- Приоритетное обслуживание

Содержание
- 2. Для упрощения этой задачи основное внимание будет уделено определению среднего времени ожидания, а не времени задержки.
- 3. Для этого разберем, из каких компонентов складывается Tож. Очевидно, что сюда входят: время T0 необходимое для
- 4. Для оценки М(Тк) допустим, что среднее число ожидающих сообщений с приоритетом к составляет М(тк). Если каждое
- 5. По аналогии M(Тк 1 )=ρk M (Tож)p Можно показать, что время ожидания для сообщений с приоритетом
- 6. Определим теперь величину времени M(T0), необходимого для завершения текущего обслуживания. Рассмотрим сначала систему обслуживания MIGI1 с
- 7. Система обслуживания MIMINIm Пусть на СМО MIMINIm с числом обслуживающих приборов N и числом мест для
- 9. система обслуживает s требований с интенсивностью sμ, если 0 система ставит требование в очередь, если число
- 10. Математический аппарат ТМО охватывает широкий класс СМО с простейшими, примитивными и рекуррентными потоками и может быть
- 11. Системы массового обслуживания с отказами Рассмотрим задачу построения модели и анализа вероятностно-временных характеристик СМО с отказами
- 13. Как видно из рисунка, СМО может находиться в одном из следующих состояний: все приборы свободны, заявок
- 14. Данная система уравнений описывает вероятностный механизм смены состояний марковского процесса гибели и размножения: (33) где Pn(t)
- 15. Для установившегося режима работы СМО справедливы условия dpn(t)ldt = 0, λ/μ В этом случае финальные вероятности,
- 16. На основе этого выражения может быть определена вероятность отказа, т. е. вероятность того, что все N
- 17. Основные сведение о языке GPSS Язык имитационного моделирования GPSS (General Purpose System Simulator) разработан в 1961
- 18. GPSS составлен из объектов и операций (логических правил). Объекты делятся на семь классов. Динамические объекты (ДО)
- 19. Чтобы смоделировать систему, необходимо составить ее описание в терминах GPSS. Затем симулятор генерирует транзакты, продвигает их
- 20. Программа на GPSS создается в текстовом редакторе в определенном формате. Формат ввода содержит 3 различные поля:
- 21. Динамические объекты GPSS. Транзактно-ориентированные блоки В системах массового обслуживания транзакт - это динамический объект, соответствующий заявке
- 22. Значения интервалов в единицах модельного времени задает целая константа в поле А. Следует иметь в виду,
- 23. S=1/λ – математическое ожидание, A>=B, S=2Bh, h=1/(2B)
- 24. Оператор ADVANCE. В процессе движения транзактов по модели в определенных точках может возникать необходимость задержки транзактов
- 25. Оператор TERMINATE. Начав свой путь на выходе блока GENERATE и пройдя то число операционных блоков GPSS-модели,
- 26. Аппаратно-ориентированные блоки Аппаратно-ориентированные блоки (операторы) описывают действия по занятию и освобождению ресурсов (каналов обслуживания) с образованием
- 27. Если в течение некоторого интервала модельного времени несколько транзактов пытаются войти в блок SEIZE, то организуется
- 28. Пример. Требуется построить имитационную модель одноканальной СМО с чистым ожиданием (рис. 11.3). Реальным объектом моделирования является,
- 29. Интенсивность поступления транзактов (запросов) в очередь λ=20 с -1, интенсивность обслуживания μ = 40 с-1, коэффициент
- 30. Масштаб (единица модельного времени) моделирования Δt= 1 мс. На рис. 11.5 приведена блок-диаграмма ИМ.
- 31. Общее время моделирования (в единицах модельного времени) запишется как TLIM = N/(λΔt) = 1000/(20*10-3) = 50*103,
- 32. Многоканальное обслуживание Для моделирования многоканального обслуживания в GPSS используются специальные объекты, называемые накопителями. Моделирование параллельно работающих
- 33. Для фиксации входа транзакта в память применяется блок ENTER , в поле А которого указывается имя
- 35. Скачать презентацию
Для упрощения этой задачи основное внимание будет уделено определению среднего времени
Для упрощения этой задачи основное внимание будет уделено определению среднего времени
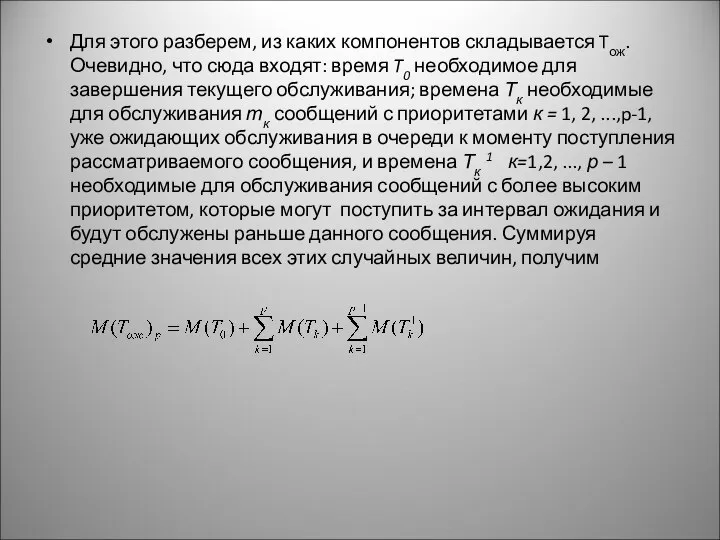
Для этого разберем, из каких компонентов складывается Tож. Очевидно, что сюда
Для этого разберем, из каких компонентов складывается Tож. Очевидно, что сюда
Для оценки М(Тк) допустим, что среднее число ожидающих сообщений с приоритетом
Для оценки М(Тк) допустим, что среднее число ожидающих сообщений с приоритетом
По аналогии
M(Тк 1 )=ρk M (Tож)p
Можно показать, что время ожидания
По аналогии
M(Тк 1 )=ρk M (Tож)p
Можно показать, что время ожидания
Определим теперь величину времени M(T0), необходимого для завершения текущего обслуживания. Рассмотрим
Определим теперь величину времени M(T0), необходимого для завершения текущего обслуживания. Рассмотрим
Система обслуживания MIMINIm
Пусть на СМО MIMINIm с числом обслуживающих приборов N
Система обслуживания MIMINIm
Пусть на СМО MIMINIm с числом обслуживающих приборов N
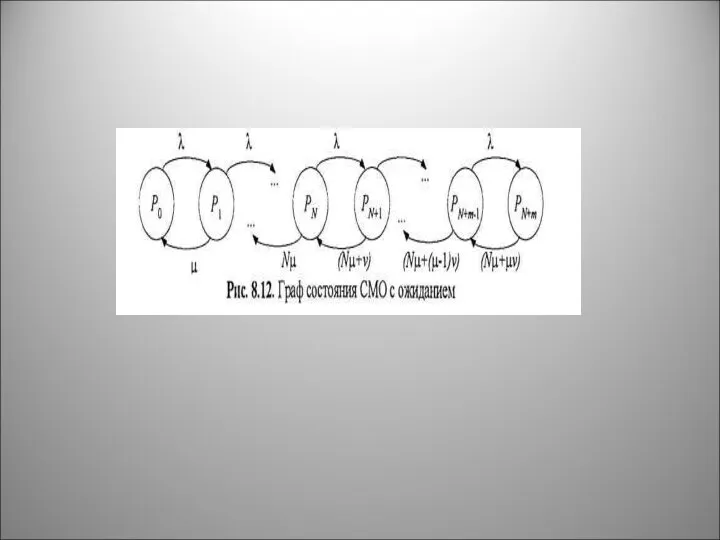
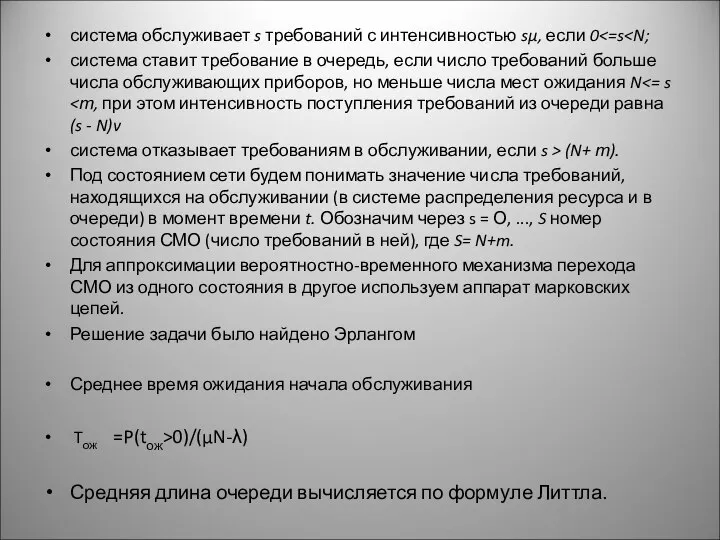
система обслуживает s требований с интенсивностью sμ, если 0<=sсистема ставит требование
система обслуживает s требований с интенсивностью sμ, если 0<=s
Математический аппарат ТМО охватывает широкий класс СМО с простейшими, примитивными и
Математический аппарат ТМО охватывает широкий класс СМО с простейшими, примитивными и
Системы массового обслуживания с отказами
Рассмотрим задачу построения модели и анализа вероятностно-временных
Системы массового обслуживания с отказами
Рассмотрим задачу построения модели и анализа вероятностно-временных
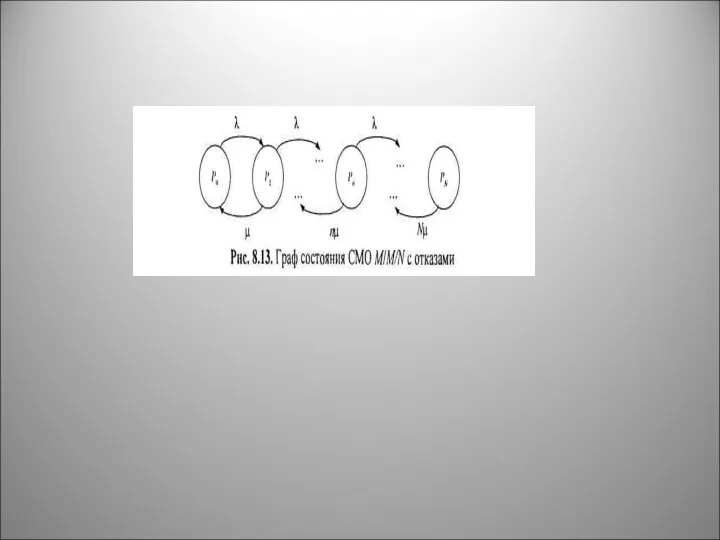
Как видно из рисунка, СМО может находиться в одном из следующих
Как видно из рисунка, СМО может находиться в одном из следующих
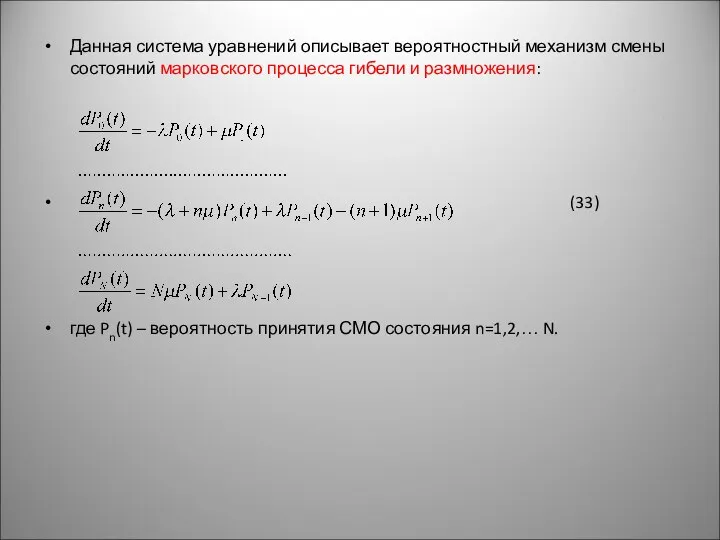
Данная система уравнений описывает вероятностный механизм смены состояний марковского процесса гибели
Данная система уравнений описывает вероятностный механизм смены состояний марковского процесса гибели
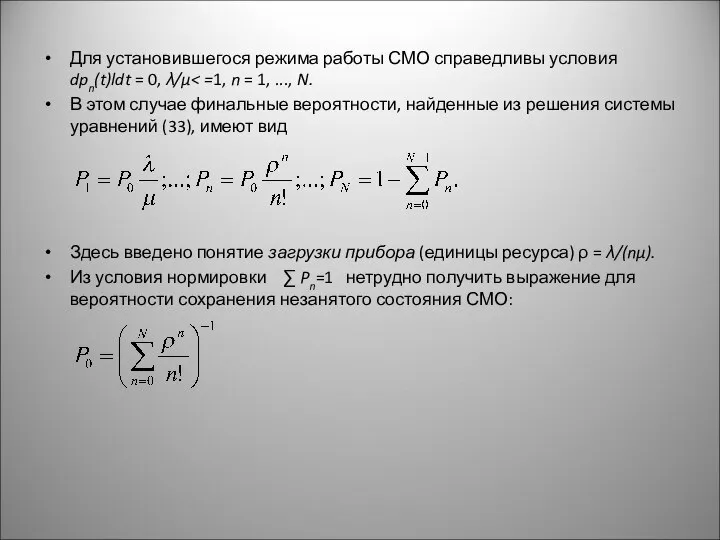
Для установившегося режима работы СМО справедливы условия dpn(t)ldt = 0, λ/μ<
Для установившегося режима работы СМО справедливы условия dpn(t)ldt = 0, λ/μ<
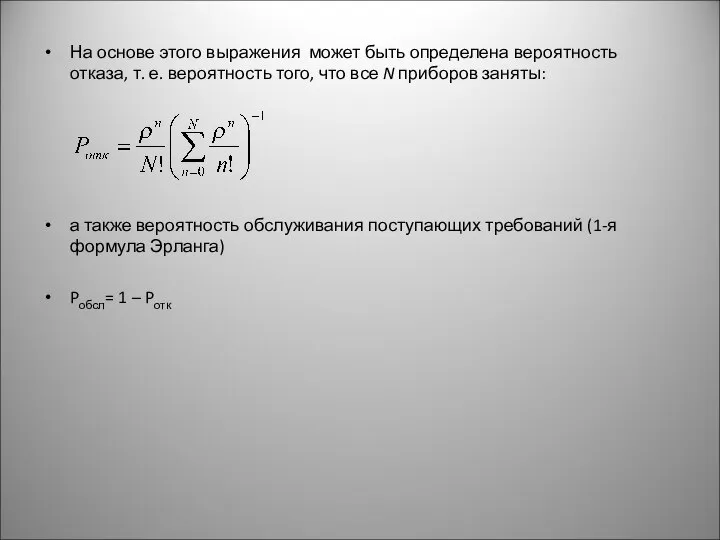
На основе этого выражения может быть определена вероятность отказа, т. е.
На основе этого выражения может быть определена вероятность отказа, т. е.
Основные сведение о языке GPSS
Язык имитационного моделирования GPSS (General Purpose System
Основные сведение о языке GPSS
Язык имитационного моделирования GPSS (General Purpose System
GPSS составлен из объектов и операций (логических правил). Объекты делятся на
GPSS составлен из объектов и операций (логических правил). Объекты делятся на
Чтобы смоделировать систему, необходимо составить ее описание в терминах GPSS. Затем
Чтобы смоделировать систему, необходимо составить ее описание в терминах GPSS. Затем
Программа на GPSS создается в текстовом редакторе в определенном формате. Формат
Программа на GPSS создается в текстовом редакторе в определенном формате. Формат
Динамические объекты GPSS. Транзактно-ориентированные блоки
В системах массового обслуживания транзакт - это
Динамические объекты GPSS. Транзактно-ориентированные блоки
В системах массового обслуживания транзакт - это
Значения интервалов в единицах модельного времени задает целая константа в поле
Значения интервалов в единицах модельного времени задает целая константа в поле
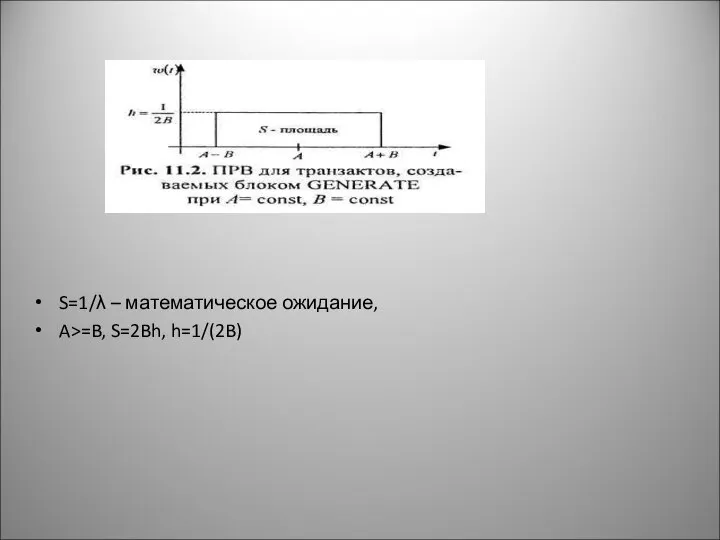
S=1/λ – математическое ожидание,
A>=B, S=2Bh, h=1/(2B)
S=1/λ – математическое ожидание,
A>=B, S=2Bh, h=1/(2B)
Оператор ADVANCE. В процессе движения транзактов по модели в определенных точках
Оператор ADVANCE. В процессе движения транзактов по модели в определенных точках
Оператор TERMINATE. Начав свой путь на выходе блока GENERATE и пройдя
Оператор TERMINATE. Начав свой путь на выходе блока GENERATE и пройдя
Аппаратно-ориентированные блоки
Аппаратно-ориентированные блоки (операторы) описывают действия по занятию и освобождению ресурсов
Аппаратно-ориентированные блоки
Аппаратно-ориентированные блоки (операторы) описывают действия по занятию и освобождению ресурсов
Если в течение некоторого интервала модельного времени несколько транзактов пытаются войти
Если в течение некоторого интервала модельного времени несколько транзактов пытаются войти
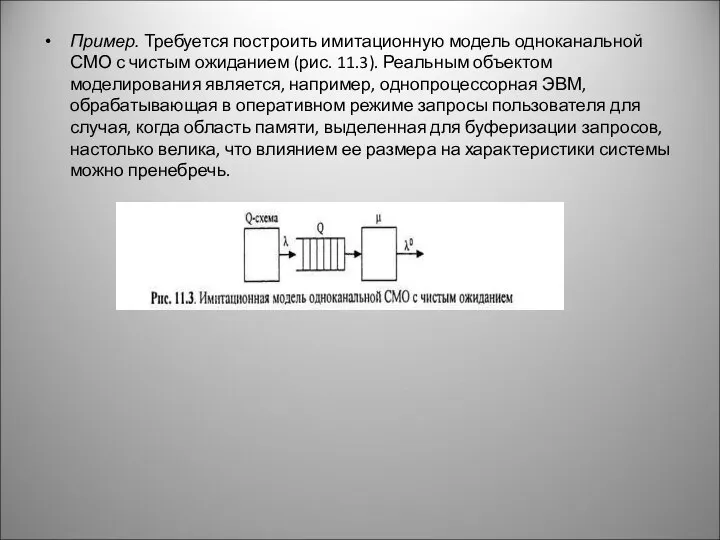
Пример. Требуется построить имитационную модель одноканальной СМО с чистым ожиданием (рис.
Пример. Требуется построить имитационную модель одноканальной СМО с чистым ожиданием (рис.
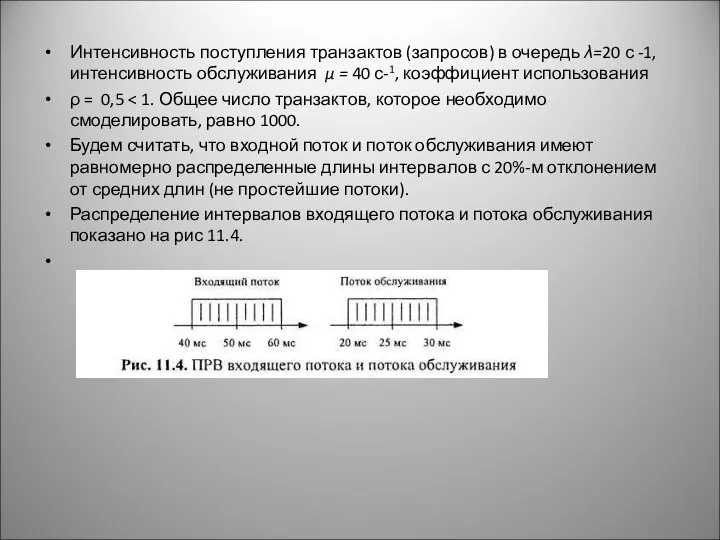
Интенсивность поступления транзактов (запросов) в очередь λ=20 с -1, интенсивность обслуживания
Интенсивность поступления транзактов (запросов) в очередь λ=20 с -1, интенсивность обслуживания
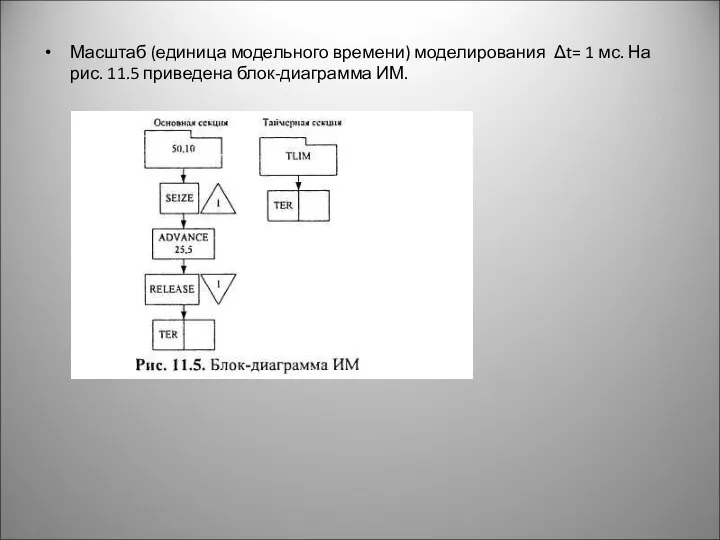
Масштаб (единица модельного времени) моделирования Δt= 1 мс. На рис. 11.5
Масштаб (единица модельного времени) моделирования Δt= 1 мс. На рис. 11.5
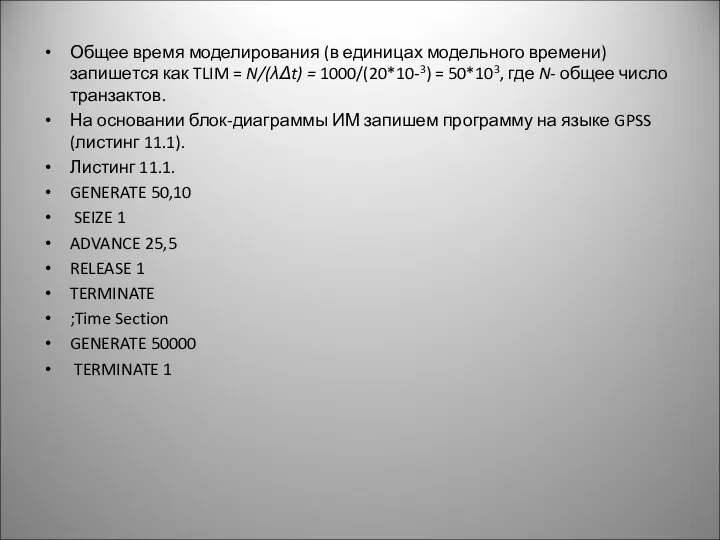
Общее время моделирования (в единицах модельного времени) запишется как TLIM =
Общее время моделирования (в единицах модельного времени) запишется как TLIM =
Многоканальное обслуживание
Для моделирования многоканального обслуживания в GPSS используются специальные объекты, называемые
Многоканальное обслуживание
Для моделирования многоканального обслуживания в GPSS используются специальные объекты, называемые
Для фиксации входа транзакта в память применяется блок ENTER , в
Для фиксации входа транзакта в память применяется блок ENTER , в
 Космические тропинки - презентация для начальной школы_
Космические тропинки - презентация для начальной школы_ Черная металлургия России (9 класс)
Черная металлургия России (9 класс) Интернет и его ресурсы: Паутинные байты
Интернет и его ресурсы: Паутинные байты Начало работы с SAP UI5
Начало работы с SAP UI5 Вебинары. Похудание
Вебинары. Похудание модуль онлайн
модуль онлайн Программирование на ФОРТРАНЕ
Программирование на ФОРТРАНЕ  Особенности программирования на объектно-ориентированных языках
Особенности программирования на объектно-ориентированных языках УРАВНЕНИЯ И НЕРАВЕНСТВА С ДВУМЯ ПЕРЕМЕННЫМИ
УРАВНЕНИЯ И НЕРАВЕНСТВА С ДВУМЯ ПЕРЕМЕННЫМИ История бисера
История бисера Лекция 2. Основы программной инженерии. Основные этапы разработки программ, их назначение и характеристики
Лекция 2. Основы программной инженерии. Основные этапы разработки программ, их назначение и характеристики Апостолы евангелисты
Апостолы евангелисты Управленческая решетка ГРИД
Управленческая решетка ГРИД  Презентация на тему "Разработка и внедрение методов долгосрочного прогноза научно-технологического развития в области молекул
Презентация на тему "Разработка и внедрение методов долгосрочного прогноза научно-технологического развития в области молекул Аппаратное обеспечение для персонального компьютера
Аппаратное обеспечение для персонального компьютера Конкурс «ВСЕЗНАЙКИ» 4 КЛАСС Замаенко Елена Васильевна, учитель-методист УВОК№110 г.Запорожья Категория высшая
Конкурс «ВСЕЗНАЙКИ» 4 КЛАСС Замаенко Елена Васильевна, учитель-методист УВОК№110 г.Запорожья Категория высшая  Святые мученицы Вера , Надежда , Любовь и матерь их София
Святые мученицы Вера , Надежда , Любовь и матерь их София Пасха
Пасха Межправительственная рабочая группа экспертов по международным стандартам учета и отчетности ( МСУО). Налоговые органы
Межправительственная рабочая группа экспертов по международным стандартам учета и отчетности ( МСУО). Налоговые органы День народного единства
День народного единства НОВОГОДНИЙ ПРАЗДНИК «Сладкая сказка»
НОВОГОДНИЙ ПРАЗДНИК «Сладкая сказка» Физиотерапевтические средства: дозирование, ошибки назначения, рецептура к.м.н., с.н.с. Жук Д.Д.
Физиотерапевтические средства: дозирование, ошибки назначения, рецептура к.м.н., с.н.с. Жук Д.Д.  Модуляция в системах связи
Модуляция в системах связи Презентация на тему "Антибиотики в нашей пище" - скачать презентации по Медицине
Презентация на тему "Антибиотики в нашей пище" - скачать презентации по Медицине Механизм құрылымы
Механизм құрылымы Общие данные для проектирования
Общие данные для проектирования Организация и порядок проведения экспертизы
Организация и порядок проведения экспертизы  Разработка демонстрационного стенда: система охлаждения ПК
Разработка демонстрационного стенда: система охлаждения ПК