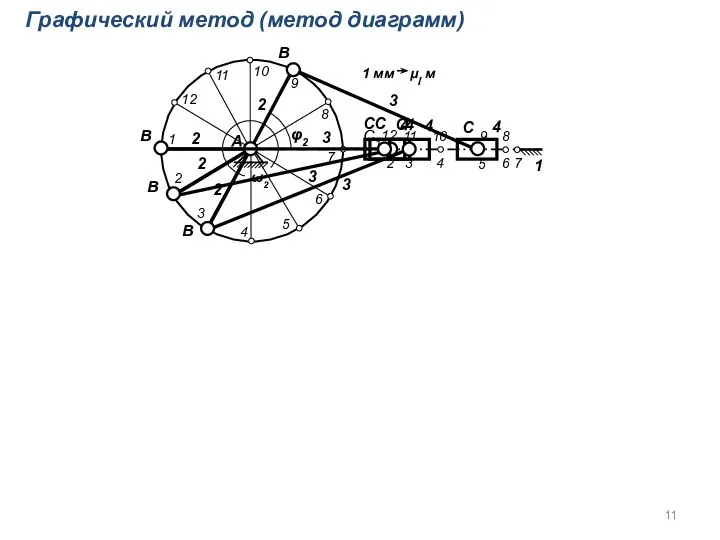
- 10. - кинематических диаграмм (графический), - планов положений, скоростей и ускорений (графо-аналитический), - проекций векторного контура (аналитический),
- 11. 2 3 4 6 7 C 4 Графический метод (метод диаграмм) 1 2 3 5 6
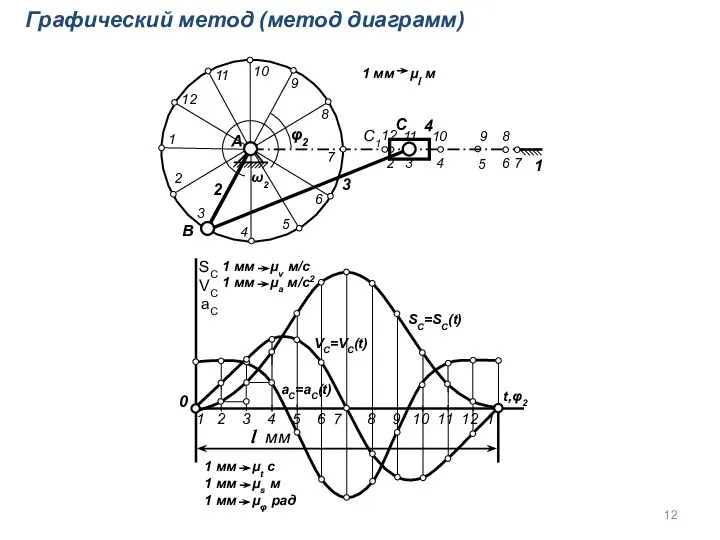
- 12. 2 3 4 6 7 4 Графический метод (метод диаграмм) SC VC aC l мм 1
- 13. s2b as2 s2 A B O1 O3 1 2 3 VBA VBA VB VA VB =
- 14. Графо-аналитический метод (метод планов ускорений) Метод планов ускорений основан на теореме о распределении ускорений точек тела
- 15. e s1 f c C d B b p 1 4 E 2 5 F G
- 16. S1 s1 n2 e n6 n3 F d b C B 1 4 E 2 5
- 17. Рассмотрим простейший кулисный механизм. Заменим кинематическую схему механизма эквивалент-ным векторным контуром. Тогда уравнение замкнутости векторного контура
- 18. Задача о положениях звеньев механизма Проецируем векторный контур на оси координат и полу- чаем координаты точки
- 19. Из решения этой системы уравнений определяем неиз-вестные величины и , которые определяют положение звеньев и точек
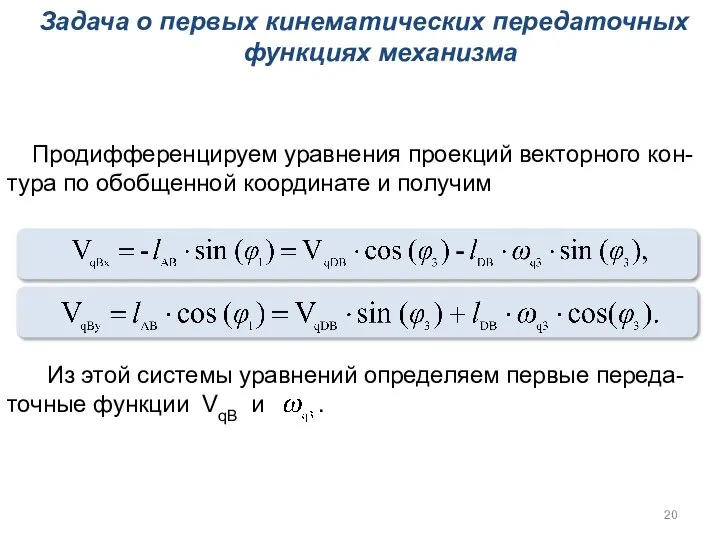
- 20. Задача о первых кинематических передаточных функциях механизма Продифференцируем уравнения проекций векторного кон-тура по обобщенной координате и
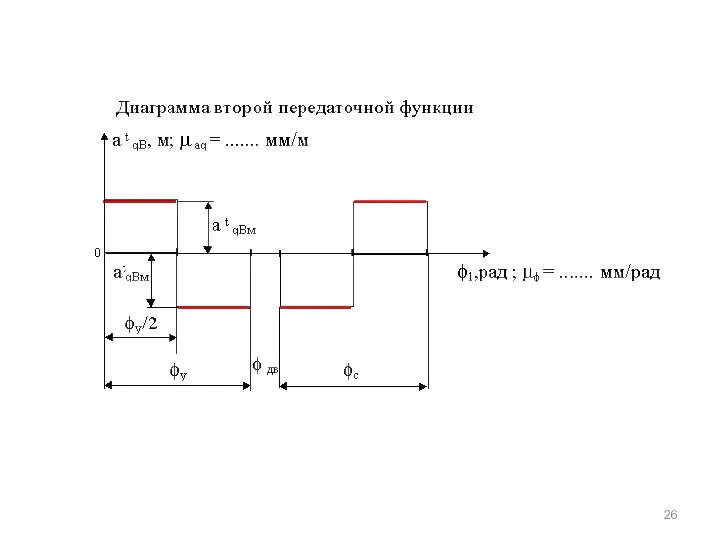
- 21. Задача о вторых передаточных функциях механизма Вторично продифференцируем уравнения проекций вектор-ного контура по обобщенной координате и
- 22. Выполнив вычисления по приве-дённым выше зависимостям, пост-роим соответствующие диаграм-мы.
- 23. Диаграммы функции положения и передаточных функций для зубчатой передачи
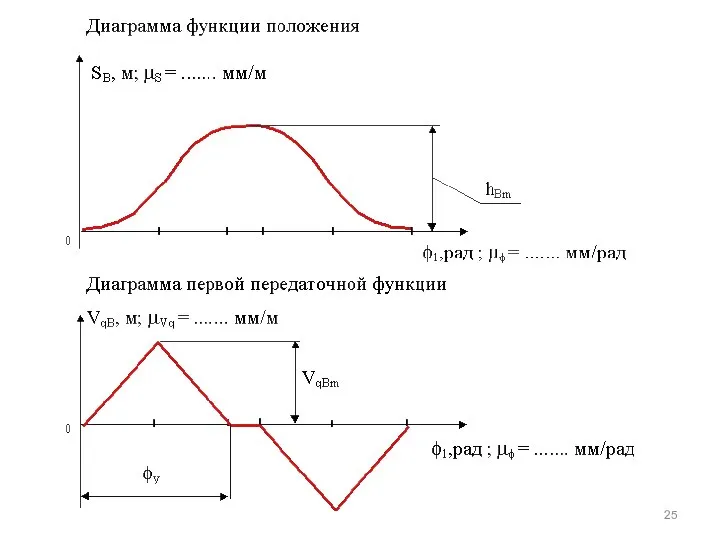
- 24. Диаграммы функции положения и передаточных функций для кулачкового механизма Кинематическая схема и цикловые характеристики кулачкового механизма
- 27. Экспериментальный метод кинематического исследования При экспериментальном исследовании кинематики меха-низмов кинематические характеристики звеньев и точек ме-ханизма определяются
- 28. В последнее время для регистрации и обработки экспери-ментальных данных все более широко используются специ-альные или универсальные
- 29. В этой экспериментальной установке: для измерения перемещения выходного звена исполь-зуется потенциометрический датчик перемещения, в котором пропорционально
- 30. для измерения ускорения выходного звена использу-ется тензометрический акселерометр. Он состоит из плас-тинчатой пружины один конец которой
- 31. Передаточные функции механизмов с несколькими подвижностями (W>1) Рассмотрим простой двухподвижный манипулятор:
- 33. Скачать презентацию
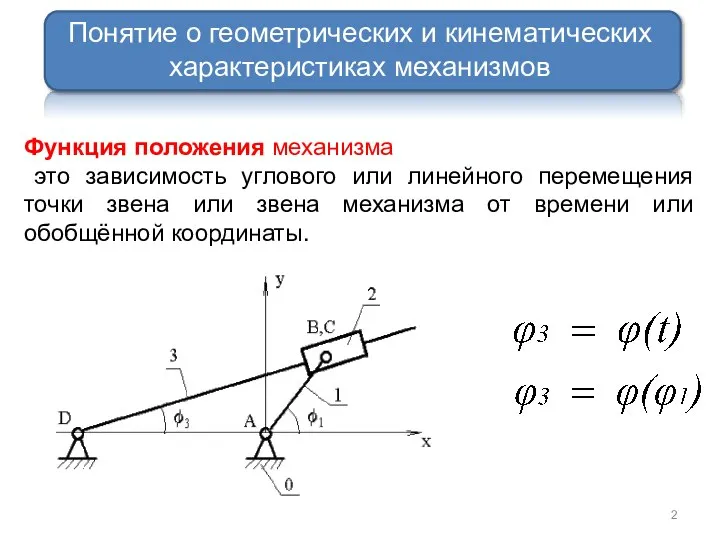
Функция положения механизма
это зависимость углового или линейного перемещения точки звена
Функция положения механизма
это зависимость углового или линейного перемещения точки звена
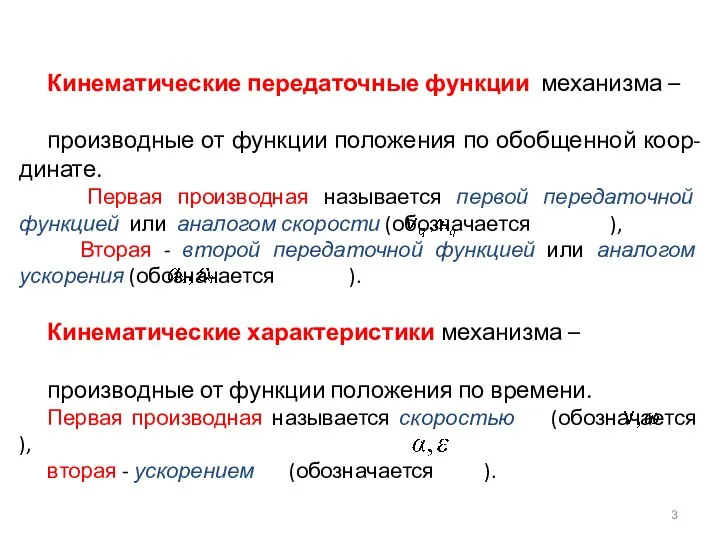
Кинематические передаточные функции механизма –
производные от функции положения по обобщенной коор-динате.
производные от функции положения по обобщенной коор-динате.
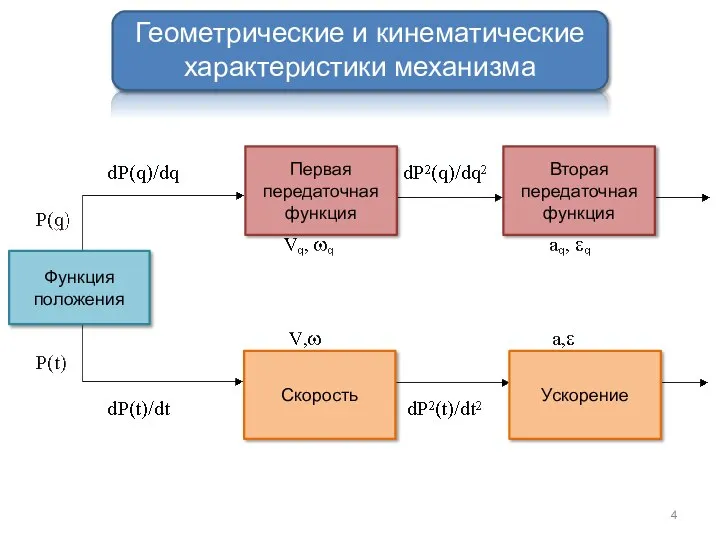
Геометрические и кинематические
характеристики механизма
Геометрические и кинематические
характеристики механизма
Механизм с одной подвижностью имеет одно заданное входное движение и некоторое
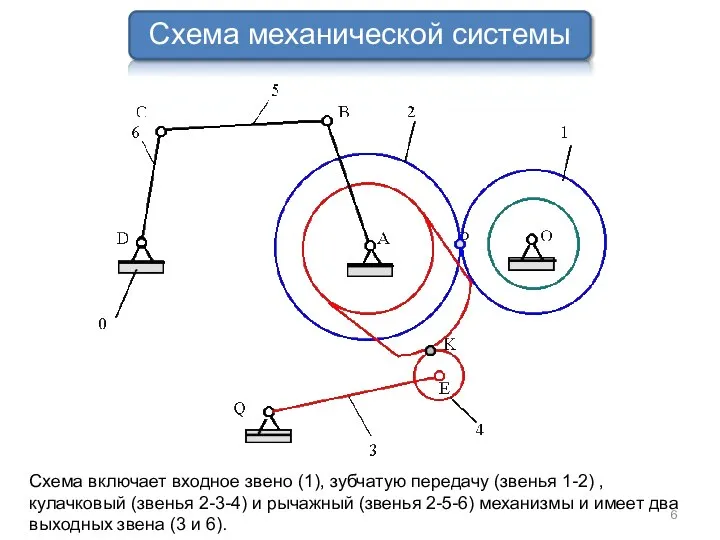
Схема механической системы
Схема включает входное звено (1), зубчатую передачу (звенья 1-2)
Схема механической системы
Схема включает входное звено (1), зубчатую передачу (звенья 1-2)

Блок-схема рассмотренной механической системы
Блок-схема рассмотренной механической системы
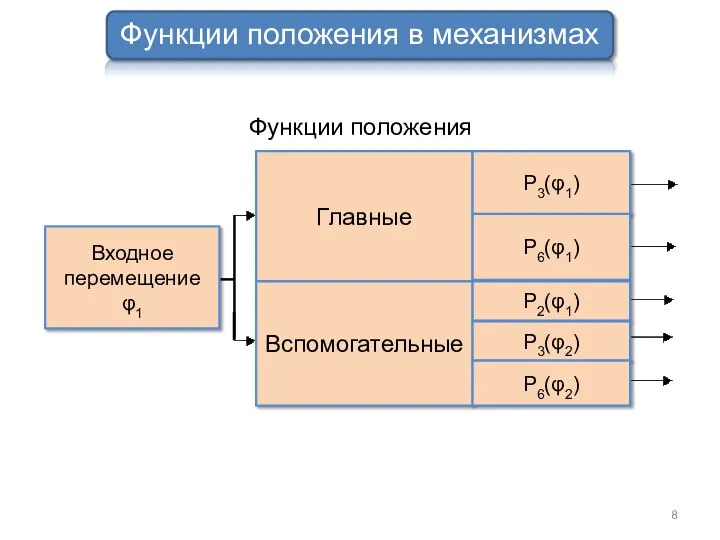
Функции положения в механизмах
Функции положения в механизмах
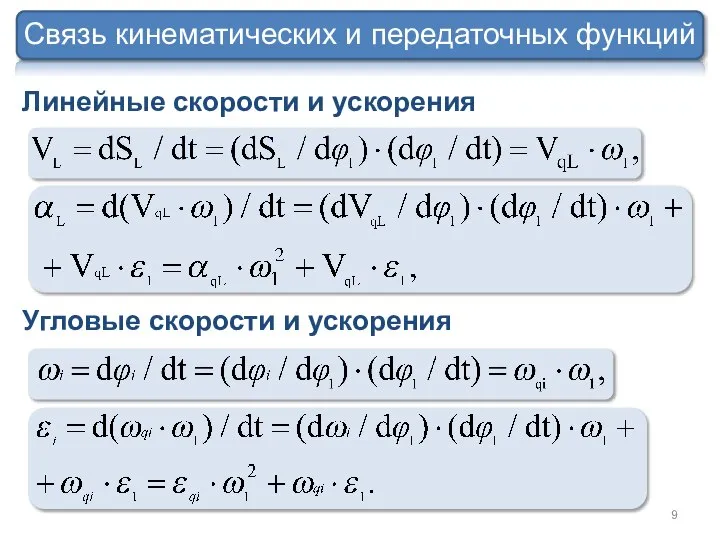
Линейные скорости и ускорения
Угловые скорости и ускорения
Связь кинематических и передаточных
Линейные скорости и ускорения
Угловые скорости и ускорения
Связь кинематических и передаточных
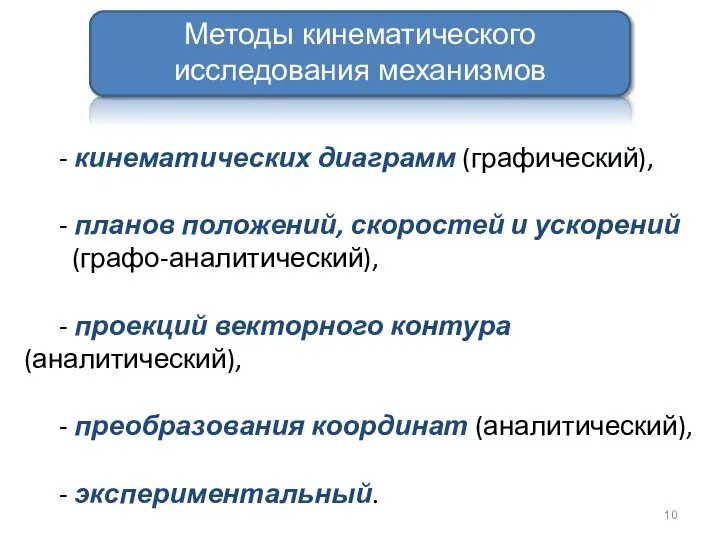
- кинематических диаграмм (графический),
- планов положений, скоростей и ускорений
- кинематических диаграмм (графический),
- планов положений, скоростей и ускорений
2 3 4 6 7
C
4
Графический метод (метод диаграмм)
1
2
3
5
6
7
8
9
10
11
12
A
ω2
φ2
5
8
12
10
C1
9
4
3
2
B
1 мм μl
2 3 4 6 7
C
4
Графический метод (метод диаграмм)
1
2
3
5
6
7
8
9
10
11
12
A
ω2
φ2
5
8
12
10
C1
9
4
3
2
B
1 мм μl
2 3 4 6 7
4
Графический метод (метод диаграмм)
SC
VC
aC
l мм
1 2
2 3 4 6 7
4
Графический метод (метод диаграмм)
SC
VC
aC
l мм
1 2
s2b
as2
s2
A
B
O1
O3
1
2
3
VBA
VBA
VB
VA
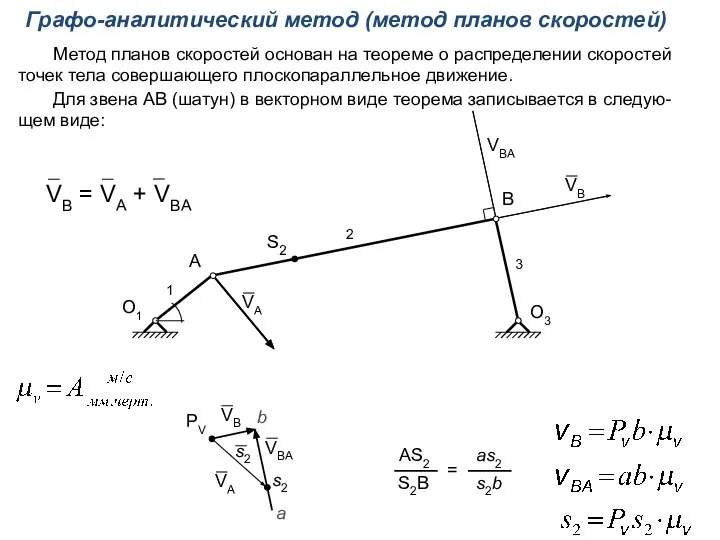
VB = VA + VBA
VA
VB
S2
a
b
AS2
S2B
=
PV
s2
Графо-аналитический метод (метод планов скоростей)
Метод планов
s2b
as2
s2
A
B
O1
O3
1
2
3
VBA
VBA
VB
VA
VB = VA + VBA
VA
VB
S2
a
b
AS2
S2B
=
PV
s2
Графо-аналитический метод (метод планов скоростей)
Метод планов

Графо-аналитический метод (метод планов ускорений)
Метод планов ускорений основан на теореме
Графо-аналитический метод (метод планов ускорений)
Метод планов ускорений основан на теореме
e
s1
f
c
C
d
B
b
p
1
4
E
2
5
F
G
D
3
6
S1
S2
S3
g
7
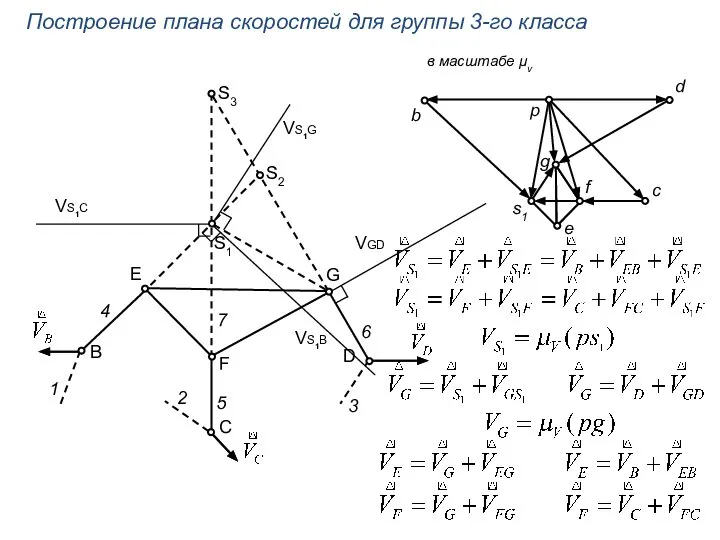
в масштабе μv
VS1B
VS1C
VS1G
VGD
Построение плана скоростей для группы 3-го класса
e
s1
f
c
C
d
B
b
p
1
4
E
2
5
F
G
D
3
6
S1
S2
S3
g
7
в масштабе μv
VS1B
VS1C
VS1G
VGD
Построение плана скоростей для группы 3-го класса
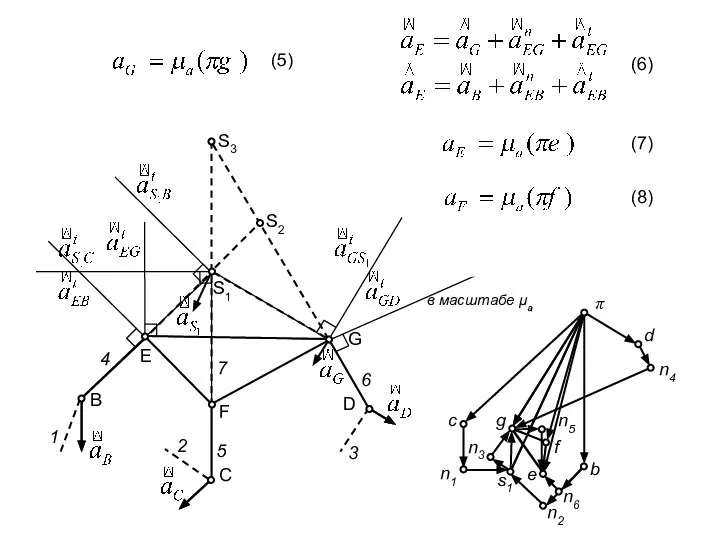
S1
s1
n2
e
n6
n3
F
d
b
C
B
1
4
E
2
5
G
D
3
6
S2
S3
7
в масштабе μa
c
n1
g
f
n5
n4
π
(1)
(3)
(2.1)
(2.2)
(2.3)
(2.4)
(4)
(6)
(5)
(8)
(7)
S1
s1
n2
e
n6
n3
F
d
b
C
B
1
4
E
2
5
G
D
3
6
S2
S3
7
в масштабе μa
c
n1
g
f
n5
n4
π
(1)
(3)
(2.1)
(2.2)
(2.3)
(2.4)
(4)
(6)
(5)
(8)
(7)
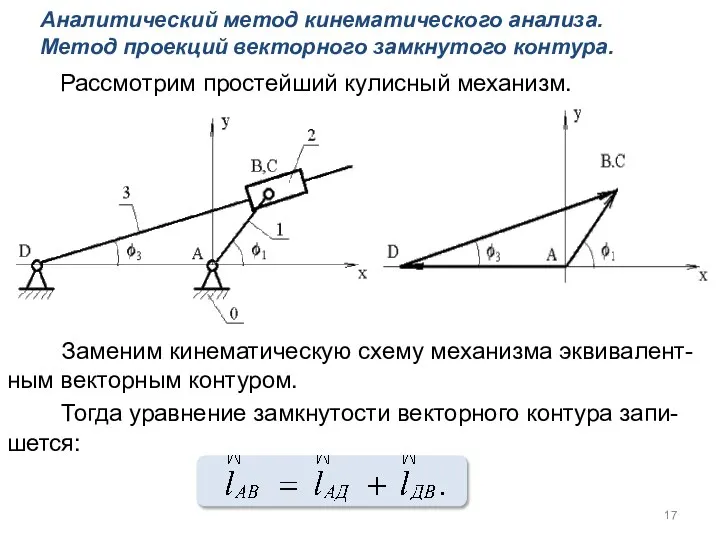
Рассмотрим простейший кулисный механизм.
Заменим кинематическую схему механизма эквивалент-ным векторным контуром.
Заменим кинематическую схему механизма эквивалент-ным векторным контуром.

Задача о положениях звеньев механизма
Проецируем векторный контур на оси координат и
Задача о положениях звеньев механизма
Проецируем векторный контур на оси координат и
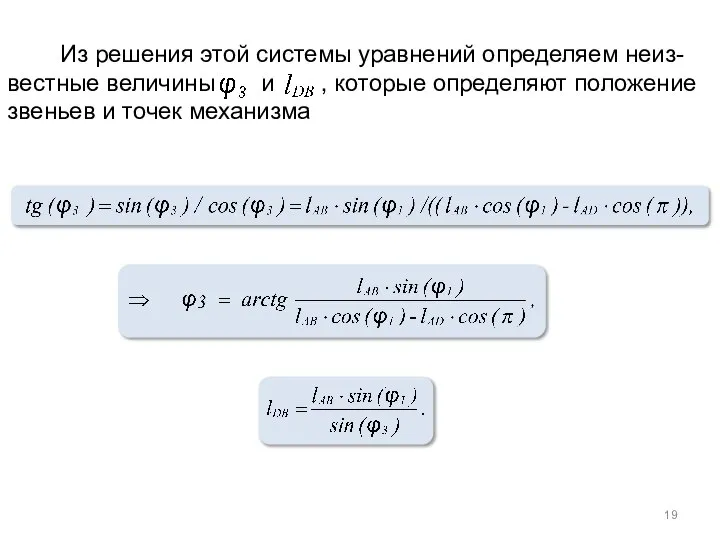
Из решения этой системы уравнений определяем неиз-вестные величины и , которые
Задача о первых кинематических передаточных функциях механизма
Продифференцируем уравнения проекций векторного
Задача о первых кинематических передаточных функциях механизма
Продифференцируем уравнения проекций векторного
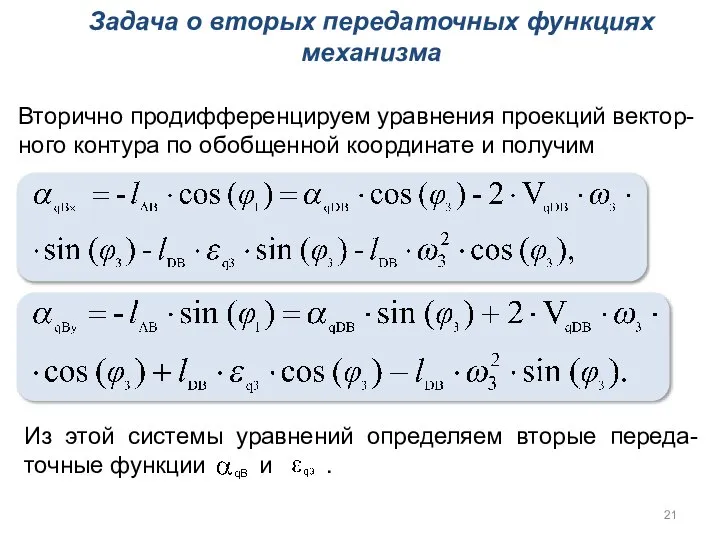
Задача о вторых передаточных функциях механизма
Вторично продифференцируем уравнения проекций вектор-ного контура
Задача о вторых передаточных функциях механизма
Вторично продифференцируем уравнения проекций вектор-ного контура

Выполнив вычисления по приве-дённым выше зависимостям, пост-роим соответствующие диаграм-мы.
Выполнив вычисления по приве-дённым выше зависимостям, пост-роим соответствующие диаграм-мы.
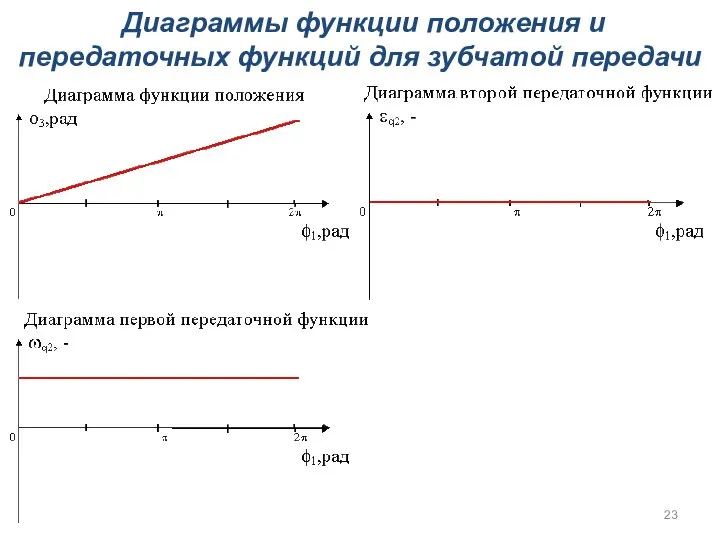
Диаграммы функции положения и передаточных функций для зубчатой передачи
Диаграммы функции положения и передаточных функций для зубчатой передачи
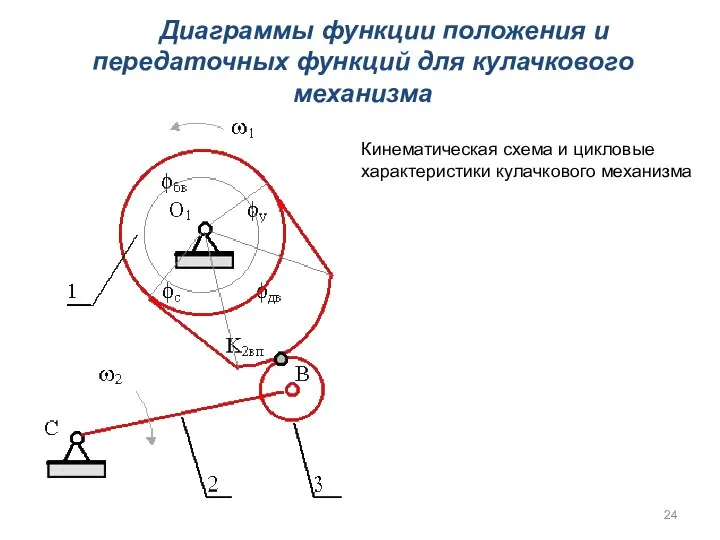
Диаграммы функции положения и передаточных функций для кулачкового механизма
Кинематическая схема
Диаграммы функции положения и передаточных функций для кулачкового механизма
Кинематическая схема

Экспериментальный метод кинематического исследования
При экспериментальном исследовании кинематики меха-низмов кинематические характеристики
Экспериментальный метод кинематического исследования
При экспериментальном исследовании кинематики меха-низмов кинематические характеристики

В последнее время для регистрации и обработки экспери-ментальных данных все
В последнее время для регистрации и обработки экспери-ментальных данных все
В этой экспериментальной установке:
для измерения перемещения выходного звена исполь-зуется потенциометрический датчик
для измерения перемещения выходного звена исполь-зуется потенциометрический датчик
для измерения ускорения выходного звена использу-ется тензометрический акселерометр. Он состоит из
для измерения ускорения выходного звена использу-ется тензометрический акселерометр. Он состоит из
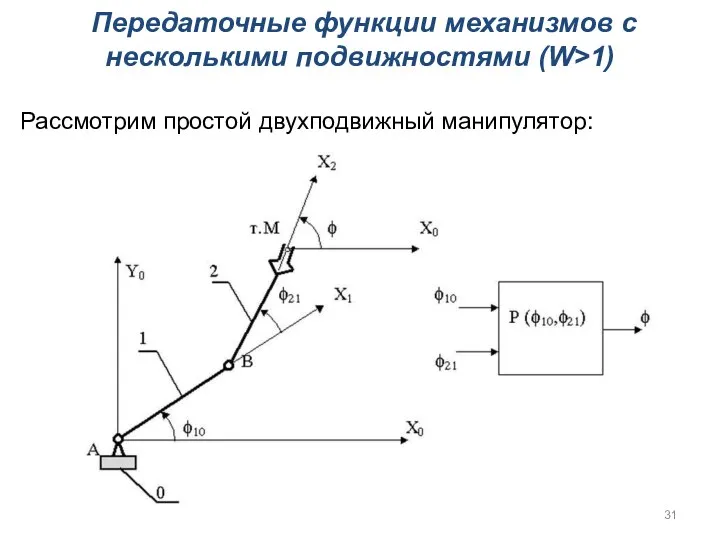
Передаточные функции механизмов с несколькими подвижностями (W>1)
Рассмотрим простой двухподвижный
Передаточные функции механизмов с несколькими подвижностями (W>1)
Рассмотрим простой двухподвижный
 Қазақстан Републикасының тәуелсіздігіне 25 жыл
Қазақстан Републикасының тәуелсіздігіне 25 жыл Проект по созданию предметно-развивающей среды на территории ГДО «Наш спортивный дворик»
Проект по созданию предметно-развивающей среды на территории ГДО «Наш спортивный дворик» Ростов Великий
Ростов Великий Физическая культура в общекультурной и профессиональной подготовке студентов
Физическая культура в общекультурной и профессиональной подготовке студентов Защита персональных данных
Защита персональных данных  Мотиваційні аспекти впровадження інноваційних технологій
Мотиваційні аспекти впровадження інноваційних технологій Сапаны қамтамасыз етудің негізгі түсініктері мен әдістемелік жүйесі. Сапаны қамтамасыз ету QA
Сапаны қамтамасыз етудің негізгі түсініктері мен әдістемелік жүйесі. Сапаны қамтамасыз ету QA Писаревская Татьяна Петровна БСОШ1 Режим дня школьника. - презентация
Писаревская Татьяна Петровна БСОШ1 Режим дня школьника. - презентация Я ВЫБИРАЮ ЖИЗНЬ!
Я ВЫБИРАЮ ЖИЗНЬ! Організація самостійних занять студентів. Спортивно-масова робота в студентських гуртожитках
Організація самостійних занять студентів. Спортивно-масова робота в студентських гуртожитках Презентация "Научные школы управления персоналом" - скачать презентации по Экономике
Презентация "Научные школы управления персоналом" - скачать презентации по Экономике Биоадаптивное освещение HCL. Светодизайн
Биоадаптивное освещение HCL. Светодизайн Презентация Концепции западников и славянофилов: сходства и различия
Презентация Концепции западников и славянофилов: сходства и различия  Письменная культура славян
Письменная культура славян Политический радикализм
Политический радикализм Страны-участники Организации договора о коллективной безопасности (ОДКБ). Цели и задачи
Страны-участники Организации договора о коллективной безопасности (ОДКБ). Цели и задачи Спряжение глаголов в Präsens ( настоящем времени)
Спряжение глаголов в Präsens ( настоящем времени) Москва, как город федерального значения и столица РФ
Москва, как город федерального значения и столица РФ Игра лазертаг
Игра лазертаг Принятые основные символы и обозначения
Принятые основные символы и обозначения Литературные произведения с упоминаниями зерна и хлебобулочных изделий
Литературные произведения с упоминаниями зерна и хлебобулочных изделий Закріплення звука ДЖ, буквосполучення ДЖ
Закріплення звука ДЖ, буквосполучення ДЖ Иридодиагностика-8
Иридодиагностика-8 Особенности расчета прямозубых конических передач
Особенности расчета прямозубых конических передач Сертификация авиационной техники. Понятия и принципы технического регулирования
Сертификация авиационной техники. Понятия и принципы технического регулирования Селекция мод. Режимы работы лазера
Селекция мод. Режимы работы лазера Организация помощи при автодорожной травме
Организация помощи при автодорожной травме Физкультурное занятие в дошкольном образовательном учреждении
Физкультурное занятие в дошкольном образовательном учреждении