- Обработка радиолокационной информации в автономных мобильных наземных объектах

Содержание
- 2. На этапе первичной обработки происходит обнаружение отдельных сигналов и определение их характеристик, а также погрешностей. На
- 3. Цели и задачи НИР Целью работы является создание ПО блока вторичной обработки, применимого в реальной обстановке.
- 4. Применение радиолокационного датчика обнаружение и определение параметров относительного движения множества подвижных и неподвижных объектов информационное обеспечение
- 5. Выбор метода для каждого конкретного случая представляет собо компромисс между вычислительной точностью и ресурсозатратностью
- 6. Сопровождение в неподвижной СК Сопровождение в подвижной СК Смешанный вариант Задача сопровождения целей
- 7. Структура алгоритмического обеспечения вторичной обработки 1 – алгоритм предварительной классификации входных измерений; 2, 5 – алгоритмы
- 8. Смысловая схема деления работы Ради сохранения быстродействия было решено использовать С++ в качестве внешнего блока симуляции,
- 9. Структура классов
- 11. Скачать презентацию
На этапе первичной обработки происходит обнаружение отдельных сигналов и определение их
На этапе первичной обработки происходит обнаружение отдельных сигналов и определение их
Цели и задачи НИР
Целью работы является создание ПО блока вторичной обработки,
Цели и задачи НИР
Целью работы является создание ПО блока вторичной обработки,
Применение радиолокационного датчика
обнаружение и определение параметров относительного движения множества подвижных и
Применение радиолокационного датчика
обнаружение и определение параметров относительного движения множества подвижных и
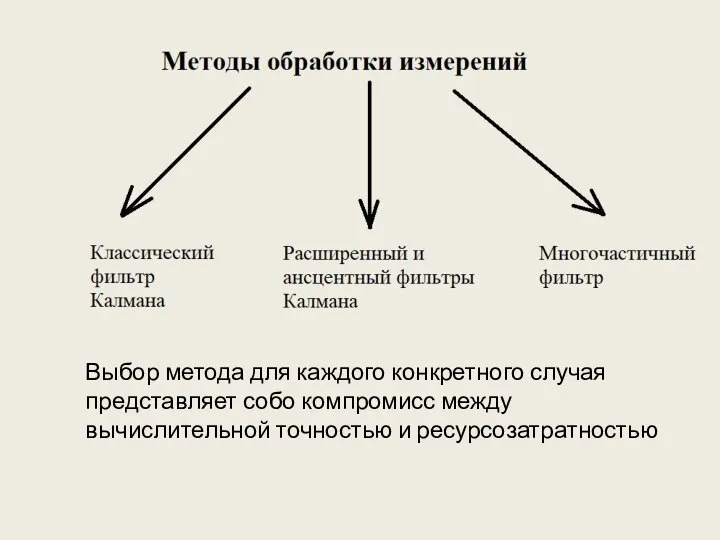
Выбор метода для каждого конкретного случая представляет собо компромисс между вычислительной
Выбор метода для каждого конкретного случая представляет собо компромисс между вычислительной
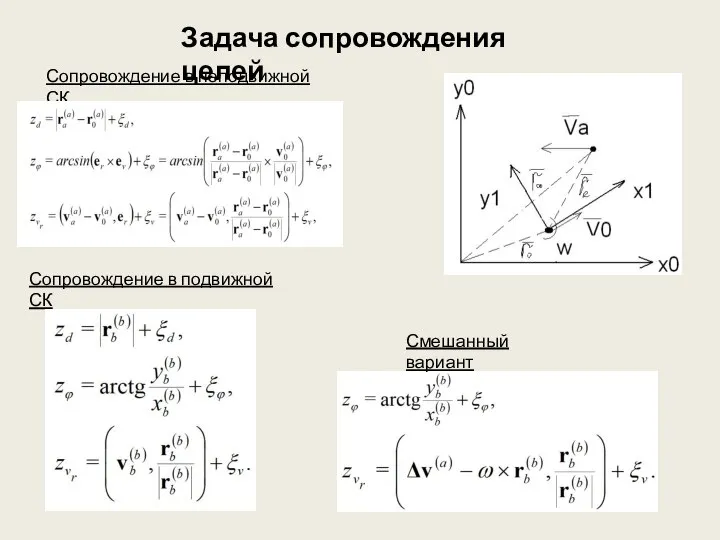
Сопровождение в неподвижной СК
Сопровождение в подвижной СК
Смешанный вариант
Задача сопровождения целей
Сопровождение в неподвижной СК
Сопровождение в подвижной СК
Смешанный вариант
Задача сопровождения целей
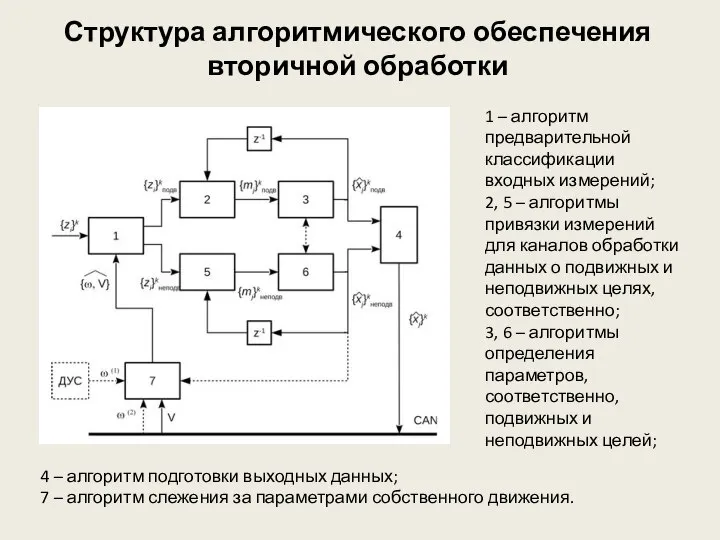
Структура алгоритмического обеспечения вторичной обработки
1 – алгоритм предварительной классификации входных измерений;
2,
Структура алгоритмического обеспечения вторичной обработки
1 – алгоритм предварительной классификации входных измерений;
2,
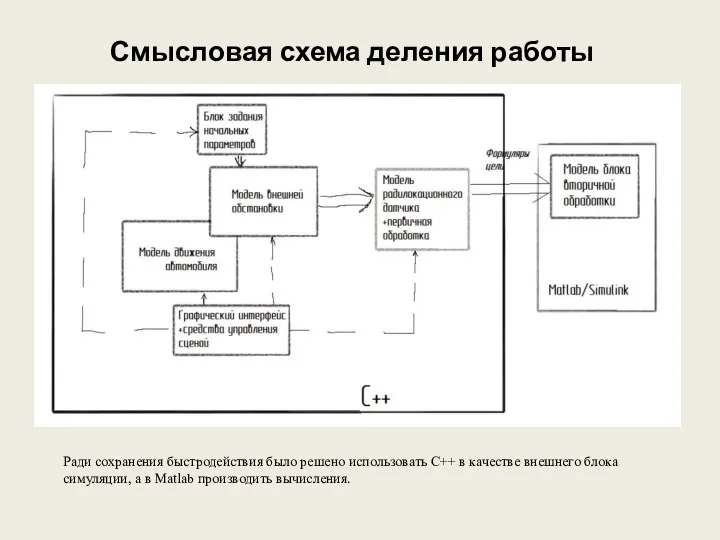
Смысловая схема деления работы
Ради сохранения быстродействия было решено использовать С++ в
Смысловая схема деления работы
Ради сохранения быстродействия было решено использовать С++ в
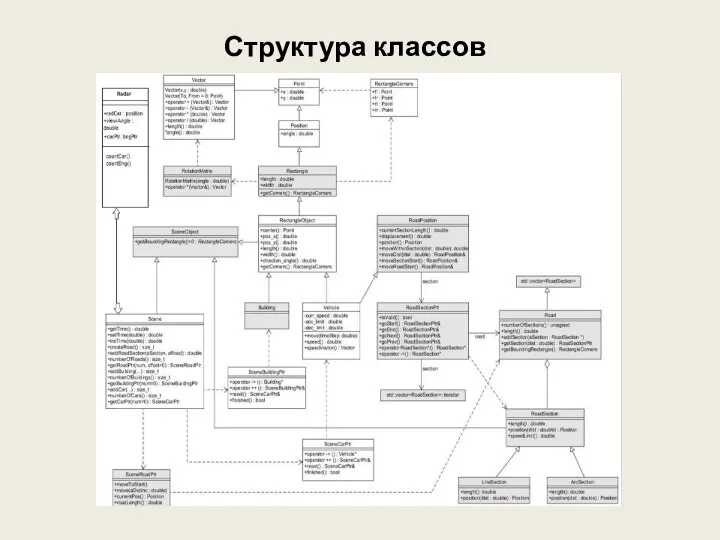
Структура классов
Структура классов
 СРОКИ ПРИЕМА НА РАБОТУ СОТРУДНИКОВ, ПРИВЛЕКАЕМЫХ ДЛЯ ВЫПОЛНЕНИЯ ПРОЕКТОВ ПО ПРОГРАММЕ ФИ В 2012 ГОДУ 01 февраля 2012 г. – 31 декабря 2
СРОКИ ПРИЕМА НА РАБОТУ СОТРУДНИКОВ, ПРИВЛЕКАЕМЫХ ДЛЯ ВЫПОЛНЕНИЯ ПРОЕКТОВ ПО ПРОГРАММЕ ФИ В 2012 ГОДУ 01 февраля 2012 г. – 31 декабря 2 Открытая правовая школа при факультете права НИУ ВШЭ: адвокатура, нотариат, чоп, частные детективы. Тема 6
Открытая правовая школа при факультете права НИУ ВШЭ: адвокатура, нотариат, чоп, частные детективы. Тема 6 Естественно научные основы психологии
Естественно научные основы психологии Презентация на тему ЧЕМ ОТЛИЧАЮТСЯ СТАНДАРТЫ ПЕРВОГО И ВТОРОГО ПОКОЛЕНИЯ
Презентация на тему ЧЕМ ОТЛИЧАЮТСЯ СТАНДАРТЫ ПЕРВОГО И ВТОРОГО ПОКОЛЕНИЯ Аудитория Уанета февраль 2009 gemiusAudience
Аудитория Уанета февраль 2009 gemiusAudience Заповедные места Архангельской области
Заповедные места Архангельской области Философия Чаадаева как исток диалога западников и славянофилов. Подготовили: Студенты I курса ФТД группы Тс 02/1407 Батькова Анна А
Философия Чаадаева как исток диалога западников и славянофилов. Подготовили: Студенты I курса ФТД группы Тс 02/1407 Батькова Анна А Наноэлектроника. (Практическое занятие 13)
Наноэлектроника. (Практическое занятие 13) КОНТРОЛЬНАЯ РАБОТА ПО ТЕОРЕТИКО-ПРАВОВЫМ ДИСЦИПЛИНАМ
КОНТРОЛЬНАЯ РАБОТА ПО ТЕОРЕТИКО-ПРАВОВЫМ ДИСЦИПЛИНАМ  Олимпиада 1980
Олимпиада 1980 Ислам - миролюбивая религия
Ислам - миролюбивая религия Guten Tag, wie geht‘s
Guten Tag, wie geht‘s Даниил Иванович Хармс
Даниил Иванович Хармс Зелёное строительство
Зелёное строительство Космодемьянская Зоя Анатольевна
Космодемьянская Зоя Анатольевна Изменение остойчивости и посадки судна при погрузке и выгрузке
Изменение остойчивости и посадки судна при погрузке и выгрузке Здоровьесберегающие технологии на уроках физкультуры
Здоровьесберегающие технологии на уроках физкультуры Презентация Правовое регулирование использования и охраны вод
Презентация Правовое регулирование использования и охраны вод  Портал об информационной безопасности и программировании
Портал об информационной безопасности и программировании Коррекция техники выполнения прыжков у могулистов
Коррекция техники выполнения прыжков у могулистов Инженерная графика. Введение
Инженерная графика. Введение Макроэкономическая нестабильность Вопросы 1.НЕРАВНОМЕРНОСТЬ ЭКОНОМИЧЕСКОГО РОСТА 2 БЕЗРАБОТИЦА И ЕЁ ТИПЫ 3 ИЗМЕРЕНИЕ И ПОС
Макроэкономическая нестабильность Вопросы 1.НЕРАВНОМЕРНОСТЬ ЭКОНОМИЧЕСКОГО РОСТА 2 БЕЗРАБОТИЦА И ЕЁ ТИПЫ 3 ИЗМЕРЕНИЕ И ПОС Классификация деловой документации
Классификация деловой документации Основные понятия и определения. Структурный анализ механизмов
Основные понятия и определения. Структурный анализ механизмов Устройство и принцип работы крана вспомогательного тормоза 254
Устройство и принцип работы крана вспомогательного тормоза 254 Qu’est-ce que c’est
Qu’est-ce que c’est Турбодвигатель TSI
Турбодвигатель TSI Временная татуировка
Временная татуировка