- Основные понятия теории механизмов и машин

Содержание
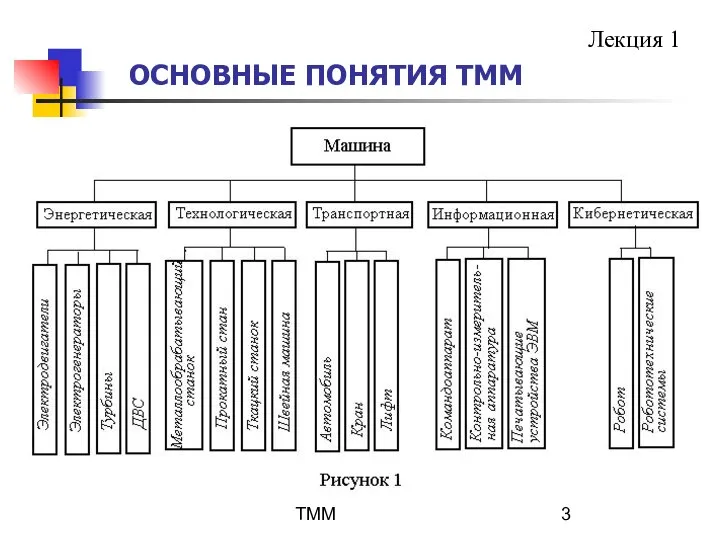
- 2. ТММ ОСНОВНЫЕ ПОНЯТИЯ ТММ Теория механизмов и машин (ТММ) – наука, изучающая общие методы структурного, кинематического
- 3. ТММ ОСНОВНЫЕ ПОНЯТИЯ ТММ Лекция 1
- 4. ТММ ОСНОВНЫЕ ПОНЯТИЯ ТММ Твердое тело, входящее в состав механизма, называется звеном механизма. Под твердыми телами
- 5. ТММ Подвижное соединение двух соприкасающихся звеньев называется кинематической парой. Совокупность поверхностей, линий и отдельных точек звена,
- 6. ТММ Кинематические пары и их классификация Лекция 1 Примеры кинематических пар Рисунок 2 Рисунок 3 Рисунок
- 7. ТММ S и H связаны соотношением: H=6-S. По числу наложенных условий связи (ограничений) на относительные движения
- 8. ТММ Кинематической цепью называется система звеньев, образующих между собой кинематические пары. Все кинематические цепи подразделяются на
- 9. ТММ Механизмы классифицируются по различным признакам, и в первую очередь их делят на механизмы с низшими
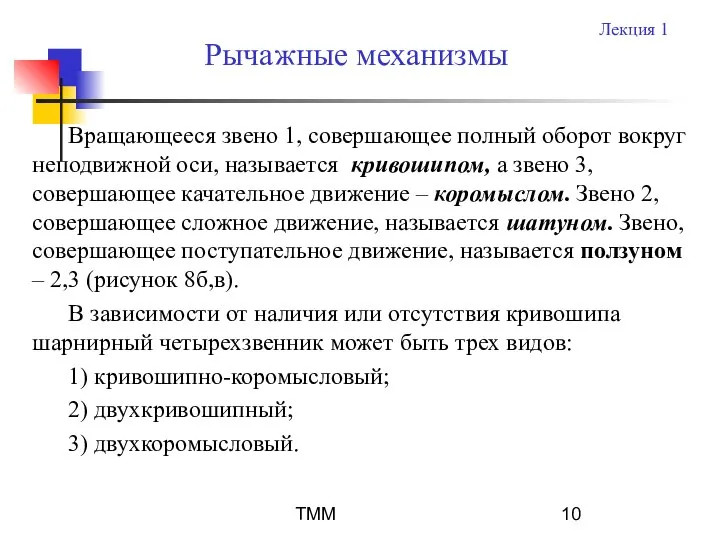
- 10. ТММ Вращающееся звено 1, совершающее полный оборот вокруг неподвижной оси, называется кривошипом, а звено 3, совершающее
- 11. ТММ Условие существования кривошипа в шарнирном четырехзвеннике: 1) кривошип наименьшее звено; 2) сумма длин звеньев наименьшего
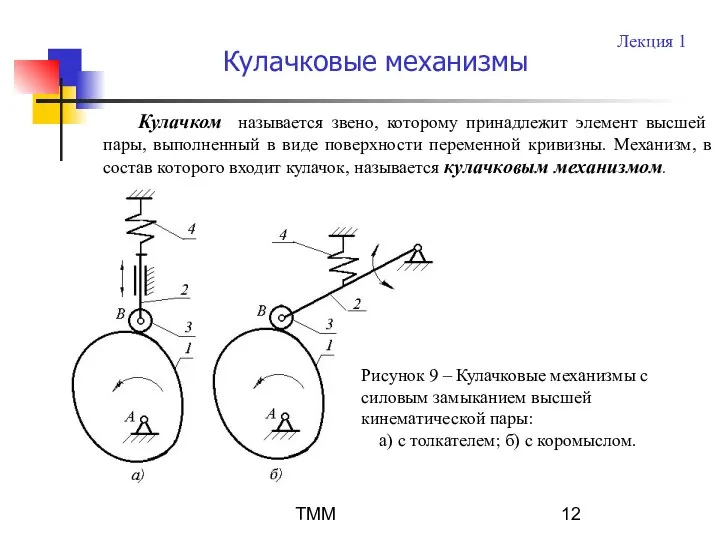
- 12. ТММ Рисунок 9 – Кулачковые механизмы с силовым замыканием высшей кинематической пары: а) с толкателем; б)
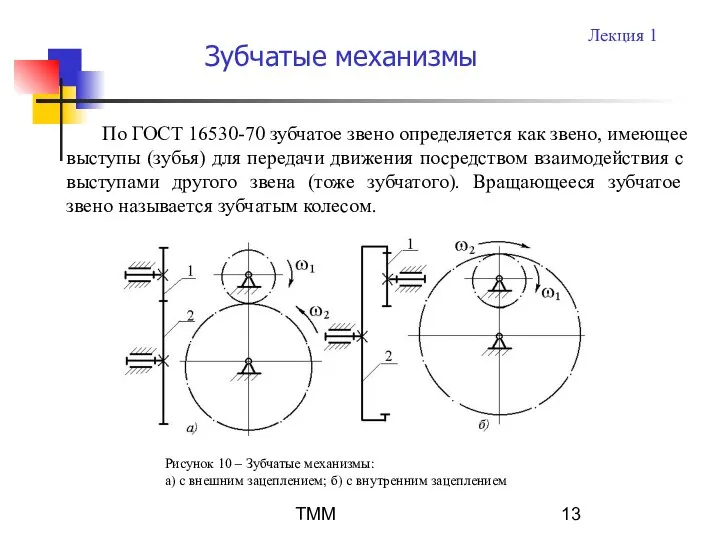
- 13. ТММ По ГОСТ 16530-70 зубчатое звено определяется как звено, имеющее выступы (зубья) для передачи движения посредством
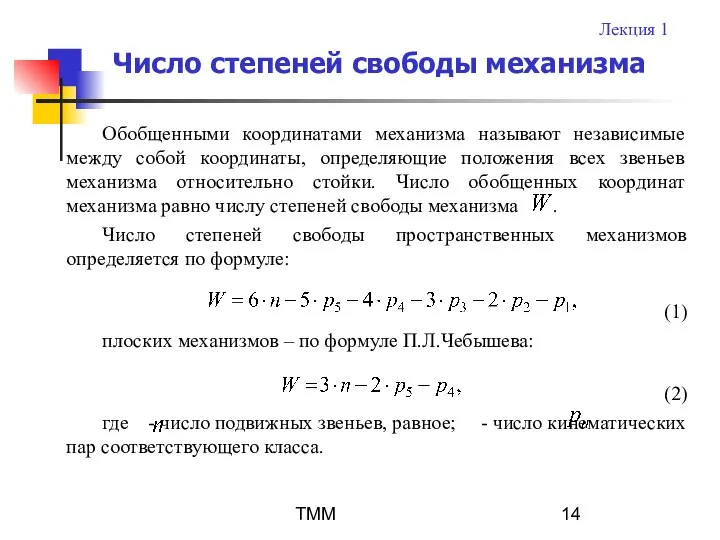
- 14. ТММ Обобщенными координатами механизма называют независимые между собой координаты, определяющие положения всех звеньев механизма относительно стойки.
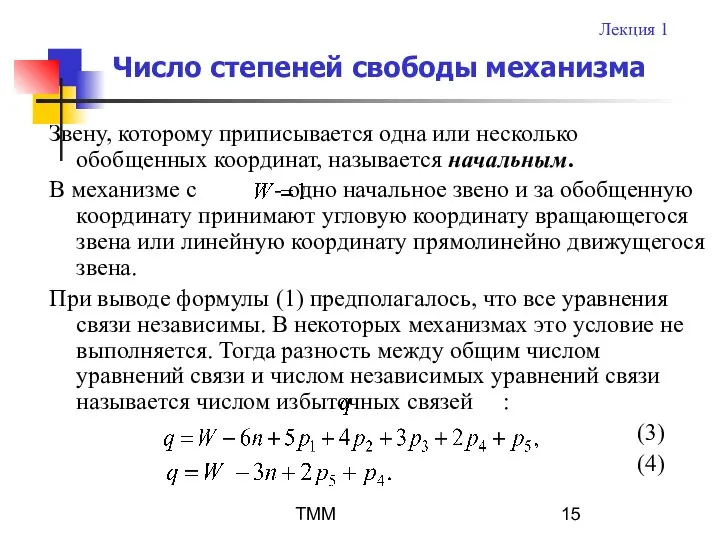
- 15. ТММ Число степеней свободы механизма Звену, которому приписывается одна или несколько обобщенных координат, называется начальным. В
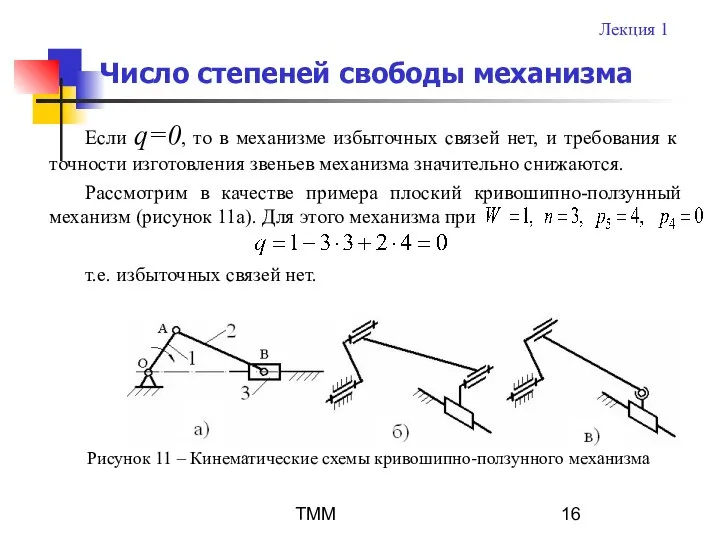
- 16. ТММ Если q=0, то в механизме избыточных связей нет, и требования к точности изготовления звеньев механизма
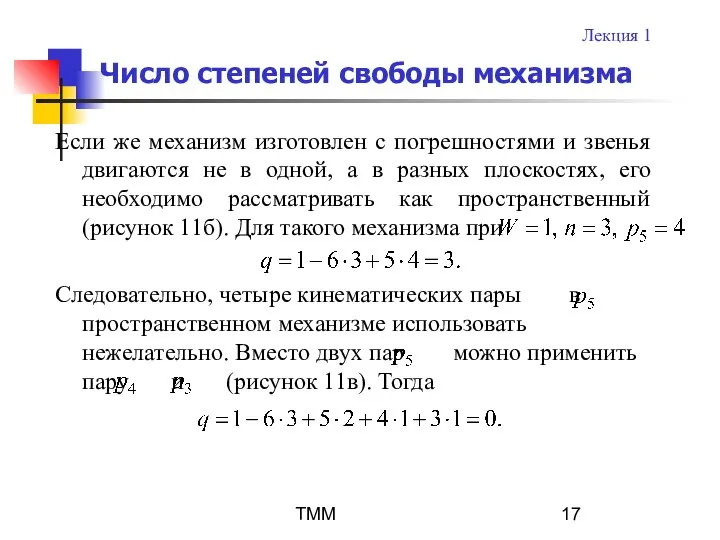
- 17. ТММ Число степеней свободы механизма Если же механизм изготовлен с погрешностями и звенья двигаются не в
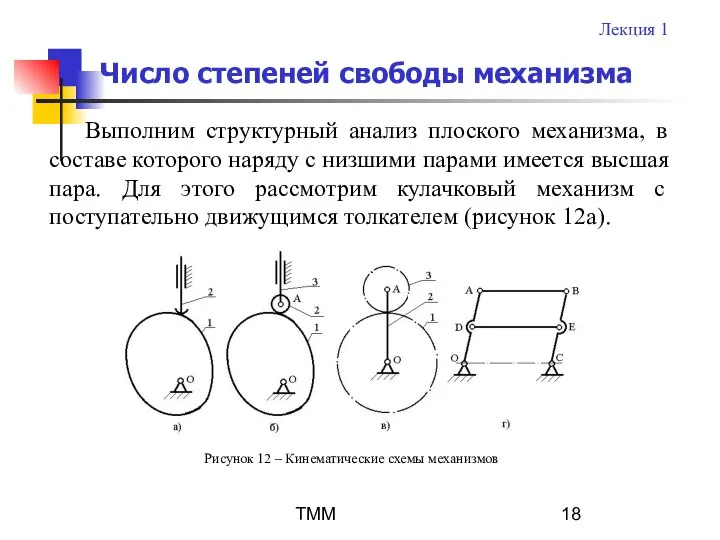
- 18. ТММ Выполним структурный анализ плоского механизма, в составе которого наряду с низшими парами имеется высшая пара.
- 19. ТММ Число степеней свободы механизма определим по формуле (2): Высшая пара образована в месте соприкосновения звеньев
- 20. ТММ В некоторых механизмах, используемых в технике, кроме степеней свободы и связей, активно воздействующих на характер
- 21. ТММ Однако при выполнении соотношений для длин звеньев наличие звена DE не изменит движения шарнирного четырехзвенника
- 22. ТММ Свободно поворачивающийся ролик дает лишнюю степень свободы. Его устанавливают для уменьшения трения между кулачком и
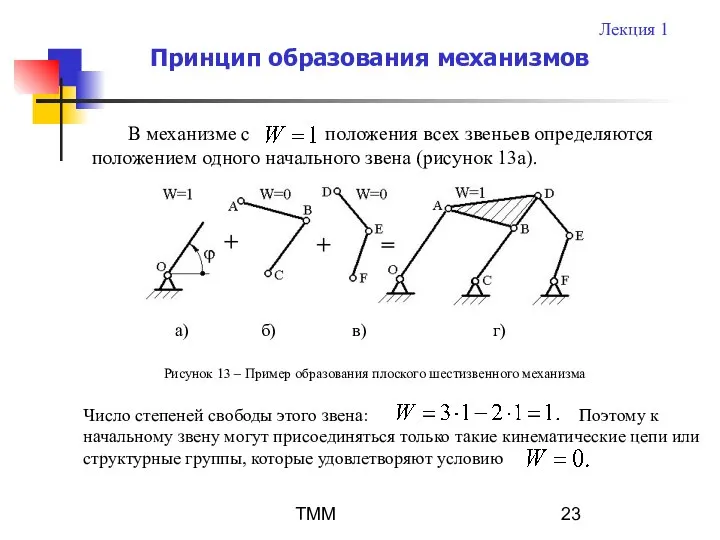
- 23. ТММ В механизме с положения всех звеньев определяются положением одного начального звена (рисунок 13а). Принцип образования
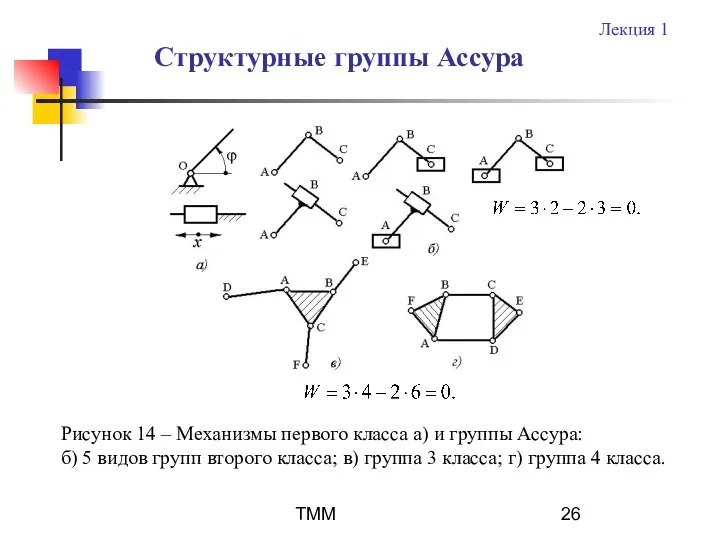
- 24. ТММ Структурную группу с нулевой степенью подвижности называют группой Ассура ( по имени ученого Л.В. Ассура)..
- 25. ТММ Число звеньев n и число низших кинематических пар p5 могут быть только целыми, причем Структурную
- 26. ТММ Рисунок 14 – Механизмы первого класса а) и группы Ассура: б) 5 видов групп второго
- 28. Скачать презентацию
ТММ
ОСНОВНЫЕ ПОНЯТИЯ ТММ
Теория механизмов и машин (ТММ) – наука, изучающая общие
ТММ
ОСНОВНЫЕ ПОНЯТИЯ ТММ
Теория механизмов и машин (ТММ) – наука, изучающая общие
ТММ
ОСНОВНЫЕ ПОНЯТИЯ ТММ
Лекция 1
ТММ
ОСНОВНЫЕ ПОНЯТИЯ ТММ
Лекция 1
ТММ
ОСНОВНЫЕ ПОНЯТИЯ ТММ
Твердое тело, входящее в состав механизма, называется звеном механизма.
ТММ
ОСНОВНЫЕ ПОНЯТИЯ ТММ
Твердое тело, входящее в состав механизма, называется звеном механизма.
ТММ
Подвижное соединение двух соприкасающихся звеньев называется кинематической парой.
Совокупность поверхностей, линий
ТММ
Подвижное соединение двух соприкасающихся звеньев называется кинематической парой.
Совокупность поверхностей, линий
ТММ
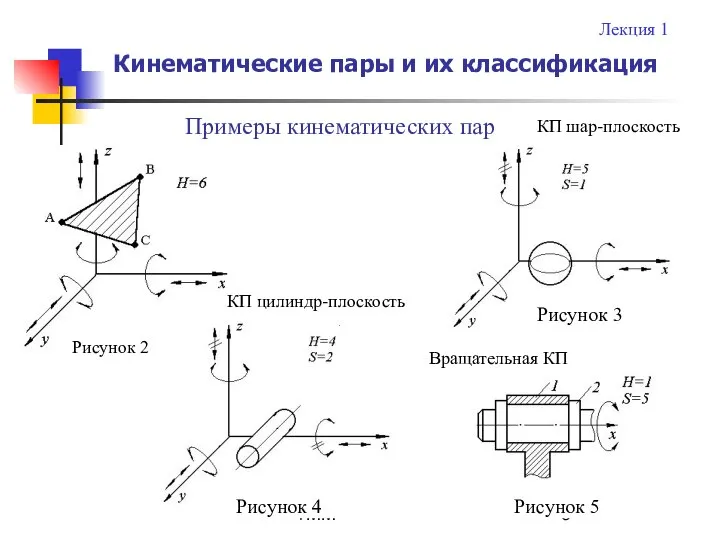
Кинематические пары и их классификация
Лекция 1
Примеры кинематических пар
Рисунок 2
Рисунок 3
Рисунок
ТММ
Кинематические пары и их классификация
Лекция 1
Примеры кинематических пар
Рисунок 2
Рисунок 3
Рисунок
ТММ
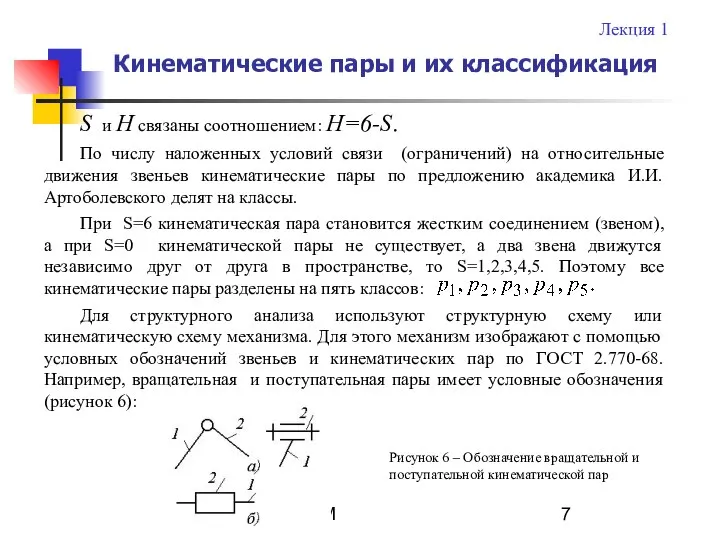
S и H связаны соотношением: H=6-S.
По числу наложенных условий связи (ограничений)
ТММ
S и H связаны соотношением: H=6-S.
По числу наложенных условий связи (ограничений)
ТММ
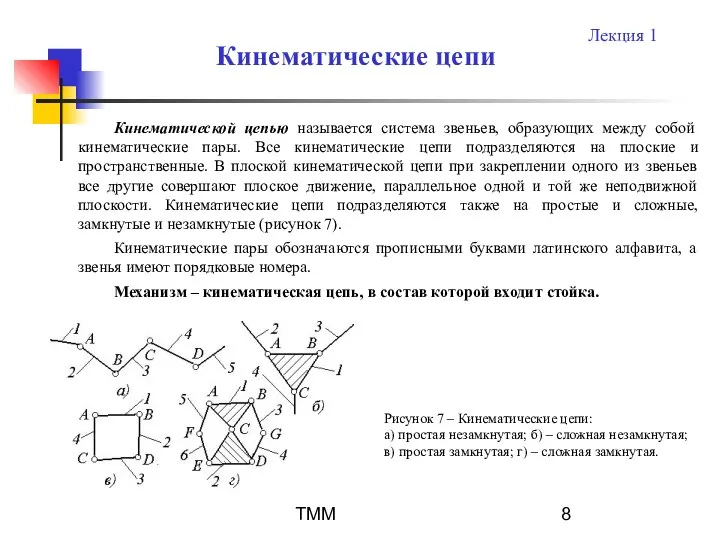
Кинематической цепью называется система звеньев, образующих между собой кинематические пары. Все
ТММ
Кинематической цепью называется система звеньев, образующих между собой кинематические пары. Все
ТММ
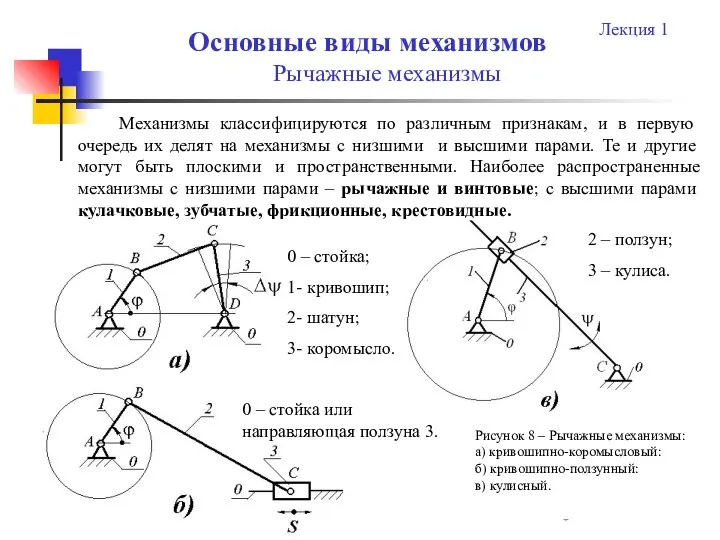
Механизмы классифицируются по различным признакам, и в первую очередь их
ТММ
Механизмы классифицируются по различным признакам, и в первую очередь их
ТММ
Вращающееся звено 1, совершающее полный оборот вокруг неподвижной оси, называется кривошипом,
ТММ
Вращающееся звено 1, совершающее полный оборот вокруг неподвижной оси, называется кривошипом,
ТММ
Условие существования кривошипа в шарнирном четырехзвеннике:
1) кривошип наименьшее звено;
2) сумма
ТММ
Условие существования кривошипа в шарнирном четырехзвеннике:
1) кривошип наименьшее звено;
2) сумма
ТММ
Рисунок 9 – Кулачковые механизмы с силовым замыканием высшей кинематической пары:
ТММ
Рисунок 9 – Кулачковые механизмы с силовым замыканием высшей кинематической пары:
ТММ
По ГОСТ 16530-70 зубчатое звено определяется как звено, имеющее выступы (зубья)
ТММ
По ГОСТ 16530-70 зубчатое звено определяется как звено, имеющее выступы (зубья)
ТММ
Обобщенными координатами механизма называют независимые между собой координаты, определяющие положения всех
ТММ
Обобщенными координатами механизма называют независимые между собой координаты, определяющие положения всех
ТММ
Число степеней свободы механизма
Звену, которому приписывается одна или несколько обобщенных координат,
ТММ
Число степеней свободы механизма
Звену, которому приписывается одна или несколько обобщенных координат,
ТММ
Если q=0, то в механизме избыточных связей нет, и требования к
ТММ
Если q=0, то в механизме избыточных связей нет, и требования к
ТММ
Число степеней свободы механизма
Если же механизм изготовлен с погрешностями и звенья
ТММ
Число степеней свободы механизма
Если же механизм изготовлен с погрешностями и звенья
ТММ
Выполним структурный анализ плоского механизма, в составе которого наряду с низшими
ТММ
Выполним структурный анализ плоского механизма, в составе которого наряду с низшими
ТММ
Число степеней свободы механизма определим по формуле (2):
Высшая пара образована в
ТММ
Число степеней свободы механизма определим по формуле (2):
Высшая пара образована в
ТММ
В некоторых механизмах, используемых в технике, кроме степеней свободы и связей,
ТММ
В некоторых механизмах, используемых в технике, кроме степеней свободы и связей,
ТММ
Однако при выполнении соотношений для длин звеньев наличие звена DE не
ТММ
Однако при выполнении соотношений для длин звеньев наличие звена DE не
ТММ
Свободно поворачивающийся ролик дает лишнюю степень свободы. Его устанавливают для уменьшения
ТММ
Свободно поворачивающийся ролик дает лишнюю степень свободы. Его устанавливают для уменьшения
ТММ
В механизме с положения всех звеньев определяются положением одного начального звена
ТММ
В механизме с положения всех звеньев определяются положением одного начального звена
ТММ
Структурную группу с нулевой степенью подвижности называют группой Ассура (
ТММ
Структурную группу с нулевой степенью подвижности называют группой Ассура (
ТММ
Число звеньев n и число низших кинематических пар p5 могут быть
ТММ
Число звеньев n и число низших кинематических пар p5 могут быть
ТММ
Рисунок 14 – Механизмы первого класса а) и группы Ассура:
б) 5
ТММ
Рисунок 14 – Механизмы первого класса а) и группы Ассура:
б) 5
 ОСОБЕННОСТЬ СТОМАТОЛОГИЧЕСКОГО СТАТУСА У ДЕТЕЙ ДОШКОЛЬНОГО ВОЗРАСТА
ОСОБЕННОСТЬ СТОМАТОЛОГИЧЕСКОГО СТАТУСА У ДЕТЕЙ ДОШКОЛЬНОГО ВОЗРАСТА  Что такое URL
Что такое URL Научно за българския език ПРИЛОЖЕНО В РЕАЛНИЯ ЖИВОТ За добро настроение и поука – Галя Атанасова. - презентация
Научно за българския език ПРИЛОЖЕНО В РЕАЛНИЯ ЖИВОТ За добро настроение и поука – Галя Атанасова. - презентация Инструментальные средства информационных технологий
Инструментальные средства информационных технологий Лекция 5 Промежуточные товарные углеводородные продукты
Лекция 5 Промежуточные товарные углеводородные продукты html
html Поверхности. Основные понятия и определения
Поверхности. Основные понятия и определения Конфликтность
Конфликтность Однопроходные алгоритмы
Однопроходные алгоритмы Культурно-исторические типы языка. Различные пути образования национальных языков
Культурно-исторические типы языка. Различные пути образования национальных языков ФАС и ее функции в системе размещения заказов
ФАС и ее функции в системе размещения заказов Марвел. Игра
Марвел. Игра Задача Товары в некомплектном и незавершенном виде Терешкова М. ДС5 ФТД5 _
Задача Товары в некомплектном и незавершенном виде Терешкова М. ДС5 ФТД5 _ Презентация Функции нотариата
Презентация Функции нотариата Презентация на тему "Обособление согласованных определений" - скачать презентации по Педагогике
Презентация на тему "Обособление согласованных определений" - скачать презентации по Педагогике Языки программирования QBasic и Turbo Pascal 7.0
Языки программирования QBasic и Turbo Pascal 7.0 Гражданин РФ
Гражданин РФ О направлениях совершенствования оценки деятельности вузов
О направлениях совершенствования оценки деятельности вузов  Чернігівська область
Чернігівська область Номенклатура справ
Номенклатура справ Системы управления контентом CMS (08)
Системы управления контентом CMS (08) c Метрология, погрешность измерений
c Метрология, погрешность измерений 国际市场计划
国际市场计划 Программирование линейных алгоритмов на языке Паскаль
Программирование линейных алгоритмов на языке Паскаль Презентация на тему "Проект - это" - скачать презентации по Педагогике
Презентация на тему "Проект - это" - скачать презентации по Педагогике Fuel normal operation
Fuel normal operation Дагестан. Даргинцы
Дагестан. Даргинцы Ашаршылықтың екі түрі бар
Ашаршылықтың екі түрі бар