- Определение уравнения движения. Общий случай интегрального уравнения

Содержание
- 2. Динамическая модель механизма с w=1 и жесткими звеньями представлена в виде одного звена, к которому приведены
- 3. Закон движения выбранного звена может быть найден по приведенным параметрам динамической модели Теорема об изменении кинематической
- 4. Сумму работ можно представить в виде интеграла с переменным верхним пределом ψ от суммарного приведенного момента
- 5. Закон движения ω(ψ) звена приведения представляет решение предыдущего уравнения в виде функции обобщенной координаты ψ
- 6. Продифференцировав выражение суммы работ по координате ψ, получим дифференциальное уравнение движения:
- 7. Учитывая, что , получаем дифференцированием угловое ускорение звена приведения
- 8. МА можно представить как одно звено с переменным моментом инерции, в общем случае зависящим от обобщенной
- 9. Свяжем расчетные значения ψ со временем. Проинтегрируем и получим: При:
- 10. Определение соответствующих моментов времени движения связано с интегрированием обратной функции Вывод
- 12. Скачать презентацию
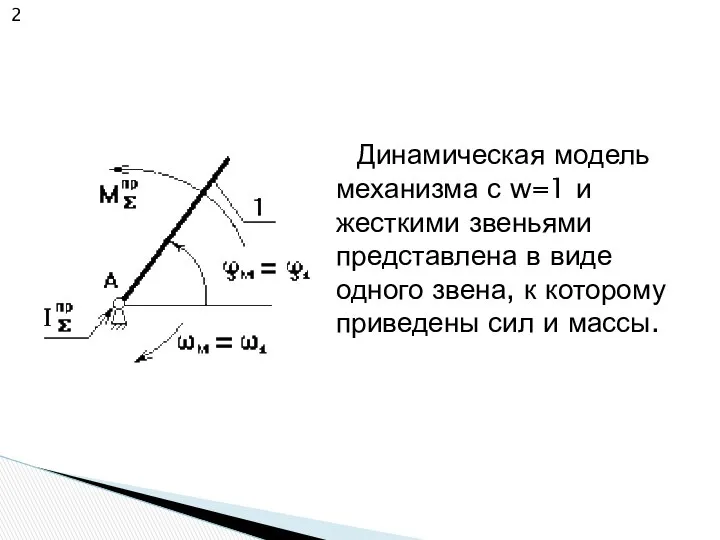
Динамическая модель механизма с w=1 и жесткими звеньями представлена в виде
Динамическая модель механизма с w=1 и жесткими звеньями представлена в виде
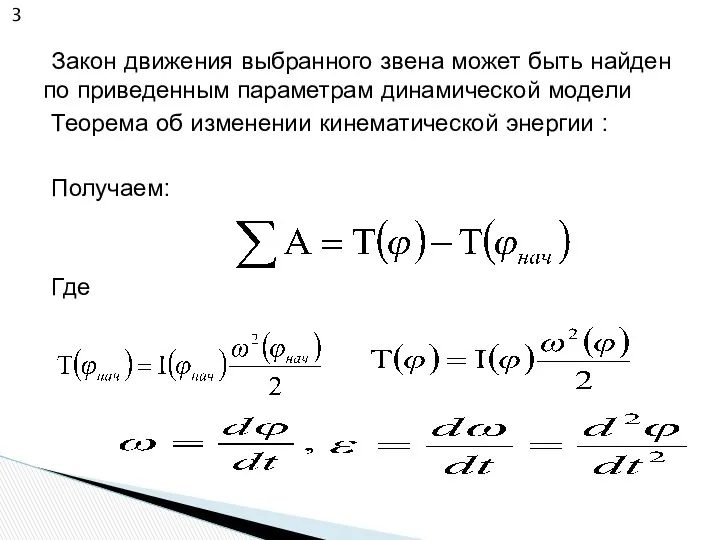
Закон движения выбранного звена может быть найден по приведенным параметрам динамической
Закон движения выбранного звена может быть найден по приведенным параметрам динамической
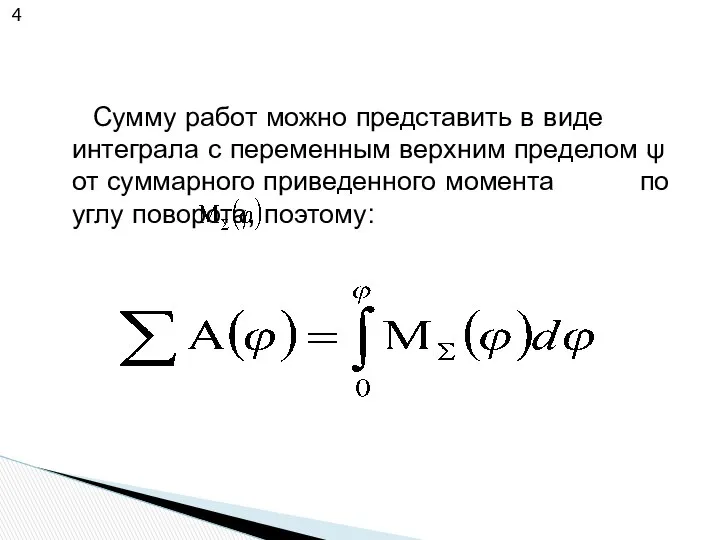
Сумму работ можно представить в виде интеграла с переменным верхним пределом
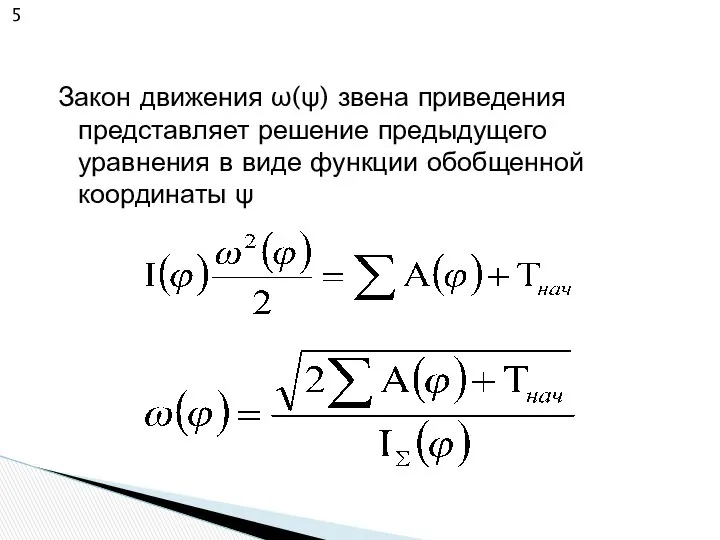
Закон движения ω(ψ) звена приведения представляет решение предыдущего уравнения в виде
Закон движения ω(ψ) звена приведения представляет решение предыдущего уравнения в виде
Продифференцировав выражение суммы работ по координате ψ, получим дифференциальное уравнение движения:
Продифференцировав выражение суммы работ по координате ψ, получим дифференциальное уравнение движения:
Учитывая, что , получаем дифференцированием
угловое ускорение звена приведения
Учитывая, что , получаем дифференцированием
угловое ускорение звена приведения
МА можно представить как одно звено с переменным моментом инерции, в
МА можно представить как одно звено с переменным моментом инерции, в
Свяжем расчетные значения ψ со временем. Проинтегрируем и получим:
При:
Свяжем расчетные значения ψ со временем. Проинтегрируем и получим:
При:
Определение соответствующих моментов времени движения связано с интегрированием обратной функции
Вывод
Определение соответствующих моментов времени движения связано с интегрированием обратной функции
Вывод
 Единая школьная карта
Единая школьная карта Технологии разработки ПО. Основные понятия и определения
Технологии разработки ПО. Основные понятия и определения НОВАЯ ЭКОНОМИЧЕСКАЯ АССОЦИАЦИЯ ВТОРОЙ РОССИЙСКИЙ ЭКОНОМИЧЕСКИЙ КОНГРЕСС БОРЬБА С УКЛОНЕНИЕМ ОТ УПЛАТЫ НАЛОГОВ И «НАЛОГОВЫМИ
НОВАЯ ЭКОНОМИЧЕСКАЯ АССОЦИАЦИЯ ВТОРОЙ РОССИЙСКИЙ ЭКОНОМИЧЕСКИЙ КОНГРЕСС БОРЬБА С УКЛОНЕНИЕМ ОТ УПЛАТЫ НАЛОГОВ И «НАЛОГОВЫМИ  CSS (Cascading Style Sheets)
CSS (Cascading Style Sheets) құндылық
құндылық Мохандас Карамчанд Ганди
Мохандас Карамчанд Ганди «Есть такая профессия – ученик»
«Есть такая профессия – ученик» Реабилитация. Возмещение вреда
Реабилитация. Возмещение вреда Общие сведения о языке программирования Паскаль
Общие сведения о языке программирования Паскаль Заболевания щитовидной железы
Заболевания щитовидной железы Электро Механик
Электро Механик Роспись яиц
Роспись яиц Презентация Социально-обеспечительные правоотношения
Презентация Социально-обеспечительные правоотношения  «TIS-Трудозатраты» Система учета занятости сотрудников. - презентация
«TIS-Трудозатраты» Система учета занятости сотрудников. - презентация умножение и деление на 8 - презентация для начальной школы
умножение и деление на 8 - презентация для начальной школы Web-программирование. Лекция 5. python 3 (часть 2)
Web-программирование. Лекция 5. python 3 (часть 2) Презентация "Макроэкономическая нестабильность и ее основные проявления" - скачать презентации по Экономике
Презентация "Макроэкономическая нестабильность и ее основные проявления" - скачать презентации по Экономике Стратегии тестирования
Стратегии тестирования «Закрепление внетабличного деления и умножения» Математика, 3 класс Учитель начальных классов Симбирева Дарья Викторовна, ГБОУ
«Закрепление внетабличного деления и умножения» Математика, 3 класс Учитель начальных классов Симбирева Дарья Викторовна, ГБОУ  Диаграммы классов. Объектно- ориентированное программирование. (Лекция 5)
Диаграммы классов. Объектно- ориентированное программирование. (Лекция 5) Комплексное оснащение предприятий ресторанного бизнеса на примере овощерезки Robot Coupe CL 50
Комплексное оснащение предприятий ресторанного бизнеса на примере овощерезки Robot Coupe CL 50 Христианская апологетика и история
Христианская апологетика и история Сервис Фото для участников MyWeb Фотохостинг на MyWeb http://myweb.kz/
Сервис Фото для участников MyWeb Фотохостинг на MyWeb http://myweb.kz/ Прогнозирование денежного потока инвестиционного проекта
Прогнозирование денежного потока инвестиционного проекта  Анализ алгоритмов. (Лекция 16)
Анализ алгоритмов. (Лекция 16) The military factor in contemporary international relation
The military factor in contemporary international relation Описание слайда:
Методики определения потребности в лекарственных средствах.
Описание слайда:
Методики определения потребности в лекарственных средствах. ЗАЩИТА АНАЛИТИЧЕСКОГО ОТЧЁТА Юдиной Ирины Николаевны воспитатель ГПД
ЗАЩИТА АНАЛИТИЧЕСКОГО ОТЧЁТА Юдиной Ирины Николаевны воспитатель ГПД