- СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ

Содержание
- 2. Тема 3. СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
- 4. СТРУКТУРА И ФУНКЦИОНАЛЬНЫЕ КОМПОНЕНТЫ САУ
- 16. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА УПРАВЛЕНИЯ
- 17. Система линейных уравнений объекта. В общем случае модель одноканального объекта
- 23. Типовые входные воздействия. Для оценки динамических свойств системы и отдельных звеньев принято исследовать их реакцию на
- 25. ВРЕМЕННЫЕ ХАРАКТЕРИСТИКИ САУ
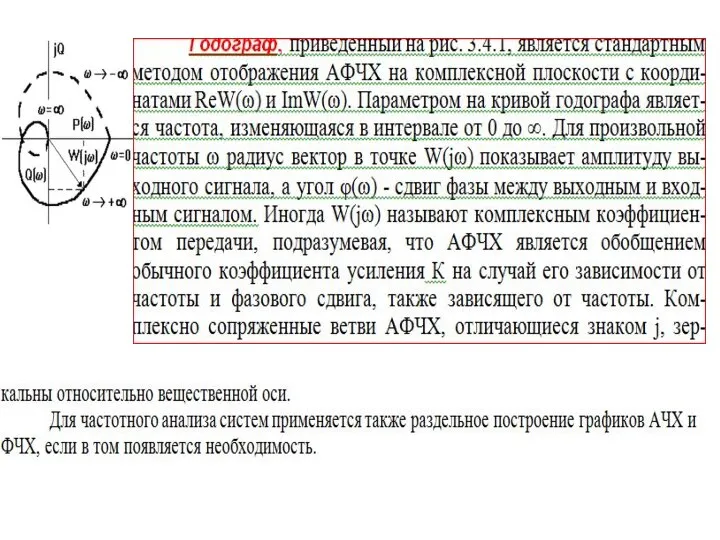
- 27. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ САУ
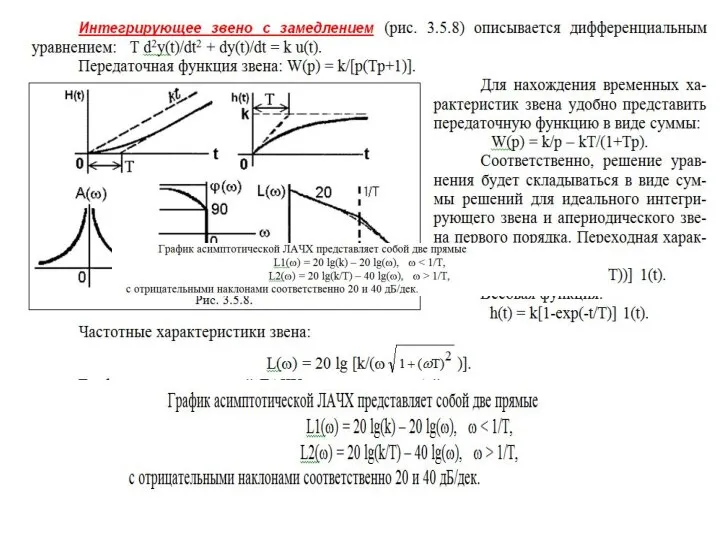
- 30. ХАРАКТЕРИСТИКИ ЭЛЕМЕНТАРНЫХ ЗВЕНЬЕВ СИСТЕМ
- 39. чистое дифференцирование W(p) = p. чистое дифференцирование W(p) = p.
- 46. ПОСТРОЕНИЕ МОДЕЛЕЙ ВХОД-ВЫХОД
- 50. Лабораторная работа № 3 Моделирование системы стабилизации судна на курсе в пакете Simulink (краткие теоретические сведения)
- 51. ЛИТЕРАТУРА 1. Мирошник И.В. Теория автоматического управления. Линейные системы: Учебное пособие для вузов. - СПб.: Питер,
- 53. Скачать презентацию
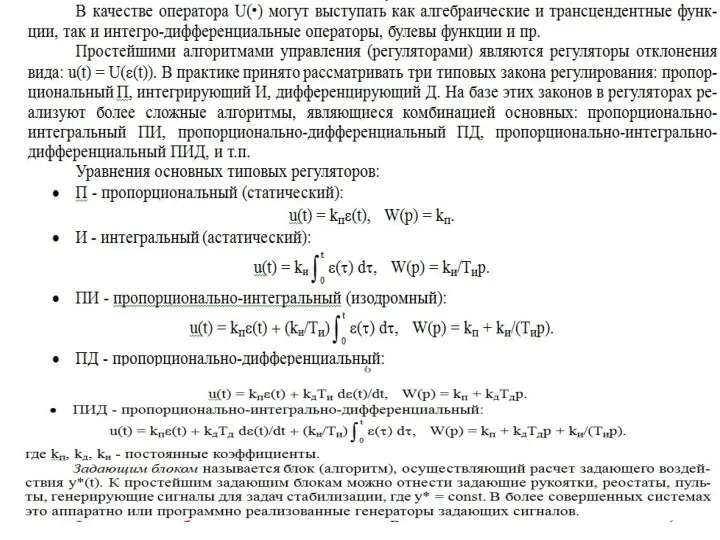
Тема 3. СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Тема 3. СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
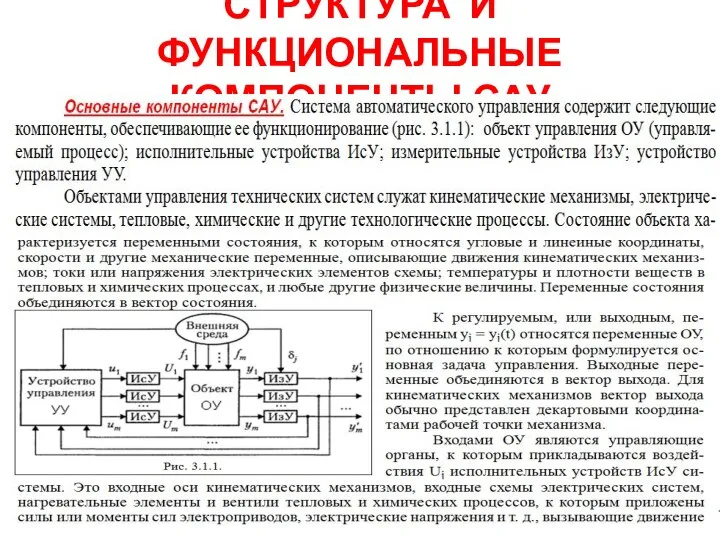
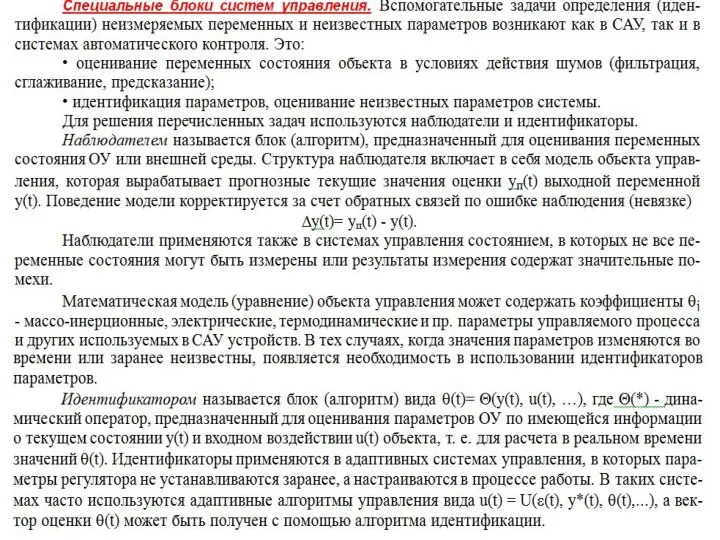
СТРУКТУРА И ФУНКЦИОНАЛЬНЫЕ КОМПОНЕНТЫ САУ
СТРУКТУРА И ФУНКЦИОНАЛЬНЫЕ КОМПОНЕНТЫ САУ
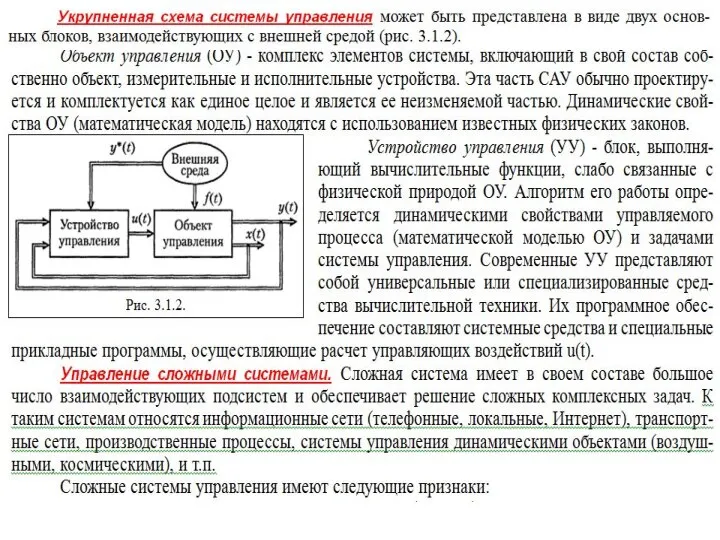
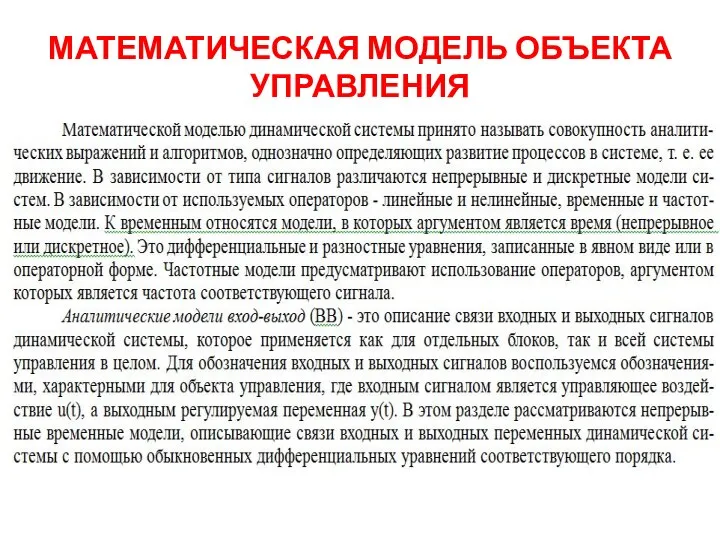
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА УПРАВЛЕНИЯ
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА УПРАВЛЕНИЯ
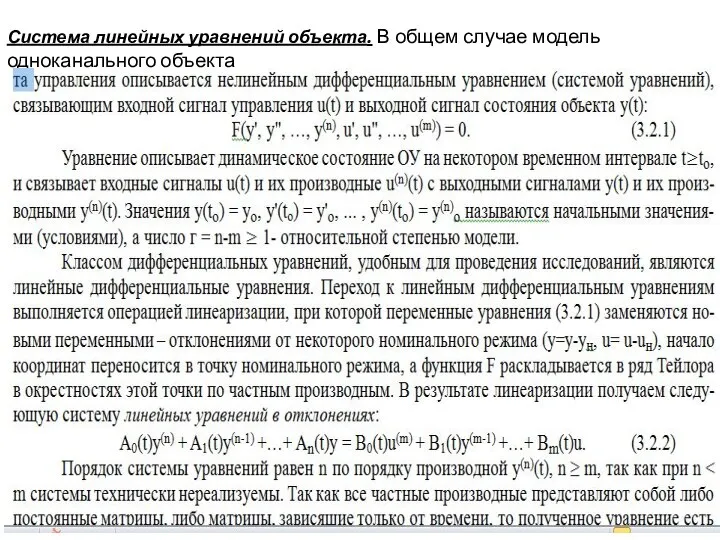
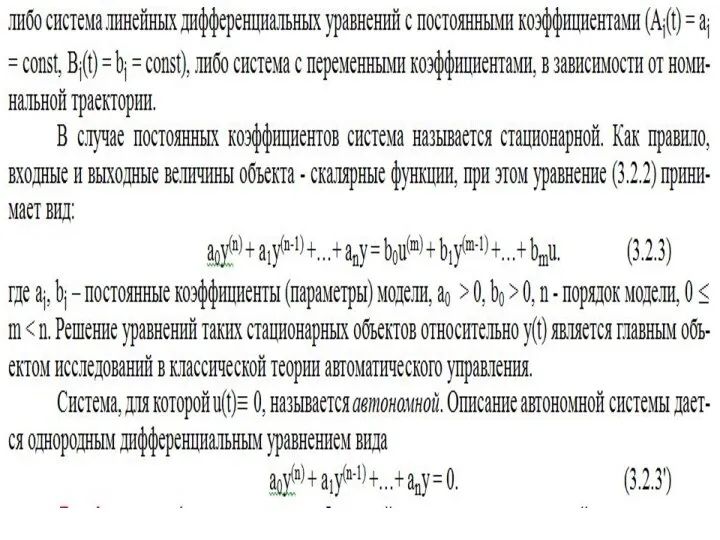
Система линейных уравнений объекта. В общем случае модель одноканального объекта
Система линейных уравнений объекта. В общем случае модель одноканального объекта
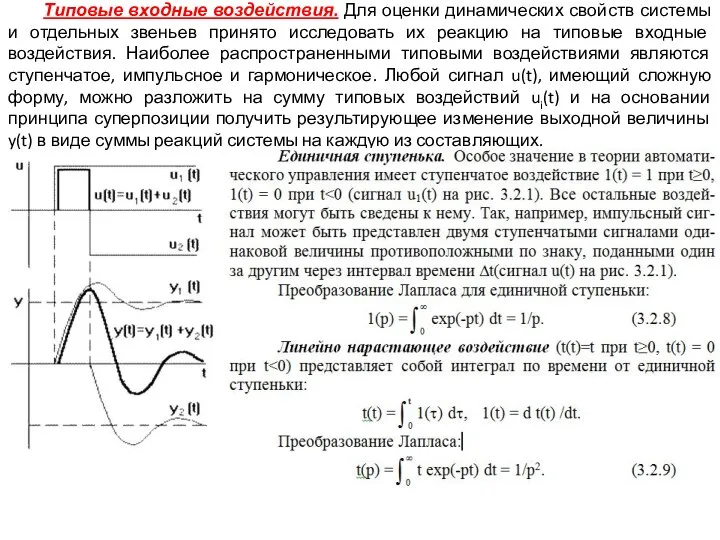
Типовые входные воздействия. Для оценки динамических свойств системы и отдельных звеньев
Типовые входные воздействия. Для оценки динамических свойств системы и отдельных звеньев
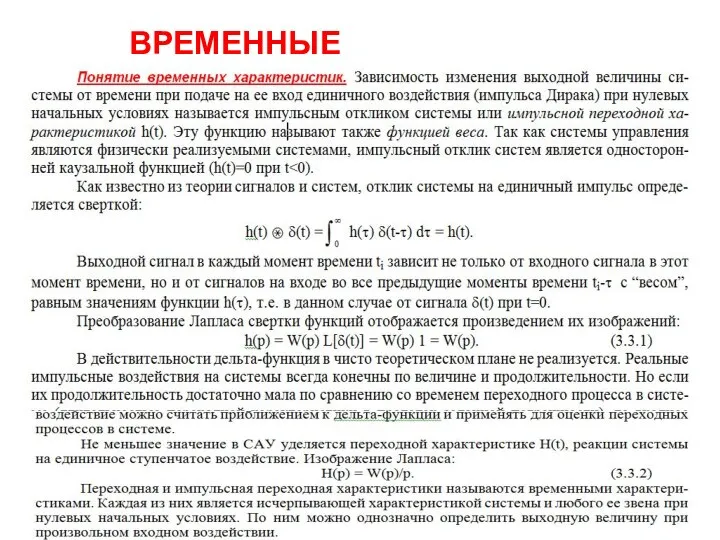
ВРЕМЕННЫЕ ХАРАКТЕРИСТИКИ САУ
ВРЕМЕННЫЕ ХАРАКТЕРИСТИКИ САУ
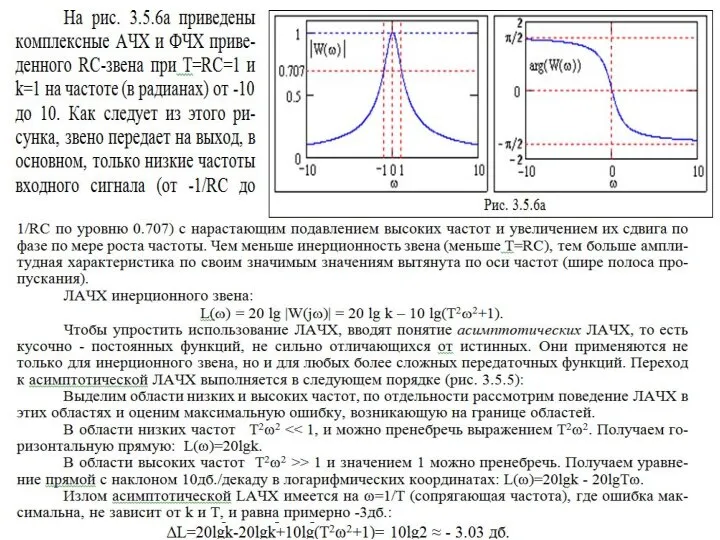
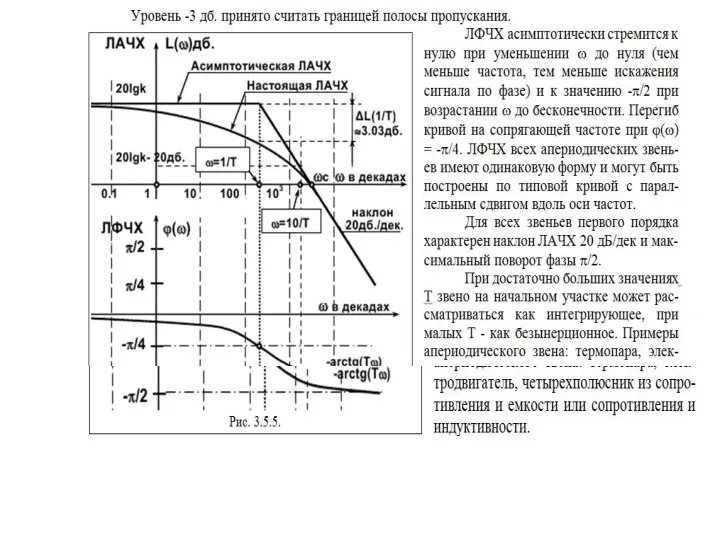
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ САУ
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ САУ
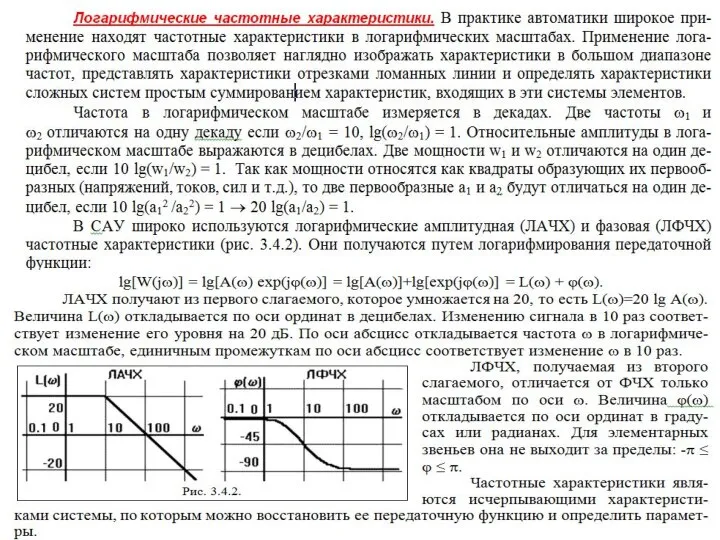
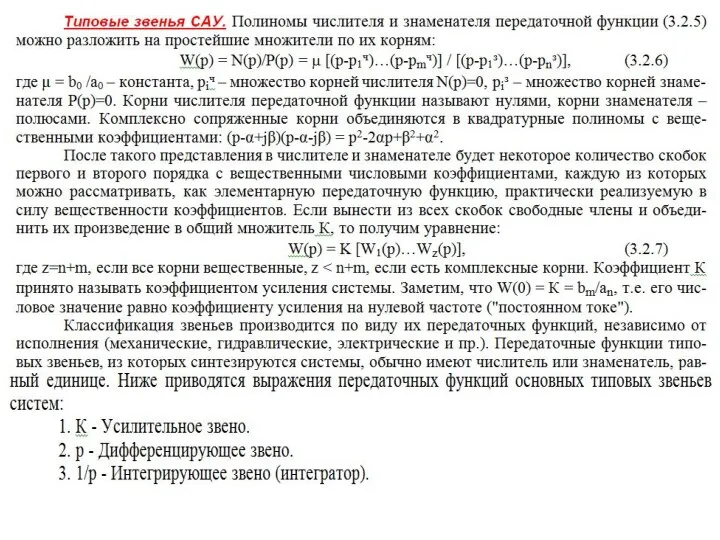
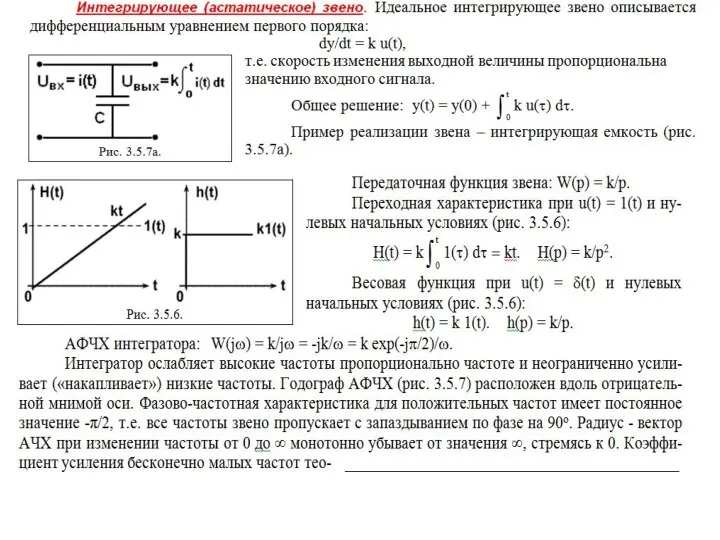
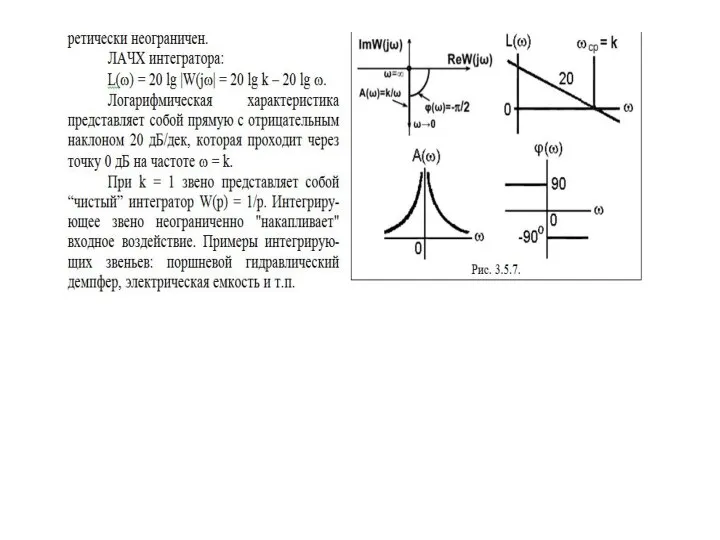
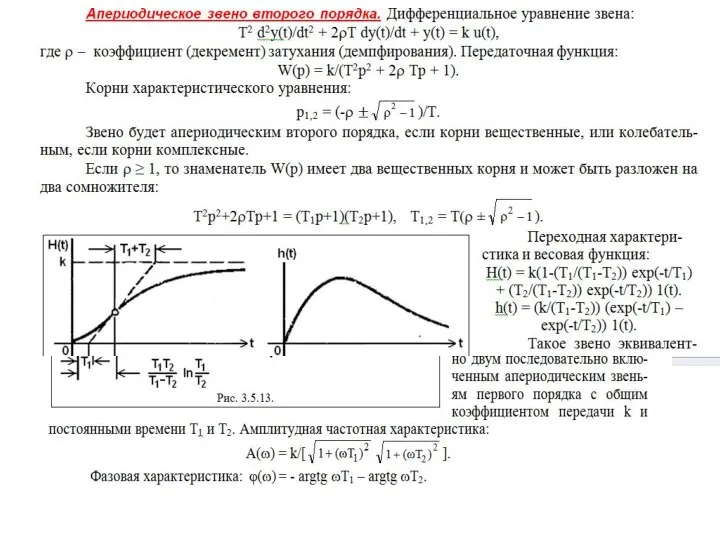
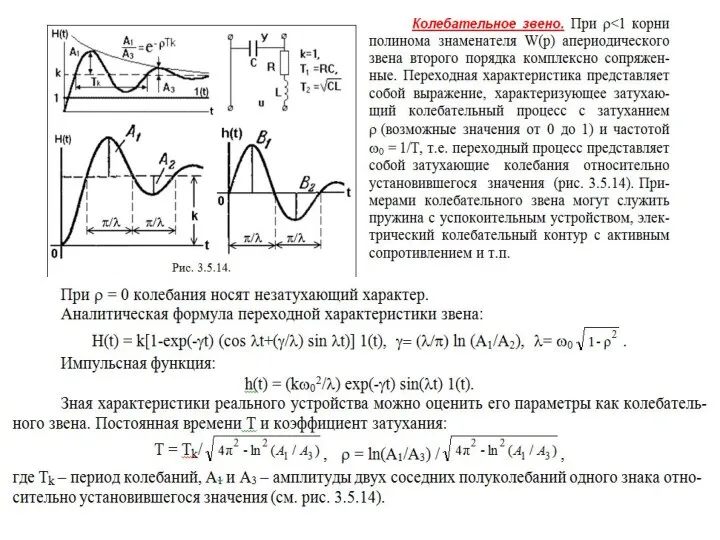
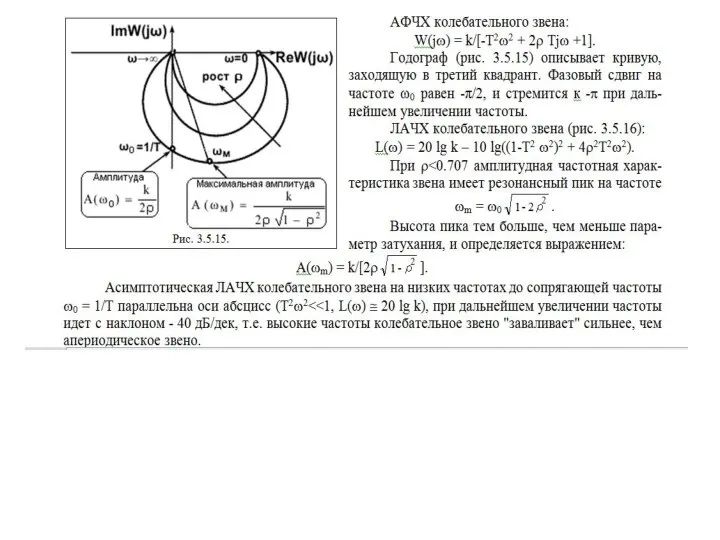
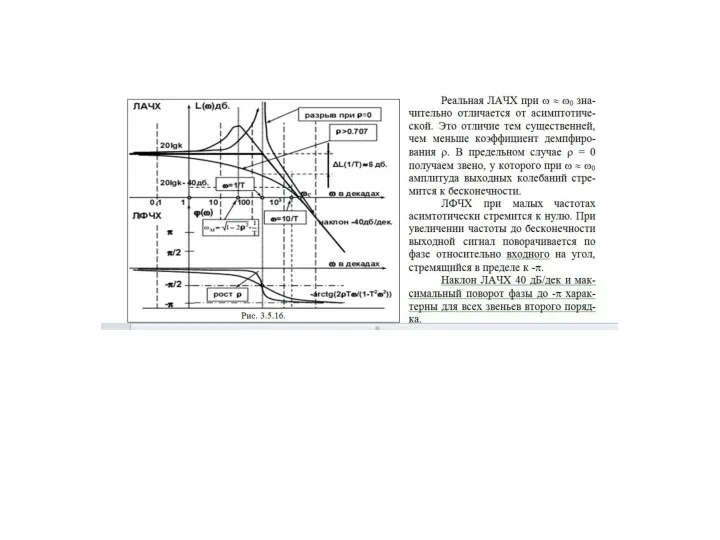
ХАРАКТЕРИСТИКИ ЭЛЕМЕНТАРНЫХ ЗВЕНЬЕВ СИСТЕМ
ХАРАКТЕРИСТИКИ ЭЛЕМЕНТАРНЫХ ЗВЕНЬЕВ СИСТЕМ
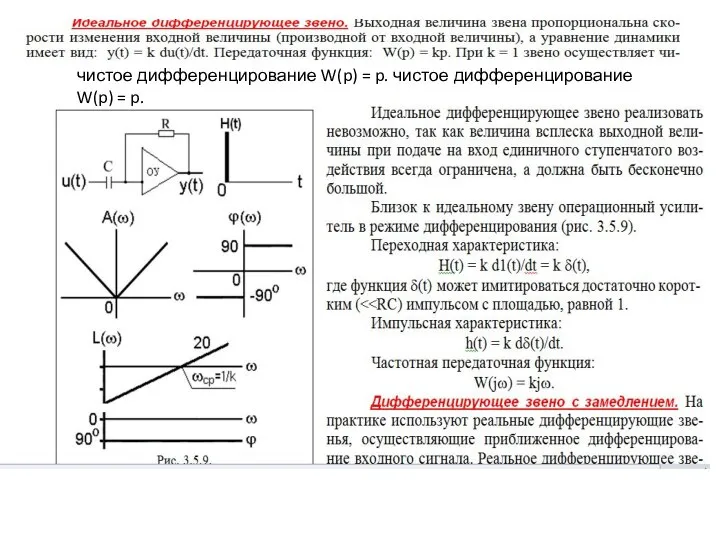
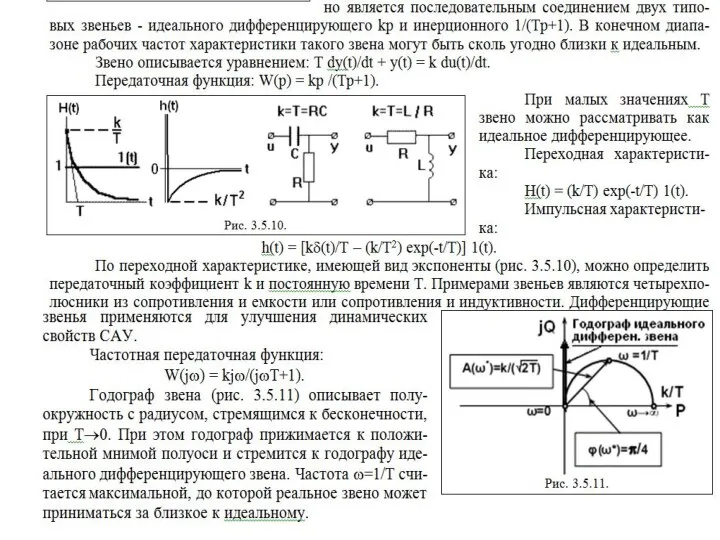
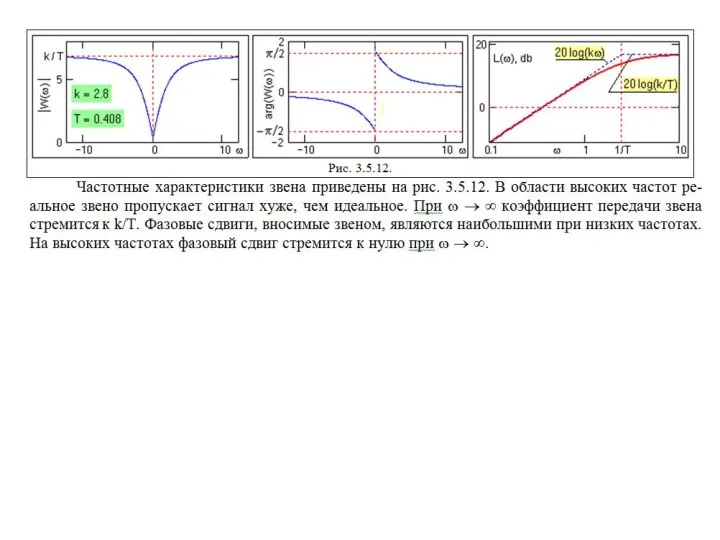
чистое дифференцирование W(p) = p. чистое дифференцирование W(p) = p.
чистое дифференцирование W(p) = p. чистое дифференцирование W(p) = p.
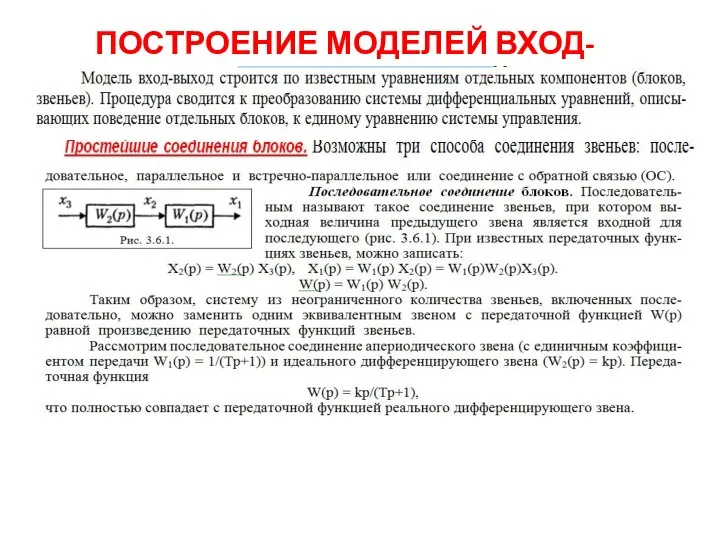
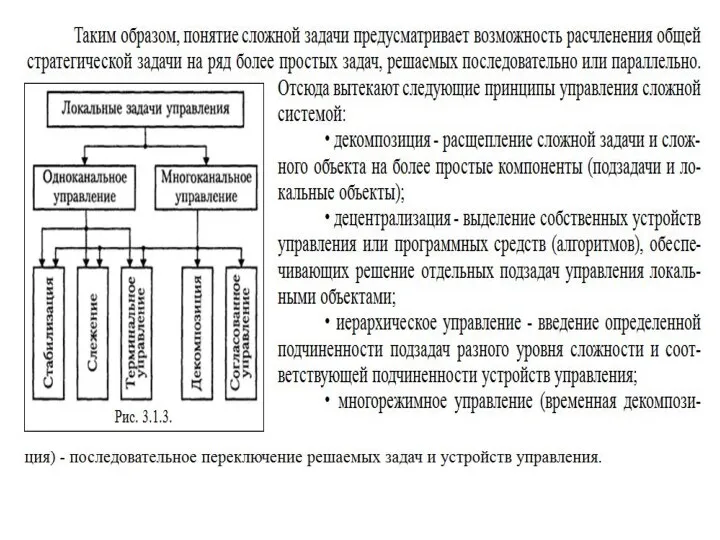
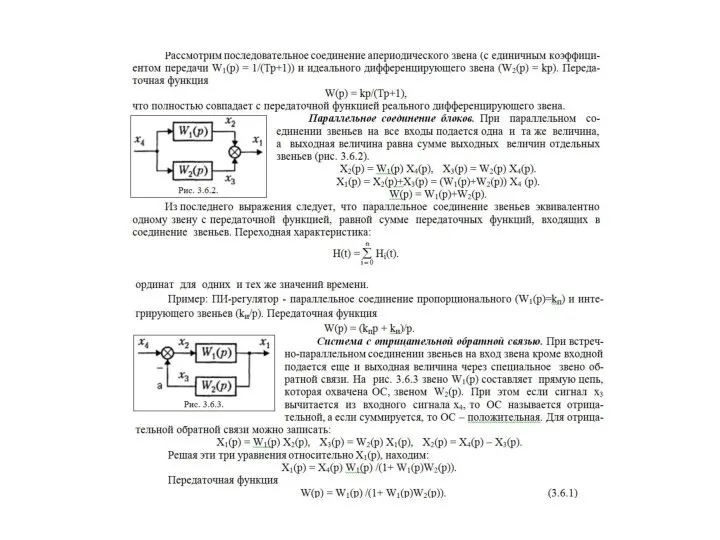
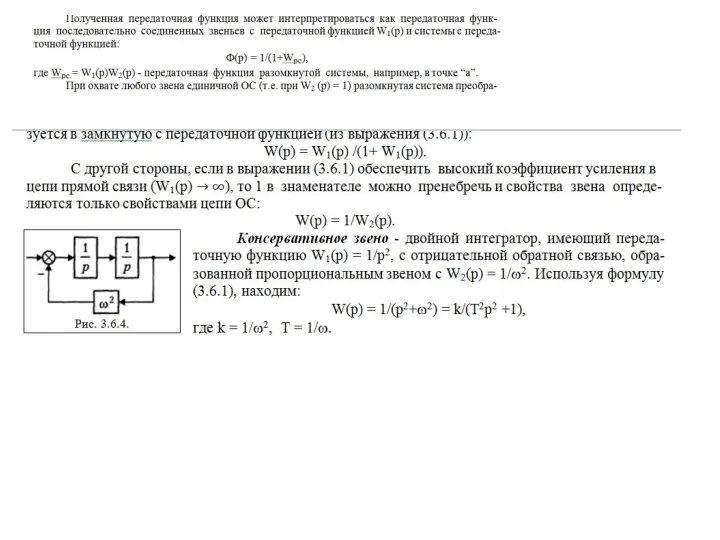
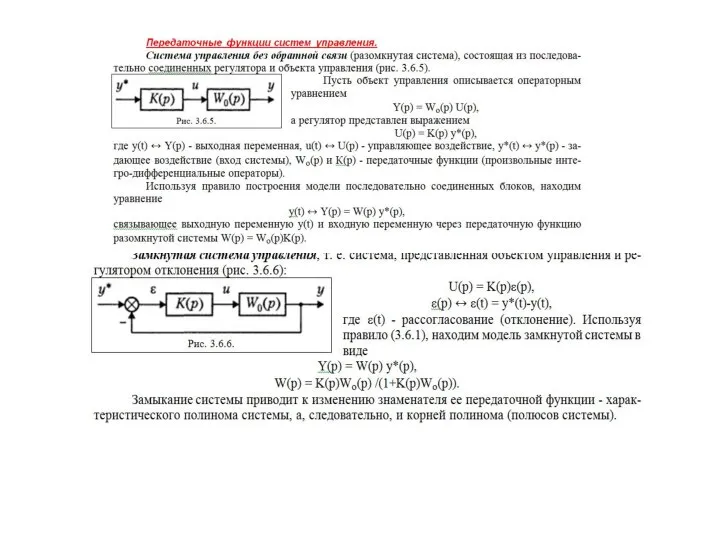
ПОСТРОЕНИЕ МОДЕЛЕЙ ВХОД-ВЫХОД
ПОСТРОЕНИЕ МОДЕЛЕЙ ВХОД-ВЫХОД
Лабораторная работа № 3
Моделирование системы стабилизации судна на курсе в пакете
Лабораторная работа № 3 Моделирование системы стабилизации судна на курсе в пакете
ЛИТЕРАТУРА
1. Мирошник И.В. Теория автоматического управления. Линейные системы: Учебное пособие для
ЛИТЕРАТУРА
1. Мирошник И.В. Теория автоматического управления. Линейные системы: Учебное пособие для
 Спутниковые системы связи и позиционирования
Спутниковые системы связи и позиционирования Культура эпохи Ренессанса
Культура эпохи Ренессанса Азербайджанские народные игры
Азербайджанские народные игры Культура и искусство Древней Руси
Культура и искусство Древней Руси Презентация "Бумажные картины Карлоса Мейра" - скачать презентации по МХК
Презентация "Бумажные картины Карлоса Мейра" - скачать презентации по МХК Copyright 2010, ELVEES Видеоаналитика Orwell 2k ОТ АНАЛИЗА К СИНТЕЗУ Директор НПЦ «ЭЛВИС», д.т.н. Петричкович Я.Я. - презентация
Copyright 2010, ELVEES Видеоаналитика Orwell 2k ОТ АНАЛИЗА К СИНТЕЗУ Директор НПЦ «ЭЛВИС», д.т.н. Петричкович Я.Я. - презентация Понятие теории государства и права. Место ТГП в системе общественных и правовых наук.Функции Теории государства и права.
Понятие теории государства и права. Место ТГП в системе общественных и правовых наук.Функции Теории государства и права. Культура адыгских народов
Культура адыгских народов Нетрадиционные методы рисования.
Нетрадиционные методы рисования. Растворы. Термодинамика процесса растворения. Способы выражения концентрации растворов.
Растворы. Термодинамика процесса растворения. Способы выражения концентрации растворов.  Стус Василь Семенович
Стус Василь Семенович Политические пиар - технологии
Политические пиар - технологии Народные промыслы и художественные ремесла России. Художественная обработка дерева
Народные промыслы и художественные ремесла России. Художественная обработка дерева Общие анестетики
Общие анестетики  Мексика. Культура Мексики
Мексика. Культура Мексики Судейство в баскетболе
Судейство в баскетболе Роли психологических факторов эффективной управленческой деятельности
Роли психологических факторов эффективной управленческой деятельности  Российская Академия Народного Хозяйства и Государственной Службы При Президенте Российской Федерации Разработка Стратегическо
Российская Академия Народного Хозяйства и Государственной Службы При Президенте Российской Федерации Разработка Стратегическо Мен және заң
Мен және заң ФИЛОСОФСКАЯ ЛИРИКА 3
ФИЛОСОФСКАЯ ЛИРИКА 3 Лесков
Лесков Организация ввода и вывода данных. Начала программирования
Организация ввода и вывода данных. Начала программирования Любовь
Любовь Испанский язык в Латинской Америке
Испанский язык в Латинской Америке Обычаи осетинского народа
Обычаи осетинского народа Быть человеком - презентация для начальной школы
Быть человеком - презентация для начальной школы Основные факторы устойчивости коллоидов. Коагуляция. Коллоидная защита и пептизация
Основные факторы устойчивости коллоидов. Коагуляция. Коллоидная защита и пептизация  Подъемный кран. Lego. (Занятие 5)
Подъемный кран. Lego. (Занятие 5)