- RoboSurdoProject(RSP)

Содержание
- 2. Целью проекта RSP является создание роботизированной антропоморфной руки способной демонстрировать жесты и дактиль РЖЯ.
- 3. Первый прототип RS-1 (Dandelion), претерпел ряд технических улучшений относительно базового проекта на который опиралась наша команда.
- 4. Изменения: Дополнительная перфорация в отдельных узлах сборки, для облегчения конструкции и уменьшения используемого пластика. 2.Замена громоздкого
- 5. По ходу решения технических вопросов, параллельно решалась проблема с дизайном руки и с созданием прототипа готового
- 6. В итоге в CAD системе Inventor была собрана действующая модель RS-1, проведён кинематический анализ пальцев кисти,
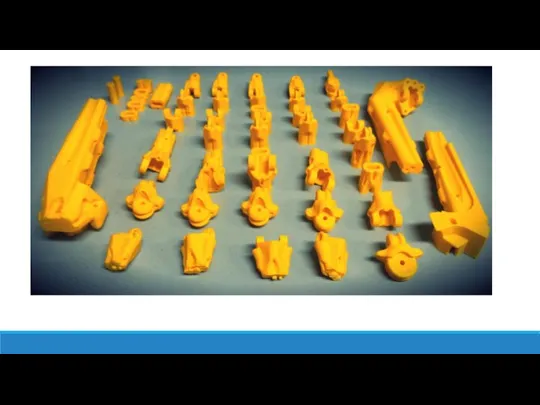
- 7. Как только все модели были подготовлены к печати на 3d-принтере, оставалось определиться с самим принтером ,а
- 9. Характеристики PLA-пластика
- 10. Печать длилась не один день и заняла большую часть времени, масштаб печати выбран в 1.5 раза
- 12. Для управления рукой используется Arduino Uno, для которой в целях удобства была распечатана подложка,также в RS-1
- 13. Подробнее о системе LUV и возникших трудностях: Идея системы такова, что все пальцы изначально находятся в
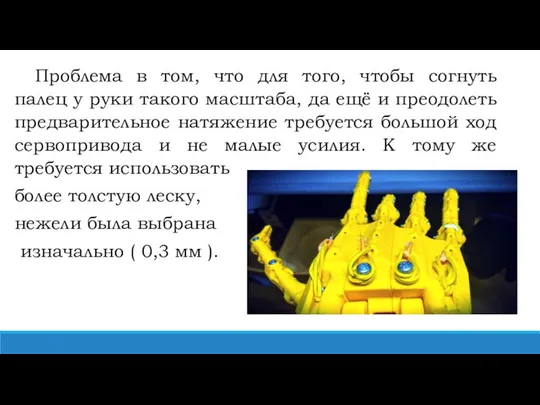
- 14. Проблема в том, что для того, чтобы согнуть палец у руки такого масштаба, да ещё и
- 15. Доработка прототипа «Dandelion» Полировка суставных частей для более гладкого хода, замена лески на более прочную, увеличение
- 16. Для эффективного развития проекта требуется слаженная команда, своя мастерская, отдельная очередь на печать 3d-моделей в Технопарке
- 19. Скачать презентацию
Целью проекта RSP является создание роботизированной антропоморфной руки способной демонстрировать жесты
Целью проекта RSP является создание роботизированной антропоморфной руки способной демонстрировать жесты
Первый прототип RS-1
(Dandelion), претерпел ряд технических улучшений относительно базового проекта
Первый прототип RS-1
(Dandelion), претерпел ряд технических улучшений относительно базового проекта
Изменения:
Дополнительная перфорация в отдельных узлах сборки, для облегчения конструкции и уменьшения
Изменения:
Дополнительная перфорация в отдельных узлах сборки, для облегчения конструкции и уменьшения
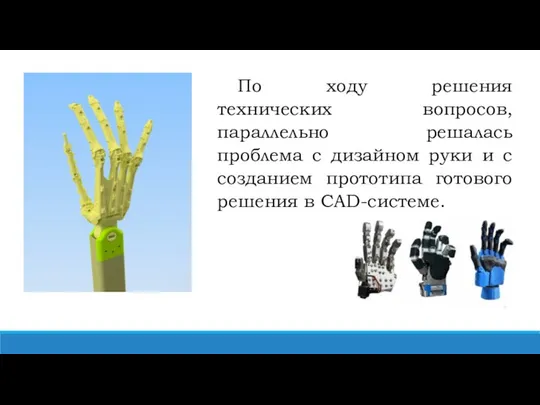
По ходу решения технических вопросов, параллельно решалась проблема с дизайном руки
По ходу решения технических вопросов, параллельно решалась проблема с дизайном руки
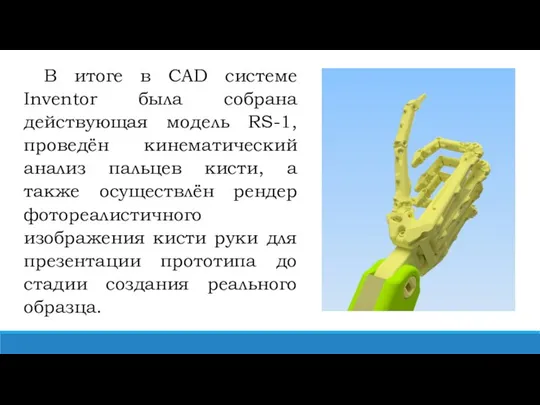
В итоге в CAD системе Inventor была собрана действующая модель RS-1,
В итоге в CAD системе Inventor была собрана действующая модель RS-1,
Как только все модели были подготовлены к печати на 3d-принтере, оставалось
Как только все модели были подготовлены к печати на 3d-принтере, оставалось

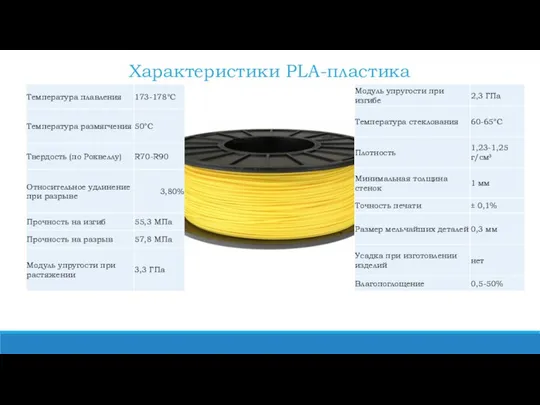
Характеристики PLA-пластика
Характеристики PLA-пластика
Печать длилась не один день и заняла большую часть времени, масштаб
Печать длилась не один день и заняла большую часть времени, масштаб

Для управления рукой используется Arduino Uno, для которой в целях удобства
Для управления рукой используется Arduino Uno, для которой в целях удобства
Подробнее о системе LUV и возникших трудностях:
Идея системы такова, что все
Подробнее о системе LUV и возникших трудностях:
Идея системы такова, что все
Проблема в том, что для того, чтобы согнуть палец у руки
Проблема в том, что для того, чтобы согнуть палец у руки
Доработка прототипа «Dandelion»
Полировка суставных частей для более гладкого хода, замена лески
Доработка прототипа «Dandelion»
Полировка суставных частей для более гладкого хода, замена лески
Для эффективного развития проекта требуется слаженная команда, своя мастерская, отдельная очередь
Для эффективного развития проекта требуется слаженная команда, своя мастерская, отдельная очередь
 Презентация Таможенный перевозчик
Презентация Таможенный перевозчик Кривошипно-шатунный механизм
Кривошипно-шатунный механизм Performance Measurement
Performance Measurement ГЕОФИЗИЧЕСКИЕ МЕТОДЫ ИССЛЕДОВАНИЯ СКВАЖИН ПРИ КОНТРОЛЕ РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ НЕФТИ И ГАЗА
ГЕОФИЗИЧЕСКИЕ МЕТОДЫ ИССЛЕДОВАНИЯ СКВАЖИН ПРИ КОНТРОЛЕ РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ НЕФТИ И ГАЗА Филолог. Прокачай свой уровень филологичности за 15 минут
Филолог. Прокачай свой уровень филологичности за 15 минут Л.Н. Толстой
Л.Н. Толстой Формирование представлений об адаптивных реакциях сердечного ритма, на физические нагрузки у младших школьников
Формирование представлений об адаптивных реакциях сердечного ритма, на физические нагрузки у младших школьников Deus, or Christmas tale
Deus, or Christmas tale Проект производства дренажного бетона с добавкой полимеров для дорожного покрытия в условиях Алтайского края
Проект производства дренажного бетона с добавкой полимеров для дорожного покрытия в условиях Алтайского края Балансовый метод исследования в Зарубежном туристском страноведении
Балансовый метод исследования в Зарубежном туристском страноведении Моделирование структуры UML
Моделирование структуры UML Кроссфит
Кроссфит Технология организации групповой работы в начальной школе
Технология организации групповой работы в начальной школе  Діни сауаттылық қоғамның дамуының негізі
Діни сауаттылық қоғамның дамуының негізі Логические операции
Логические операции Mobile complex of information and museum services
Mobile complex of information and museum services Концепт «Война и мир» в английской, русской и татарской фразеологии
Концепт «Война и мир» в английской, русской и татарской фразеологии Осенние зарисовки Красноярск 2018
Осенние зарисовки Красноярск 2018 Перекисное окисление липидов
Перекисное окисление липидов  девять правил сексологического консультирования:
девять правил сексологического консультирования: Средневековье_Культура Византии
Средневековье_Культура Византии СОБСТВЕННОСТЬ
СОБСТВЕННОСТЬ Особенности развития речи у детей с умственной отсталостью
Особенности развития речи у детей с умственной отсталостью Cтародавні архітектурні пам'ятки давньої Греції та Риму
Cтародавні архітектурні пам'ятки давньої Греції та Риму «Трудовой договор» Подготовила студентка Житкова Екатерина 1 курса экономического факультета группа э123б
«Трудовой договор» Подготовила студентка Житкова Екатерина 1 курса экономического факультета группа э123б Ортогональные проекции прямой
Ортогональные проекции прямой Радуга Татьяны Мавриной
Радуга Татьяны Мавриной соединение костей
соединение костей