- Т20 АЗРН2.ppt

Содержание
- 2. * Доплерівські вимірювачі швидкості і кута зносу. Застосування автономних засобів радіонавігації для рішення навігаційних задач. Застосування
- 3. * Контрольні завдання (АЗРН2) Проаналізуйте вплив крену літака на результати вимірювання шляхової швидкості і кута зносу
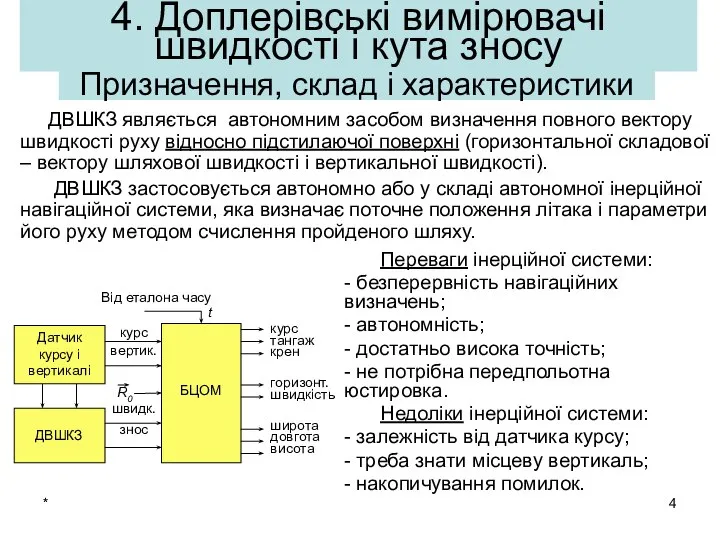
- 4. * ДВШКЗ являється автономним засобом визначення повного вектору швидкості руху відносно підстилаючої поверхні (горизонтальної складової –
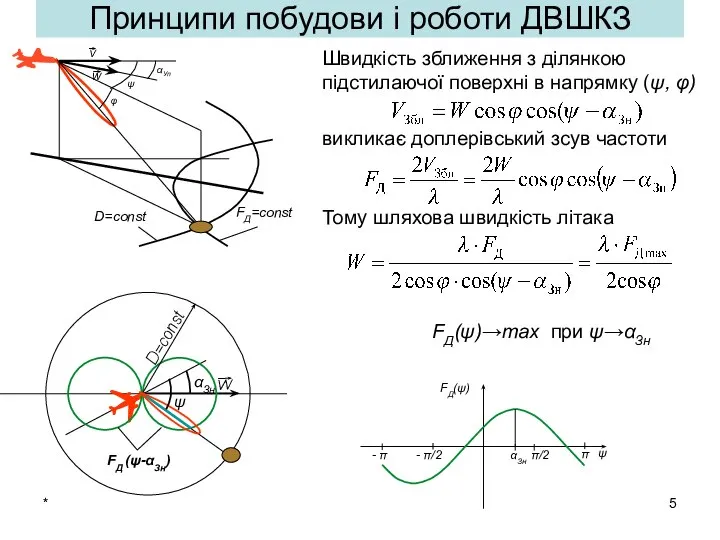
- 5. * Принципи побудови і роботи ДВШКЗ Швидкість зближення з ділянкою підстилаючої поверхні в напрямку (ψ, φ)
- 6. * Ширина спектру залежить також від орієнтації“ плями” відносно ізодопи. Випадковий характер спектру відбитого сигналу і
- 7. * В межах “плями” на підстилаючій поверхні окремі елементи поверхні опромінюються під різними кутами γ, що
- 8. Однопроменевий ДВШКЗ В горизонтальному польоті Поворотом антени знаходиться положення, коли FД=FД max. Тоді і αЗн=ψ, але
- 9. Двохпроменевий ДВШКЗ В двохпроменевих ДВШКЗ можна одночасно визначати W і αЗн. Односторонній ДВШКЗ Обидва променя орієнтовані
- 10. * Двохсторонній ДВШКЗ Обидва променя орієнтовані діагонально (1 і 3) або назад (2 і 4): При
- 11. * Чотирьохпроменевий ДВШКЗ Шляхом подальшої обробки сигналів усіх каналів при WВ=0 отримуються сигнали Якщо антена поворотна
- 12. * Доплерівські зсуви частоти по променям 1, 3 і 4 створюють систему рівнянь для обчислення повного
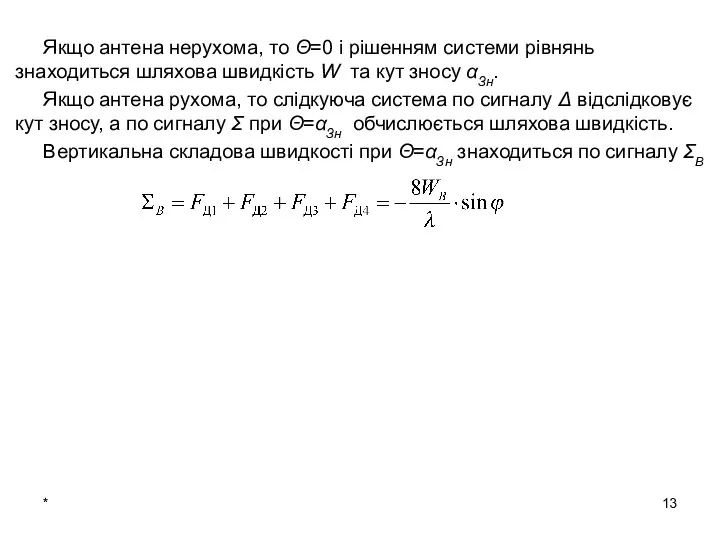
- 13. * Якщо антена нерухома, то Θ=0 і рішенням системи рівнянь знаходиться шляхова швидкість W та кут
- 14. * Методи вимірювання доплерівського зсуву частоти Для отримання вузьких променів ДСА в ДВШКЗ звичайно застосовують сантиметровий
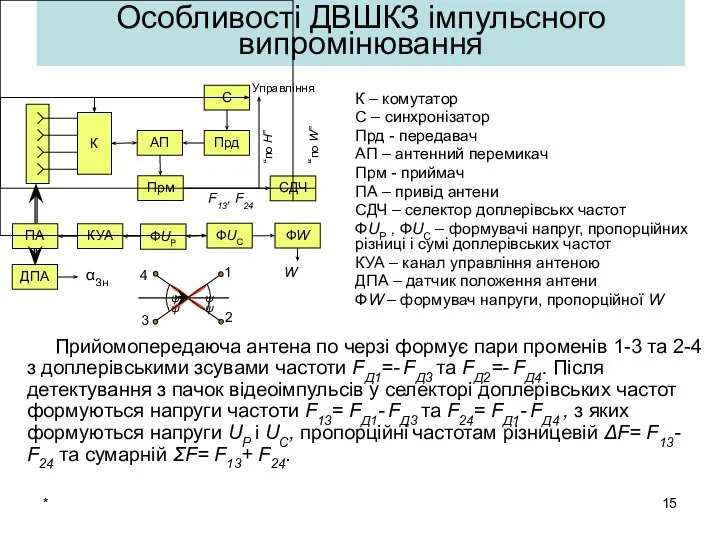
- 15. * К – комутатор С – синхронізатор Прд - передавач АП – антенний перемикач Прм -
- 16. * Напруга UР забезпечує відслідковування поворотною антеною напрямку руху літака. Кут зносу видає датчик положення антени.
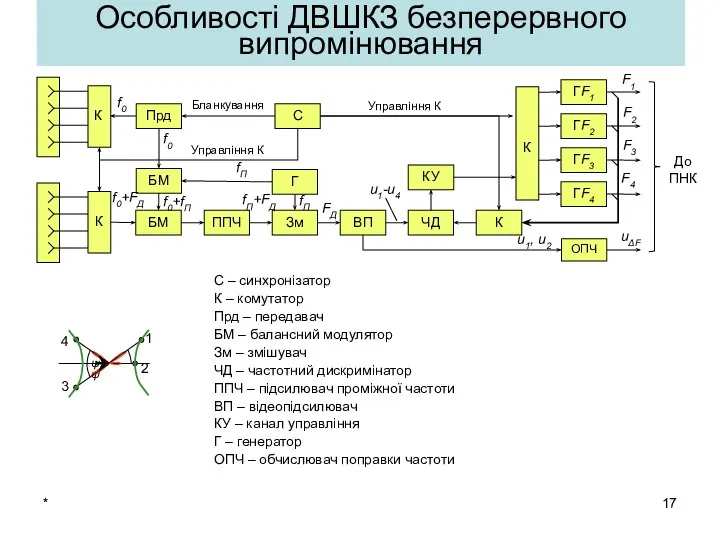
- 17. * С – синхронізатор К – комутатор Прд – передавач БМ – балансний модулятор Зм –
- 18. * Безперервний когерентний зондуючий сигнал передавача комутатором по черзі випромінюється променями 1 … 4 передаючої антени.
- 19. * В обчислювачі ПНК по сигналам F1, F2 і F3 обчислюються шляхова швидкість і кут зносу.
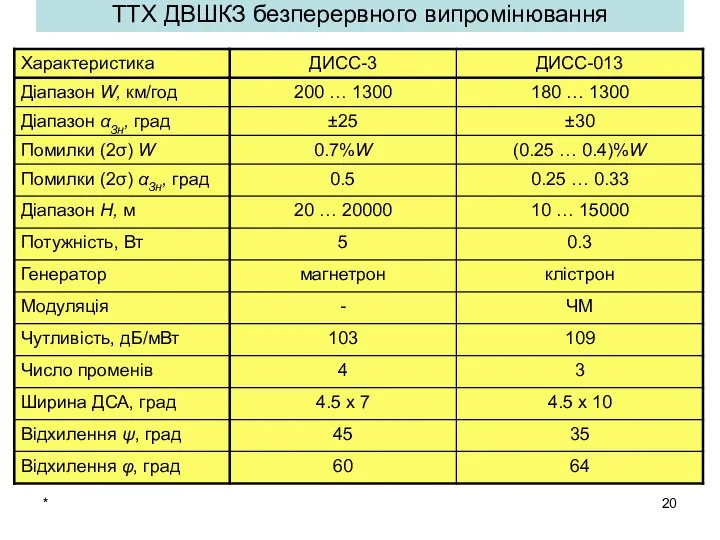
- 20. * ТТХ ДВШКЗ безперервного випромінювання
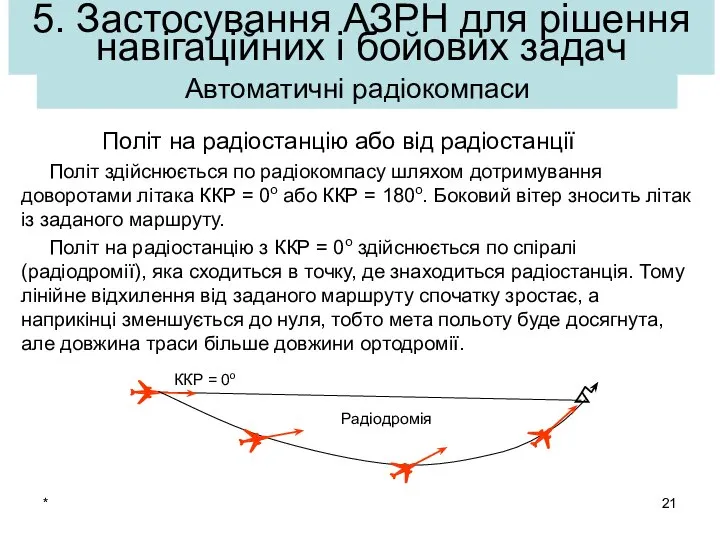
- 21. * 5. Застосування АЗРН для рішення навігаційних і бойових задач Автоматичні радіокомпаси Політ на радіостанцію або
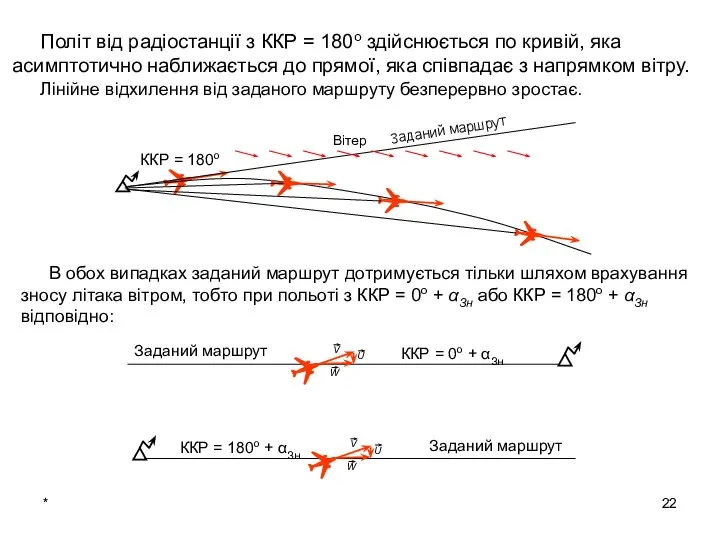
- 22. * Політ від радіостанції з ККР = 180о здійснюється по кривій, яка асимптотично наближається до прямої,
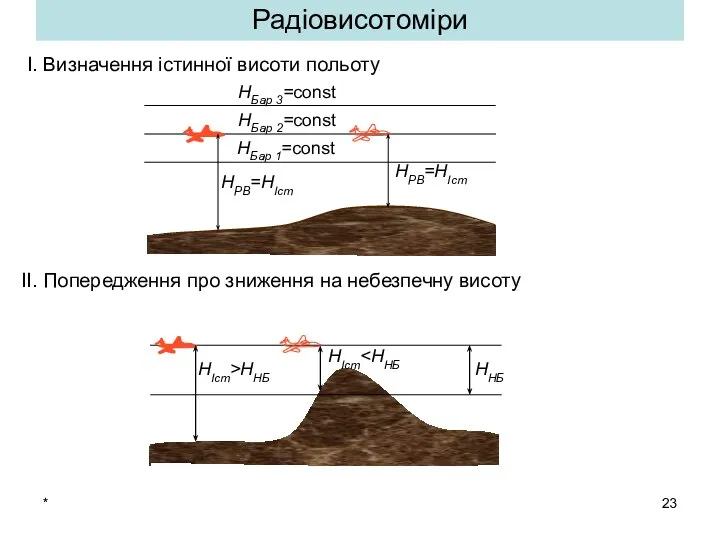
- 23. * Радіовисотоміри І. Визначення істинної висоти польоту ІІ. Попередження про зниження на небезпечну висоту
- 24. І. Політ по маршруту: - дотримання прокладеного маршруту: для цього політ по заданому маршруту здійснюється з
- 25. ІІ. Визначення місцеположення Поточне місцеположення літака визначається його поточними координатами [x(t); z(t)], які знаходяться методом счислення
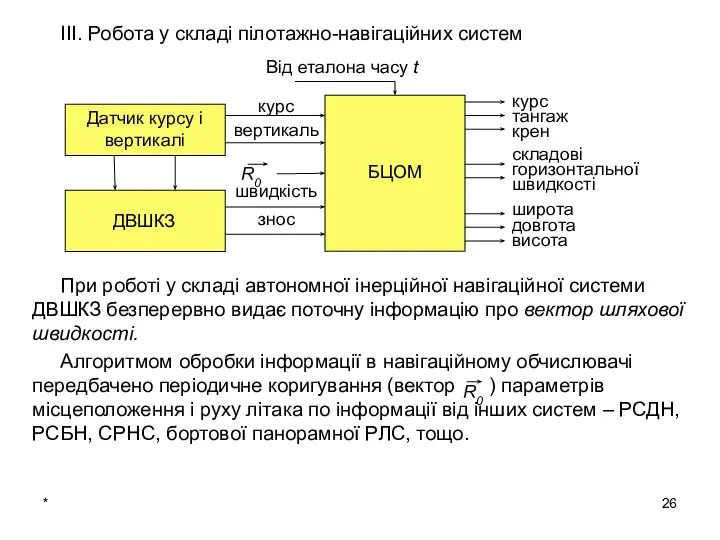
- 26. * ІІІ. Робота у складі пілотажно-навігаційних систем При роботі у складі автономної інерційної навігаційної системи ДВШКЗ
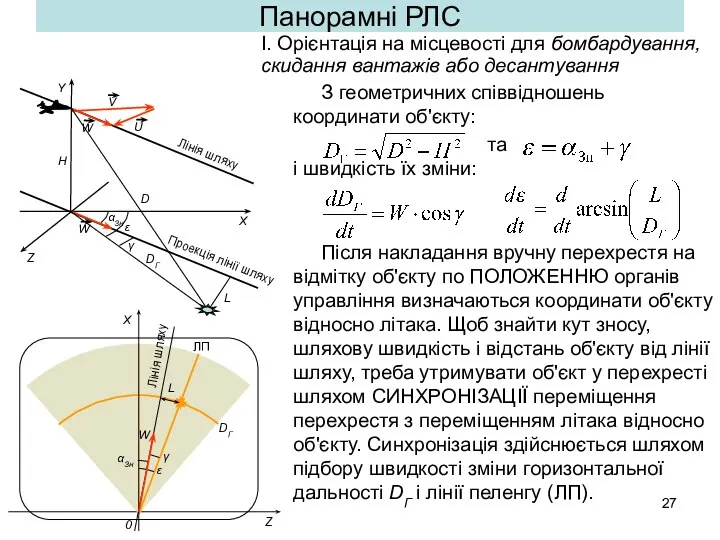
- 27. Панорамні РЛС І. Орієнтація на місцевості для бомбардування, скидання вантажів або десантування Проекція лінії шляху З
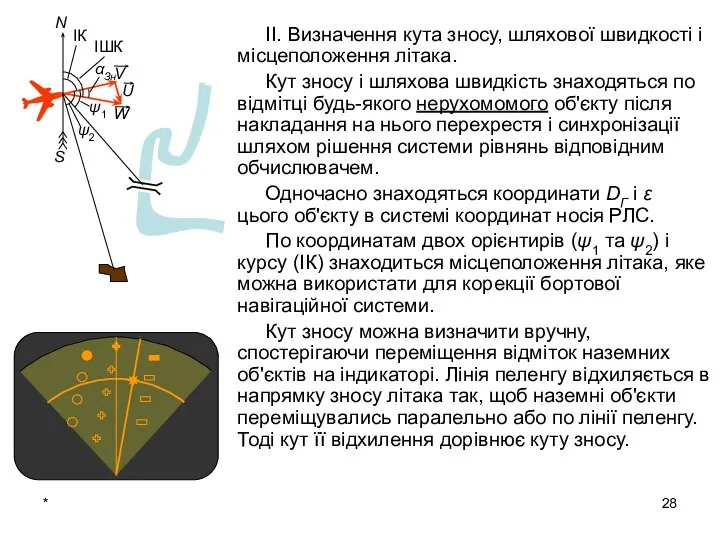
- 28. * ІІ. Визначення кута зносу, шляхової швидкості і місцеположення літака. Кут зносу і шляхова швидкість знаходяться
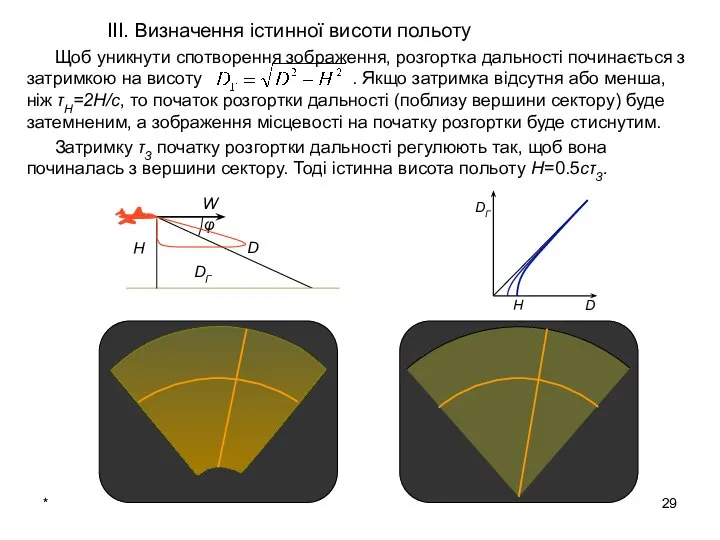
- 29. * ІІІ. Визначення істинної висоти польоту Щоб уникнути спотворення зображення, розгортка дальності починається з затримкою на
- 30. * ІV. Орієнтація по радіомаякам Крім основного режиму активної радіолокації панорамні РЛС можуть працювати в режимі
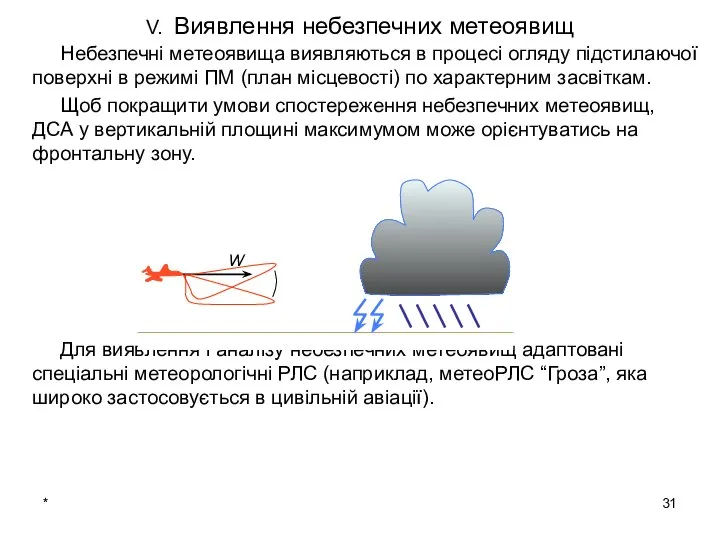
- 31. * V. Виявлення небезпечних метеоявищ Небезпечні метеоявища виявляються в процесі огляду підстилаючої поверхні в режимі ПМ
- 32. * Багатофункціональні РЛС винищувачів І. Визначення шляхової швидкості і кута зносу Сучасні багатофункціональні РЛС винищувачів обладнані
- 33. * ІІ. Отримання радіолокаційної карти місцевості Радіолокаційна карта підстилаючої земної або морської поверхні формується в режимі
- 34. * ІІІ. Попередження про небезпечні метеоявища Як і панорамна РЛС, багатофункціональна РЛС у всіх режимах роботи
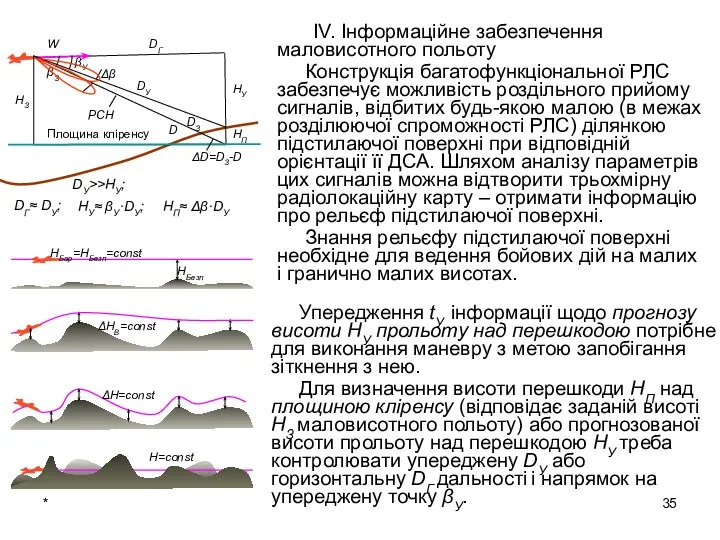
- 35. * ІV. Інформаційне забезпечення маловисотного польоту Конструкція багатофункціональної РЛС забезпечує можливість роздільного прийому сигналів, відбитих будь-якою
- 36. * Літакові відповідачі для РЛС з активною відповіддю І. Підвищення дальності дії РЛС Наземна (корабельна) РЛС
- 37. * ІІ. Автоматична передача польотної та бойової інформації Шляхом кодування сигналів запиту і відповіді в обох
- 38. * ІІІ. Індивідуальне розпізнавання літака Індивідуальне розпізнавання літака може здійснюватись двома способами: в автоматичному режимі по
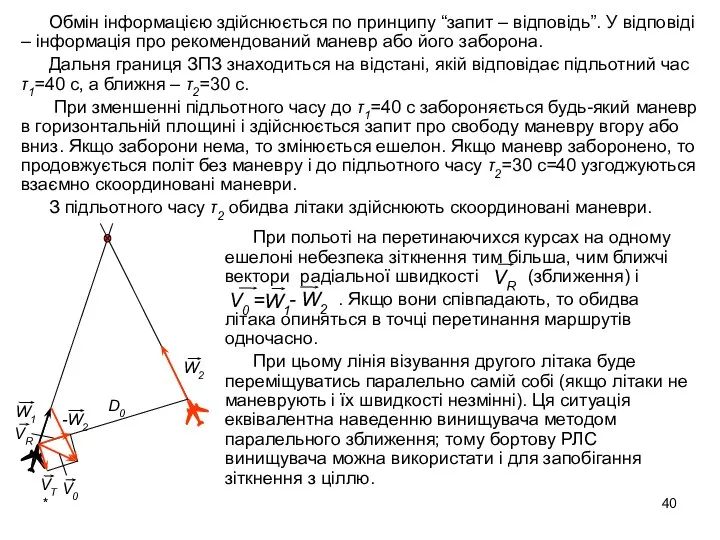
- 39. * Повітряний простір навколо захищаємого літака поділяється на повітряні зони – верхню (ВПЗ), однакововисотну (ОПЗ), захищаєму
- 40. * Обмін інформацією здійснюється по принципу “запит – відповідь”. У відповіді – інформація про рекомендований маневр
- 41. * Питання для самоконтролю Принцип роботи доплерівських вимірювачів швидкості і кута зносу. Однопроменеві ДВШКЗ. Двохпроменеві ДВШКЗ.
- 43. Скачать презентацию
*
Доплерівські вимірювачі швидкості і кута зносу.
Застосування автономних засобів радіонавігації для рішення
*
Доплерівські вимірювачі швидкості і кута зносу.
Застосування автономних засобів радіонавігації для рішення
*
Контрольні завдання (АЗРН2)
Проаналізуйте вплив крену літака на результати вимірювання шляхової швидкості
*
Контрольні завдання (АЗРН2)
Проаналізуйте вплив крену літака на результати вимірювання шляхової швидкості
*
ДВШКЗ являється автономним засобом визначення повного вектору швидкості руху відносно підстилаючої
*
ДВШКЗ являється автономним засобом визначення повного вектору швидкості руху відносно підстилаючої
*
Принципи побудови і роботи ДВШКЗ
Швидкість зближення з ділянкою підстилаючої поверхні в
*
Принципи побудови і роботи ДВШКЗ
Швидкість зближення з ділянкою підстилаючої поверхні в

*
Ширина спектру залежить також від орієнтації“ плями” відносно ізодопи.
Випадковий характер спектру
*
Ширина спектру залежить також від орієнтації“ плями” відносно ізодопи.
Випадковий характер спектру

*
В межах “плями” на підстилаючій поверхні окремі елементи поверхні опромінюються під
*
В межах “плями” на підстилаючій поверхні окремі елементи поверхні опромінюються під

Однопроменевий ДВШКЗ
В горизонтальному польоті
Поворотом антени знаходиться положення, коли FД=FД max. Тоді
і
Однопроменевий ДВШКЗ
В горизонтальному польоті
Поворотом антени знаходиться положення, коли FД=FД max. Тоді
і
Двохпроменевий ДВШКЗ
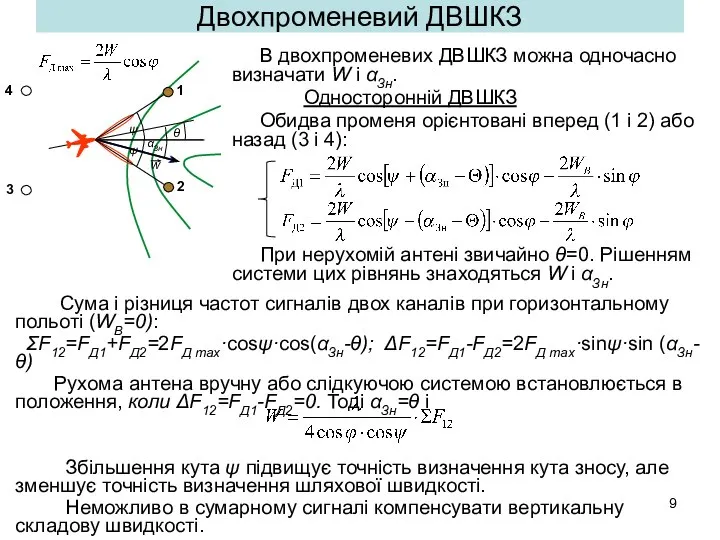
В двохпроменевих ДВШКЗ можна одночасно визначати W і αЗн.
Односторонній ДВШКЗ
Обидва
Двохпроменевий ДВШКЗ
В двохпроменевих ДВШКЗ можна одночасно визначати W і αЗн.
Односторонній ДВШКЗ
Обидва
*
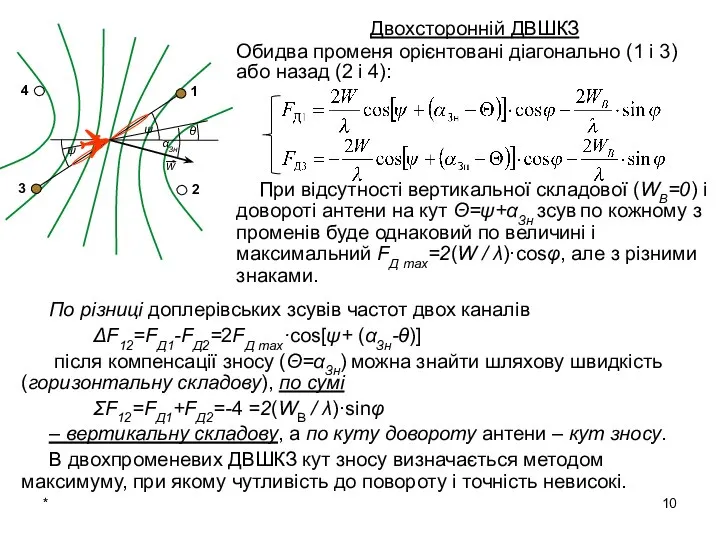
Двохсторонній ДВШКЗ
Обидва променя орієнтовані діагонально (1 і 3) або назад (2
*
Двохсторонній ДВШКЗ
Обидва променя орієнтовані діагонально (1 і 3) або назад (2
*
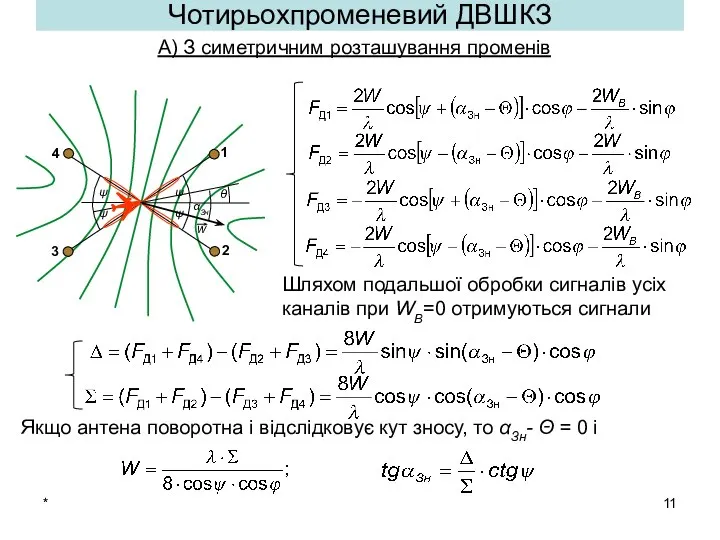
Чотирьохпроменевий ДВШКЗ
Шляхом подальшої обробки сигналів усіх каналів при WВ=0 отримуються сигнали
*
Чотирьохпроменевий ДВШКЗ
Шляхом подальшої обробки сигналів усіх каналів при WВ=0 отримуються сигнали
*
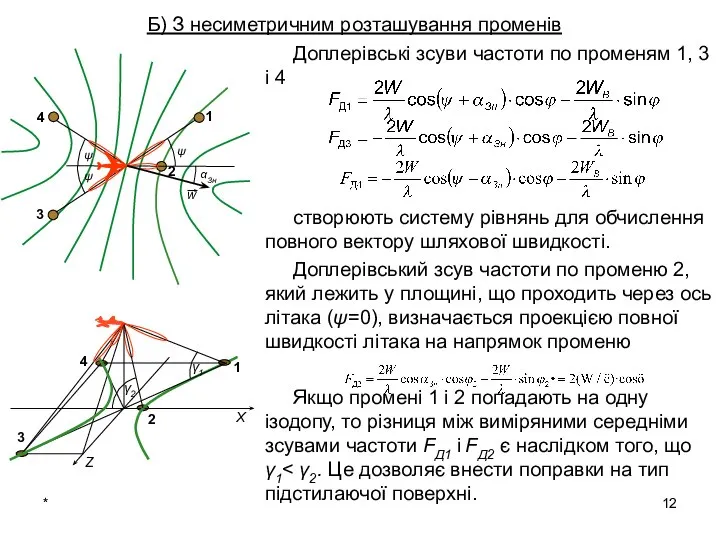
Доплерівські зсуви частоти по променям 1, 3 і 4
створюють систему рівнянь
*
Доплерівські зсуви частоти по променям 1, 3 і 4
створюють систему рівнянь
*
Якщо антена нерухома, то Θ=0 і рішенням системи рівнянь знаходиться шляхова
*
Якщо антена нерухома, то Θ=0 і рішенням системи рівнянь знаходиться шляхова

*
Методи вимірювання доплерівського зсуву частоти
Для отримання вузьких променів ДСА в ДВШКЗ
*
Методи вимірювання доплерівського зсуву частоти
Для отримання вузьких променів ДСА в ДВШКЗ
*
К – комутатор
С – синхронізатор
Прд - передавач
АП – антенний перемикач
Прм -
*
К – комутатор
С – синхронізатор
Прд - передавач
АП – антенний перемикач
Прм -
*
Напруга UР забезпечує відслідковування поворотною антеною напрямку руху літака. Кут зносу
*
Напруга UР забезпечує відслідковування поворотною антеною напрямку руху літака. Кут зносу
*
С – синхронізатор
К – комутатор
Прд – передавач
БМ – балансний модулятор
Зм –
*
С – синхронізатор
К – комутатор
Прд – передавач
БМ – балансний модулятор
Зм –

*
Безперервний когерентний зондуючий сигнал передавача комутатором по черзі випромінюється променями 1
*
Безперервний когерентний зондуючий сигнал передавача комутатором по черзі випромінюється променями 1

*
В обчислювачі ПНК по сигналам F1, F2 і F3 обчислюються шляхова
*
В обчислювачі ПНК по сигналам F1, F2 і F3 обчислюються шляхова
*
ТТХ ДВШКЗ безперервного випромінювання
*
ТТХ ДВШКЗ безперервного випромінювання
*
5. Застосування АЗРН для рішення навігаційних і бойових задач
Автоматичні радіокомпаси
Політ
*
5. Застосування АЗРН для рішення навігаційних і бойових задач
Автоматичні радіокомпаси
Політ
*
Політ від радіостанції з ККР = 180о здійснюється по кривій, яка
*
Політ від радіостанції з ККР = 180о здійснюється по кривій, яка
*
Радіовисотоміри
І. Визначення істинної висоти польоту
ІІ. Попередження про зниження на небезпечну висоту
*
Радіовисотоміри
І. Визначення істинної висоти польоту
ІІ. Попередження про зниження на небезпечну висоту
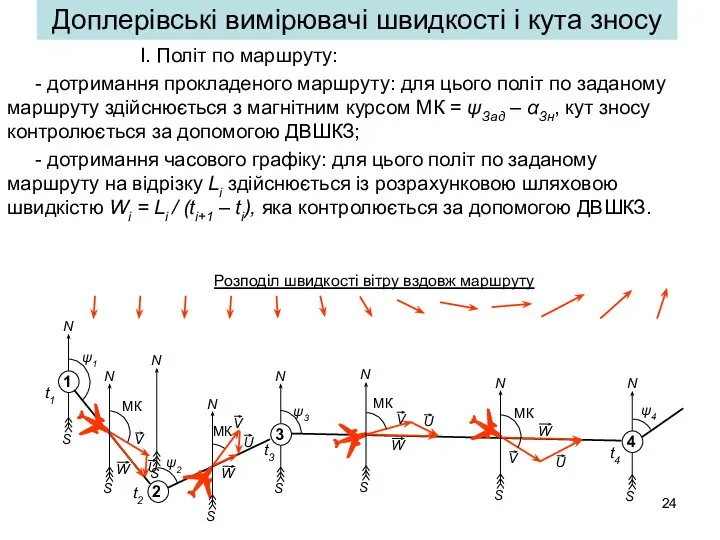
І. Політ по маршруту:
- дотримання прокладеного маршруту: для цього політ
І. Політ по маршруту:
- дотримання прокладеного маршруту: для цього політ
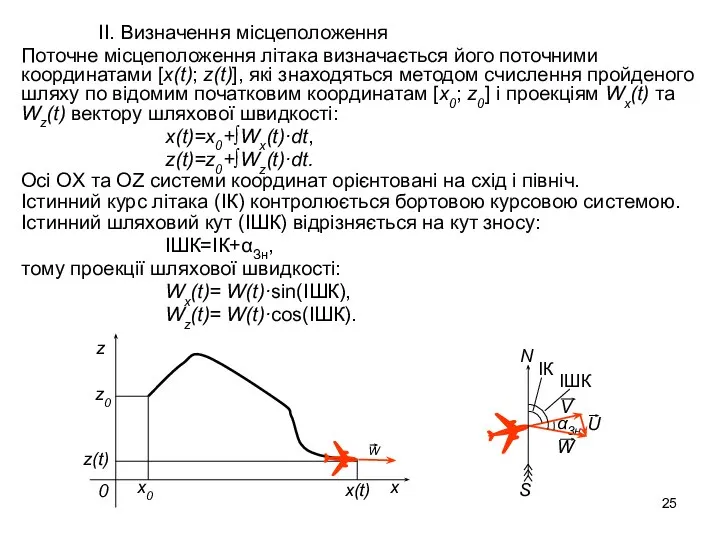
ІІ. Визначення місцеположення
Поточне місцеположення літака визначається його поточними координатами [x(t);
ІІ. Визначення місцеположення
Поточне місцеположення літака визначається його поточними координатами [x(t);
*
ІІІ. Робота у складі пілотажно-навігаційних систем
При роботі у складі автономної інерційної
*
ІІІ. Робота у складі пілотажно-навігаційних систем
При роботі у складі автономної інерційної
Панорамні РЛС
І. Орієнтація на місцевості для бомбардування, скидання вантажів або десантування
Панорамні РЛС
І. Орієнтація на місцевості для бомбардування, скидання вантажів або десантування
*
ІІ. Визначення кута зносу, шляхової швидкості і місцеположення літака.
Кут зносу і
*
ІІ. Визначення кута зносу, шляхової швидкості і місцеположення літака.
Кут зносу і
*
ІІІ. Визначення істинної висоти польоту
Щоб уникнути спотворення зображення, розгортка дальності
*
ІІІ. Визначення істинної висоти польоту
Щоб уникнути спотворення зображення, розгортка дальності
*
ІV. Орієнтація по радіомаякам
Крім основного режиму активної радіолокації панорамні РЛС
*
ІV. Орієнтація по радіомаякам
Крім основного режиму активної радіолокації панорамні РЛС
*
V. Виявлення небезпечних метеоявищ
Небезпечні метеоявища виявляються в процесі огляду підстилаючої поверхні
*
V. Виявлення небезпечних метеоявищ
Небезпечні метеоявища виявляються в процесі огляду підстилаючої поверхні
*
Багатофункціональні РЛС винищувачів
І. Визначення шляхової швидкості і кута зносу
Сучасні багатофункціональні
*
Багатофункціональні РЛС винищувачів
І. Визначення шляхової швидкості і кута зносу
Сучасні багатофункціональні

*
ІІ. Отримання радіолокаційної карти місцевості
Радіолокаційна карта підстилаючої земної або морської
*
ІІ. Отримання радіолокаційної карти місцевості
Радіолокаційна карта підстилаючої земної або морської
*
ІІІ. Попередження про небезпечні метеоявища
Як і панорамна РЛС, багатофункціональна РЛС
*
ІІІ. Попередження про небезпечні метеоявища
Як і панорамна РЛС, багатофункціональна РЛС
*
ІV. Інформаційне забезпечення маловисотного польоту
Конструкція багатофункціональної РЛС забезпечує можливість роздільного прийому
*
ІV. Інформаційне забезпечення маловисотного польоту
Конструкція багатофункціональної РЛС забезпечує можливість роздільного прийому
*
Літакові відповідачі для РЛС з активною відповіддю
І. Підвищення дальності дії РЛС
Наземна
*
Літакові відповідачі для РЛС з активною відповіддю
І. Підвищення дальності дії РЛС
Наземна
*
ІІ. Автоматична передача польотної та бойової інформації
Шляхом кодування сигналів запиту і
*
ІІ. Автоматична передача польотної та бойової інформації
Шляхом кодування сигналів запиту і

*
ІІІ. Індивідуальне розпізнавання літака
Індивідуальне розпізнавання літака може здійснюватись двома способами:
в автоматичному
*
ІІІ. Індивідуальне розпізнавання літака
Індивідуальне розпізнавання літака може здійснюватись двома способами:
в автоматичному

*
Повітряний простір навколо захищаємого літака поділяється на повітряні зони – верхню
*
Повітряний простір навколо захищаємого літака поділяється на повітряні зони – верхню
*
Обмін інформацією здійснюється по принципу “запит – відповідь”. У відповіді –
*
Обмін інформацією здійснюється по принципу “запит – відповідь”. У відповіді –
*
Питання для самоконтролю
Принцип роботи доплерівських вимірювачів швидкості і кута зносу.
Однопроменеві
*
Питання для самоконтролю
Принцип роботи доплерівських вимірювачів швидкості і кута зносу.
Однопроменеві
 Душа, як правило, передається через вираз очей, через погляд, спрямований на глядача… Відділ мистецтв пропонує! З циклу онлайн презентацій “Креатив” ОЧІ ЕПОХ III Західна
Душа, як правило, передається через вираз очей, через погляд, спрямований на глядача… Відділ мистецтв пропонує! З циклу онлайн презентацій “Креатив” ОЧІ ЕПОХ III Західна  C#, объектно-ориентированное программирование
C#, объектно-ориентированное программирование Презентация на тему "Ошибки ставшие откытиями" - скачать презентации по Педагогике
Презентация на тему "Ошибки ставшие откытиями" - скачать презентации по Педагогике Рестлинг. История рестлинга
Рестлинг. История рестлинга Составление разветвляющихся алгоритмов
Составление разветвляющихся алгоритмов Лица, перемещающие товары и транспортные средства через таможенную границу, как субъекты таможенного права. Подготовили студент
Лица, перемещающие товары и транспортные средства через таможенную границу, как субъекты таможенного права. Подготовили студент Programming paradigms
Programming paradigms Big picture. Persistence
Big picture. Persistence Утренняя зарядка. Правила её составления и выполнения
Утренняя зарядка. Правила её составления и выполнения ИНФОРМАЦИОННАЯ БЕЗОПАСНОСТЬ: ОСНОВНЫЕ АСПЕКТЫ, СОВРЕМЕННОЕ СОСТОЯНИЕ
ИНФОРМАЦИОННАЯ БЕЗОПАСНОСТЬ: ОСНОВНЫЕ АСПЕКТЫ, СОВРЕМЕННОЕ СОСТОЯНИЕ Федеральная Служба Охраны РФ
Федеральная Служба Охраны РФ Эгейское искусство Материалы к уроку МХК В 10 классе _
Эгейское искусство Материалы к уроку МХК В 10 классе _ Начертательная геометрия. Введение
Начертательная геометрия. Введение Рефлекторный принцип деятельности ЦНС
Рефлекторный принцип деятельности ЦНС Внешний образ современного учителя
Внешний образ современного учителя Кокки. cтом
Кокки. cтом Сравнительное правоведение. Чиркин Вениамин Евгеньевич
Сравнительное правоведение. Чиркин Вениамин Евгеньевич Презентация на тему "подготовка к ЕНТ" - скачать презентации по Педагогике
Презентация на тему "подготовка к ЕНТ" - скачать презентации по Педагогике Конструкторская документация. Чертежи деталей и изделий из древесины
Конструкторская документация. Чертежи деталей и изделий из древесины Астродиетология. Обозначения знаков зодиака, планет и аспектов
Астродиетология. Обозначения знаков зодиака, планет и аспектов рисуем мальчика - презентация для начальной школы
рисуем мальчика - презентация для начальной школы Презентация "ГРАФФИТИ" - скачать презентации по МХК
Презентация "ГРАФФИТИ" - скачать презентации по МХК Первый шаг к «эффективному тестировщику»: профориентация Юлия Нечаева, NIX Solutions, Харьков, Украина
Первый шаг к «эффективному тестировщику»: профориентация Юлия Нечаева, NIX Solutions, Харьков, Украина  Симплекс метод розв’язання задачі лінійного програмування
Симплекс метод розв’язання задачі лінійного програмування Военно-специальная подготовка
Военно-специальная подготовка БИОХИМИЯ МИОКАРДА-МОЗГА
БИОХИМИЯ МИОКАРДА-МОЗГА  Синхронные машины
Синхронные машины Презентация на тему "Дружная семья" - скачать презентации по Педагогике
Презентация на тему "Дружная семья" - скачать презентации по Педагогике