- Механизмы синхронизации

Содержание
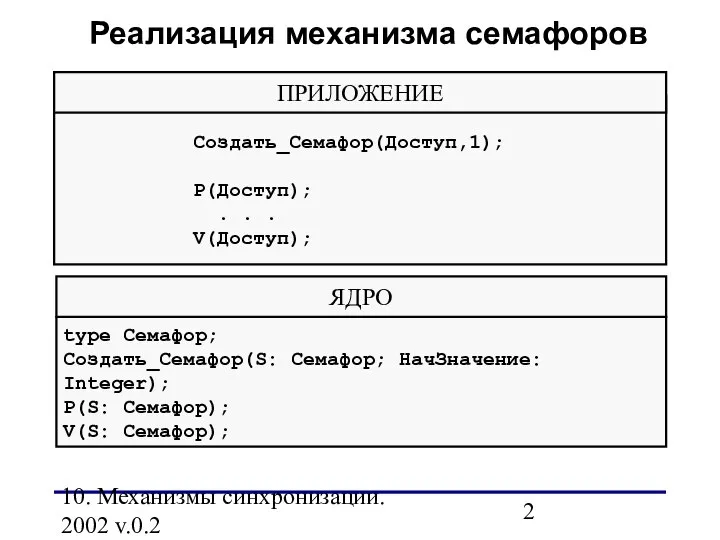
- 2. 10. Механизмы синхронизации. 2002 v.0.2 type Семафор; Создать_Семафор(S: Семафор; НачЗначение: Integer); P(S: Семафор); V(S: Семафор); ЯДРО
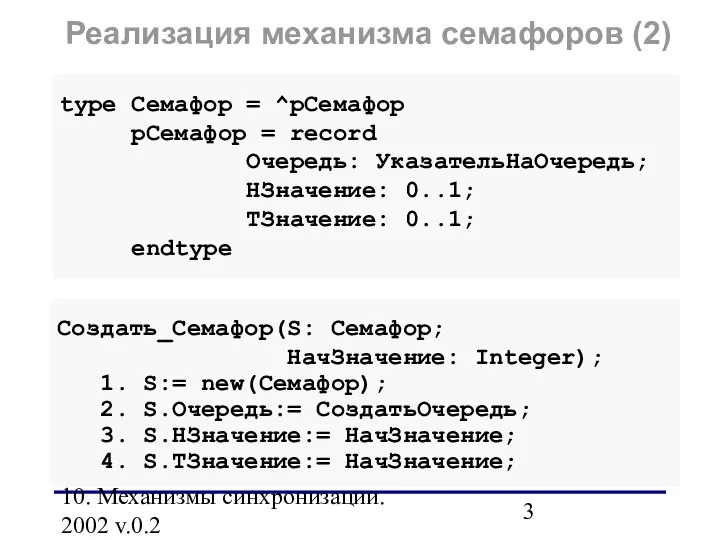
- 3. 10. Механизмы синхронизации. 2002 v.0.2 type Семафор = ^рСемафор рСемафор = record Очередь: УказательНаОчередь; НЗначение: 0..1;
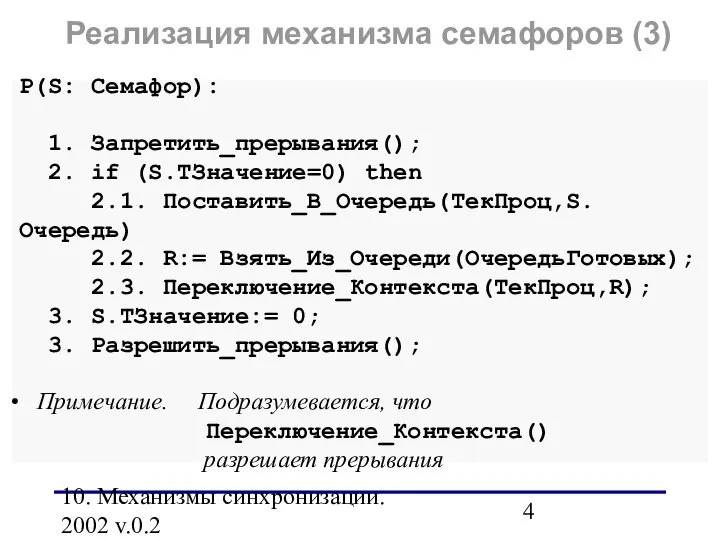
- 4. 10. Механизмы синхронизации. 2002 v.0.2 P(S: Семафор): 1. Запретить_прерывания(); 2. if (S.ТЗначение=0) then 2.1. Поставить_В_Очередь(ТекПроц,S.Очередь) 2.2.
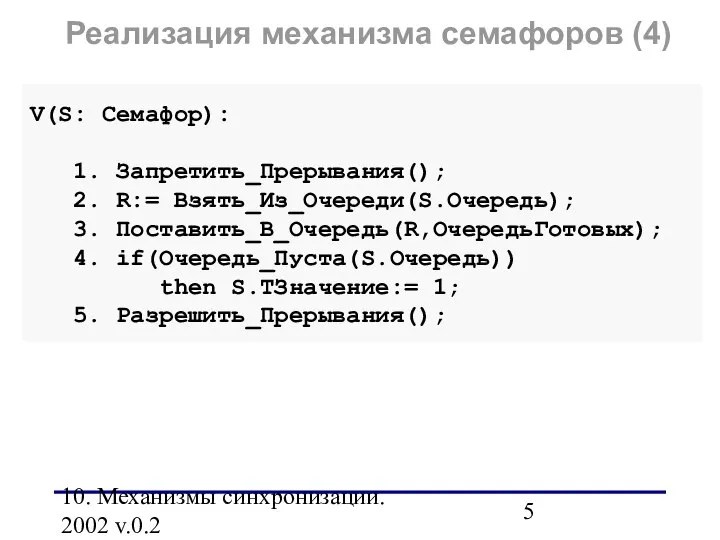
- 5. 10. Механизмы синхронизации. 2002 v.0.2 V(S: Семафор): 1. Запретить_Прерывания(); 2. R:= Взять_Из_Очереди(S.Очередь); 3. Поставить_В_Очередь(R,ОчередьГотовых); 4. if(Очередь_Пуста(S.Очередь))
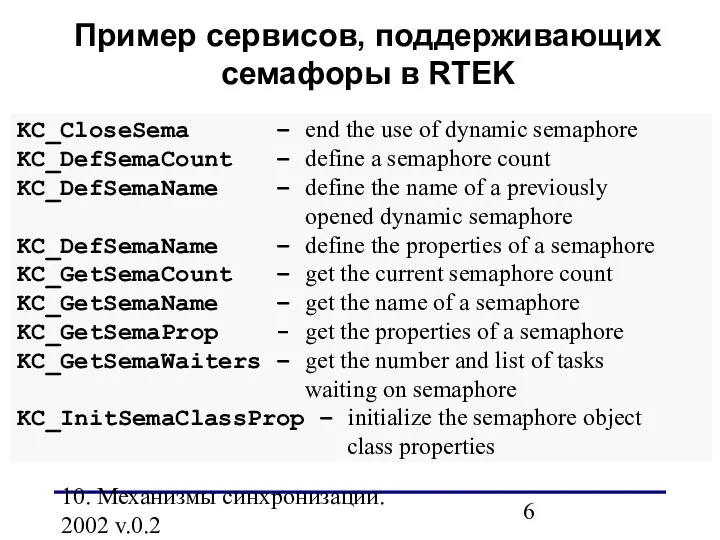
- 6. 10. Механизмы синхронизации. 2002 v.0.2 Пример сервисов, поддерживающих семафоры в RTEK KC_CloseSema – end the use
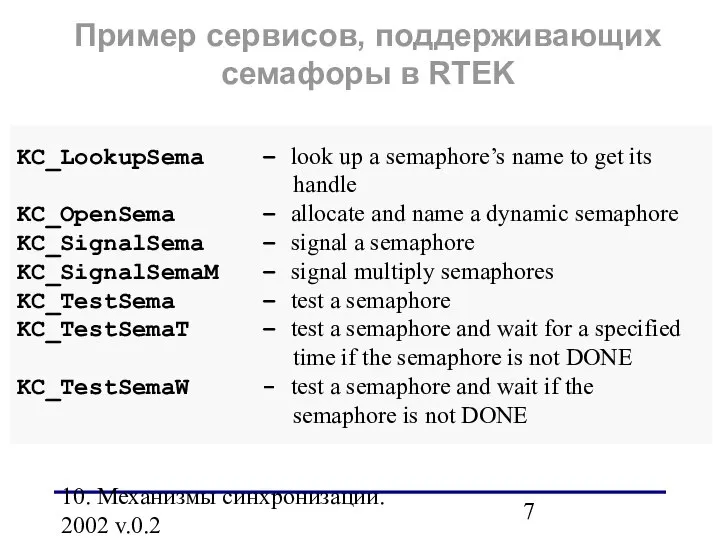
- 7. 10. Механизмы синхронизации. 2002 v.0.2 KC_LookupSema – look up a semaphore’s name to get its handle
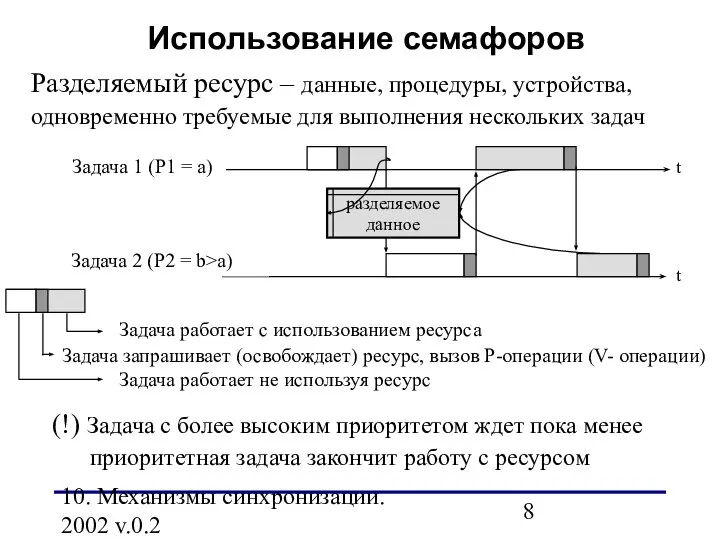
- 8. 10. Механизмы синхронизации. 2002 v.0.2 Разделяемый ресурс – данные, процедуры, устройства, одновременно требуемые для выполнения нескольких
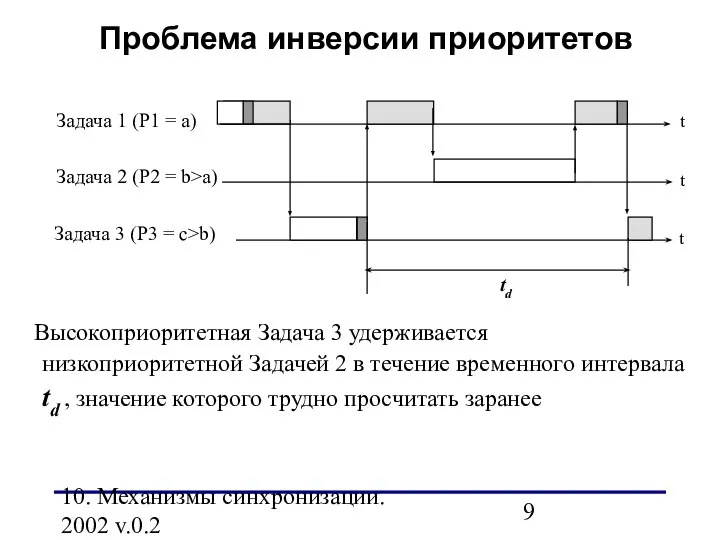
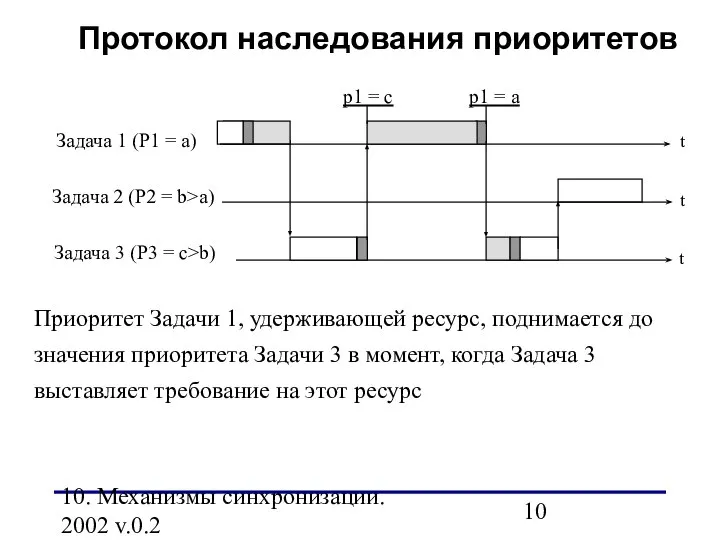
- 9. 10. Механизмы синхронизации. 2002 v.0.2 Высокоприоритетная Задача 3 удерживается низкоприоритетной Задачей 2 в течение временного интервала
- 10. 10. Механизмы синхронизации. 2002 v.0.2 Протокол наследования приоритетов Задача 1 (Р1 = а) t Задача 3
- 11. 10. Механизмы синхронизации. 2002 v.0.2 Priority Ceiling протокол Задача 1 (Р1 = а) t Задача 3
- 12. 10. Механизмы синхронизации. 2002 v.0.2 Недостатки механизма семафоров Низкий уровень, слабая защищенность от ошибок при программировании
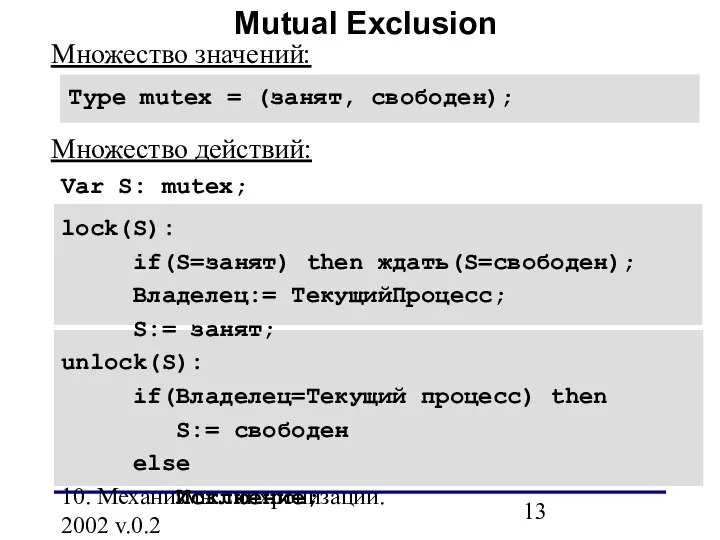
- 13. 10. Механизмы синхронизации. 2002 v.0.2 Mutual Exclusion Type mutex = (занят, свободен); Множество значений: Множество действий:
- 14. 10. Механизмы синхронизации. 2002 v.0.2 Mutual Exclusion (2) Создать_Mutex(S); Приложение Задача 1 - владелец t Задача
- 15. 10. Механизмы синхронизации. 2002 v.0.2 type mutex = ^рMutex рMutex = record Очередь: УказательНаОчередь; Состояние: занят,
- 16. 10. Механизмы синхронизации. 2002 v.0.2 Реализация mutex (2) Реализация протокола наследования приоритетов требует модификации дескриптора задачи
- 17. 10. Механизмы синхронизации. 2002 v.0.2 lock(S: mutex): 1. Запретить_Прерывания; 2. if(S.Состояние=занят) then 2.1. S.Владелец.ТПриоритет:= ТекПроц.Приоритет; 2.2.
- 19. Скачать презентацию
10. Механизмы синхронизации. 2002 v.0.2
type Семафор;
Создать_Семафор(S: Семафор; НачЗначение: Integer);
P(S: Семафор);
V(S: Семафор);
ЯДРО
Реализация
10. Механизмы синхронизации. 2002 v.0.2
type Семафор;
Создать_Семафор(S: Семафор; НачЗначение: Integer);
P(S: Семафор);
V(S: Семафор);
ЯДРО
Реализация
10. Механизмы синхронизации. 2002 v.0.2
type Семафор = ^рСемафор
рСемафор = record
10. Механизмы синхронизации. 2002 v.0.2
type Семафор = ^рСемафор
рСемафор = record
10. Механизмы синхронизации. 2002 v.0.2
P(S: Семафор):
1. Запретить_прерывания();
2. if (S.ТЗначение=0)
10. Механизмы синхронизации. 2002 v.0.2
P(S: Семафор):
1. Запретить_прерывания();
2. if (S.ТЗначение=0)
10. Механизмы синхронизации. 2002 v.0.2
V(S: Семафор):
1. Запретить_Прерывания();
2. R:= Взять_Из_Очереди(S.Очередь);
10. Механизмы синхронизации. 2002 v.0.2
V(S: Семафор):
1. Запретить_Прерывания();
2. R:= Взять_Из_Очереди(S.Очередь);
10. Механизмы синхронизации. 2002 v.0.2
Пример сервисов, поддерживающих семафоры в RTEK
KC_CloseSema –
10. Механизмы синхронизации. 2002 v.0.2
Пример сервисов, поддерживающих семафоры в RTEK
KC_CloseSema –
10. Механизмы синхронизации. 2002 v.0.2
KC_LookupSema – look up a semaphore’s name
10. Механизмы синхронизации. 2002 v.0.2
KC_LookupSema – look up a semaphore’s name
10. Механизмы синхронизации. 2002 v.0.2
Разделяемый ресурс – данные, процедуры, устройства, одновременно
10. Механизмы синхронизации. 2002 v.0.2
Разделяемый ресурс – данные, процедуры, устройства, одновременно
10. Механизмы синхронизации. 2002 v.0.2
Высокоприоритетная Задача 3 удерживается низкоприоритетной Задачей 2
10. Механизмы синхронизации. 2002 v.0.2
Высокоприоритетная Задача 3 удерживается низкоприоритетной Задачей 2
10. Механизмы синхронизации. 2002 v.0.2
Протокол наследования приоритетов
Задача 1 (Р1 = а)
t
Задача
10. Механизмы синхронизации. 2002 v.0.2
Протокол наследования приоритетов
Задача 1 (Р1 = а)
t
Задача
10. Механизмы синхронизации. 2002 v.0.2
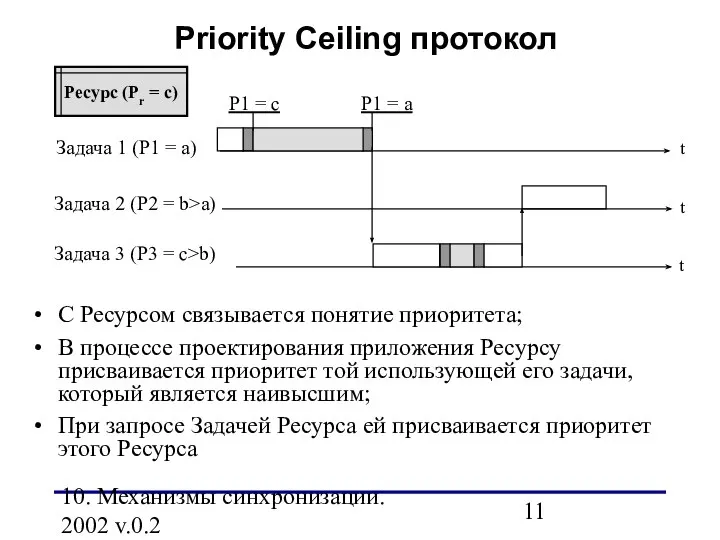
Priority Ceiling протокол
Задача 1 (Р1 = а)
t
Задача
10. Механизмы синхронизации. 2002 v.0.2
Priority Ceiling протокол
Задача 1 (Р1 = а)
t
Задача
10. Механизмы синхронизации. 2002 v.0.2
Недостатки механизма семафоров
Низкий уровень, слабая защищенность от
10. Механизмы синхронизации. 2002 v.0.2
Недостатки механизма семафоров
Низкий уровень, слабая защищенность от
10. Механизмы синхронизации. 2002 v.0.2
Mutual Exclusion
Type mutex = (занят, свободен);
Множество
10. Механизмы синхронизации. 2002 v.0.2
Mutual Exclusion
Type mutex = (занят, свободен);
Множество
10. Механизмы синхронизации. 2002 v.0.2
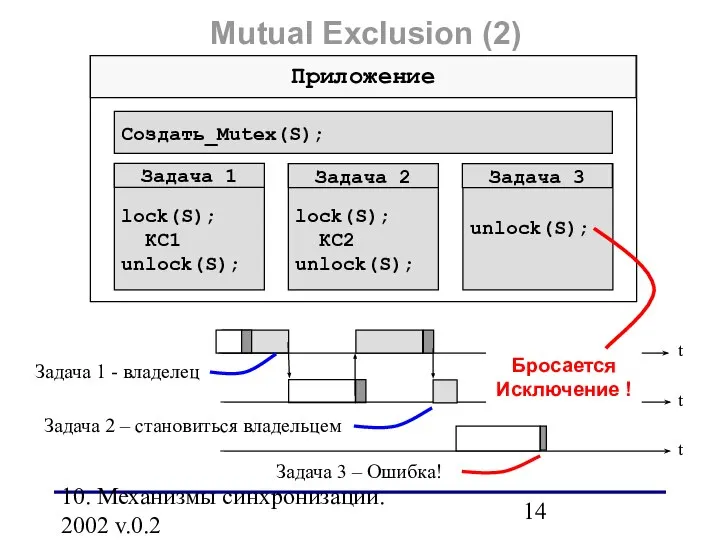
Mutual Exclusion (2)
Создать_Mutex(S);
Приложение
Задача 1 - владелец
t
Задача 3
10. Механизмы синхронизации. 2002 v.0.2
Mutual Exclusion (2)
Создать_Mutex(S);
Приложение
Задача 1 - владелец
t
Задача 3
10. Механизмы синхронизации. 2002 v.0.2
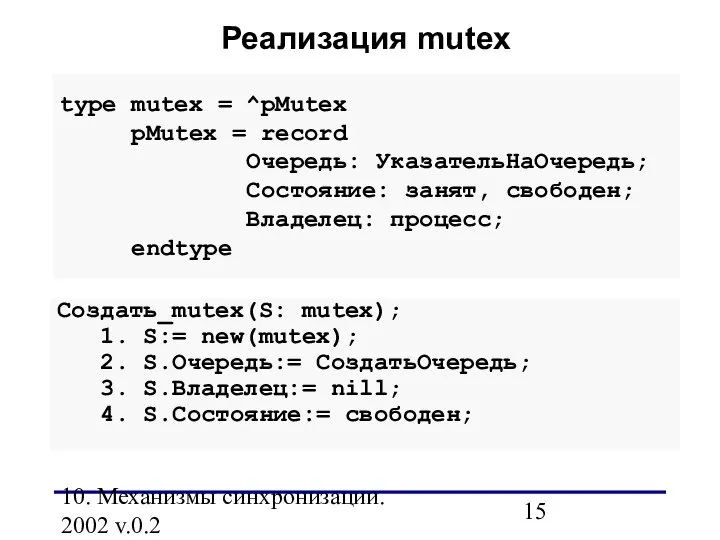
type mutex = ^рMutex
рMutex = record
10. Механизмы синхронизации. 2002 v.0.2
type mutex = ^рMutex
рMutex = record
10. Механизмы синхронизации. 2002 v.0.2
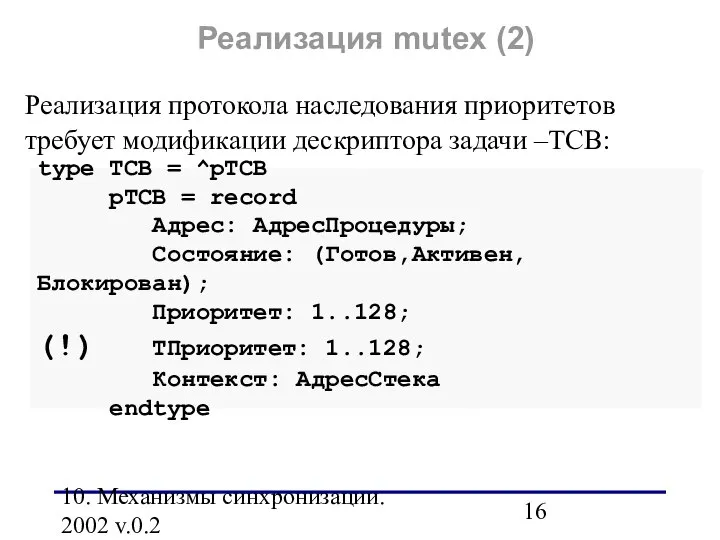
Реализация mutex (2)
Реализация протокола наследования приоритетов требует
10. Механизмы синхронизации. 2002 v.0.2
Реализация mutex (2)
Реализация протокола наследования приоритетов требует
10. Механизмы синхронизации. 2002 v.0.2
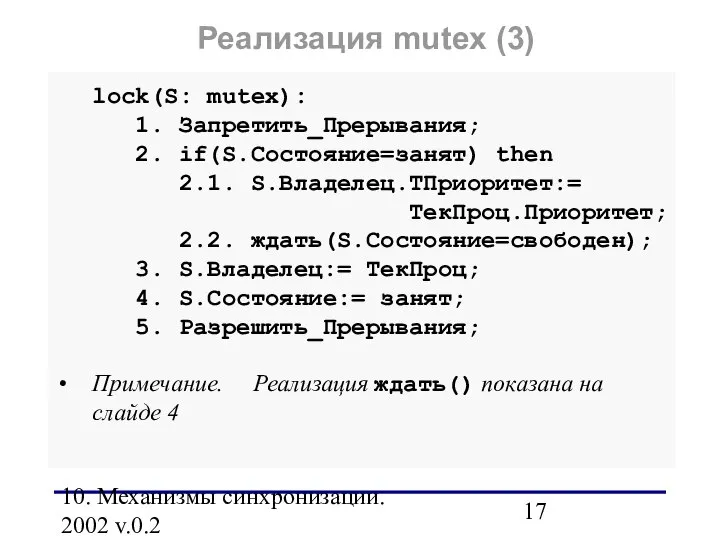
lock(S: mutex):
1. Запретить_Прерывания;
2. if(S.Состояние=занят) then
10. Механизмы синхронизации. 2002 v.0.2
lock(S: mutex):
1. Запретить_Прерывания;
2. if(S.Состояние=занят) then
 Инфраструктура рынка. Рынок труда. Интегрированный урок обществознания и информационных технологий 9 класс
Инфраструктура рынка. Рынок труда. Интегрированный урок обществознания и информационных технологий 9 класс  Файловые архивы
Файловые архивы Влияние клубеньковых бактерий на севооборот
Влияние клубеньковых бактерий на севооборот Дисциплина: Бухгалтерский (финансовый) учет Преподаватель к.э.н., доцент кафедры БУ и А., Василенко М.Е. .
Дисциплина: Бухгалтерский (финансовый) учет Преподаватель к.э.н., доцент кафедры БУ и А., Василенко М.Е. .  Презентация Уголовное право по Соборному Уложению 1649 г Система и составы преступлений; цели и система наказаний
Презентация Уголовное право по Соборному Уложению 1649 г Система и составы преступлений; цели и система наказаний Быт и нравы Древней Руси
Быт и нравы Древней Руси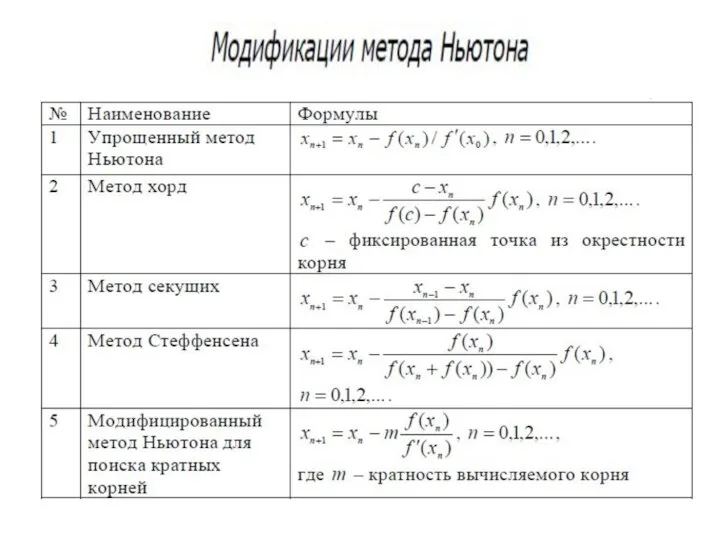 Модификация метода Ньютона
Модификация метода Ньютона  УРОК № 199 ОМЫВАТЕЛЬ СТЕКЛА
УРОК № 199 ОМЫВАТЕЛЬ СТЕКЛА Роль специальных налоговых режимов в экономике страны Бондарева Е.Д., ДС-01
Роль специальных налоговых режимов в экономике страны Бондарева Е.Д., ДС-01 Cпортивные сборы б/о «Лисичка» осень 2017
Cпортивные сборы б/о «Лисичка» осень 2017 Решение задач Выполнила: студентка 1 курса ЭФ, Холшевникова Оксана, группа Э111б
Решение задач Выполнила: студентка 1 курса ЭФ, Холшевникова Оксана, группа Э111б Политическая и правовая концепция М. Падуанского
Политическая и правовая концепция М. Падуанского Аттестационная работа. Краеведческий кружок «Мой родной край»
Аттестационная работа. Краеведческий кружок «Мой родной край» Электронная система зажигания
Электронная система зажигания Технология изготовления плательного ассортимента. Способы соединения лифа с юбкой
Технология изготовления плательного ассортимента. Способы соединения лифа с юбкой Эластичность спроса и предложения
Эластичность спроса и предложения  Частини мови. Числівник
Частини мови. Числівник Патио. План благоустройства
Патио. План благоустройства OOP with C#. Introduction C#. Data Types. Variables, expressions, statements. C# decision and iteration constructs
OOP with C#. Introduction C#. Data Types. Variables, expressions, statements. C# decision and iteration constructs Презентация на тему "Система взаимодействия школы и социума" - скачать презентации по Педагогике
Презентация на тему "Система взаимодействия школы и социума" - скачать презентации по Педагогике Виды лыжного спорта
Виды лыжного спорта Финансовая деятельность
Финансовая деятельность  Одномерные статические массивы (язык C)
Одномерные статические массивы (язык C) Передача цифровых сигналов в РРЛ и ССП. Технические характеристики РРС Р-169
Передача цифровых сигналов в РРЛ и ССП. Технические характеристики РРС Р-169 Подготовка учащихся 9-го класса к сдаче экзамена по алгебре в новой форме
Подготовка учащихся 9-го класса к сдаче экзамена по алгебре в новой форме  Духовное-нравственное слово
Духовное-нравственное слово Лучшие легкоатлеты России
Лучшие легкоатлеты России Архитектура постмодерна
Архитектура постмодерна