- Р1_1

Содержание
- 2. тело, относительного которого задается или определяется положение выбранного тела Основная задача механики состоит в определении положения
- 3. Способы описания и задания движения точки. Координатный способ Проекции точки на координатные оси
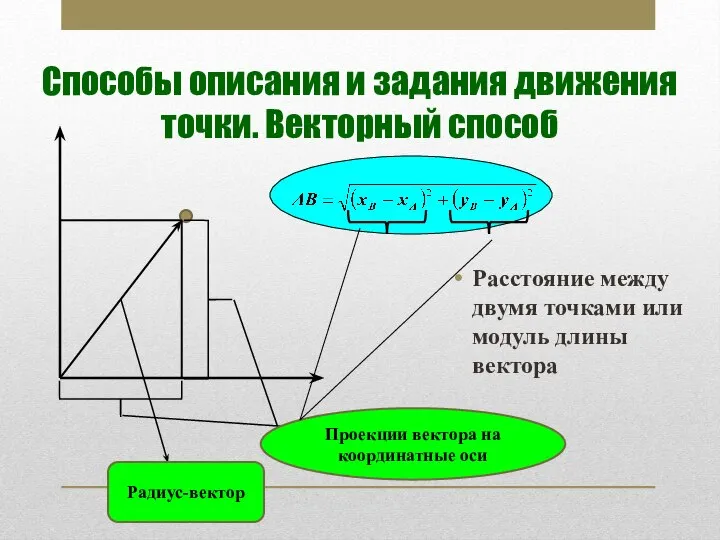
- 4. Способы описания и задания движения точки. Векторный способ Радиус-вектор Проекции вектора на координатные оси Расстояние между
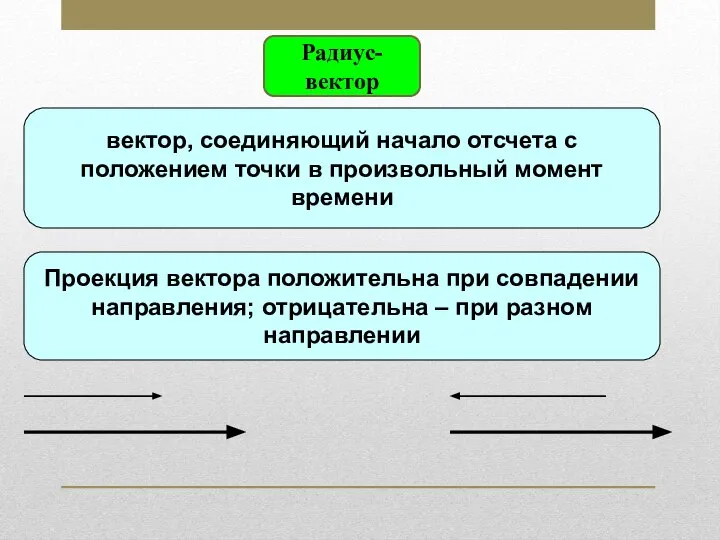
- 5. Радиус-вектор вектор, соединяющий начало отсчета с положением точки в произвольный момент времени Проекция вектора положительна при
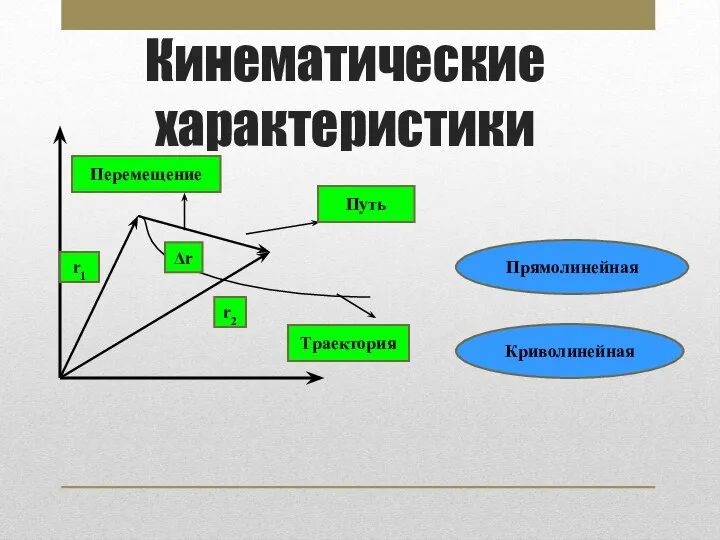
- 6. Кинематические характеристики r1 r2 Δr Прямолинейная Криволинейная
- 8. Скачать презентацию
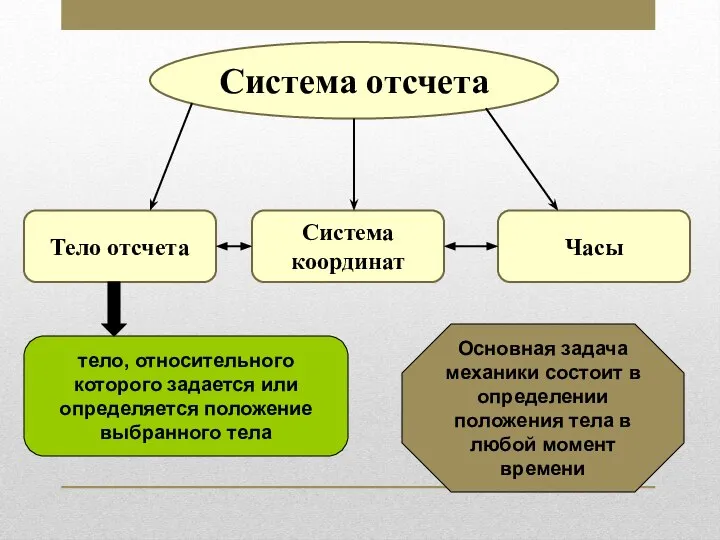
тело, относительного которого задается или определяется положение выбранного тела
Основная задача механики
тело, относительного которого задается или определяется положение выбранного тела
Основная задача механики

Способы описания и задания движения точки. Координатный способ
Проекции точки на координатные
Способы описания и задания движения точки. Координатный способ
Проекции точки на координатные
Способы описания и задания движения точки. Векторный способ
Радиус-вектор
Проекции вектора на координатные
Способы описания и задания движения точки. Векторный способ
Радиус-вектор
Проекции вектора на координатные
Радиус-вектор
вектор, соединяющий начало отсчета с положением точки в произвольный момент времени
Радиус-вектор
вектор, соединяющий начало отсчета с положением точки в произвольный момент времени
Кинематические характеристики
r1
r2
Δr
Прямолинейная
Криволинейная
Кинематические характеристики
r1
r2
Δr
Прямолинейная
Криволинейная
 Terroryzm po drugiej wojnie swiatowej
Terroryzm po drugiej wojnie swiatowej Запорожье. Бердянск вчера и сегодня. - презентация
Запорожье. Бердянск вчера и сегодня. - презентация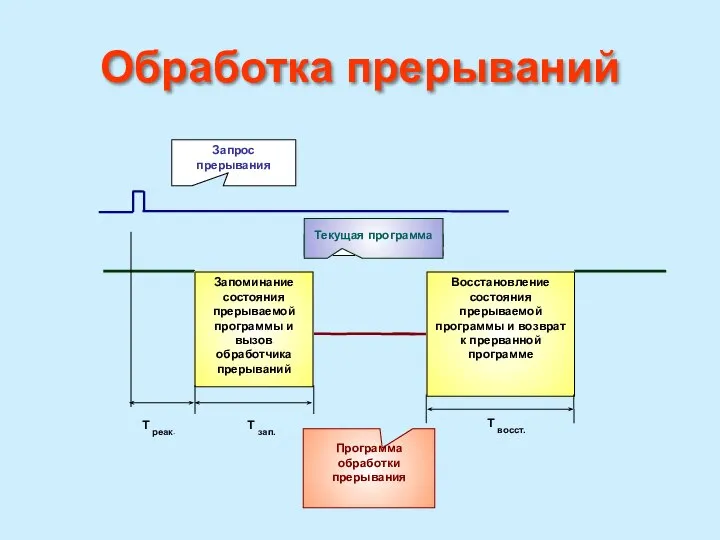 Прерывания
Прерывания LG Group («Life is Good», элджи груп) – тұрмыстық электроника
LG Group («Life is Good», элджи груп) – тұрмыстық электроника Характеристика элементов Na и K
Характеристика элементов Na и K Разъединители. Классификация разъединителей
Разъединители. Классификация разъединителей Роль краеведения в воспитании патриотизма и гражданственности Учитель истории и обществознания Проскурякова Ф.А.
Роль краеведения в воспитании патриотизма и гражданственности Учитель истории и обществознания Проскурякова Ф.А.  Тип Плоские черви Plathelminthes
Тип Плоские черви Plathelminthes М. М. Пришвин. «Изобретатель» - презентация для начальной школы_
М. М. Пришвин. «Изобретатель» - презентация для начальной школы_ WritingFS4Fun
WritingFS4Fun Загальні правила підбору посуду та подачі чаю
Загальні правила підбору посуду та подачі чаю Noţiunea, obiectul şi sistemul dreptului ecologic
Noţiunea, obiectul şi sistemul dreptului ecologic Informatika2.ppt
Informatika2.ppt ТМД елдеріндегі саяси режим турлері
ТМД елдеріндегі саяси режим турлері Проектирование участка механического цеха для производства детали крышка НПРК 711154.013
Проектирование участка механического цеха для производства детали крышка НПРК 711154.013 Компоновка
Компоновка ДИДАКТИКА СОВРЕМЕННОГО УРОКА
ДИДАКТИКА СОВРЕМЕННОГО УРОКА Образец характеристики учащегося Характеристика учащегося ГБОУ СОШ № 512 ФИО, __________________________ уч-ся ___ класса, ______ года рождения, п
Образец характеристики учащегося Характеристика учащегося ГБОУ СОШ № 512 ФИО, __________________________ уч-ся ___ класса, ______ года рождения, п lection_3_IDO.ppt
lection_3_IDO.ppt Исследовательская работа по физической культуре. Плавание
Исследовательская работа по физической культуре. Плавание Цифровые компьютеры
Цифровые компьютеры Перевоплощения. (переселение душ, инкарнация, реинкарнация)
Перевоплощения. (переселение душ, инкарнация, реинкарнация) Домалау мойынтіректері
Домалау мойынтіректері Взаимоотношения между Россией и Великобританией
Взаимоотношения между Россией и Великобританией Тема: « Звук [Й] и его обозначение буквой Й. Повторение и закрепление пройденного материала»
Тема: « Звук [Й] и его обозначение буквой Й. Повторение и закрепление пройденного материала» Safety rules for operation of wells
Safety rules for operation of wells Первые русские православные патриархи
Первые русские православные патриархи Развитие скоростно-силовых качеств на уроках баскетбола
Развитие скоростно-силовых качеств на уроках баскетбола