- Система автоматического регулирования РАВ.ppt

Содержание
- 2. Функциональная схема системы дистанционного автоматического управления противотанковыми снарядами УП Д Р Пл СП СП - сельсин-приёмник,
- 3. Датчик Сельсин ЭД-501ТВ Номинальная мощность Рн, Вт 25 Номинальное количество оборотов nн, об/мин 2800 Номинальный ток
- 4. Переходный процесс нескорректированной системы σ = 0 - перерегулирование. hуст =0,00263 – установившееся значение tр =
- 5. ЛАЧХ и ЛФЧХ нескорректированой системы Запасы устойчивости: по амплитуде = 26,8 дБ, по фазе около 180
- 6. ЖЛАЧХ ,ЖЛФЧХ и ЛАЧХ КУ системы Запасы устойчивости: по амплитуде = 48 дБ, по фазе около
- 7. Схема корректирующего устройства R1 = 0,1 МОм, R2 = 5,1 МОм, С1 = 190 мкФ.
- 8. Блок-схема программной коррекции
- 9. Переходный процесс скорректированной системы σ = 0,19 - перерегулирование. hуст =1 – установившееся значение tр =
- 11. Скачать презентацию
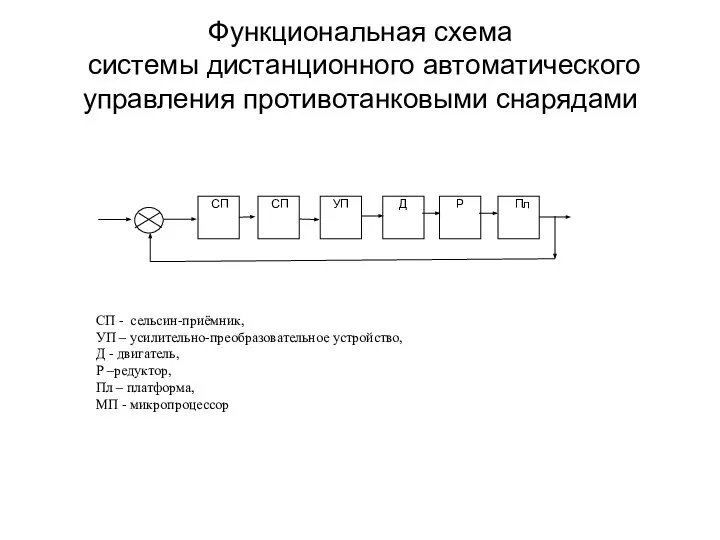
Функциональная схема
системы дистанционного автоматического управления противотанковыми снарядами
УП
Д
Р
Пл
СП
СП
Функциональная схема
системы дистанционного автоматического управления противотанковыми снарядами
УП
Д
Р
Пл
СП
СП
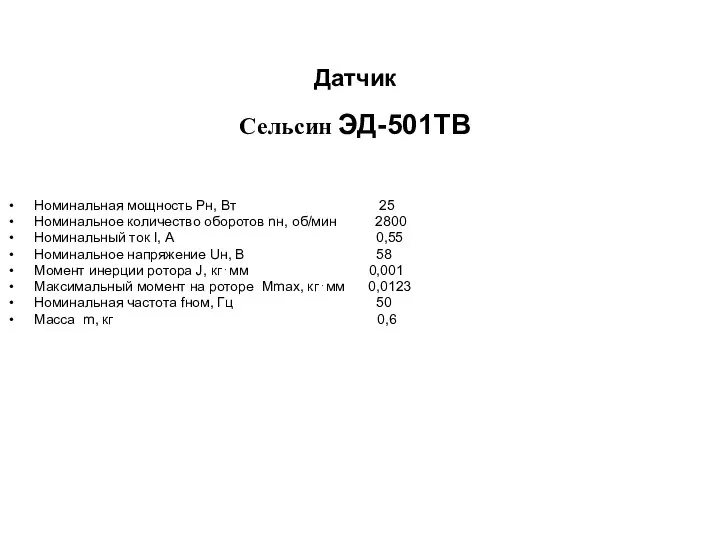
Датчик
Сельсин ЭД-501ТВ
Номинальная мощность Рн, Вт 25
Номинальное количество оборотов nн, об/мин
Датчик
Сельсин ЭД-501ТВ
Номинальная мощность Рн, Вт 25
Номинальное количество оборотов nн, об/мин
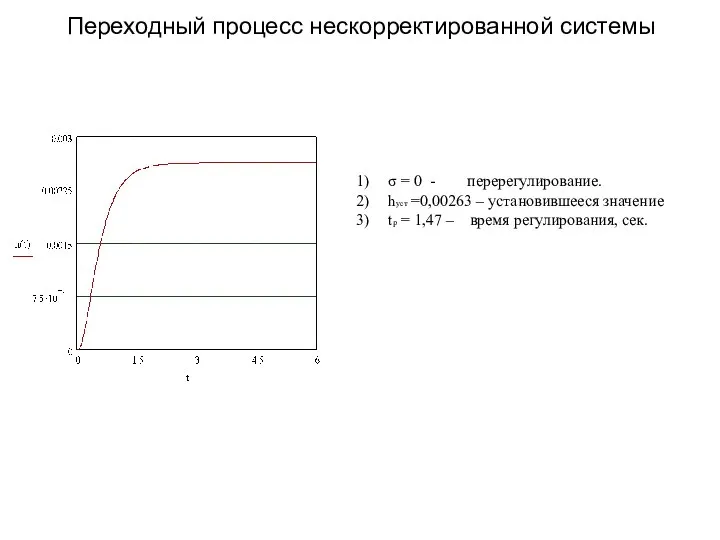
Переходный процесс нескорректированной системы
σ = 0 - перерегулирование.
hуст =0,00263 – установившееся
Переходный процесс нескорректированной системы
σ = 0 - перерегулирование.
hуст =0,00263 – установившееся
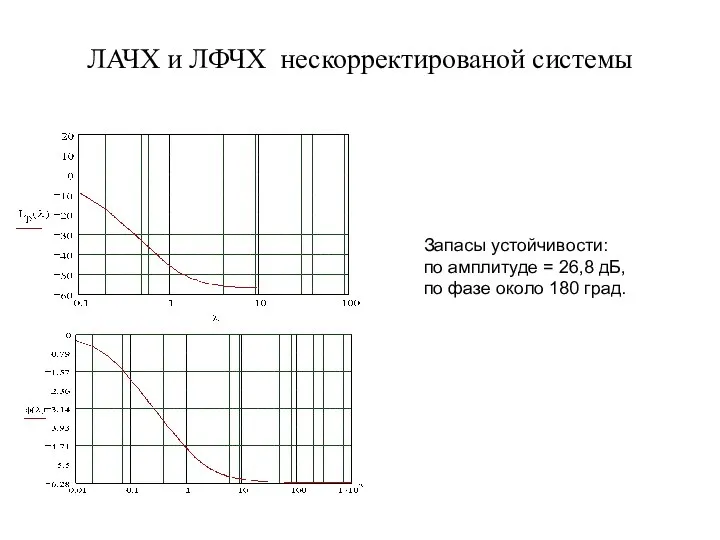
ЛАЧХ и ЛФЧХ нескорректированой системы
Запасы устойчивости:
по амплитуде = 26,8 дБ,
по
ЛАЧХ и ЛФЧХ нескорректированой системы
Запасы устойчивости:
по амплитуде = 26,8 дБ,
по
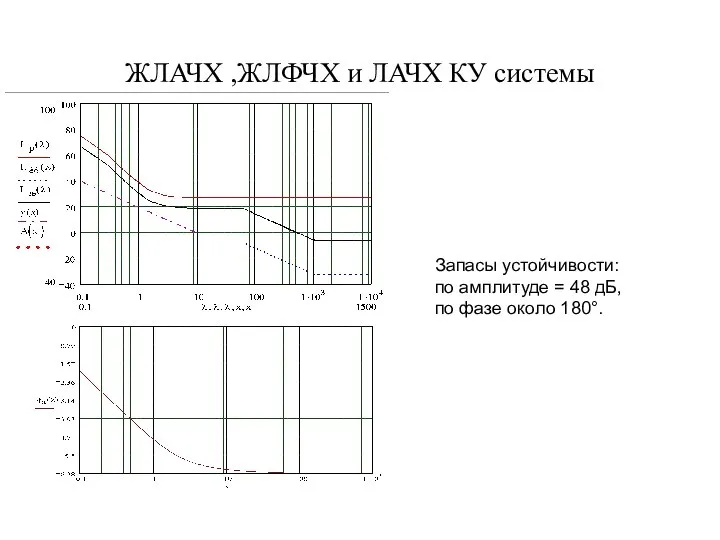
ЖЛАЧХ ,ЖЛФЧХ и ЛАЧХ КУ системы
Запасы устойчивости:
по амплитуде =
ЖЛАЧХ ,ЖЛФЧХ и ЛАЧХ КУ системы
Запасы устойчивости:
по амплитуде =
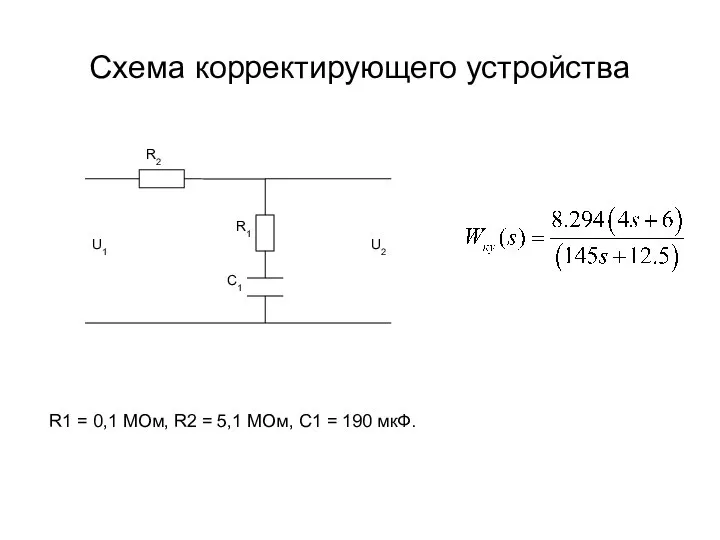
Схема корректирующего устройства
R1 = 0,1 МОм, R2 = 5,1 МОм, С1
Схема корректирующего устройства
R1 = 0,1 МОм, R2 = 5,1 МОм, С1

Блок-схема программной коррекции
Блок-схема программной коррекции
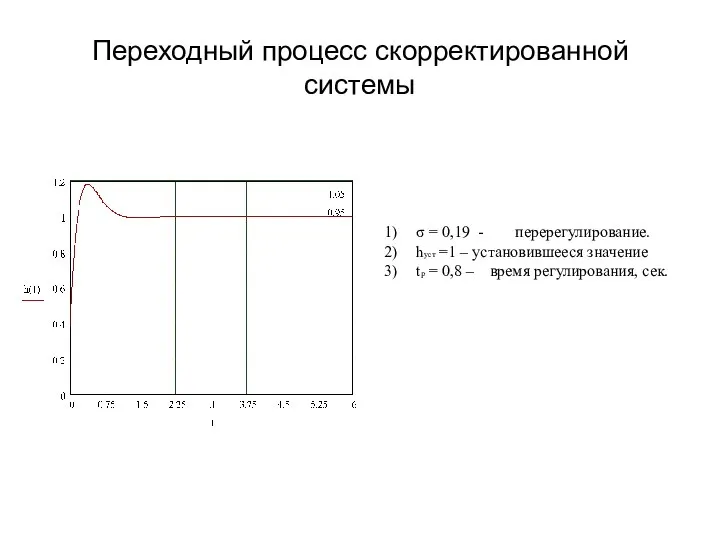
Переходный процесс скорректированной системы
σ = 0,19 - перерегулирование.
hуст =1 – установившееся
Переходный процесс скорректированной системы
σ = 0,19 - перерегулирование.
hуст =1 – установившееся
 Системы электронного документооборота и автоматизация производной деятельности
Системы электронного документооборота и автоматизация производной деятельности Подберем компьютер в три клика
Подберем компьютер в три клика Спортивные загадки Зимние виды спорта
Спортивные загадки Зимние виды спорта  Заочная экскурсия по музею-усадьбе Льва Николаевича Толстого «Ясная поляна»
Заочная экскурсия по музею-усадьбе Льва Николаевича Толстого «Ясная поляна» Макроэкономика Основы макроэкономического анализа. Подготовила: студентка 21 Э группы Тришмак Л. Проверил: Грубов А. П.
Макроэкономика Основы макроэкономического анализа. Подготовила: студентка 21 Э группы Тришмак Л. Проверил: Грубов А. П. Стили спортивного плавания
Стили спортивного плавания Православная церковь в годы Великой Отечественной войны
Православная церковь в годы Великой Отечественной войны Создание сети мини-кофеен «Pink Coffee» для девушек
Создание сети мини-кофеен «Pink Coffee» для девушек Види діяльності з використання місцевості. Туризм, спортивне орієнтування, походи вихідного дня
Види діяльності з використання місцевості. Туризм, спортивне орієнтування, походи вихідного дня Плавание. Виды плавания
Плавание. Виды плавания Лидерство. Кто такой лидер
Лидерство. Кто такой лидер Самоменеджмент – путь к успеху
Самоменеджмент – путь к успеху  Памятка первокурснику гуманитарного института КГУ
Памятка первокурснику гуманитарного института КГУ Подбор состава тяжелого бетона
Подбор состава тяжелого бетона Стандартизация, сертификация, регламентация, брэнды и товарные знаки как инструменты управления качеством
Стандартизация, сертификация, регламентация, брэнды и товарные знаки как инструменты управления качеством Хвойные растения
Хвойные растения Презентация на тему "Примерная программа формирования культуры здорового и безопасного образа жизни" - скачать презентации п
Презентация на тему "Примерная программа формирования культуры здорового и безопасного образа жизни" - скачать презентации п Проверка таблиц с учетом требований нормализации
Проверка таблиц с учетом требований нормализации Здоровьесберегающие технологии в учебном процессе
Здоровьесберегающие технологии в учебном процессе Разработка мероприятий, повышающих энерго-эффективность насосной станций ГКП «Астана Су Арнасы»
Разработка мероприятий, повышающих энерго-эффективность насосной станций ГКП «Астана Су Арнасы» Гигиена в иудаизме
Гигиена в иудаизме Methods and techniques for developing young learners’ pronunciation skills
Methods and techniques for developing young learners’ pronunciation skills Большой теннис
Большой теннис Презентация на тему "отруєння" - скачать презентации по Медицине
Презентация на тему "отруєння" - скачать презентации по Медицине RoboSurdoProject(RSP)
RoboSurdoProject(RSP) Прайс лист Декоротивного камня
Прайс лист Декоротивного камня 1 мамыр – Қазақстан халықтарының бірлігі күні
1 мамыр – Қазақстан халықтарының бірлігі күні Односигнальная избирательность
Односигнальная избирательность