- Системы автоматического контроля

Содержание
- 2. Рисунок 2 — Преобразователи механического перемещения: а — резисторные, б — индуктивные, с - емкостные Рисунок
- 3. Сельсины (self-synchronizing) Индикаторная схема соединения сельсинов Трансформаторная схема соединения сельсинов
- 4. 1 Манометрические термометры. 2 Терморезисторы (термосопротивления). 3 Термопары Рисунок 5 — Пружинные манометры: а — с
- 5. Датчики механических усилий Рисунок 7 — Датчики механических усилий: а — с упругим элементом и преобразователем
- 6. Автоматический контроль уровней и расходов продуктов ДУ - датчик уровня; ОБ - объект контроля; Р1 -
- 7. 1 — пьезометрическая трубка; 2 — редуктор давления; 3, 6 — электроды; 4 — изоляционный слой;
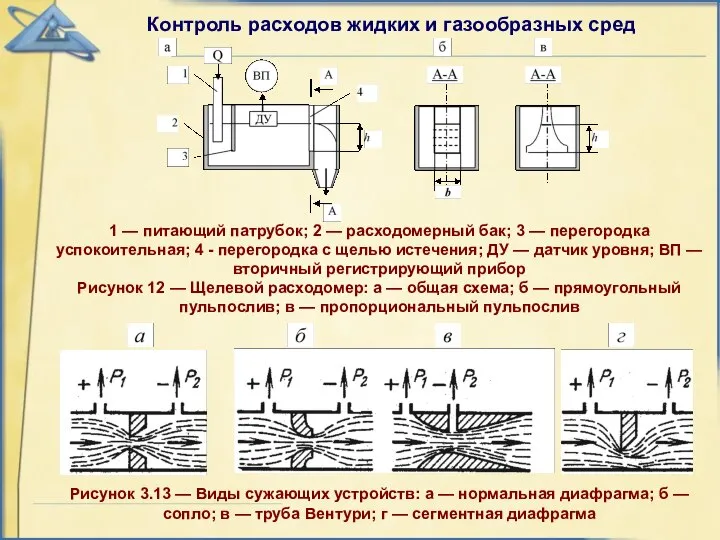
- 8. Контроль расходов жидких и газообразных сред 1 — питающий патрубок; 2 — расходомерный бак; 3 —
- 9. Рисунок 15 — Схема ротаметра (а) и поршневого расходомера б) 1 — труба Вентури; 2 —
- 10. Датчики скорости Схема тахогенератора постоянного тока (а) и его характеристика (б) Состоит из вращающегося ротора 1
- 11. Датчики скорости Схемы синхронного (а) и асинхронного (б) тахогенераторов Синхронный тахогенератор переменного тока (рис. а) состоит
- 12. Датчики специального назначения Термодатчик ТДЛ-2 Датчик контроля схода ленты КСЛ-2
- 13. Датчики специального назначения Электродный датчик ЭД-1 Тахогенераторные датчики УПДС-2
- 15. Скачать презентацию
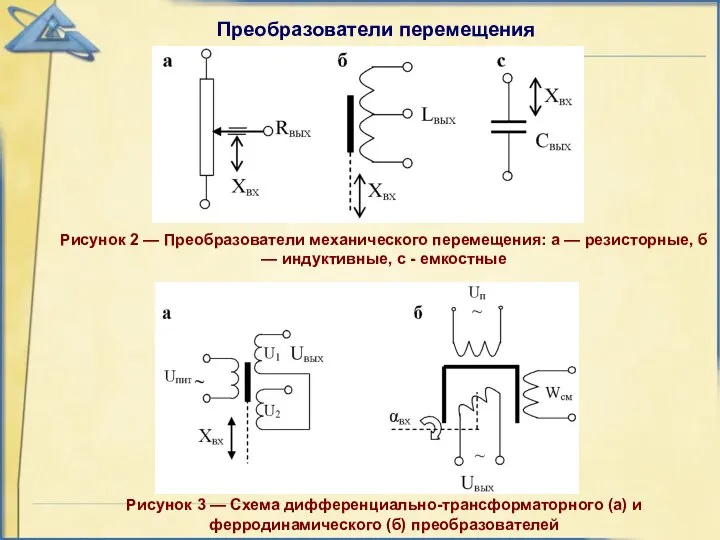
Рисунок 2 — Преобразователи механического перемещения: а — резисторные, б —
Рисунок 2 — Преобразователи механического перемещения: а — резисторные, б —
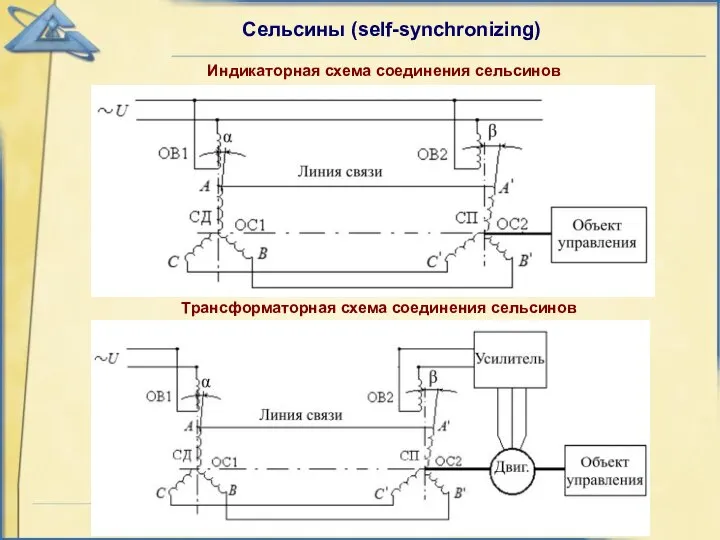
Сельсины (self-synchronizing)
Индикаторная схема соединения сельсинов
Трансформаторная схема соединения сельсинов
Сельсины (self-synchronizing)
Индикаторная схема соединения сельсинов
Трансформаторная схема соединения сельсинов
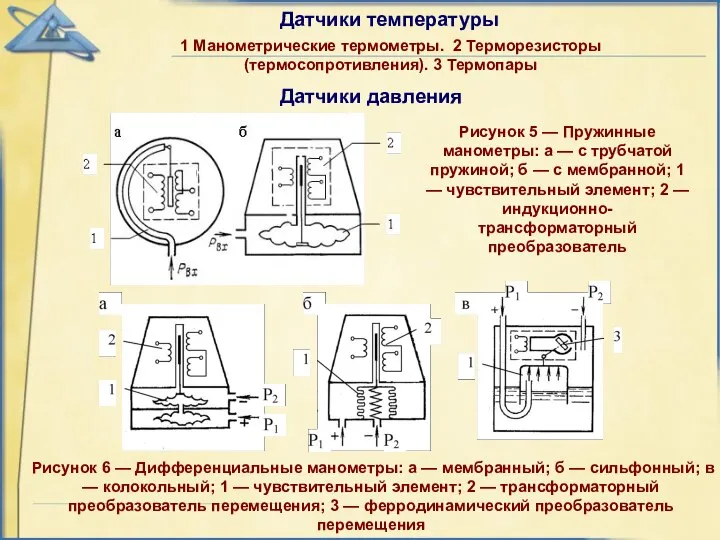
1 Манометрические термометры. 2 Терморезисторы (термосопротивления). 3 Термопары
Рисунок 5 — Пружинные
1 Манометрические термометры. 2 Терморезисторы (термосопротивления). 3 Термопары
Рисунок 5 — Пружинные
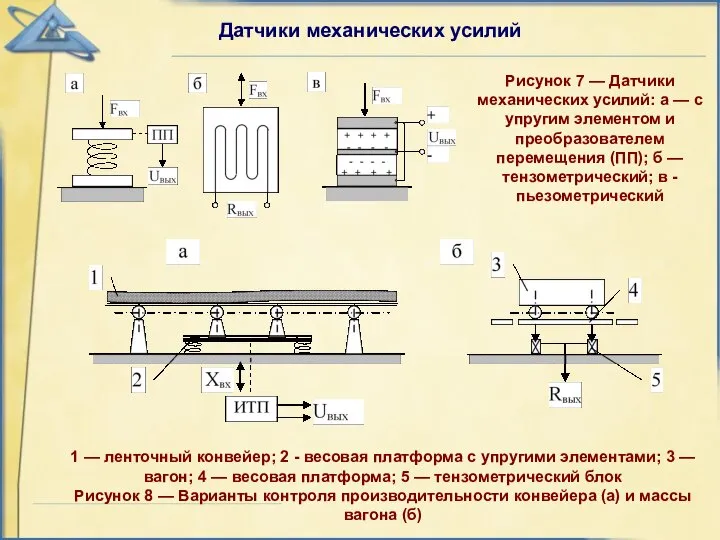
Датчики механических усилий
Рисунок 7 — Датчики механических усилий: а — с
Датчики механических усилий
Рисунок 7 — Датчики механических усилий: а — с
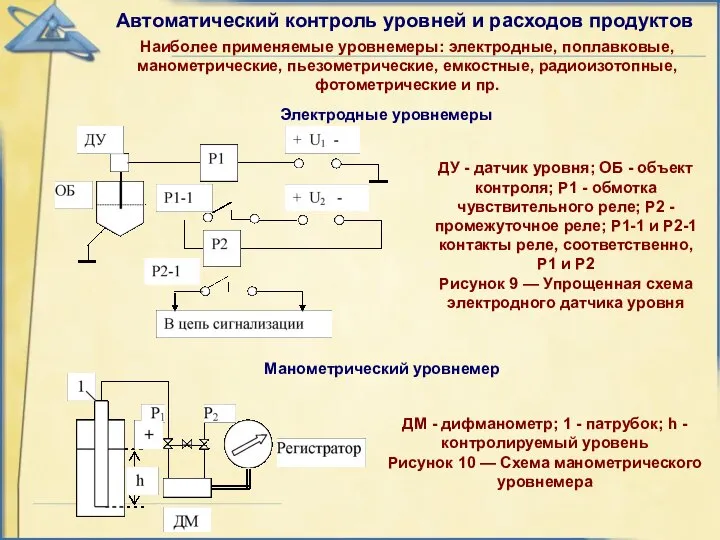
Автоматический контроль уровней и расходов продуктов
ДУ - датчик уровня; ОБ -
Автоматический контроль уровней и расходов продуктов
ДУ - датчик уровня; ОБ -
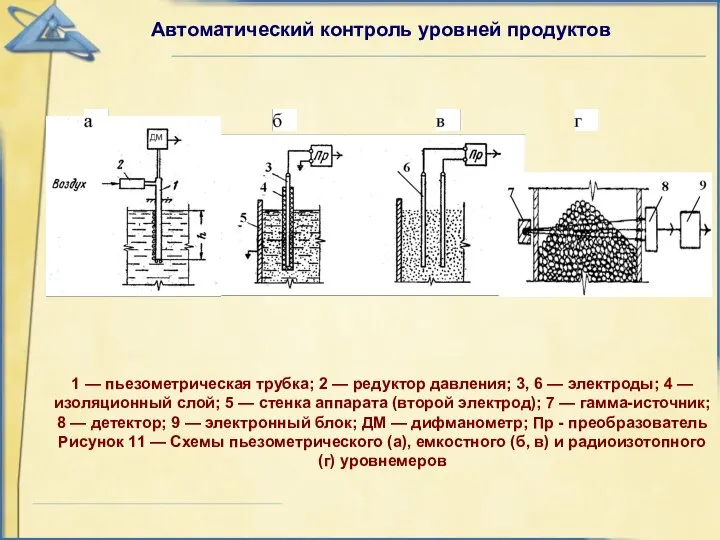
1 — пьезометрическая трубка; 2 — редуктор давления; 3, 6 —
1 — пьезометрическая трубка; 2 — редуктор давления; 3, 6 —
Контроль расходов жидких и газообразных сред
1 — питающий патрубок; 2 —
Контроль расходов жидких и газообразных сред
1 — питающий патрубок; 2 —
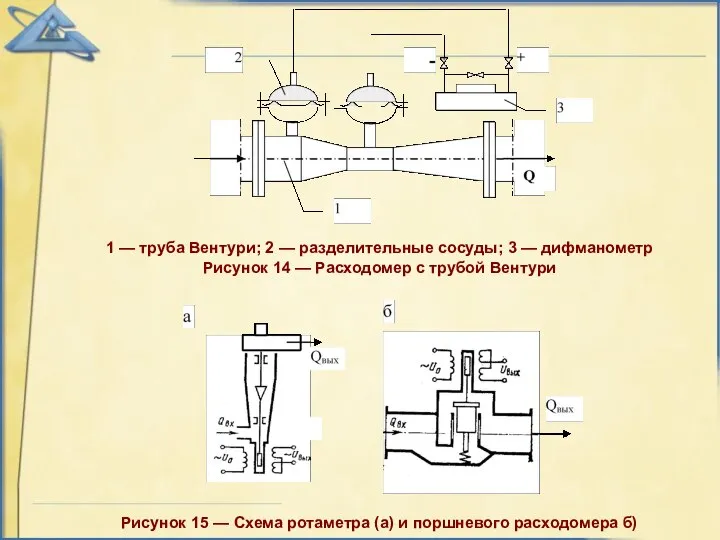
Рисунок 15 — Схема ротаметра (а) и поршневого расходомера б)
1 —
Рисунок 15 — Схема ротаметра (а) и поршневого расходомера б)
1 —
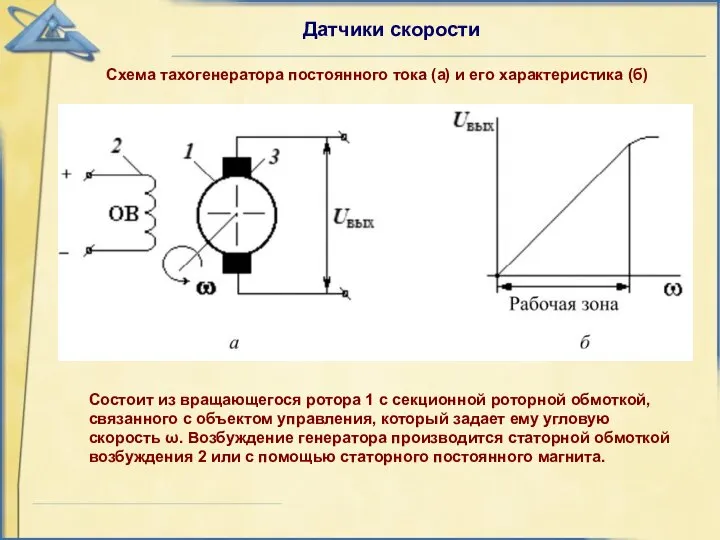
Датчики скорости
Схема тахогенератора постоянного тока (а) и его характеристика (б)
Состоит из
Датчики скорости
Схема тахогенератора постоянного тока (а) и его характеристика (б)
Состоит из

Датчики скорости
Схемы синхронного (а) и асинхронного (б) тахогенераторов
Синхронный тахогенератор переменного тока
Датчики скорости
Схемы синхронного (а) и асинхронного (б) тахогенераторов
Синхронный тахогенератор переменного тока
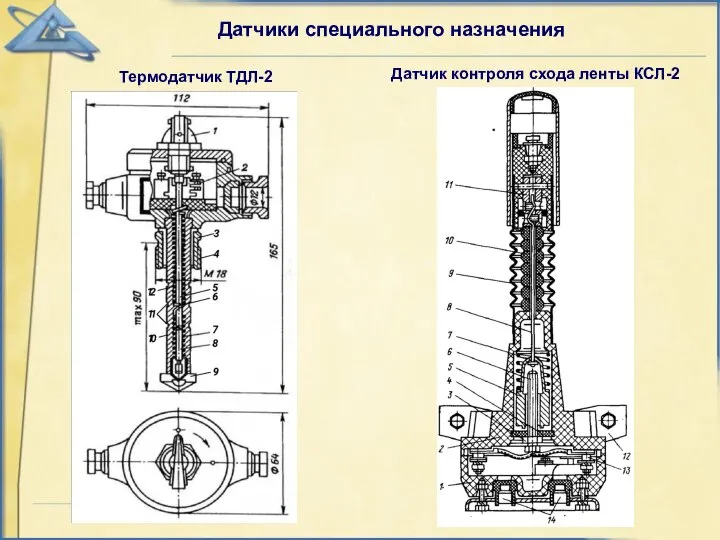
Датчики специального назначения
Термодатчик ТДЛ-2
Датчик контроля схода ленты КСЛ-2
Датчики специального назначения
Термодатчик ТДЛ-2
Датчик контроля схода ленты КСЛ-2
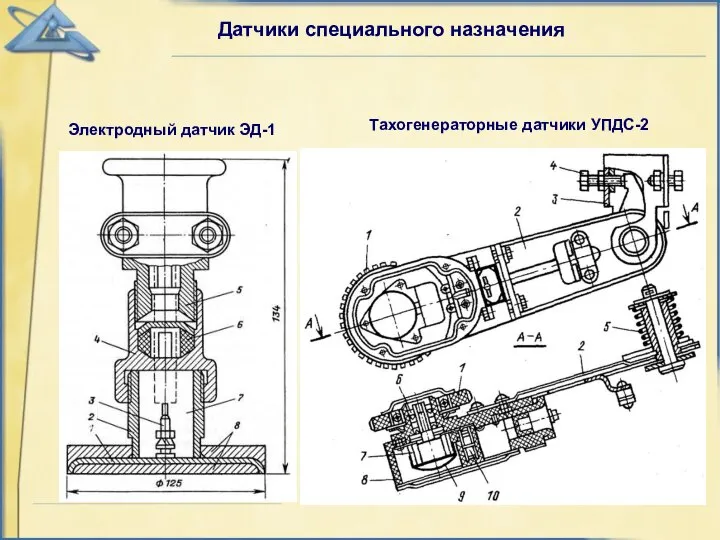
Датчики специального назначения
Электродный датчик ЭД-1
Тахогенераторные датчики УПДС-2
Датчики специального назначения
Электродный датчик ЭД-1
Тахогенераторные датчики УПДС-2
 Монтаж кабельных линий напряжением 0.4 кВ
Монтаж кабельных линий напряжением 0.4 кВ Классы. ООП в Java. Конструкторы. Блоки инициализации.
Классы. ООП в Java. Конструкторы. Блоки инициализации. Система многолетней спортивной подготовки. Многолетняя спортивная подготовка в ИВС
Система многолетней спортивной подготовки. Многолетняя спортивная подготовка в ИВС Презентация Виды транспортных и коммерческих документов, применяемых при международных перевозках товаров автомобильным трансп
Презентация Виды транспортных и коммерческих документов, применяемых при международных перевозках товаров автомобильным трансп Урок – сказка Репка
Урок – сказка Репка Желідегі дистанциялық қорғаныс
Желідегі дистанциялық қорғаныс Как влияют ошибки юзабилити на конверсию магазинов
Как влияют ошибки юзабилити на конверсию магазинов Подсистема управления запасами
Подсистема управления запасами Гражданское общество: понятие, подсистемы, функции. Подготовила: Мишина Дарья
Гражданское общество: понятие, подсистемы, функции. Подготовила: Мишина Дарья Розрахунок електричної мережі 110 кВ і 3-х підстанцій
Розрахунок електричної мережі 110 кВ і 3-х підстанцій Хеш функції
Хеш функції Основы религиозных культур и светской этики
Основы религиозных культур и светской этики Правовая охрана программ и данных
Правовая охрана программ и данных  7 апреля
7 апреля Постигая глубины Слова. Чтения молитвенной недели
Постигая глубины Слова. Чтения молитвенной недели Создание консольного приложения с текстовым меню
Создание консольного приложения с текстовым меню Врубель: болезнь гения Выполнила: Мамрукова О.В. 206 группа лечебного факультета
Врубель: болезнь гения Выполнила: Мамрукова О.В. 206 группа лечебного факультета  Великая Победа в истории моей семьи
Великая Победа в истории моей семьи Межведомственная модель профессиональных стандартов работников образования и социальной сферы. Образование
Межведомственная модель профессиональных стандартов работников образования и социальной сферы. Образование Культура моего народа
Культура моего народа Тәуелсіз Қазақстан Республикасының құрылуы мен қалыптасуындағы Тұнғыш Президент Н.Ә. Назарбаевтың рөлі мен қызметі
Тәуелсіз Қазақстан Республикасының құрылуы мен қалыптасуындағы Тұнғыш Президент Н.Ә. Назарбаевтың рөлі мен қызметі Отчётно – выборное собрание Отчётно – выборное собрание
Отчётно – выборное собрание Отчётно – выборное собрание Цифровая схемотехника. Полупроводники
Цифровая схемотехника. Полупроводники Битумные эмульсии, вязкий битум и битумно-резиновые дисперсии, дегтевые материалы
Битумные эмульсии, вязкий битум и битумно-резиновые дисперсии, дегтевые материалы Продажа коммерческой недвижимости в ЖК «4 YOU», Московское ш., дом 13, корп. 1, 2
Продажа коммерческой недвижимости в ЖК «4 YOU», Московское ш., дом 13, корп. 1, 2 Апаратне забезпечення інформаційних систем. Історія розвитку обчислювальної техніки. (Урок 4)
Апаратне забезпечення інформаційних систем. Історія розвитку обчислювальної техніки. (Урок 4) Пользовательские (перечисляемые и интервальные) типы данных 7 слайдов
Пользовательские (перечисляемые и интервальные) типы данных 7 слайдов Домашняя мультимедиа-платформа с голосовым помощником Алисой
Домашняя мультимедиа-платформа с голосовым помощником Алисой