- Шина Can, управления электрическими устройствами автомобиля

Содержание
- 2. Электрические цепи автомобилей усложнялись и разрастались год от года. Первые автомобили обходились без генератора и аккумулятора
- 3. CAN-шина - это система цифровой связи и управления электрическими устройствами автомобиля, позволяющая собирать данные от всех
- 5. Если данные передаются по двум проводам (т.н. “витая пара”) последовательно, импульс за импульсом – это будет
- 7. Правила, по которым отдельные блоки обмениваются информацией, в электронике называются протоколом . Протокол позволяет посылать отдельным
- 9. Обмен информацией идет в обоих направлениях, т.е. можно не только включить например лампочку заднего хода, но
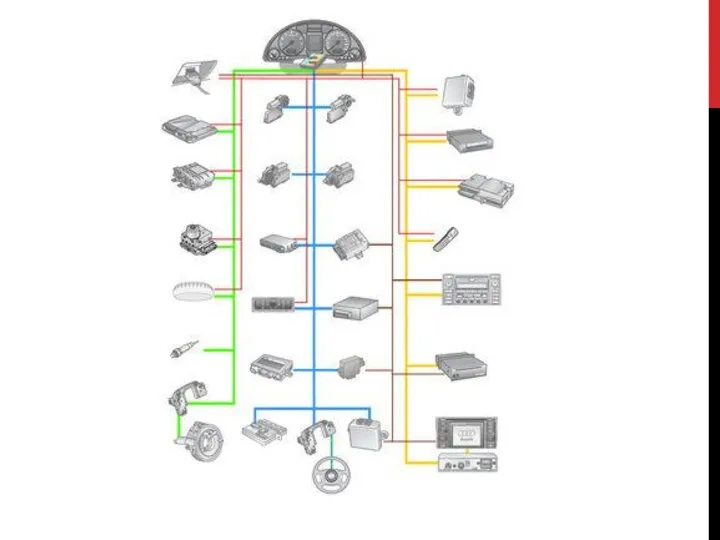
- 10. CAN-шины современного автомобиля
- 11. Скорость передачи данных по CAN-шине может достигать до 1 Мбит/с, при этом скорость передачи информации между
- 12. ТОПОЛОГИЯ И ФОРМА СИГНАЛОВ CAN-ШИНЫ ЛЕГКОВОГО АВТОМОБИЛЯ.
- 13. Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN.
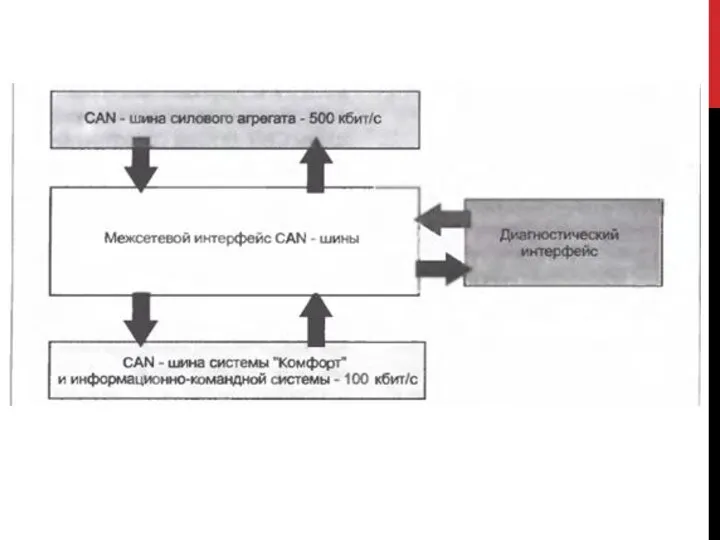
- 15. На рисунке показан фрагмент CAN-шин с распределением нагрузки в линиях CAN-High, CAN-Low. Системы и блоки управления
- 16. Также интерфейс используется для ввода и вывода диагностической информации, запрос которой реализуется по проводу «К», подключенному
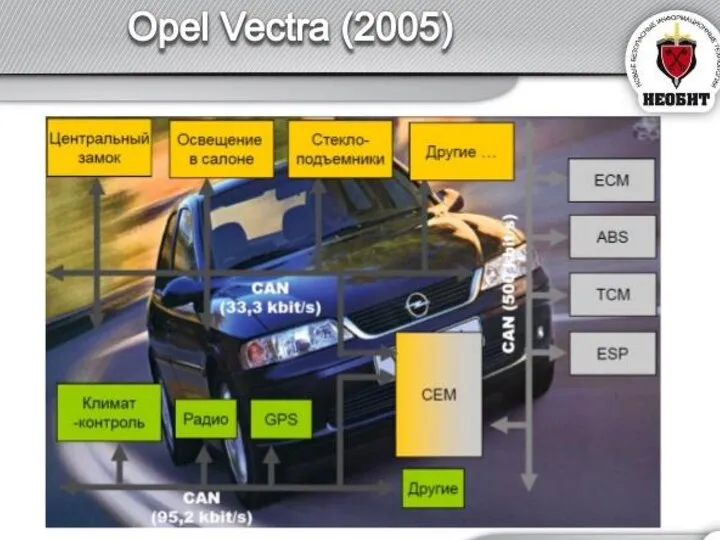
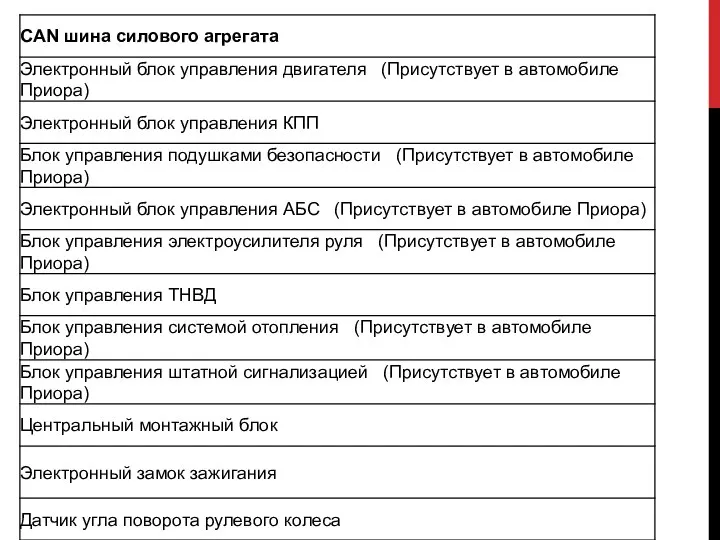
- 18. CAN-ШИНЫ СОВРЕМЕННОГО АВТОМОБИЛЯ CAN-шины современного автомобиля В скобках помечено какие из блоков управления, общающихся по шине
- 21. Скачать презентацию
Электрические цепи автомобилей усложнялись и разрастались год от года. Первые автомобили
Электрические цепи автомобилей усложнялись и разрастались год от года. Первые автомобили
CAN-шина - это система цифровой связи и управления электрическими устройствами автомобиля,
CAN-шина - это система цифровой связи и управления электрическими устройствами автомобиля,
Если данные передаются по двум проводам (т.н. “витая пара”) последовательно, импульс
Если данные передаются по двум проводам (т.н. “витая пара”) последовательно, импульс
Правила, по которым отдельные блоки обмениваются информацией, в электронике называются протоколом
Правила, по которым отдельные блоки обмениваются информацией, в электронике называются протоколом
Обмен информацией идет в обоих направлениях, т.е. можно не только включить
Обмен информацией идет в обоих направлениях, т.е. можно не только включить
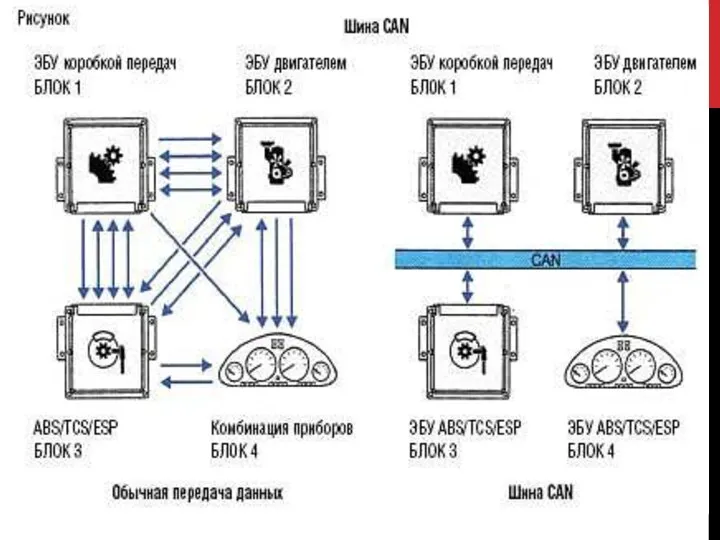
CAN-шины современного автомобиля
CAN-шины современного автомобиля
Скорость передачи данных по CAN-шине может достигать до 1 Мбит/с, при
Скорость передачи данных по CAN-шине может достигать до 1 Мбит/с, при

ТОПОЛОГИЯ И ФОРМА СИГНАЛОВ CAN-ШИНЫ ЛЕГКОВОГО АВТОМОБИЛЯ.
ТОПОЛОГИЯ И ФОРМА СИГНАЛОВ CAN-ШИНЫ ЛЕГКОВОГО АВТОМОБИЛЯ.
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате
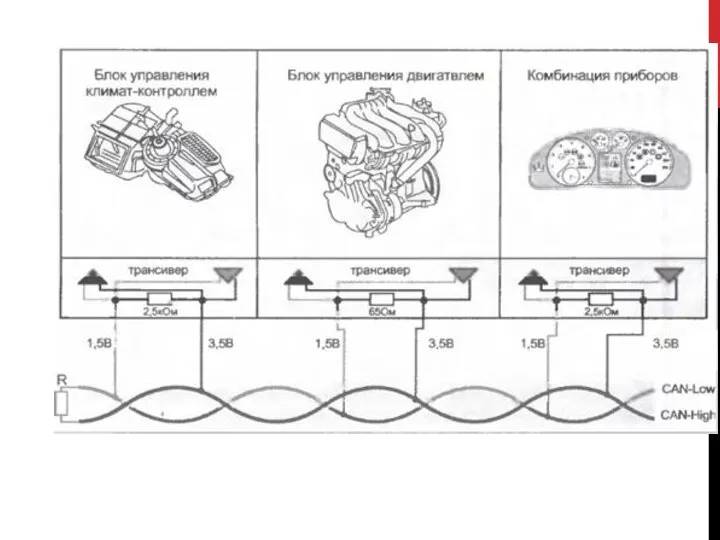
На рисунке показан фрагмент CAN-шин с распределением нагрузки в линиях CAN-High,
На рисунке показан фрагмент CAN-шин с распределением нагрузки в линиях CAN-High,
Также интерфейс используется для ввода и вывода диагностической информации, запрос которой
Также интерфейс используется для ввода и вывода диагностической информации, запрос которой
CAN-ШИНЫ СОВРЕМЕННОГО АВТОМОБИЛЯ
CAN-шины современного автомобиля
В скобках помечено какие из блоков управления,
CAN-ШИНЫ СОВРЕМЕННОГО АВТОМОБИЛЯ
CAN-шины современного автомобиля
В скобках помечено какие из блоков управления,
 Презентация на тему "ЛЕЙКОЦИТОЗ" - скачать презентации по Медицине
Презентация на тему "ЛЕЙКОЦИТОЗ" - скачать презентации по Медицине Презентация "Символы родной земли" - скачать презентации по МХК
Презентация "Символы родной земли" - скачать презентации по МХК Стационарный металлоискатель
Стационарный металлоискатель Презентация на тему: Работу выполнила учитель начальных классов МБОУ СОШ № 1 Панова А.В.
Презентация на тему: Работу выполнила учитель начальных классов МБОУ СОШ № 1 Панова А.В. Половые железы
Половые железы Исследование и разработка направленного ответвителя с улучшенными характеристиками
Исследование и разработка направленного ответвителя с улучшенными характеристиками СТЕКЛЯННЫЕ ТОВАРЫ
СТЕКЛЯННЫЕ ТОВАРЫ Шведская крона
Шведская крона  OOP with C#. Introduction C#. Data Types. Variables, expressions, statements. C# decision and iteration constructs
OOP with C#. Introduction C#. Data Types. Variables, expressions, statements. C# decision and iteration constructs Классификация свойств строительных материалов
Классификация свойств строительных материалов Обмен в режиме прерывания. Программные и аппаратные средства, обеспечивающие обмен в режиме прерывания
Обмен в режиме прерывания. Программные и аппаратные средства, обеспечивающие обмен в режиме прерывания Customs and traditions of Kazakhstan and Great Britain
Customs and traditions of Kazakhstan and Great Britain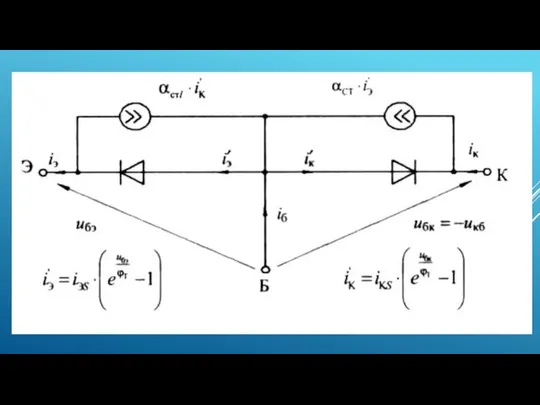 Схемы и формулы по электронике
Схемы и формулы по электронике Атопический дерматит
Атопический дерматит Регулярные выражения (C#)
Регулярные выражения (C#) ФИНАНСОВАЯ СИСТЕМА И ЕЕ РОЛЬ В ЭКОНОМИЧЕСКОЙ БЕЗОПАСНОСТИ СТРАНЫ Галибина Л. Т-114
ФИНАНСОВАЯ СИСТЕМА И ЕЕ РОЛЬ В ЭКОНОМИЧЕСКОЙ БЕЗОПАСНОСТИ СТРАНЫ Галибина Л. Т-114  Презентация Теория поведения личности в организации
Презентация Теория поведения личности в организации Возникновение квантовой механики. Основные этапы её развития. Выполнил студент ФТД группа-111 Бобырь Алексей
Возникновение квантовой механики. Основные этапы её развития. Выполнил студент ФТД группа-111 Бобырь Алексей ИMЯ ЧИСЛИТЕЛЬНОЕ (THE NUMЕRAL)
ИMЯ ЧИСЛИТЕЛЬНОЕ (THE NUMЕRAL)  Эмпиризм
Эмпиризм ПРОТЕЗИРОВАНИЕ ПОСЛЕ ХИРУРГИЧЕСКОЙ ПОДГОТОВКИ ЗУБОВ
ПРОТЕЗИРОВАНИЕ ПОСЛЕ ХИРУРГИЧЕСКОЙ ПОДГОТОВКИ ЗУБОВ 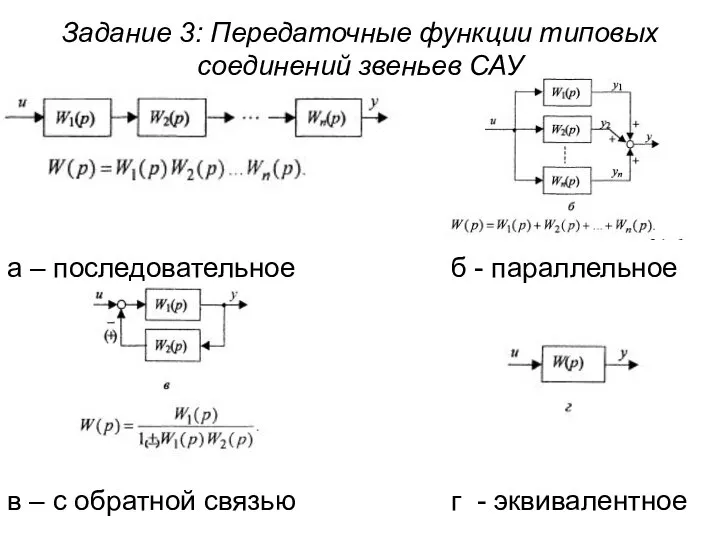 Передаточные функции типовых соединений звеньев САУ
Передаточные функции типовых соединений звеньев САУ Эндометриоз и бесплодие: ведение пациенток с позиции доказательной медицины Проф. А.А. Попов Московский областной НИИ Акушерства
Эндометриоз и бесплодие: ведение пациенток с позиции доказательной медицины Проф. А.А. Попов Московский областной НИИ Акушерства Единый социальный налог
Единый социальный налог  Презентация ВОЛЯ
Презентация ВОЛЯ Комплексный подход к оценке эффективности СВК: количественные и качественные критерии
Комплексный подход к оценке эффективности СВК: количественные и качественные критерии Мои любимые боксеры
Мои любимые боксеры Жеке сот орындаушысының қызметін бақылау
Жеке сот орындаушысының қызметін бақылау