- Методы поиска экстремума

Содержание
- 2. Классификация методов математического программирования
- 3. В САПР основными методами оптимизации являются поисковые методы.
- 4. Поисковые методы основаны на пошаговом изменении управляемых параметров
- 5. В большинстве методов приращение вектора управляемых параметров вычисляется по формуле Хk - значение вектора управляемых параметров
- 6. Следовательно, если выполняются условия сходимости, то реализуется пошаговое (итерационное) приближение к экстремуму.
- 7. Методы оптимизации классифицируют по ряду признаков:
- 8. В зависимости от числа управляемых параметров различают методы одномерной (управляемый параметр единственный) и многомерной (размер вектора
- 9. Различают методы условной и безусловной оптимизации по наличию или отсутствию ограничений. Для реальных задач характерно наличие
- 10. В зависимости от числа экстремумов различают задачи одно- и многоэкстремальные. Локальный метод ориентирован на определение какого-либо
- 11. Методы нескольких порядков различают по использованию при поиске производных целевой функции по управляемым параметрам. Если производные
- 12. Методы первого порядка называют также градиентными, поскольку вектор первых производных F(X) по N есть градиент целевой
- 13. Конкретные методы определяются следующими факторами: 1) способом вычисления направления поиска g(Xk) в формуле ; 2) способом
- 14. Шаг может быть постоянным или выбираться исходя из одномерной оптимизации — поиска минимума целевой функции в
- 15. Правило окончания поиска: если на протяжении r подряд идущих шагов траектория поиска остается в малой ε-окрестности
- 16. Необходимые условия экстремума
- 17. В задачах безусловной оптимизации необходимые условия представляют собой равенство нулю градиента целевой функции
- 18. Базовая (общая) задача оптимизации ставится как задача математического программирования: где F(X) — целевая функция, X —
- 19. В общей задаче математического программирования необходимые условия экстремума (условия Куна-Таккера) формулируются: для того, чтобы точка Q
- 20. Абстрактная формулировка условий имеет простой геометрический смысл
- 21. Рассмотрим случай с ограничениями только типа неравенств. Если максимум находится внутри допустимой области R, то, выбирая
- 22. Наоборот, если точка не является экстремальной, то условие нельзя выполнить при любом выборе положительных коэффициентов ui
- 23. Методы поиска условных экстремумов
- 24. Широко известен метод множителей Лагранжа, ориентированный на поиск экстремума при наличии ограничений типа равенств ψ(X) =
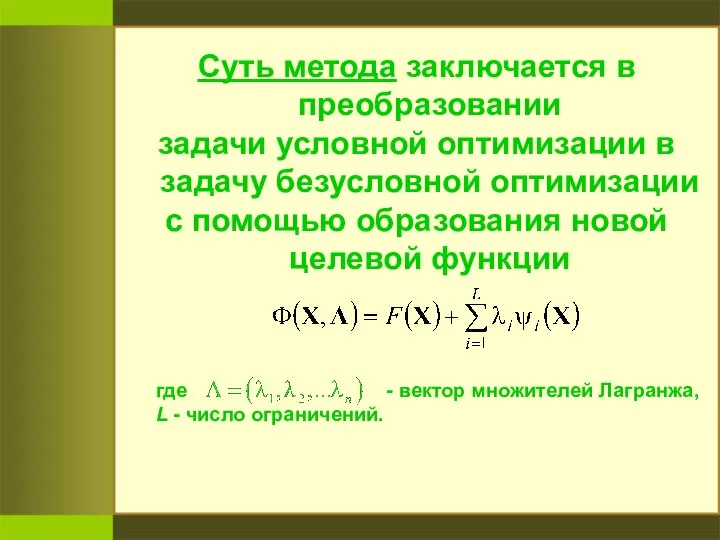
- 25. Суть метода заключается в преобразовании задачи условной оптимизации в задачу безусловной оптимизации с помощью образования новой
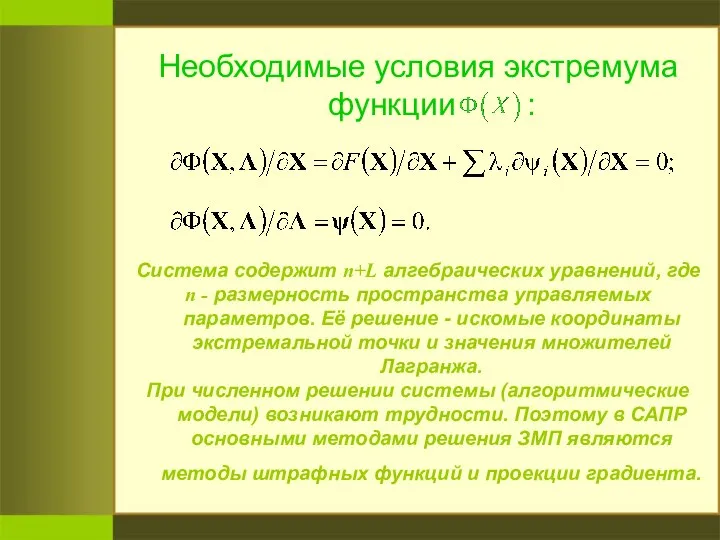
- 26. Необходимые условия экстремума функции : Система содержит n+L алгебраических уравнений, где n - размерность пространства управляемых
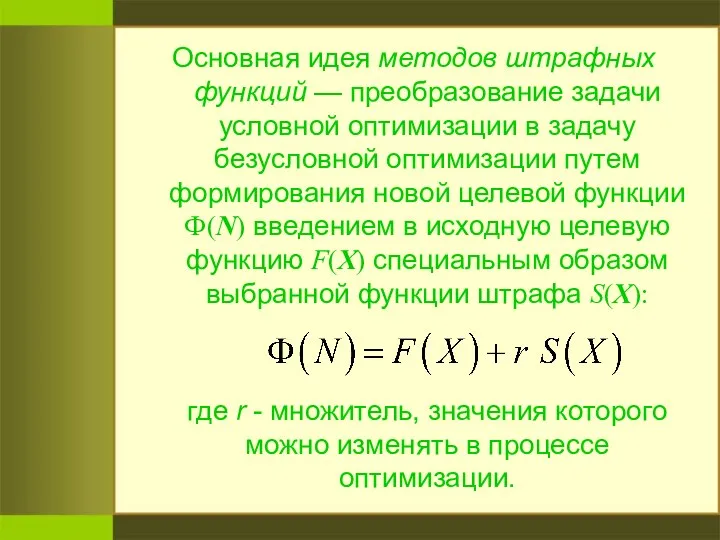
- 27. Основная идея методов штрафных функций — преобразование задачи условной оптимизации в задачу безусловной оптимизации путем формирования
- 28. Среди методов штрафных функций различают методы внутренней и внешней точки. Согласно методам внутренней точки (методам барьерных
- 29. Ситуация появления барьера у целевой функции Ф(х) и соотношение между условным в точке х2 и безусловным
- 30. Примеры штрафных функций: для метода внутренней точки при ограничениях где m - число ограничений типа неравенств;
- 31. Чем больше коэффициент r, тем точнее решение задачи, однако при больших r может ухудшаться ее обусловленность.
- 32. Основной вариант метода проекции градиента ориентирован на задачи математического программирования c ограничениями типа равенств.
- 33. Поиск при выполнении ограничений осуществляется в подпространстве (n-m) измерений, где n - число управляемых параметров, m
- 34. Поиск минимума начинают со спуска из исходной точки на гиперповерхность ограничений. Далее выполняют шаг в указанном
- 35. Идею метода поясним для случая поиска в двумерном пространстве при одном ограничении ψ(X) = 0.
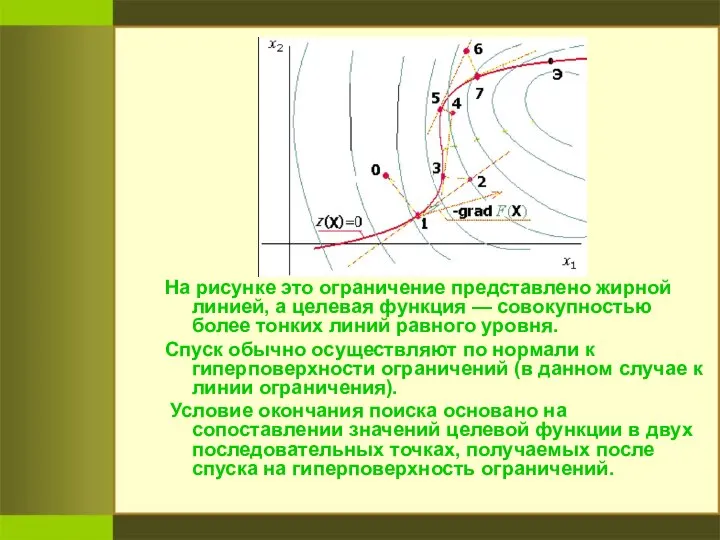
- 36. На рисунке это ограничение представлено жирной линией, а целевая функция — совокупностью более тонких линий равного
- 37. Рассмотрим получение аналитических выражений для направлений спуска и движения вдоль гиперповерхности ограничений.
- 38. Спуск Необходимо из текущей точки поиска В попасть в точку А, являющуюся ближайшей к В точкой
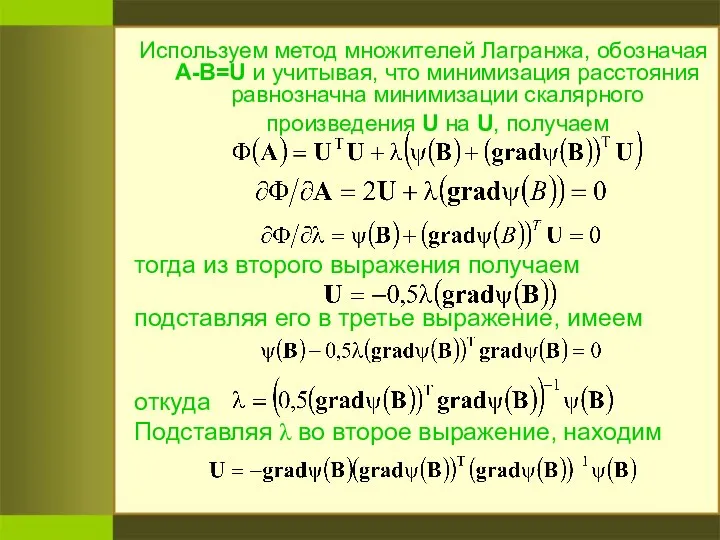
- 39. Используем метод множителей Лагранжа, обозначая А-В=U и учитывая, что минимизация расстояния равнозначна минимизации скалярного произведения U
- 40. Движение вдоль гиперповерхности ограничений Шаг в гиперплоскости D, касательной к гиперповерхности ограничений, следует сделать в направлении
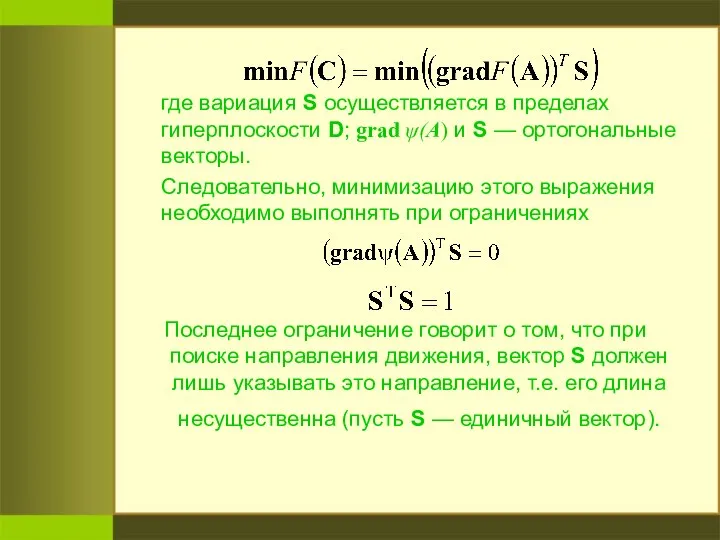
- 41. Уменьшение целевой функции при переходе из точки А в новую точку С подсчитывают, используя формулу линеаризации
- 42. где вариация S осуществляется в пределах гиперплоскости D; grad ψ(A) и S — ортогональные векторы. Следовательно,
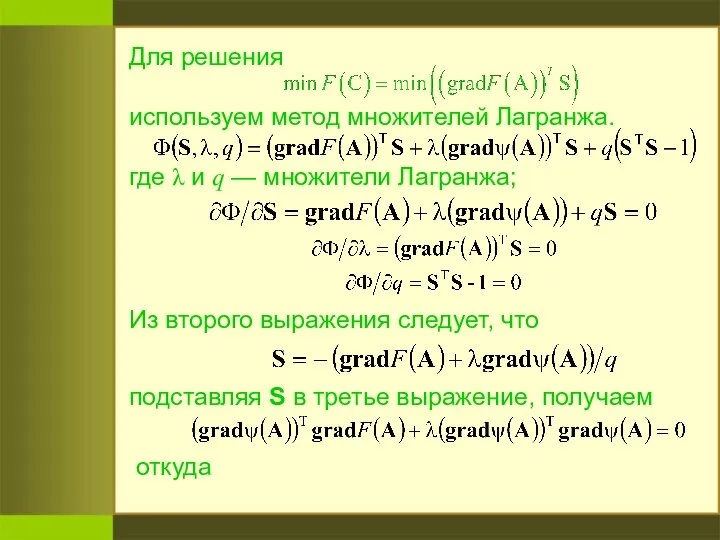
- 43. Для решения используем метод множителей Лагранжа. где λ и q — множители Лагранжа; Из второго выражения
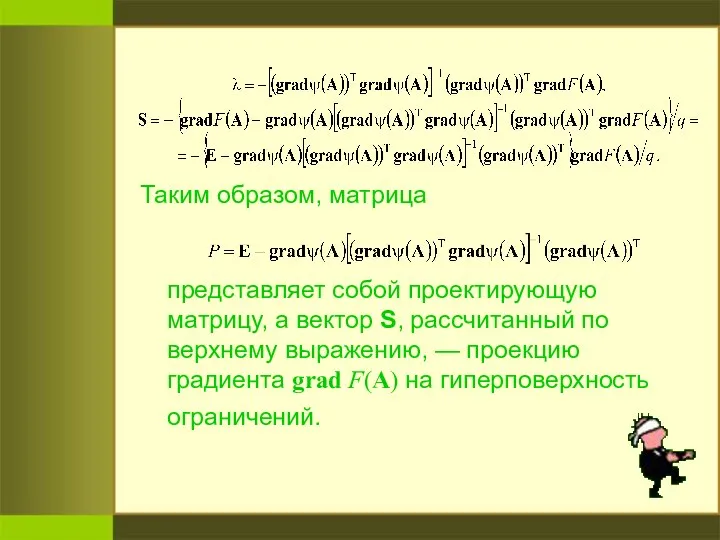
- 44. Таким образом, матрица представляет собой проектирующую матрицу, а вектор S, рассчитанный по верхнему выражению, — проекцию
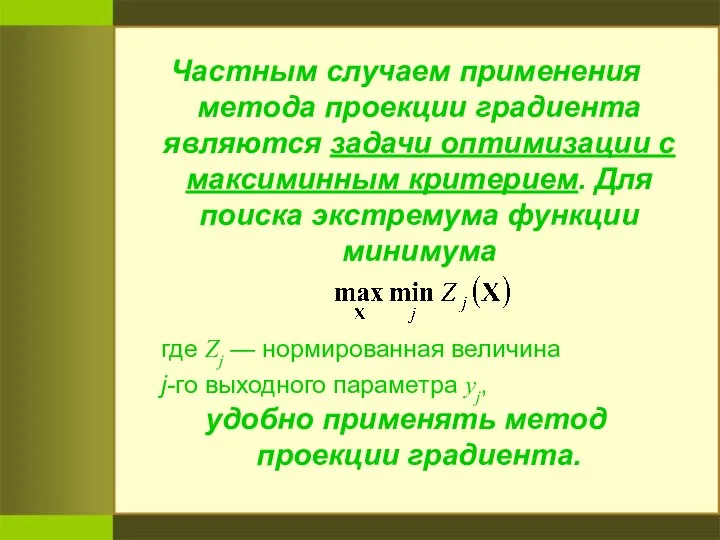
- 45. Частным случаем применения метода проекции градиента являются задачи оптимизации с максиминным критерием. Для поиска экстремума функции
- 46. В качестве ограничений задачи в исходной постановке фигурируют только прямые ограничения Здесь хmaxi и xmini —
- 48. Скачать презентацию
Классификация методов математического программирования
Классификация методов математического программирования
В САПР основными методами оптимизации являются
поисковые методы.
В САПР основными методами оптимизации являются
поисковые методы.
Поисковые методы основаны
на пошаговом изменении управляемых параметров
Поисковые методы основаны
на пошаговом изменении управляемых параметров
В большинстве методов приращение
вектора управляемых параметров вычисляется по формуле
Хk
В большинстве методов приращение
вектора управляемых параметров вычисляется по формуле
Хk
Следовательно, если выполняются условия сходимости, то реализуется пошаговое (итерационное) приближение к
Следовательно, если выполняются условия сходимости, то реализуется пошаговое (итерационное) приближение к
Методы оптимизации классифицируют
по ряду признаков:
по ряду признаков:
В зависимости от числа управляемых параметров различают методы одномерной (управляемый параметр
В зависимости от числа управляемых параметров различают методы одномерной (управляемый параметр
Различают методы условной и безусловной оптимизации по наличию или отсутствию ограничений.
Различают методы условной и безусловной оптимизации по наличию или отсутствию ограничений.
В зависимости от числа экстремумов различают задачи одно- и многоэкстремальные.
Локальный метод
В зависимости от числа экстремумов различают задачи одно- и многоэкстремальные.
Локальный метод
Методы нескольких порядков различают по использованию при поиске производных целевой функции
Методы нескольких порядков различают по использованию при поиске производных целевой функции
Методы первого порядка называют также градиентными,
поскольку вектор первых производных F(X)
Методы первого порядка называют также градиентными,
поскольку вектор первых производных F(X)
Конкретные методы определяются следующими факторами:
1) способом вычисления направления поиска g(Xk) в
Конкретные методы определяются следующими факторами:
1) способом вычисления направления поиска g(Xk) в
Шаг может быть постоянным или выбираться исходя из одномерной оптимизации —
Шаг может быть постоянным или выбираться исходя из одномерной оптимизации —
Правило окончания поиска:
если на протяжении r подряд идущих шагов траектория
Правило окончания поиска:
если на протяжении r подряд идущих шагов траектория
Необходимые условия
экстремума
Необходимые условия
экстремума
В задачах безусловной оптимизации необходимые условия представляют собой равенство нулю градиента
В задачах безусловной оптимизации необходимые условия представляют собой равенство нулю градиента
Базовая (общая) задача оптимизации ставится как задача математического программирования:
где F(X)
Базовая (общая) задача оптимизации ставится как задача математического программирования:
где F(X)
В общей задаче математического программирования необходимые условия экстремума (условия Куна-Таккера) формулируются:
В общей задаче математического программирования необходимые условия экстремума (условия Куна-Таккера) формулируются:
Абстрактная формулировка условий имеет простой геометрический смысл

Рассмотрим случай с ограничениями только типа неравенств.
Если максимум находится внутри допустимой
Рассмотрим случай с ограничениями только типа неравенств.
Если максимум находится внутри допустимой

Наоборот, если точка не является экстремальной, то условие
нельзя выполнить при любом
Наоборот, если точка не является экстремальной, то условие
нельзя выполнить при любом
Методы поиска условных экстремумов
Широко известен метод множителей Лагранжа, ориентированный на поиск экстремума при наличии
Широко известен метод множителей Лагранжа, ориентированный на поиск экстремума при наличии
Суть метода заключается в преобразовании
задачи условной оптимизации в задачу безусловной
Суть метода заключается в преобразовании
задачи условной оптимизации в задачу безусловной
Необходимые условия экстремума функции :
Система содержит n+L алгебраических уравнений, где
n
Необходимые условия экстремума функции :
Система содержит n+L алгебраических уравнений, где
n
Основная идея методов штрафных функций — преобразование задачи условной оптимизации в
Основная идея методов штрафных функций — преобразование задачи условной оптимизации в

Среди методов штрафных функций различают методы внутренней и внешней точки.
Согласно
Среди методов штрафных функций различают методы внутренней и внешней точки.
Согласно

Ситуация появления барьера у целевой функции Ф(х) и соотношение между условным
Ситуация появления барьера у целевой функции Ф(х) и соотношение между условным
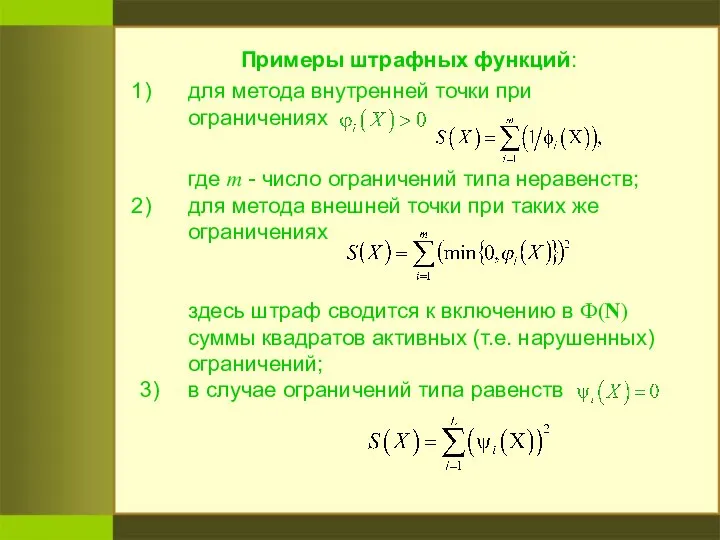
Примеры штрафных функций:
для метода внутренней точки при ограничениях
где m -
Примеры штрафных функций:
для метода внутренней точки при ограничениях
где m -
Чем больше коэффициент r, тем точнее решение задачи, однако при больших
Чем больше коэффициент r, тем точнее решение задачи, однако при больших
Основной вариант
метода проекции градиента ориентирован на задачи математического программирования c
Основной вариант
метода проекции градиента ориентирован на задачи математического программирования c
Поиск при выполнении ограничений осуществляется в подпространстве
(n-m) измерений,
где n
Поиск при выполнении ограничений осуществляется в подпространстве
(n-m) измерений,
где n
Поиск минимума начинают со спуска из исходной точки на гиперповерхность ограничений.
Поиск минимума начинают со спуска из исходной точки на гиперповерхность ограничений.
Идею метода поясним для случая поиска в двумерном пространстве при одном
На рисунке это ограничение представлено жирной линией, а целевая функция —
На рисунке это ограничение представлено жирной линией, а целевая функция —
Рассмотрим получение аналитических выражений для направлений спуска и движения вдоль гиперповерхности
Рассмотрим получение аналитических выражений для направлений спуска и движения вдоль гиперповерхности
Спуск
Необходимо из текущей точки поиска В попасть в точку А,
Спуск
Необходимо из текущей точки поиска В попасть в точку А,
Используем метод множителей Лагранжа, обозначая А-В=U и учитывая, что минимизация расстояния
Используем метод множителей Лагранжа, обозначая А-В=U и учитывая, что минимизация расстояния
Движение вдоль гиперповерхности ограничений
Шаг в гиперплоскости D, касательной к гиперповерхности
Движение вдоль гиперповерхности ограничений
Шаг в гиперплоскости D, касательной к гиперповерхности
Уменьшение целевой функции при переходе из точки А в новую точку
Уменьшение целевой функции при переходе из точки А в новую точку
где вариация S осуществляется в пределах гиперплоскости D; grad ψ(A) и
Для решения
используем метод множителей Лагранжа.
где λ и q — множители Лагранжа;
Из
Для решения
используем метод множителей Лагранжа.
где λ и q — множители Лагранжа;
Из
Таким образом, матрица
представляет собой проектирующую матрицу, а вектор S, рассчитанный
Таким образом, матрица
представляет собой проектирующую матрицу, а вектор S, рассчитанный
Частным случаем применения метода проекции градиента являются задачи оптимизации с максиминным
Частным случаем применения метода проекции градиента являются задачи оптимизации с максиминным
В качестве ограничений задачи в исходной постановке фигурируют только прямые ограничения
Здесь
В качестве ограничений задачи в исходной постановке фигурируют только прямые ограничения
Здесь
 Мир животных. Изучение интересных животных и их особенностей, посредством решения математических заданий и задач - презентация дл
Мир животных. Изучение интересных животных и их особенностей, посредством решения математических заданий и задач - презентация дл Владилен Владимирович Фуфаров - Управляющий ОАО «СМАК»
Владилен Владимирович Фуфаров - Управляющий ОАО «СМАК» Экономическая характеристика в абсолютных и относительных величинах 1991-2012 России и развитых стран мира
Экономическая характеристика в абсолютных и относительных величинах 1991-2012 России и развитых стран мира Weihnachten ist das größte Fest in Deutschland
Weihnachten ist das größte Fest in Deutschland Применение спортивного массажа в восстановительном цикле футболистов 16-17 лет
Применение спортивного массажа в восстановительном цикле футболистов 16-17 лет Опыт взаимодействия Роскомнадзора с интернет-компаниями по пресечению распространения экстремистского контента
Опыт взаимодействия Роскомнадзора с интернет-компаниями по пресечению распространения экстремистского контента Движение по окружности. Решение задач
Движение по окружности. Решение задач Денежно-кредитная политика: основные направления, инструменты, проблемы
Денежно-кредитная политика: основные направления, инструменты, проблемы  Школа социальных систем Подготовили: Студенты I курса экономического факультета РТА Юсов Алексей и Сафонов Михаил М112б 2012
Школа социальных систем Подготовили: Студенты I курса экономического факультета РТА Юсов Алексей и Сафонов Михаил М112б 2012  Конкуренция. Структура рынка Урок экономики. 9 класс
Конкуренция. Структура рынка Урок экономики. 9 класс Независимое поведение: объемная конкуренция. Модель Курно. Выполнила студентка 1 курса экономического факультета Редок Полина
Независимое поведение: объемная конкуренция. Модель Курно. Выполнила студентка 1 курса экономического факультета Редок Полина Законы экологии и природопользования
Законы экологии и природопользования Полупроводниковые лазеры
Полупроводниковые лазеры Презентация на тему "Гимнастика 5-11 класс" - скачать презентации по Педагогике
Презентация на тему "Гимнастика 5-11 класс" - скачать презентации по Педагогике Перечень работ, которые могут быть выполнены на кафедре промышленного и гражданского строительства (ПГС)
Перечень работ, которые могут быть выполнены на кафедре промышленного и гражданского строительства (ПГС) Презентация Понятие, признаки и классификация должностей федеральной гражданской службы
Презентация Понятие, признаки и классификация должностей федеральной гражданской службы  Основное назначение и возможности Word
Основное назначение и возможности Word  Самый полезный вид спорта
Самый полезный вид спорта Праздники Новый год и Рождество: сходства и различия
Праздники Новый год и Рождество: сходства и различия Идеал человека в христианстве
Идеал человека в христианстве Тесты по обществоведению
Тесты по обществоведению Занимательная математика Алгебра и начала математического анализа, 10 класс.
Занимательная математика Алгебра и начала математического анализа, 10 класс.  Презентация Свободные экономические зоны во Франции
Презентация Свободные экономические зоны во Франции Предмет и методы политологии
Предмет и методы политологии Проектирование сети связи на базе медных и волоконно-оптических линий связи
Проектирование сети связи на базе медных и волоконно-оптических линий связи Герменевтика – наука и искусство толкования Священного Писания
Герменевтика – наука и искусство толкования Священного Писания Правила Карьеры Ник Фролов
Правила Карьеры Ник Фролов Урок как педагогический феномен
Урок как педагогический феномен