- Моделирование систем Цифровой Обработки Сигналов в среде LabVIEW

Содержание
- 2. Введение в LabVIEW Control Design and Simulation
- 3. Agenda Введение в разработку управляющих систем Системы идентификации Разработка динамических систем Моделирование Создание прототипа Управление двигателем
- 4. Приложения Flight Control Engine Control Precision Machine Control Control embedded in product Control used to manufacture
- 5. Разработка управляющих систем на базе моделей Задачи Повышение гибкости управления Увеличение производительности и Инструменты Системы сбора
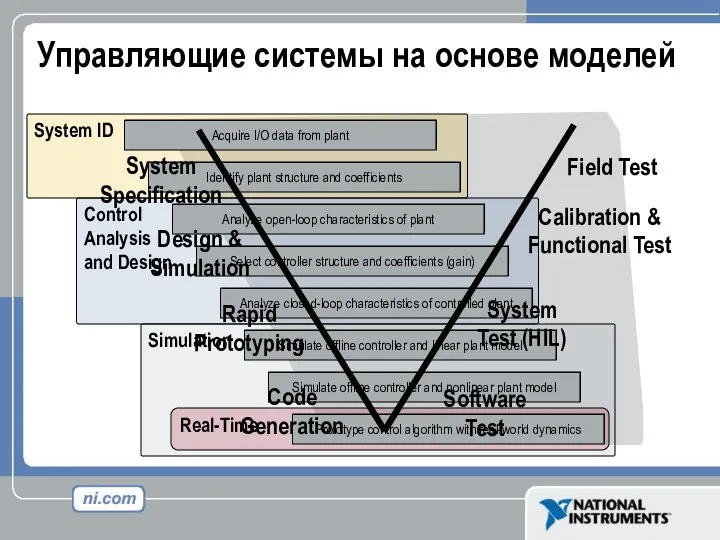
- 6. Control Analysis and Design System ID Управляющие системы на основе моделей
- 7. Архитектура управления и разработки Option A. Математическая модель Option B. Идентификация систем Kc Controller Kp Plant
- 8. Модель двигателя постоянного тока
- 9. Система идентификации двигателя постоянного тока DC Motor System Ввод: Управление двигателем (12V, PWM) Выход: квадратудный энкодер
- 10. Идентификация модели System Identification Toolkit Симулирование и измерение отклика Идентификация коэффицентов DI Quad Encoder LabVIEW Dev
- 11. Создание контроллера Control Design Toolkit Разработка и анализ контроллера LabVIEW Dev Sys LabVIEW Control Design Toolkit
- 12. Симулятор системы Simulation Module Симуляция систем управления LabVIEW Dev Sys LabVIEW Control Design Toolkit LabVIEW Simulation
- 13. Симуляция системы управления двигателем LabVIEW Graphical differencing Full programming environment (logic, etc.) Patented user interface capabilities
- 14. Создание прототипа на базе Real-Time Прототип с LabVIEW RT, RT PXI, cRIO, or RT on a
- 15. Создание прототипа контроллера Simulation Module and LabVIEW Real-Time Implement controller on real-time hardware Host PC LabVIEW
- 16. Бысрое создание прототипа LabVIEW Tight integration with real-world I/O Seamless transition from simulation to prototyping
- 17. LabVIEW Simulation Module Simulation Node Linear Systems Integrators, Derivatives, Transfer Functions Nonlinear Systems Friction, Saturation, Dead
- 19. Скачать презентацию

Введение в LabVIEW Control Design and Simulation
Введение в LabVIEW Control Design and Simulation
Agenda
Введение в разработку управляющих систем
Системы идентификации
Разработка динамических систем
Моделирование
Создание прототипа
Управление двигателем
Keep graphics
Agenda
Введение в разработку управляющих систем
Системы идентификации
Разработка динамических систем
Моделирование
Создание прототипа
Управление двигателем
Keep graphics
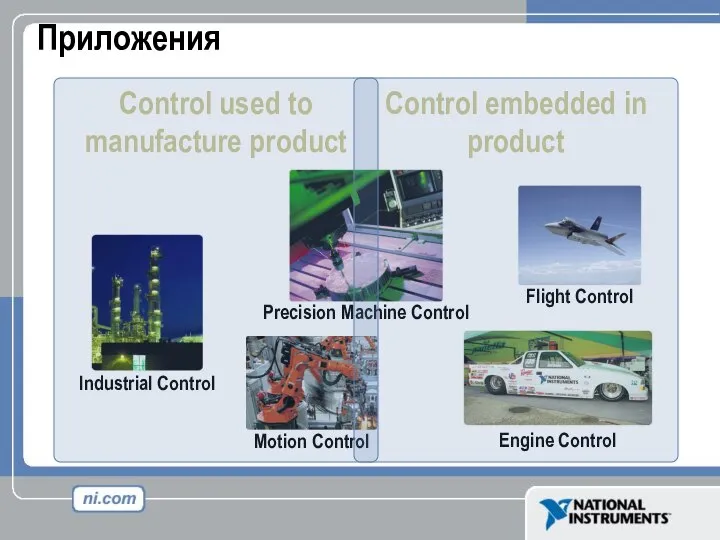
Приложения
Flight Control
Engine Control
Precision Machine Control
Control embedded in product
Control used to manufacture
Приложения
Flight Control
Engine Control
Precision Machine Control
Control embedded in product
Control used to manufacture
Разработка управляющих систем на базе моделей
Задачи
Повышение гибкости управления
Увеличение производительности и
Инструменты
Системы сбора
Разработка управляющих систем на базе моделей
Задачи
Повышение гибкости управления
Увеличение производительности и
Инструменты
Системы сбора
Control
Analysis
and Design
System ID
Управляющие системы на основе моделей
Control
Analysis
and Design
System ID
Управляющие системы на основе моделей
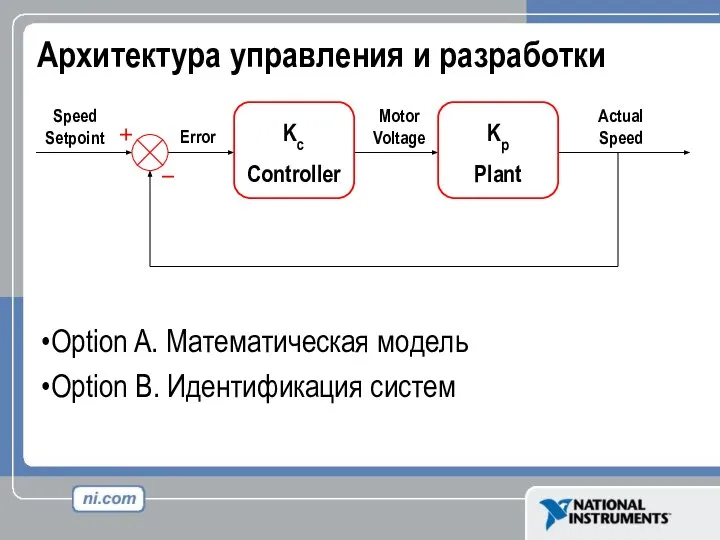
Архитектура управления и разработки
Option A. Математическая модель
Option B. Идентификация систем
Kc
Controller
Kp
Plant
Error
Motor Voltage
Actual
Архитектура управления и разработки
Option A. Математическая модель
Option B. Идентификация систем
Kc
Controller
Kp
Plant
Error
Motor Voltage
Actual
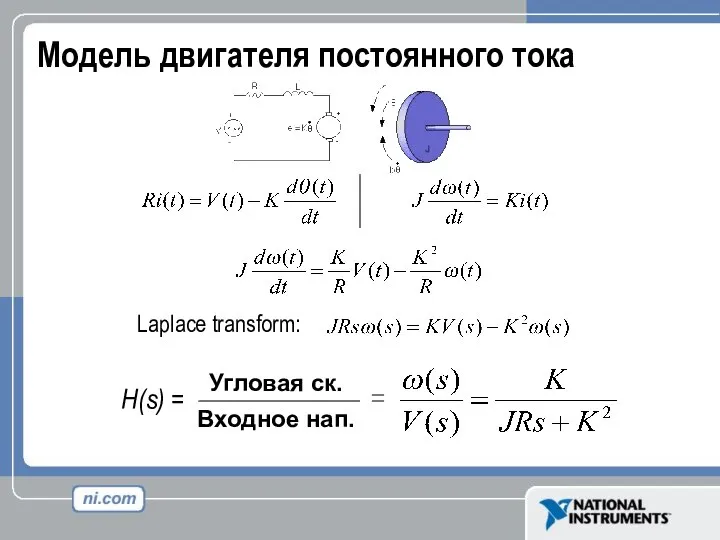
Модель двигателя постоянного тока
Модель двигателя постоянного тока
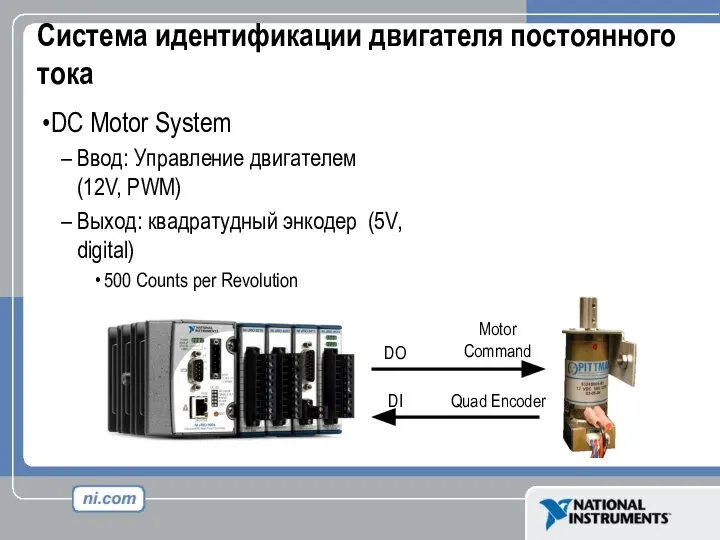
Система идентификации двигателя постоянного тока
DC Motor System
Ввод: Управление двигателем (12V, PWM)
Выход:
Система идентификации двигателя постоянного тока
DC Motor System
Ввод: Управление двигателем (12V, PWM)
Выход:
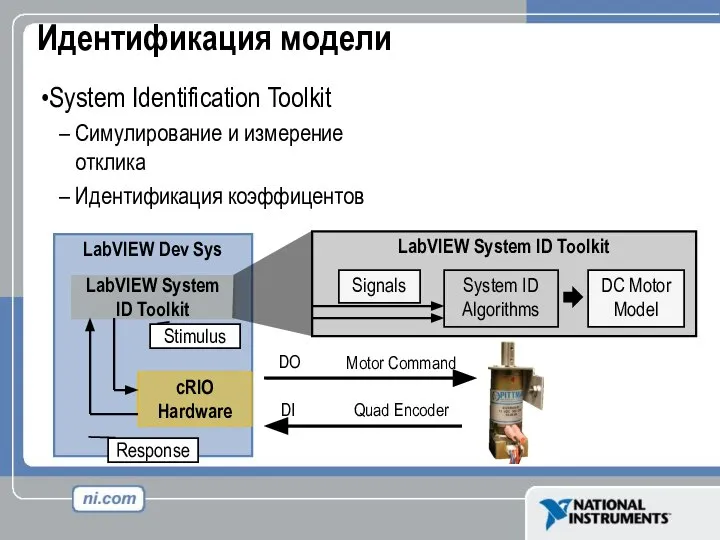
Идентификация модели
System Identification Toolkit
Симулирование и измерение отклика
Идентификация коэффицентов
DI
Quad Encoder
LabVIEW Dev Sys
Stimulus
Response
System
Идентификация модели
System Identification Toolkit
Симулирование и измерение отклика
Идентификация коэффицентов
DI
Quad Encoder
LabVIEW Dev Sys
Stimulus
Response
System
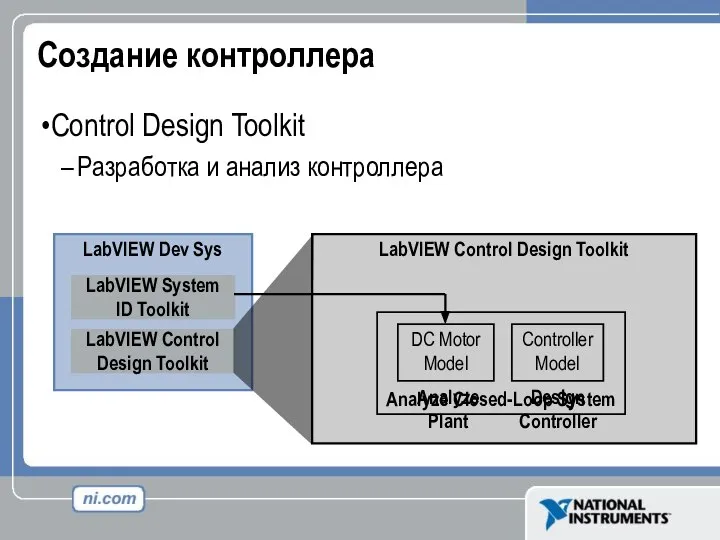
Создание контроллера
Control Design Toolkit
Разработка и анализ контроллера
LabVIEW Dev Sys
LabVIEW Control Design
Создание контроллера
Control Design Toolkit
Разработка и анализ контроллера
LabVIEW Dev Sys
LabVIEW Control Design
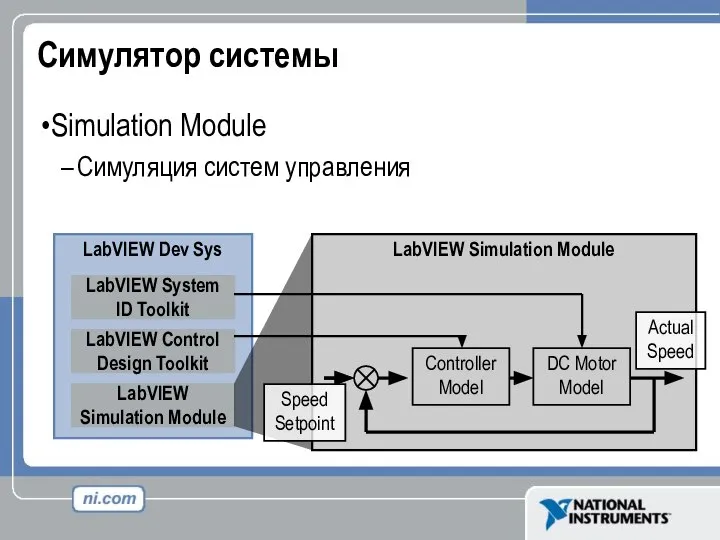
Симулятор системы
Simulation Module
Симуляция систем управления
LabVIEW Dev Sys
LabVIEW Control Design Toolkit
LabVIEW Simulation
Симулятор системы
Simulation Module
Симуляция систем управления
LabVIEW Dev Sys
LabVIEW Control Design Toolkit
LabVIEW Simulation
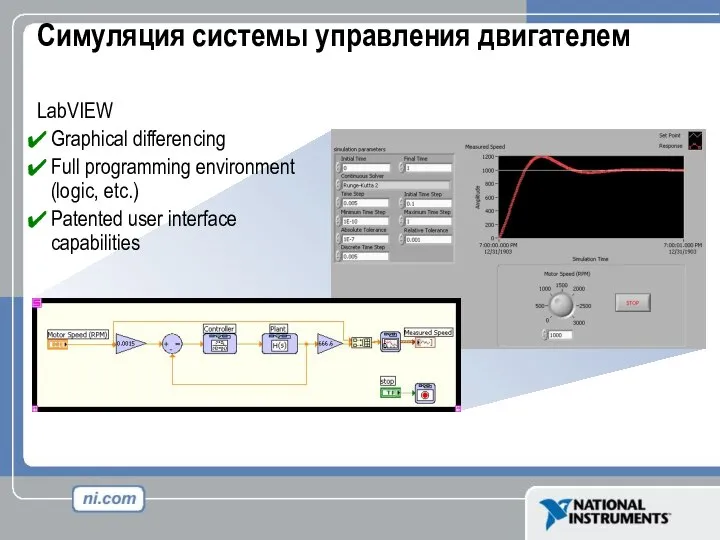
Симуляция системы управления двигателем
LabVIEW
Graphical differencing
Full programming environment (logic, etc.)
Patented user interface
Симуляция системы управления двигателем
LabVIEW
Graphical differencing
Full programming environment (logic, etc.)
Patented user interface
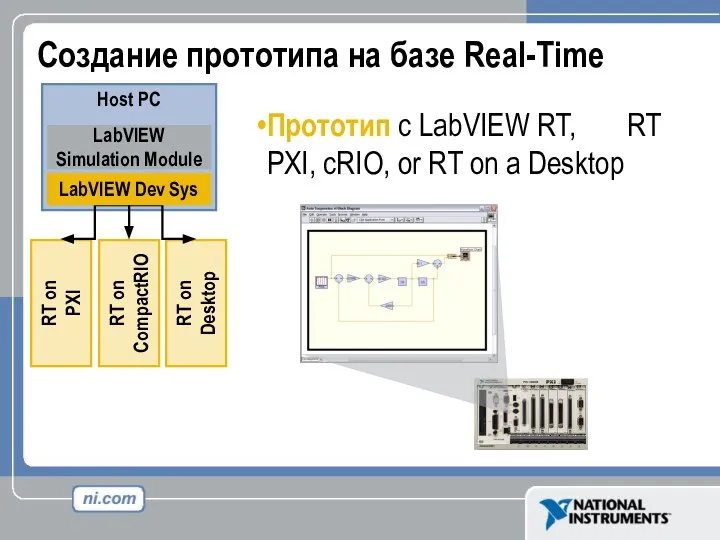
Создание прототипа на базе Real-Time
Прототип с LabVIEW RT, RT PXI, cRIO,
Создание прототипа на базе Real-Time
Прототип с LabVIEW RT, RT PXI, cRIO,
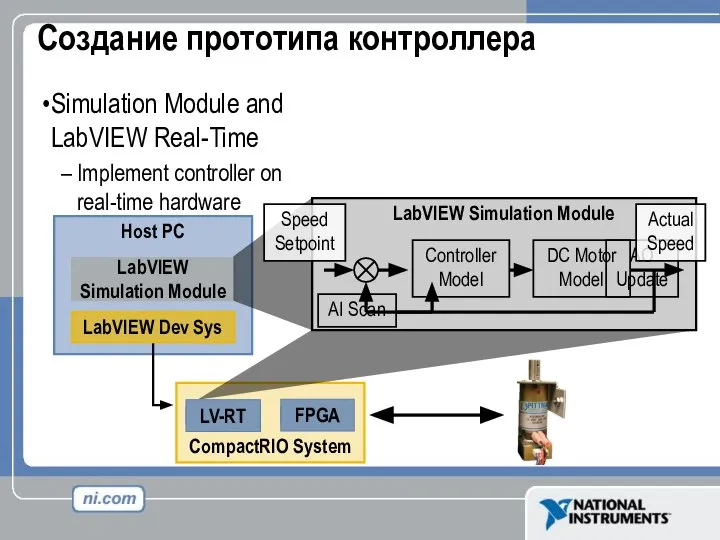
Создание прототипа контроллера
Simulation Module and LabVIEW Real-Time
Implement controller on real-time hardware
Host
Создание прототипа контроллера
Simulation Module and LabVIEW Real-Time
Implement controller on real-time hardware
Host

Бысрое создание прототипа
LabVIEW
Tight integration with real-world I/O
Seamless transition from simulation to
Бысрое создание прототипа
LabVIEW
Tight integration with real-world I/O
Seamless transition from simulation to

LabVIEW Simulation Module
Simulation Node
Linear Systems
Integrators, Derivatives, Transfer Functions
Nonlinear Systems
Friction,
LabVIEW Simulation Module
Simulation Node
Linear Systems
Integrators, Derivatives, Transfer Functions
Nonlinear Systems
Friction,
 М. Портер и его роль в развитии теории конкурентоспособности Подготовил: Безнощук Богдан, студент 4 курса, ДС-01
М. Портер и его роль в развитии теории конкурентоспособности Подготовил: Безнощук Богдан, студент 4 курса, ДС-01 The United kingdom of great Britain and northern Ireland National and ethnic groups
The United kingdom of great Britain and northern Ireland National and ethnic groups  Стандартизация основных норм взаимозаменяемости
Стандартизация основных норм взаимозаменяемости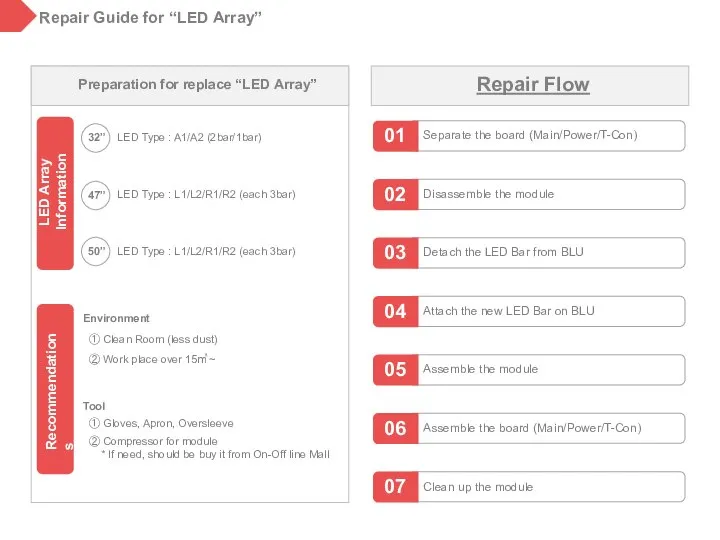 Repair guide for “Led array”
Repair guide for “Led array” Концепция учебника по алгебре и началам анализа для профильной школы
Концепция учебника по алгебре и началам анализа для профильной школы  Автоматизированное тестирование
Автоматизированное тестирование Кулинарные полуфабрикаты
Кулинарные полуфабрикаты Действия с десятичными дробями - презентация по Алгебре
Действия с десятичными дробями - презентация по Алгебре Правила оформления чертежей
Правила оформления чертежей Формула корней квадратного уравнения Журавлева Людмила Борисовна учитель математики московской гимназии № 1503
Формула корней квадратного уравнения Журавлева Людмила Борисовна учитель математики московской гимназии № 1503  Инструменты. Frontend - разработчик
Инструменты. Frontend - разработчик Введение в специальность «Экономика и управление на предприятии» Н. Н. Таскаева к. э. н., доцент А.И. Козловская, старший препо
Введение в специальность «Экономика и управление на предприятии» Н. Н. Таскаева к. э. н., доцент А.И. Козловская, старший препо Reliģiski filozofiskās domas attīstība Ķīnas kultūrā
Reliģiski filozofiskās domas attīstība Ķīnas kultūrā Контрреформы: причины и последствия Подготовила Юб 1402: штакина юлия
Контрреформы: причины и последствия Подготовила Юб 1402: штакина юлия  Орифлейм
Орифлейм Мағжан Жумабаева
Мағжан Жумабаева Решение квадратных уравнений по формуле - презентация по Алгебре
Решение квадратных уравнений по формуле - презентация по Алгебре Списки в языке Пролог
Списки в языке Пролог Государственная программа развития образования Республики Казахстан на 2011 – 2020 годы
Государственная программа развития образования Республики Казахстан на 2011 – 2020 годы  Презентация Авиационная промышленность. Рынок гражданской авиации. Конспект статьи
Презентация Авиационная промышленность. Рынок гражданской авиации. Конспект статьи  Технология построения экспозиции школьного музея
Технология построения экспозиции школьного музея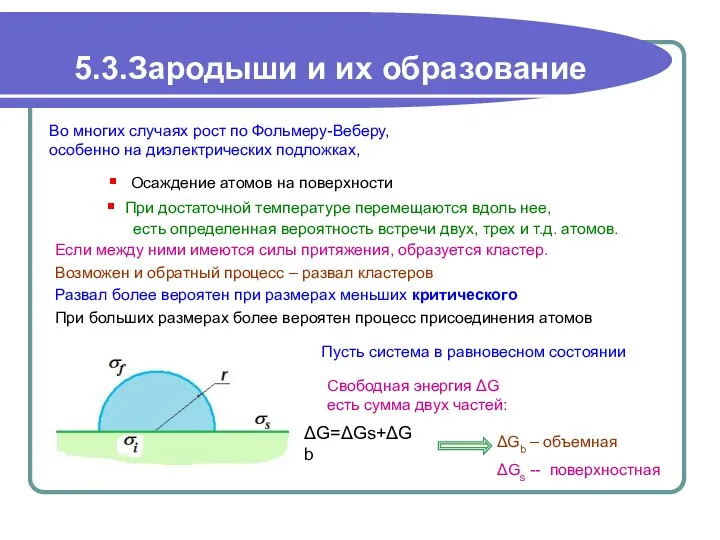 Зародыши и их образование
Зародыши и их образование Звезды: спектральная классификация, классы светимости, диаграмма Герцшпрунга-Рессела
Звезды: спектральная классификация, классы светимости, диаграмма Герцшпрунга-Рессела Требования по выкладке молочных, молочных составных и молокосодержащих продуктов. Правила маркировки табачной продукции
Требования по выкладке молочных, молочных составных и молокосодержащих продуктов. Правила маркировки табачной продукции Культура манси
Культура манси Школа молодого политика "Лидер"
Школа молодого политика "Лидер" Дифференциальные уравнения
Дифференциальные уравнения Asus repair. Audio. (Lesson 3)
Asus repair. Audio. (Lesson 3)