- ОБЩИЕ ПРИНЦИПЫ УПРАВЛЕНИЯ

Содержание
- 3. СОДЕРЖАНИЕ Введение. 1. Фундаментальные принципы управления. Система управления. Принципы управления. Виды систем управления. 2. Статические характеристики
- 4. ВВЕДЕНИЕ Управление каким-либо объектом или процессом есть целенаправленное воздействие на него в целях установления требуемых состояний
- 5. ФУНДАМЕНТАЛЬНЫЕ ПРИНЦИПЫ УПРАВЛЕНИЯ Система управления состоит из двух основных частей: объекта управления (ОУ) и устройства управления
- 6. Принципы управления. Различают три фундаментальных принципа управления состоянием ОУ: принцип разомкнутого управления, принцип компенсации, принцип обратной
- 7. Виды систем управления. В зависимости от принципа и закона функционирования управляющего устройства различают основные виды систем:
- 8. Следящие системы отличаются от программных лишь тем, что программа y = f(t) или y = f(x)
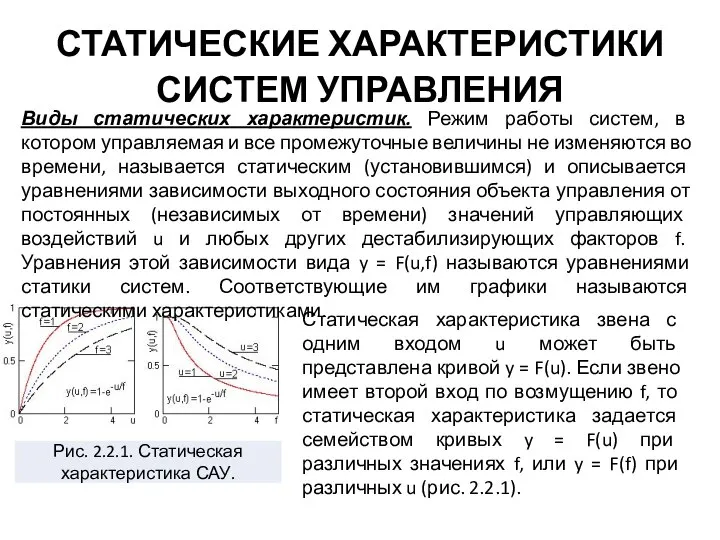
- 9. СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМ УПРАВЛЕНИЯ Виды статических характеристик. Режим работы систем, в котором управляемая и все промежуточные
- 10. Статическое и астатическое регулирование. Если на управляемый процесс действует возмущение (дестабилизирующий фактор) f, то значение имеет
- 11. Статические регуляторы работают при обязательном отклонении e регулируемой величины y от требуемого значения у0. Это отклонение
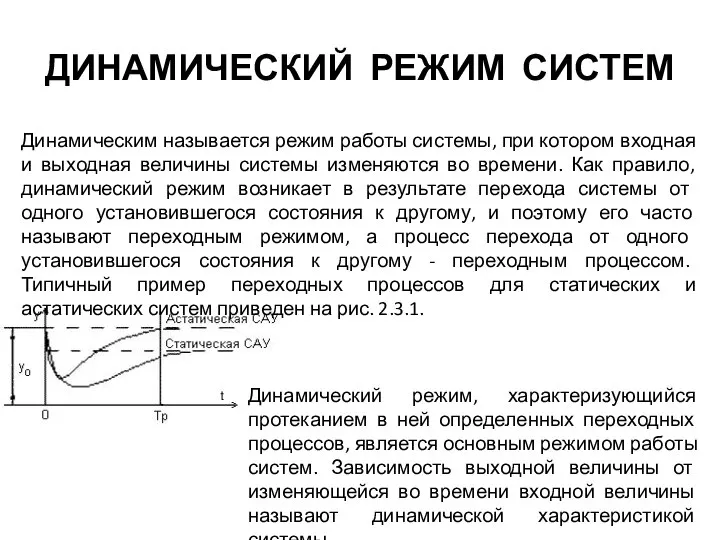
- 12. ДИНАМИЧЕСКИЙ РЕЖИМ СИСТЕМ Динамическим называется режим работы системы, при котором входная и выходная величины системы изменяются
- 13. Все динамические характеристики можно разделить на две группы. К первой группе относятся зависимости выходной величины системы
- 14. Допустим, система находится в установившемся режиме, и имеет значение выходной величины y = y0. Пусть в
- 15. Оценки переходных характеристик производятся с помощью следующих показателей: ∎ Характер временной зависимости. По характеру зависимости переходные
- 16. Импульсная характеристика является другой не менее распространенной временной характеристикой системы. Её называют импульсной переходной характеристикой или
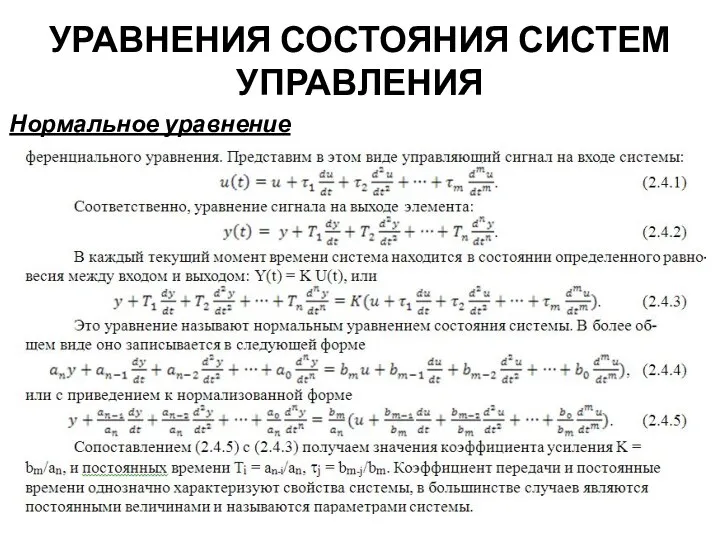
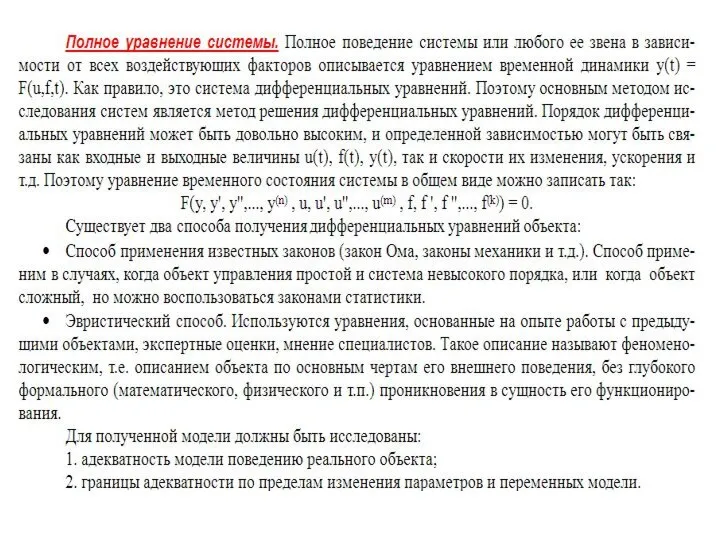
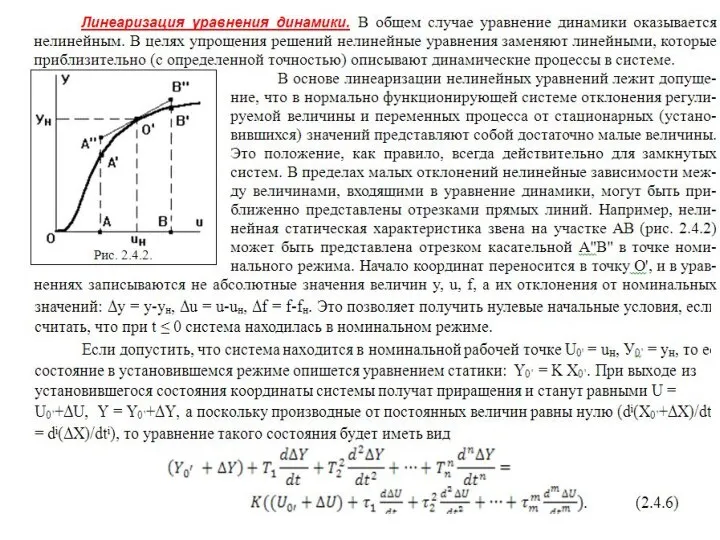
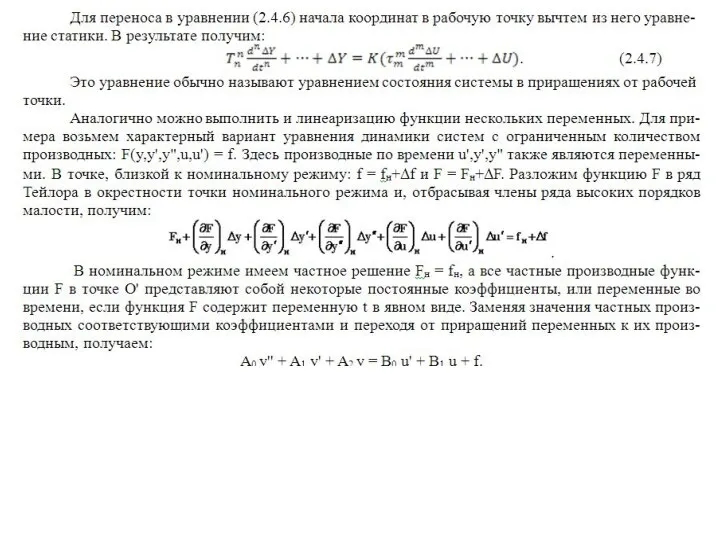
- 17. УРАВНЕНИЯ СОСТОЯНИЯ СИСТЕМ УПРАВЛЕНИЯ Нормальное уравнение состояния
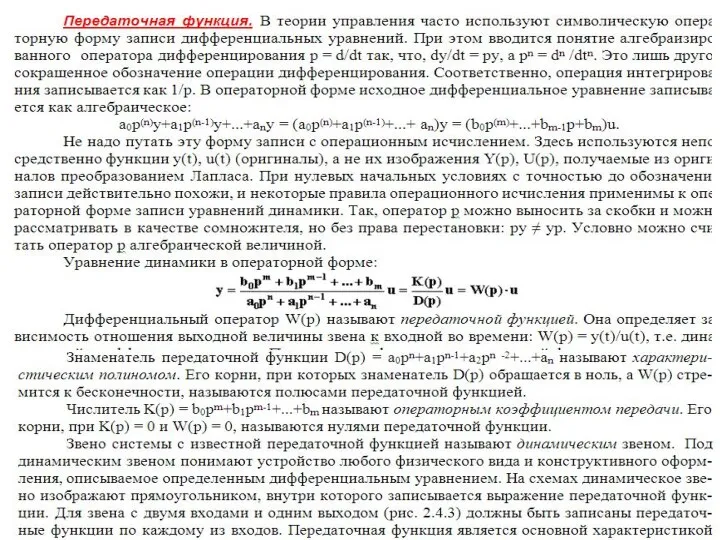
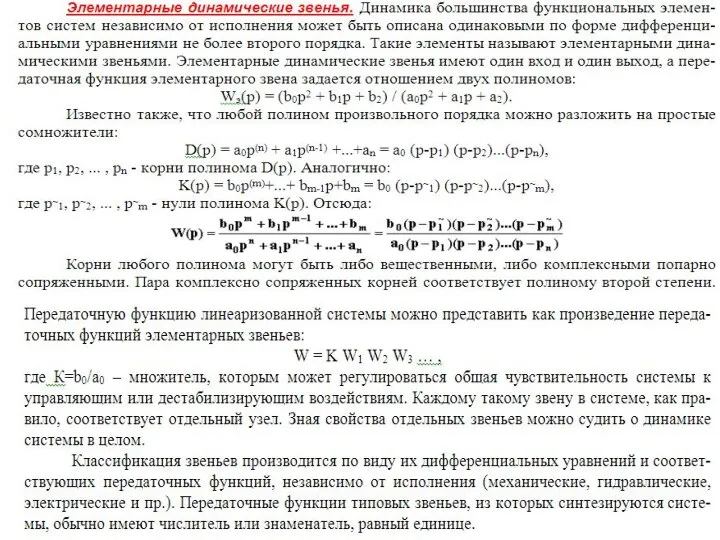
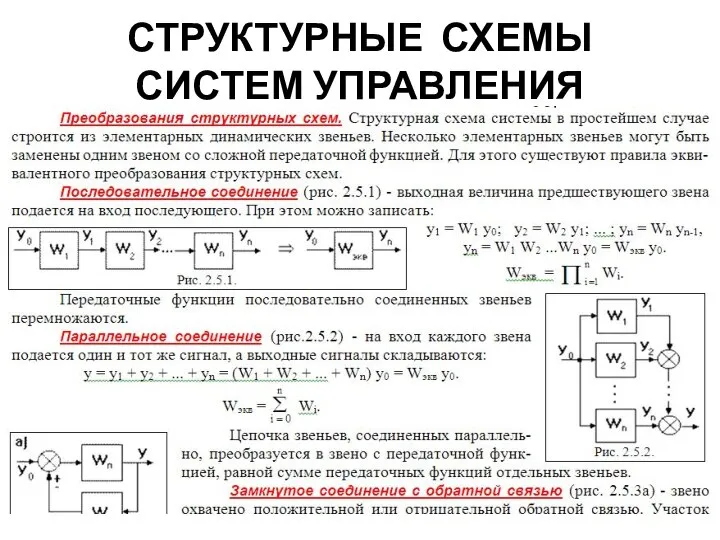
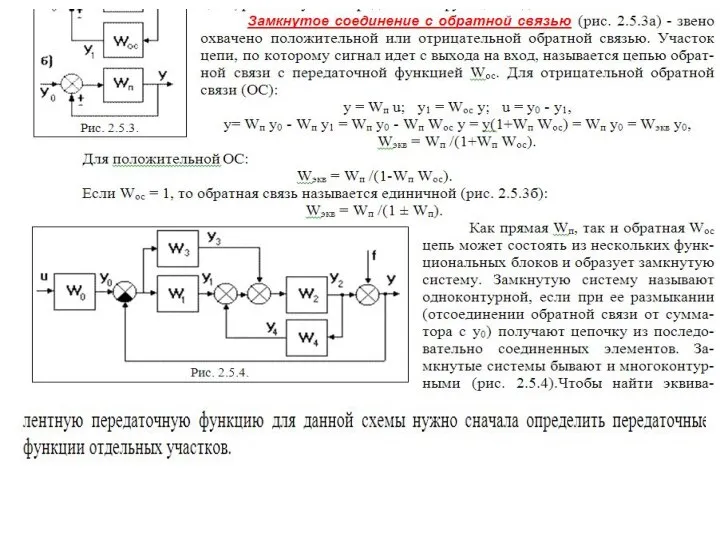
- 24. СТРУКТУРНЫЕ СХЕМЫ СИСТЕМ УПРАВЛЕНИЯ
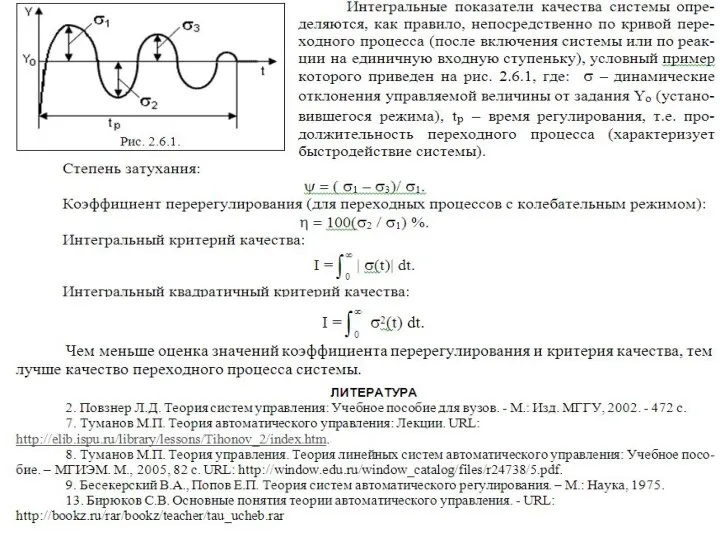
- 26. УСТОЙЧИВОСТЬ И КАЧЕСТВО СИСТЕМ УПРАВЛЕНИЯ
- 30. Проектирование регулятора для линейной системы (краткие теоретические сведения)
- 32. Скачать презентацию
СОДЕРЖАНИЕ
Введение.
1. Фундаментальные принципы управления. Система управления. Принципы управления. Виды систем
СОДЕРЖАНИЕ
Введение.
1. Фундаментальные принципы управления. Система управления. Принципы управления. Виды систем
ВВЕДЕНИЕ
Управление каким-либо объектом или процессом есть целенаправленное воздействие на него
ВВЕДЕНИЕ
Управление каким-либо объектом или процессом есть целенаправленное воздействие на него
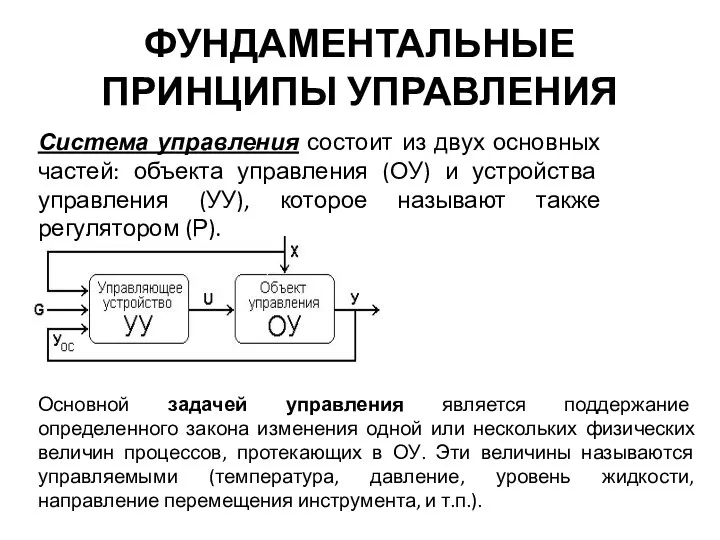
ФУНДАМЕНТАЛЬНЫЕ ПРИНЦИПЫ УПРАВЛЕНИЯ
Система управления состоит из двух основных частей: объекта
ФУНДАМЕНТАЛЬНЫЕ ПРИНЦИПЫ УПРАВЛЕНИЯ
Система управления состоит из двух основных частей: объекта
Принципы управления.
Различают три фундаментальных принципа управления состоянием ОУ: принцип разомкнутого
Принципы управления.
Различают три фундаментальных принципа управления состоянием ОУ: принцип разомкнутого
Виды систем управления.
В зависимости от принципа и закона функционирования управляющего
Виды систем управления.
В зависимости от принципа и закона функционирования управляющего
Следящие системы отличаются от программных лишь тем, что программа y =
Следящие системы отличаются от программных лишь тем, что программа y =
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМ УПРАВЛЕНИЯ
Виды статических характеристик. Режим работы систем, в
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМ УПРАВЛЕНИЯ
Виды статических характеристик. Режим работы систем, в
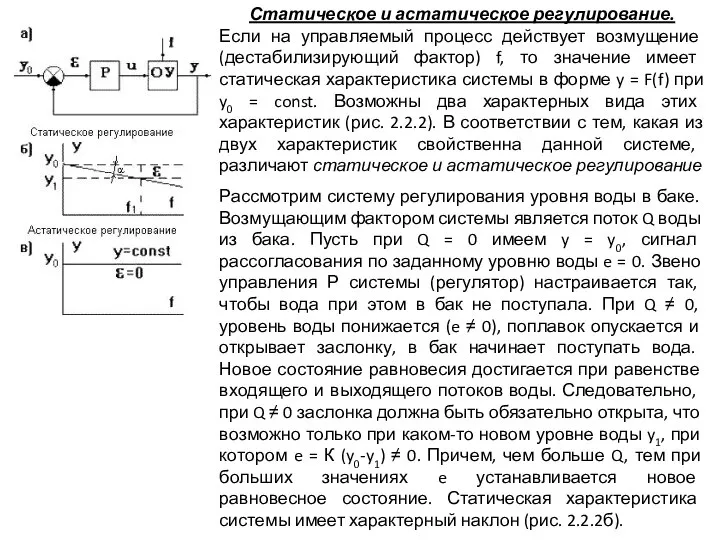
Статическое и астатическое регулирование.
Если на управляемый процесс действует возмущение (дестабилизирующий
Статическое и астатическое регулирование.
Если на управляемый процесс действует возмущение (дестабилизирующий
Статические регуляторы работают при обязательном отклонении e регулируемой величины y от
Статические регуляторы работают при обязательном отклонении e регулируемой величины y от
ДИНАМИЧЕСКИЙ РЕЖИМ СИСТЕМ
Динамическим называется режим работы системы, при котором входная
ДИНАМИЧЕСКИЙ РЕЖИМ СИСТЕМ
Динамическим называется режим работы системы, при котором входная
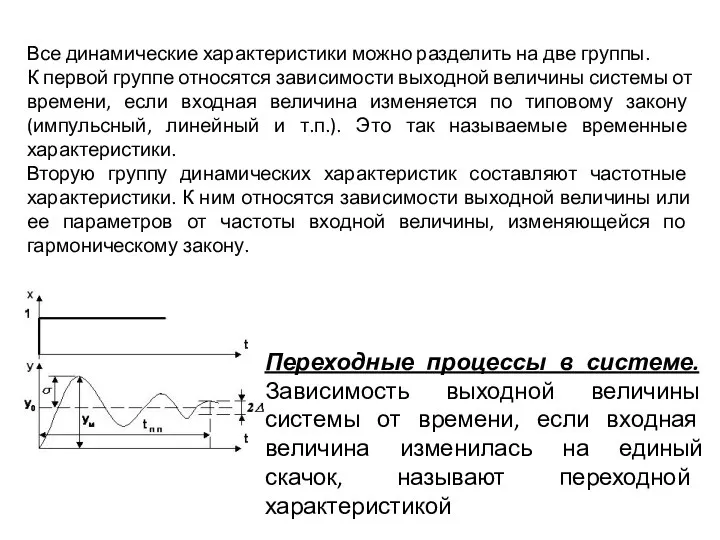
Все динамические характеристики можно разделить на две группы.
К первой группе
Все динамические характеристики можно разделить на две группы.
К первой группе
Допустим, система находится в установившемся режиме, и имеет значение выходной величины
Допустим, система находится в установившемся режиме, и имеет значение выходной величины
Оценки переходных характеристик производятся с помощью следующих показателей:
∎ Характер временной
Оценки переходных характеристик производятся с помощью следующих показателей:
∎ Характер временной
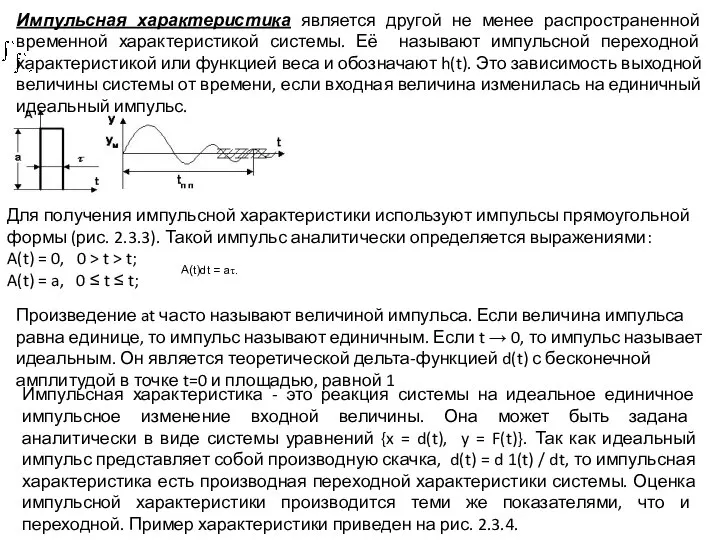
Импульсная характеристика является другой не менее распространенной временной характеристикой системы. Её
Импульсная характеристика является другой не менее распространенной временной характеристикой системы. Её
УРАВНЕНИЯ СОСТОЯНИЯ СИСТЕМ УПРАВЛЕНИЯ
Нормальное уравнение состояния
УРАВНЕНИЯ СОСТОЯНИЯ СИСТЕМ УПРАВЛЕНИЯ
Нормальное уравнение состояния
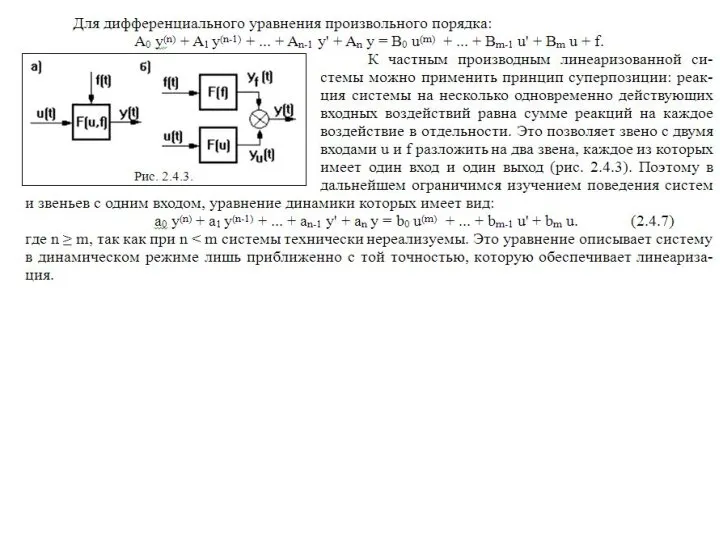
СТРУКТУРНЫЕ СХЕМЫ СИСТЕМ УПРАВЛЕНИЯ
СТРУКТУРНЫЕ СХЕМЫ СИСТЕМ УПРАВЛЕНИЯ
УСТОЙЧИВОСТЬ И КАЧЕСТВО СИСТЕМ УПРАВЛЕНИЯ
УСТОЙЧИВОСТЬ И КАЧЕСТВО СИСТЕМ УПРАВЛЕНИЯ
Проектирование регулятора для линейной системы
(краткие теоретические сведения)
Проектирование регулятора для линейной системы
(краткие теоретические сведения)
 О жизни и чудесах блаженной Матроны (1885-1952)
О жизни и чудесах блаженной Матроны (1885-1952) СОЗДАНИЕ ПЛАТФОРМЫ для ИНТЕРНЕТ МАГАЗИНА
СОЗДАНИЕ ПЛАТФОРМЫ для ИНТЕРНЕТ МАГАЗИНА Презентация "Стилевое многообразие искусства XVII-XVIII веков" - скачать презентации по МХК
Презентация "Стилевое многообразие искусства XVII-XVIII веков" - скачать презентации по МХК .01.2017 НТР и мировое хозяйство
.01.2017 НТР и мировое хозяйство Люди, животные, растения и минералы
Люди, животные, растения и минералы Предельные теоремы вероятностей
Предельные теоремы вероятностей  Communication ethics across cultural differences. Лекция 1
Communication ethics across cultural differences. Лекция 1 ОРГАНИЗАЦИЯ СПЕЦИАЛЬНЫХ СОБЫТИЙ: Церемонии открытия Приемы
ОРГАНИЗАЦИЯ СПЕЦИАЛЬНЫХ СОБЫТИЙ: Церемонии открытия Приемы  Владимир Владимирович Путин
Владимир Владимирович Путин Қостанай қаласындағы физика-математикалық бағытындағы
Қостанай қаласындағы физика-математикалық бағытындағы Изучение машин и оборудования для организации рельефа и производства дорожных работ
Изучение машин и оборудования для организации рельефа и производства дорожных работ Виды графики Учитель ИЗО МОУ лицей №5 города Зарайск Московской областии Ильина Т. Е.
Виды графики Учитель ИЗО МОУ лицей №5 города Зарайск Московской областии Ильина Т. Е. ТАМОЖЕННО-ТАРИФНОЕ РЕГУЛИРОВАНИЕ В ОБЕСПЕЧЕНИИ ЭКОНОМИЧЕСКОЙ БЕЗОПАСНОСТИ РОССИИ Выполнили студентки 2-го руса ФТД группы
ТАМОЖЕННО-ТАРИФНОЕ РЕГУЛИРОВАНИЕ В ОБЕСПЕЧЕНИИ ЭКОНОМИЧЕСКОЙ БЕЗОПАСНОСТИ РОССИИ Выполнили студентки 2-го руса ФТД группы  Спортивная метрология, как учебная дисциплина. Основы теории спортивных измерений
Спортивная метрология, как учебная дисциплина. Основы теории спортивных измерений Балансовый метод и сферы его применения в стратегическом государственном управлении
Балансовый метод и сферы его применения в стратегическом государственном управлении История христианство в Истории России
История христианство в Истории России Сечения. Назначение и выбор
Сечения. Назначение и выбор  Средства радиоэлектронной борьбы
Средства радиоэлектронной борьбы  Разработка документов транспортного планирования для территории муниципального образования город Краснодар
Разработка документов транспортного планирования для территории муниципального образования город Краснодар WSDL - Web Services Description Language
WSDL - Web Services Description Language Политический процесс
Политический процесс Серафим Саровский
Серафим Саровский ПРАВООХРАНИТЕЛЬНАЯ ДЕЯТЕЛЬНОСТЬ ТАМОЖЕННЫХ ОРГАНОВ РОССИИ НА СОВРЕМЕННОМ ЭТАПЕ.
ПРАВООХРАНИТЕЛЬНАЯ ДЕЯТЕЛЬНОСТЬ ТАМОЖЕННЫХ ОРГАНОВ РОССИИ НА СОВРЕМЕННОМ ЭТАПЕ. Современное состояние употребления ПАВ и распространения ВИЧ/СПИДа в Иркутской области
Современное состояние употребления ПАВ и распространения ВИЧ/СПИДа в Иркутской области Основные виды помех средствам активной радиолокации
Основные виды помех средствам активной радиолокации Перпендикулярные плоскости
Перпендикулярные плоскости  Организация методической работы с педагогами в целях повышения качества обучения. К выступлению за заседании педагогического со
Организация методической работы с педагогами в целях повышения качества обучения. К выступлению за заседании педагогического со Политическая модернизация и трансформация в странах Центральной и Восточной Европы
Политическая модернизация и трансформация в странах Центральной и Восточной Европы