- Методы низкоуровневого микропрограммирования

Содержание
- 2. Вертикальное микропрограммирование. - Функциональному сигналу ставится в соответствие не разряд, а двоичный код операционной части микрокоманды
- 3. Вертикально-горизонтальное микропрограммирование. Сочетает достоинства горизонтального и вертикального методов. Множество микроопераций разбивается на несколько подмножеств. Микрооперации внутри
- 4. Горизонтально-вертикальное микропрограммирование. Здесь также, как и в вертикально-горизонтальном методе все функциональные сигналы разбиваются на несколько подмножеств,
- 5. 6. Проектирование и программирование микропрограммного автомата (МПА). Принцип микропрограммного управления. Для выполнения операций над информацией используются
- 6. Концепция операционного и управляющего автоматов. В функциональном отношении любое операционное устройство, входящее в состав ЭВМ, удобно
- 7. Пример проектирования операционного автомата. В качестве исходных данных для разработки структуры операционного автомата являются: Описание формата
- 8. Разработка структуры операционного автомата Внешний регистр Регистр 1 Регистр 2 Регистр 2 Системная шина памяти сумматор
- 9. Оповещающие сигналы: 1. Ready – сигнал готовности контроллера памяти к операции чтение-запись. 2. Error – сигнал,
- 10. Разработка алгоритма выполнения операции сложения двух чисел. начало R=Ready R=1 нет WR=1 WR=0, WR1=1 R=Ready R=0
- 11. 7. Разработка структуры управляющего микропрограммного автомата. Принципиальная схема управляющего микропрограммного автомата. Схема микропрограммного автомата синхронизируется с
- 12. Порядок построения простой горизонтальной микропрограммы для микропрограммного автомата схемы генерации сигналов. В ответ на положительный уровень
- 13. A PROM D RG C Г 1 2 3 4 5 Z 5 4 3 21
- 15. Скачать презентацию
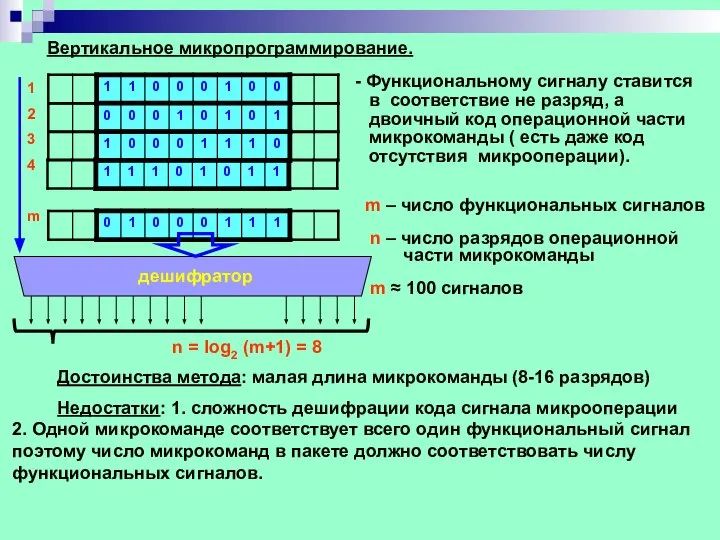
Вертикальное микропрограммирование.
- Функциональному сигналу ставится
в соответствие не
Вертикальное микропрограммирование.
- Функциональному сигналу ставится
в соответствие не
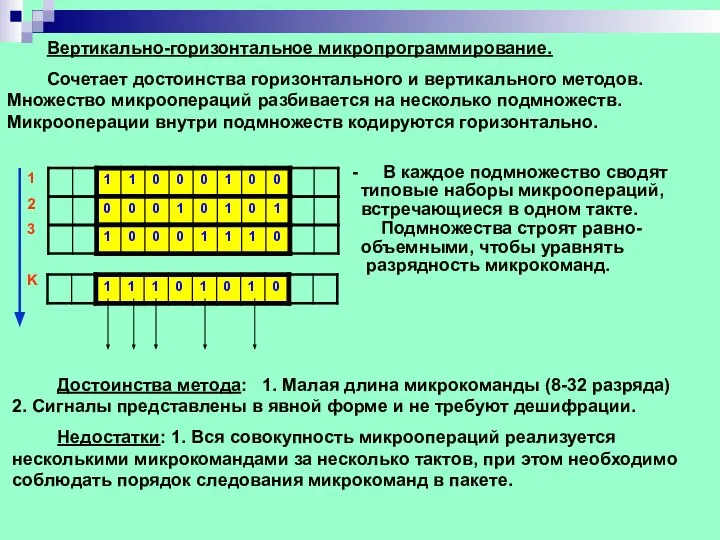
Вертикально-горизонтальное микропрограммирование.
Сочетает достоинства горизонтального и вертикального методов. Множество
Вертикально-горизонтальное микропрограммирование.
Сочетает достоинства горизонтального и вертикального методов. Множество
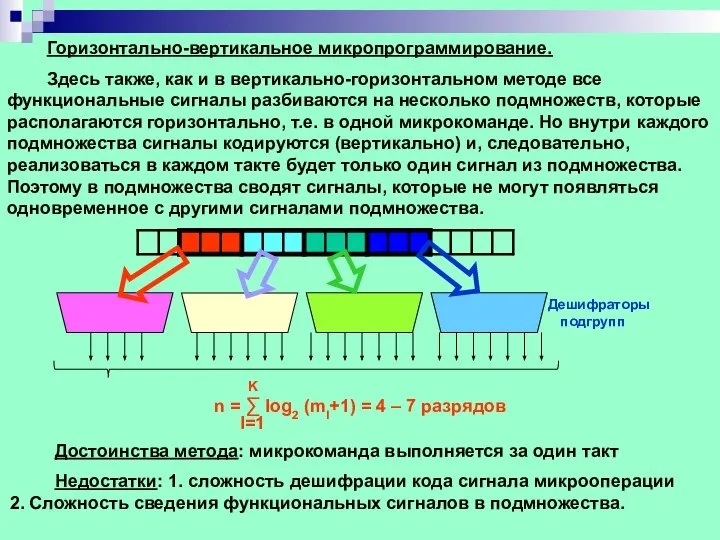
Горизонтально-вертикальное микропрограммирование.
Здесь также, как и в вертикально-горизонтальном методе
Горизонтально-вертикальное микропрограммирование.
Здесь также, как и в вертикально-горизонтальном методе
6. Проектирование и программирование микропрограммного
автомата (МПА).
Принцип микропрограммного управления.
Для выполнения операций
6. Проектирование и программирование микропрограммного
автомата (МПА).
Принцип микропрограммного управления.
Для выполнения операций
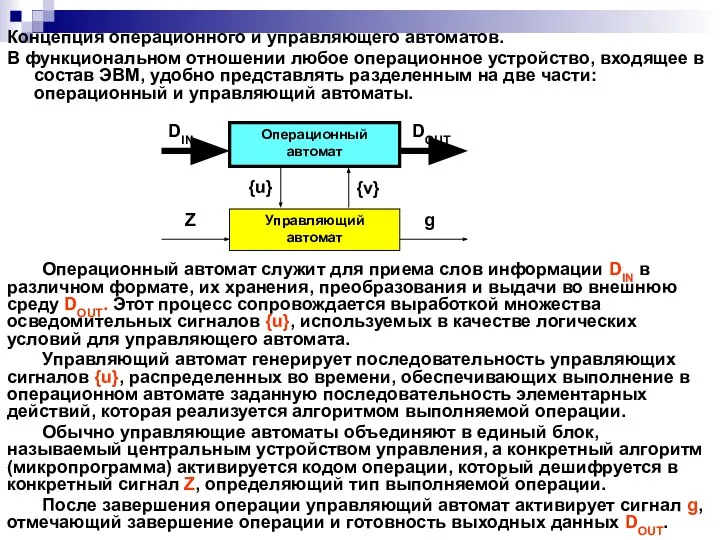
Концепция операционного и управляющего автоматов.
В функциональном отношении любое операционное устройство,
Концепция операционного и управляющего автоматов.
В функциональном отношении любое операционное устройство,
Пример проектирования операционного автомата.
В качестве исходных данных для разработки структуры
Пример проектирования операционного автомата.
В качестве исходных данных для разработки структуры
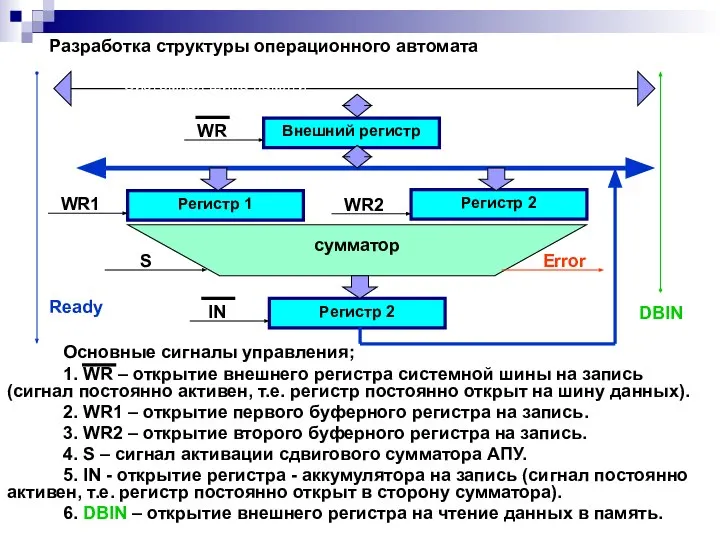
Разработка структуры операционного автомата
Внешний регистр
Регистр 1
Регистр 2
Регистр 2
Системная шина памяти
сумматор
WR1
WR
WR2
IN
Error
S
Ready
DBIN
Основные сигналы
Разработка структуры операционного автомата
Внешний регистр
Регистр 1
Регистр 2
Регистр 2
Системная шина памяти
сумматор
WR1
WR
WR2
IN
Error
S
Ready
DBIN
Основные сигналы
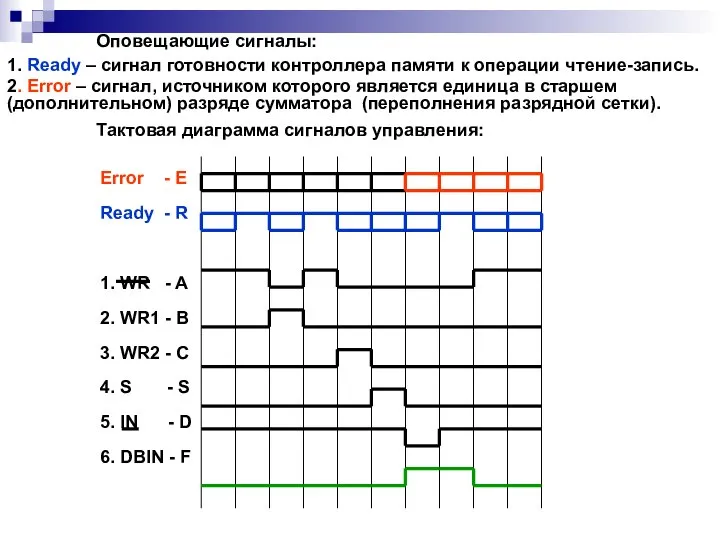
Оповещающие сигналы:
1. Ready – сигнал готовности контроллера памяти к операции
Оповещающие сигналы:
1. Ready – сигнал готовности контроллера памяти к операции
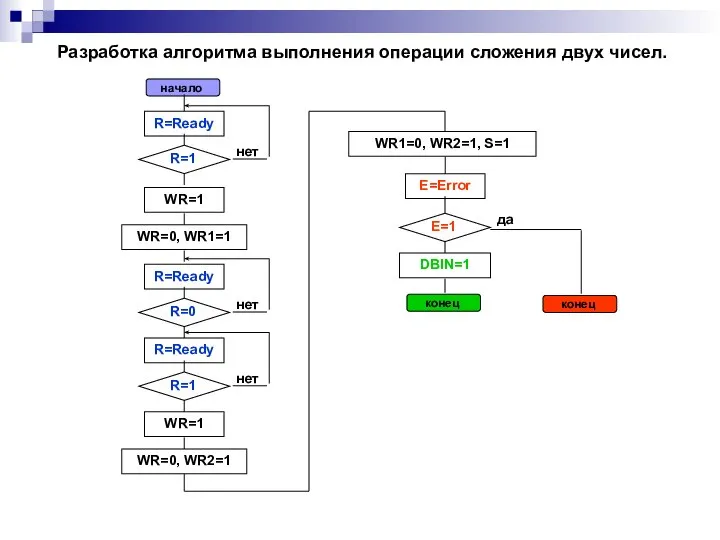
Разработка алгоритма выполнения операции сложения двух чисел.
начало
R=Ready
R=1
нет
WR=1
WR=0, WR1=1
R=Ready
R=0
нет
R=Ready
R=1
нет
WR=1
WR=0, WR2=1
WR1=0, WR2=1,
Разработка алгоритма выполнения операции сложения двух чисел.
начало
R=Ready
R=1
нет
WR=1
WR=0, WR1=1
R=Ready
R=0
нет
R=Ready
R=1
нет
WR=1
WR=0, WR2=1
WR1=0, WR2=1,
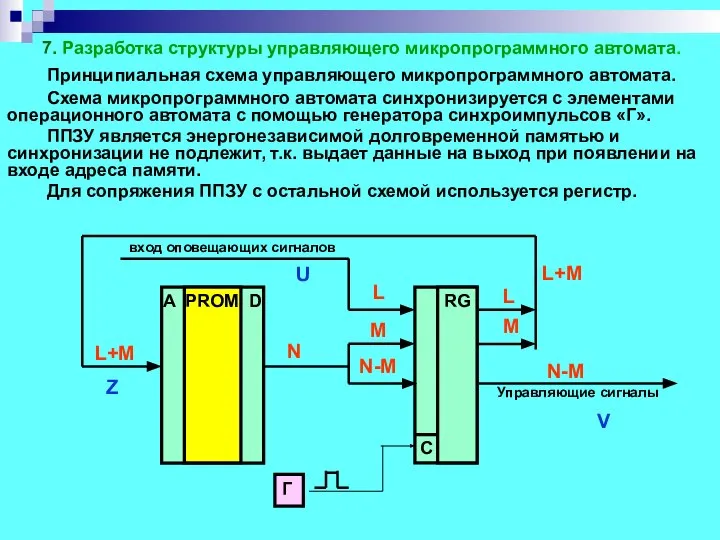
7. Разработка структуры управляющего микропрограммного автомата.
Принципиальная схема управляющего микропрограммного
7. Разработка структуры управляющего микропрограммного автомата.
Принципиальная схема управляющего микропрограммного
Порядок построения простой горизонтальной микропрограммы для микропрограммного автомата схемы генерации
Порядок построения простой горизонтальной микропрограммы для микропрограммного автомата схемы генерации
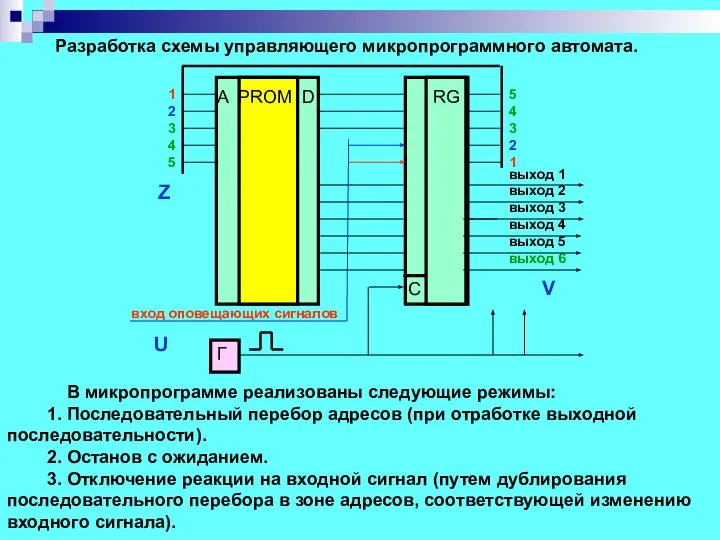
A PROM D
RG
C
Г
1 2 3 4 5
Z
5 4
A PROM D
RG
C
Г
1 2 3 4 5
Z
5 4
 Культура и быт России в XVII веке
Культура и быт России в XVII веке Достопримечательности мира
Достопримечательности мира Технология строительства крыши
Технология строительства крыши Создание презентаций
Создание презентаций Городецкая роспись
Городецкая роспись Разрезы. Правила построения и обозначения на чертеже
Разрезы. Правила построения и обозначения на чертеже Валы и оси
Валы и оси Електричний струм у металах, рідинах і газах. (Лекція 11)
Електричний струм у металах, рідинах і газах. (Лекція 11) Термодинамические основы циклов ДВС
Термодинамические основы циклов ДВС Ефірний інтерфейс
Ефірний інтерфейс Предмет і методи політології. Політика як соціальне явище
Предмет і методи політології. Політика як соціальне явище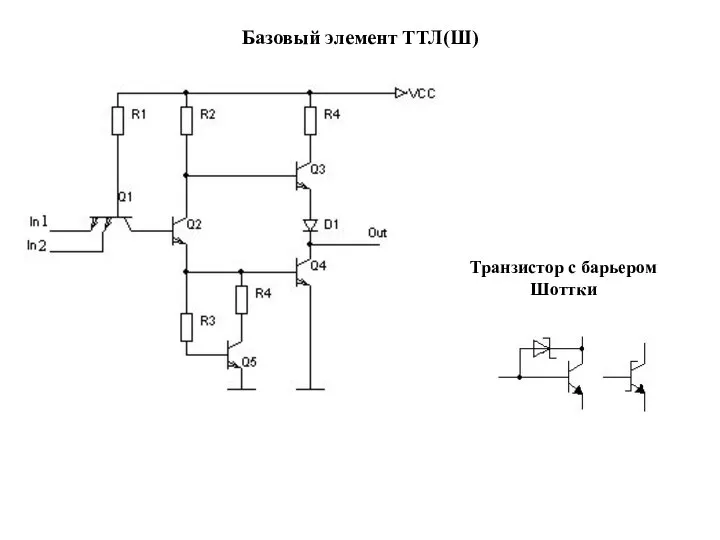 Базовый элемент ТТЛ(Ш)
Базовый элемент ТТЛ(Ш) Презентация на тему "Игра – как средство активизация познавательного интереса учащихся начальных классов" - скачать презент
Презентация на тему "Игра – как средство активизация познавательного интереса учащихся начальных классов" - скачать презент Політичні системи суспільства
Політичні системи суспільства Функциональная анатомия сердца и пороки его развития
Функциональная анатомия сердца и пороки его развития Documentation numerique Сablage Х76 electrique Рh2
Documentation numerique Сablage Х76 electrique Рh2 Урок обществознания 11 класс Терехова И.Н., учитель истории и обществознания МБОУ СОШ № 155 г.о. Самара
Урок обществознания 11 класс Терехова И.Н., учитель истории и обществознания МБОУ СОШ № 155 г.о. Самара  Урок обучения грамоте "Знакомство со звуками [п], [п'] и буквами П, п"
Урок обучения грамоте "Знакомство со звуками [п], [п'] и буквами П, п" Молитва сердце очищает. Должники
Молитва сердце очищает. Должники Курский музыкальный колледж-интернат слепых
Курский музыкальный колледж-интернат слепых  Управление рисками проекта
Управление рисками проекта Русский Авангард. Русский авангард – общий термин для обозначения значительного явления в искусстве, процветавшем в России с 1
Русский Авангард. Русский авангард – общий термин для обозначения значительного явления в искусстве, процветавшем в России с 1 Реконструкция водопроводной сети с.Мамырсу Аягозского района Восточно-Казахстанской области
Реконструкция водопроводной сети с.Мамырсу Аягозского района Восточно-Казахстанской области Экономическое учение Адама Смита Подготовил: студент группы ДЭН-202 Корнеев Алексей
Экономическое учение Адама Смита Подготовил: студент группы ДЭН-202 Корнеев Алексей Електричний струм. Закон Ома
Електричний струм. Закон Ома Формування нових галузей внаслідок поєднання оптики, електроніки та механіки. (Рисунки та таблиці)
Формування нових галузей внаслідок поєднання оптики, електроніки та механіки. (Рисунки та таблиці) Клод Моне «Клод Моне читает газету» Ренуар. 1872
Клод Моне «Клод Моне читает газету» Ренуар. 1872 Счетчики. Асинхронные счетчики
Счетчики. Асинхронные счетчики