- Оценка качества управления

Содержание
- 2. Пусть В соответствии с принципом суперпозиции, линейная непрерывная САУ в операторной форме описывается уравнением динамики
- 3. где Теорема о конечном значении оригинала Поэтому в статическом режиме (при ) в уравнении динамики в
- 4. Уравнение динамики превратится в уравнение статики Рассмотрим пример. Пусть тогда
- 5. При получим Здесь – коэффициент передачи разомкнутой цепи САУ
- 6. Уравнение статики для рассмотренной САУ Пусть , тогда Это уравнение регулировочной характеристики САУ
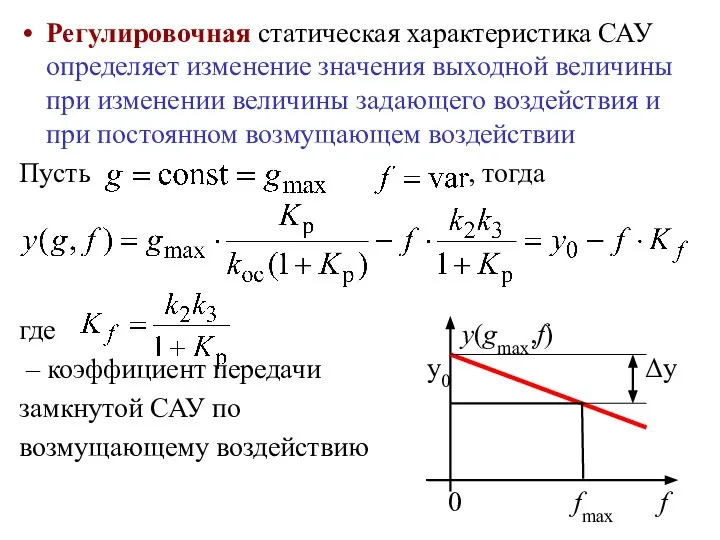
- 7. Регулировочная статическая характеристика САУ определяет изменение значения выходной величины при изменении величины задающего воздействия и при
- 8. Это внешняя статическая характеристика САУ, она определяет изменение значения выходной величины при изменении величины возмущающего воздействия
- 9. где y0 – значение выходной величины на холостом ходу (при ) Для полного устранения статической ошибки,
- 10. Астатические системы Пусть в системе присутствует интегрирующее звено тогда
- 11. Следовательно, статическая ошибка Системы, в которых при стремлении возмущающего воздействия к постоянной величине отклонение выходной величины
- 12. Вывод: Система будет астатической только в том случае, если интегрирующее звено будет включено на участке структурной
- 13. В системах с астатизмом второго порядка, помимо статической, также будет равна нулю и ошибка по производной
- 14. Введём в рассмотренную систему ещё одно интегрирующее звено с передаточной функцией и выведем для неё передаточную
- 15. Характеристический полином САУ где По критерию Гурвица система будет устойчива, если В нашем случае Вывод: система
- 16. Подача возмущающего воздействия сопровождается большими бросками выходной величины Присутствие в числителе передаточной функции оператора Лапласа р
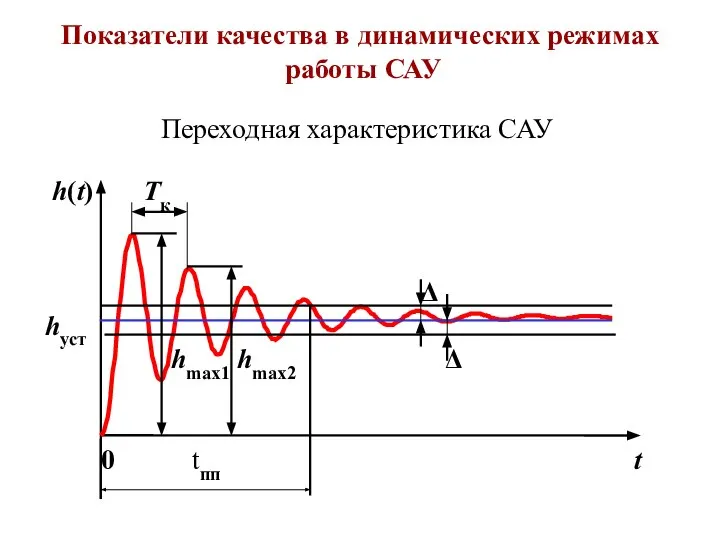
- 17. Показатели качества в динамических режимах работы САУ Переходная характеристика САУ
- 18. Основные показатели качества регулирования Время переходного процесса характеризует быстродействие системы. Определяется как интервал времени от начала
- 19. Дополнительные показатели качества Период собственных колебаний – это расстояние между двумя соседними максимумами на переходной характеристике
- 21. Скачать презентацию
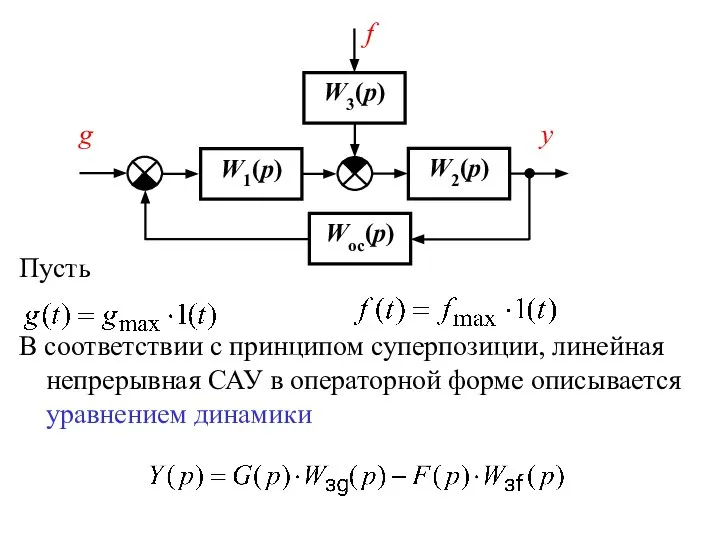
Пусть
В соответствии с принципом суперпозиции, линейная непрерывная САУ в операторной форме
Пусть
В соответствии с принципом суперпозиции, линейная непрерывная САУ в операторной форме
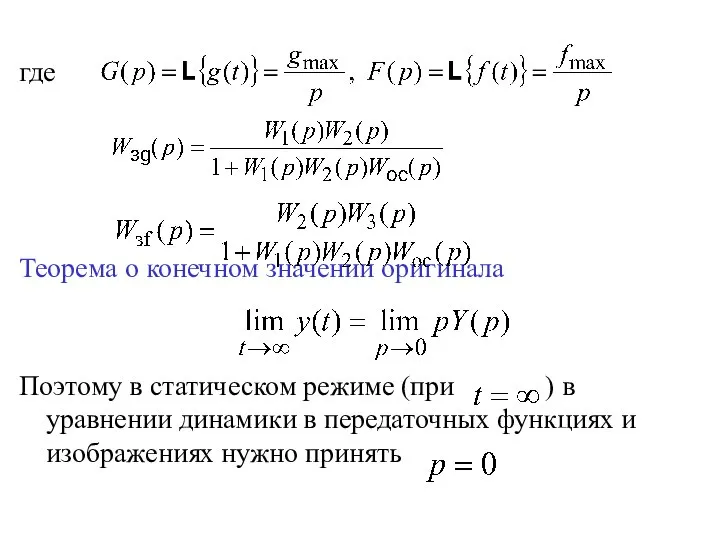
где
Теорема о конечном значении оригинала
Поэтому в статическом режиме (при )
Теорема о конечном значении оригинала
Поэтому в статическом режиме (при )
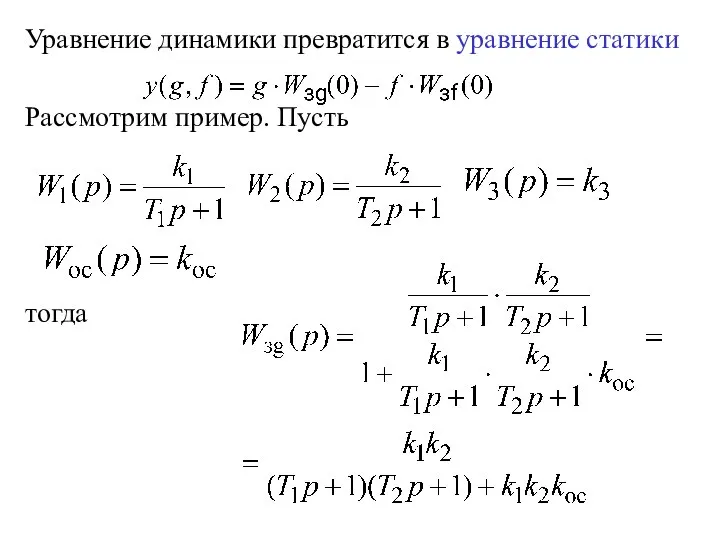
Уравнение динамики превратится в уравнение статики
Рассмотрим пример. Пусть
тогда
Уравнение динамики превратится в уравнение статики
Рассмотрим пример. Пусть
тогда
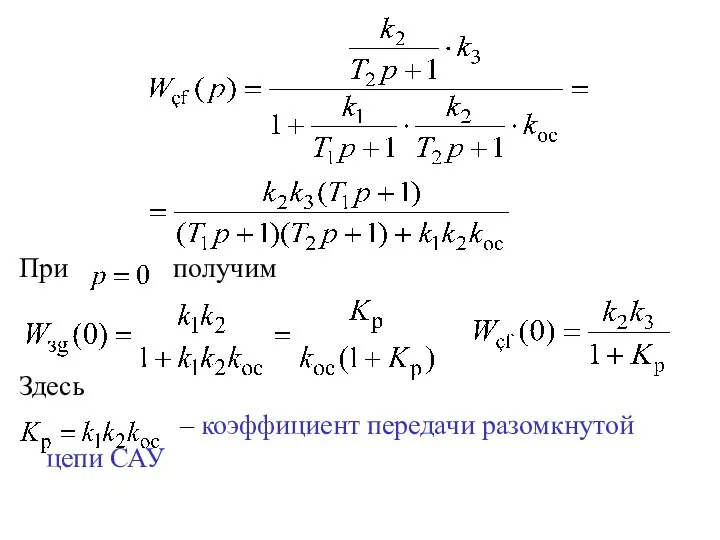
При получим
Здесь
– коэффициент передачи разомкнутой цепи САУ
При получим
Здесь
– коэффициент передачи разомкнутой цепи САУ
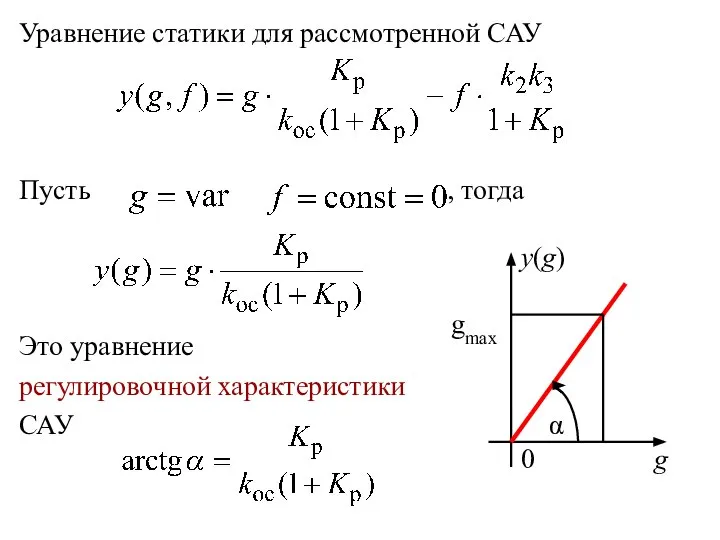
Уравнение статики для рассмотренной САУ
Пусть , тогда
Это уравнение
регулировочной характеристики
САУ
Уравнение статики для рассмотренной САУ
Пусть , тогда
Это уравнение
регулировочной характеристики
САУ
Регулировочная статическая характеристика САУ определяет изменение значения выходной величины при изменении
Регулировочная статическая характеристика САУ определяет изменение значения выходной величины при изменении
Это внешняя статическая характеристика САУ, она определяет изменение значения выходной величины
Это внешняя статическая характеристика САУ, она определяет изменение значения выходной величины
где y0 – значение выходной величины на холостом ходу
(при )
Для
где y0 – значение выходной величины на холостом ходу
(при )
Для
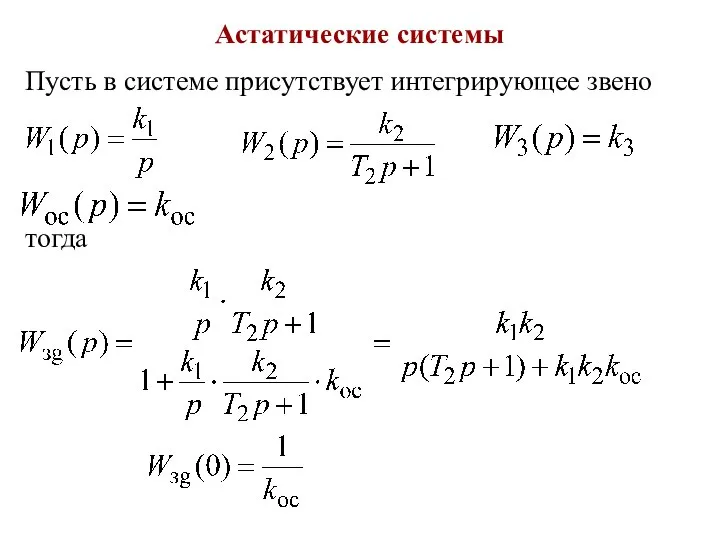
Астатические системы
Пусть в системе присутствует интегрирующее звено
тогда
Астатические системы
Пусть в системе присутствует интегрирующее звено
тогда
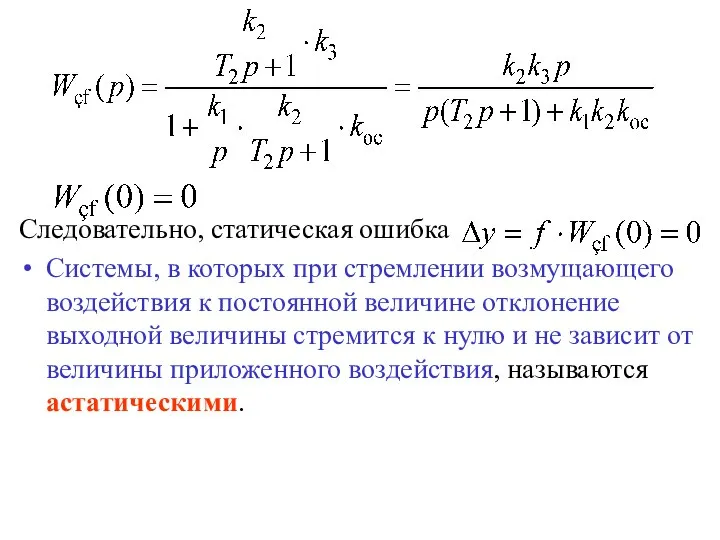
Следовательно, статическая ошибка
Системы, в которых при стремлении возмущающего воздействия к
Следовательно, статическая ошибка
Системы, в которых при стремлении возмущающего воздействия к
Вывод:
Система будет астатической только в том случае, если интегрирующее звено будет
Вывод:
Система будет астатической только в том случае, если интегрирующее звено будет
В системах с астатизмом второго порядка, помимо статической, также будет равна
В системах с астатизмом второго порядка, помимо статической, также будет равна
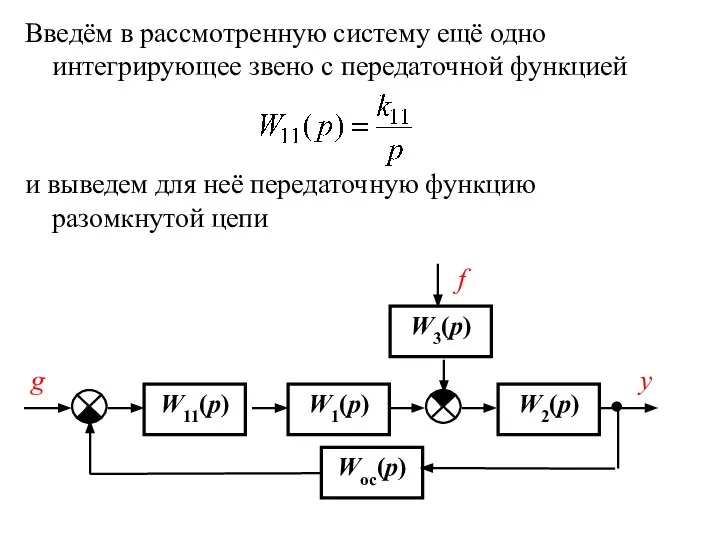
Введём в рассмотренную систему ещё одно интегрирующее звено с передаточной функцией
и
Введём в рассмотренную систему ещё одно интегрирующее звено с передаточной функцией
и
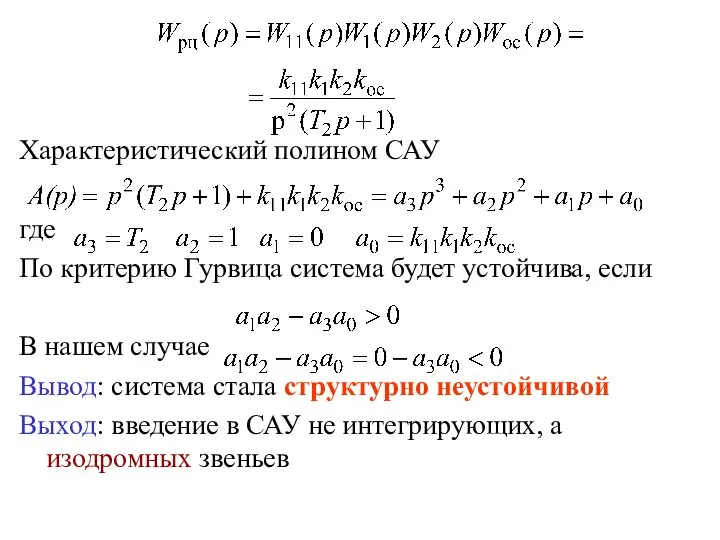
Характеристический полином САУ
где
По критерию Гурвица система будет устойчива, если
В нашем
Характеристический полином САУ
где
По критерию Гурвица система будет устойчива, если
В нашем
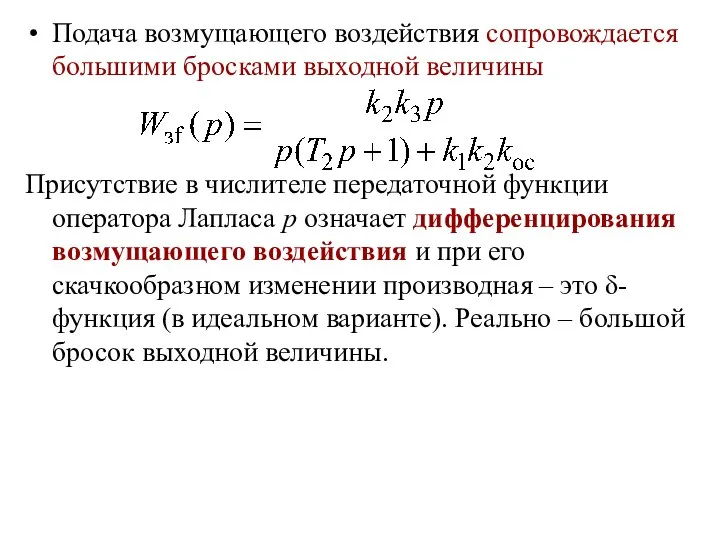
Подача возмущающего воздействия сопровождается большими бросками выходной величины
Присутствие в числителе передаточной
Подача возмущающего воздействия сопровождается большими бросками выходной величины
Присутствие в числителе передаточной
Показатели качества в динамических режимах
работы САУ
Переходная характеристика САУ
Показатели качества в динамических режимах
работы САУ
Переходная характеристика САУ
Основные показатели качества регулирования
Время переходного процесса характеризует быстродействие системы. Определяется как
Основные показатели качества регулирования
Время переходного процесса характеризует быстродействие системы. Определяется как
Дополнительные показатели качества
Период собственных колебаний – это расстояние между двумя соседними
Дополнительные показатели качества
Период собственных колебаний – это расстояние между двумя соседними
 Международная грантовая программа «Православная инициатива»
Международная грантовая программа «Православная инициатива» Механизация измельчения зерновых кормов
Механизация измельчения зерновых кормов Профориентационное занятие по курсу Г.В.Резапкиной Презентация подготовлена педагогом-психологом ГОУ ЦО № 771, г.Москвы ДЕТ
Профориентационное занятие по курсу Г.В.Резапкиной Презентация подготовлена педагогом-психологом ГОУ ЦО № 771, г.Москвы ДЕТ Кинематический анализ плоского рычажного механизма V- образного ДВС. (Семинар 2)
Кинематический анализ плоского рычажного механизма V- образного ДВС. (Семинар 2) «Общие правила безопасности во время активного отдыха на природе»
«Общие правила безопасности во время активного отдыха на природе» Известные хоккеисты
Известные хоккеисты Достопримечательности Северо-запада и Европейского-севера России
Достопримечательности Северо-запада и Европейского-севера России Россия на международном рынке «Халяль»: основные тенденции и возможности
Россия на международном рынке «Халяль»: основные тенденции и возможности АО Авиакомпания «Россия». ЭЛТ "КАННАД 406 АС"
АО Авиакомпания «Россия». ЭЛТ "КАННАД 406 АС" Кривые поверхности
Кривые поверхности Упрочняющие и просветляющие покрытия очковых линз. Многослойные (интегральные) покрытия
Упрочняющие и просветляющие покрытия очковых линз. Многослойные (интегральные) покрытия Гелиоцентрическая система мира
Гелиоцентрическая система мира Презентация "Всемирный потоп" - скачать презентации по МХК
Презентация "Всемирный потоп" - скачать презентации по МХК Развитие науки и технологий Выполнила Мотырева А.
Развитие науки и технологий Выполнила Мотырева А. Технология трехмерного твердотельного моделирования в программе КОМПАС -3D LT с применением команды кинематическая операция
Технология трехмерного твердотельного моделирования в программе КОМПАС -3D LT с применением команды кинематическая операция Т20 АЗРН2.ppt
Т20 АЗРН2.ppt Общие сведения о проводниках
Общие сведения о проводниках ЗВІТ ПРО ВИКОНАННЯ ПРОГРАМИ « Основні орієнтири виховання» Підготувала : класний керівник 9 класу Плющик О.В.
ЗВІТ ПРО ВИКОНАННЯ ПРОГРАМИ « Основні орієнтири виховання» Підготувала : класний керівник 9 класу Плющик О.В. Искусство Новгородских земель XI-XIII вв. Пригороды Великого Новгорода. Церковь Спаса на Нередице. Новгород. XII в
Искусство Новгородских земель XI-XIII вв. Пригороды Великого Новгорода. Церковь Спаса на Нередице. Новгород. XII в ПОСЛЕДОВАТЕЛЬНЫЙ ВВОД-ВЫВОД
ПОСЛЕДОВАТЕЛЬНЫЙ ВВОД-ВЫВОД ВызовВызовобщепризнанный способ действий является наилучшим существующий метод применяется издавна и проверен временем, поэтом
ВызовВызовобщепризнанный способ действий является наилучшим существующий метод применяется издавна и проверен временем, поэтом Новые образовательные стандарты Традиционный взгляд: Основная задача школы - дать хорошие прочные ЗНАНИЯ
Новые образовательные стандарты Традиционный взгляд: Основная задача школы - дать хорошие прочные ЗНАНИЯ  «Has, Has, Osterhas»
«Has, Has, Osterhas» Проектная работа на тему: «Остановка»
Проектная работа на тему: «Остановка» Виджеты и их свойства
Виджеты и их свойства Salmon Backpacking and Rafting Adventure
Salmon Backpacking and Rafting Adventure Основные положения 4 части гражданского кодекса РФ Подготовила студентка ФТД-4 группы Т-103 Лепичева Наталия
Основные положения 4 части гражданского кодекса РФ Подготовила студентка ФТД-4 группы Т-103 Лепичева Наталия 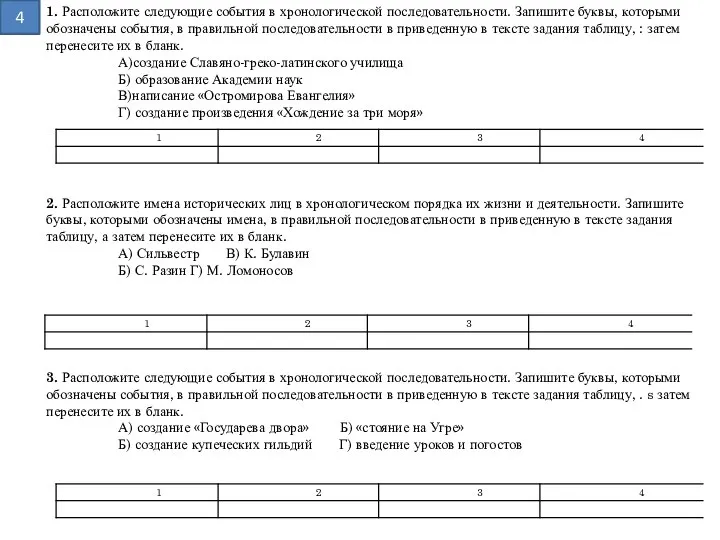 История России. Тест по типу ЕГЭ
История России. Тест по типу ЕГЭ