- Системы телемеханики, цифровые устройства автоматики

Содержание
- 2. Общие сведения о системах телемеханики Телемеханика — область науки и техники, предметом которой является разработка методов
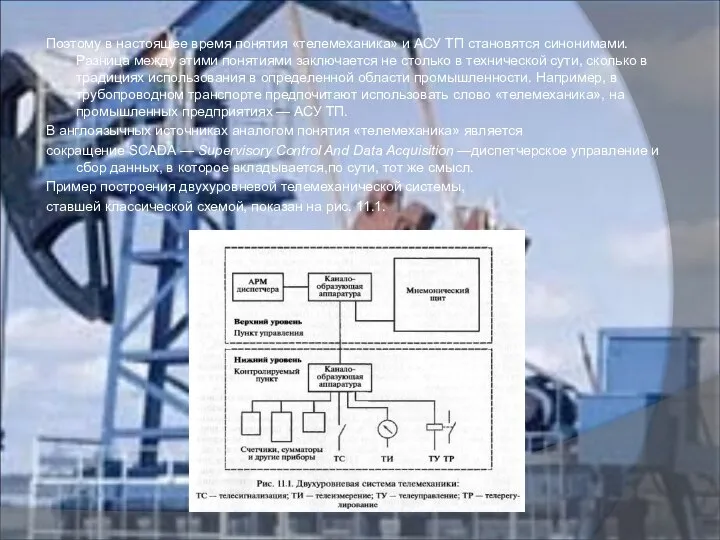
- 3. Поэтому в настоящее время понятия «телемеханика» и АСУ ТП становятся синонимами. Разница между этими понятиями заключается
- 4. Контроль и управление системой осуществляют с пункта управления (ПУ), где находятся диспетчер, аппаратура телемеханики, ЭВМ, мнемонический
- 5. Телеизмерение используется для получения количественных значений непрерывных параметров контролируемого процесса, например температуры, давления и т. п.
- 6. Контролируемый пункт — это место размещения объектов контроля и управления, а также аппаратура, выполняющая функции контроля
- 7. Автоматизированное рабочее место (АРМ) — это рабочее место специалиста в какой-либо предметной области, оборудованное компьютером и
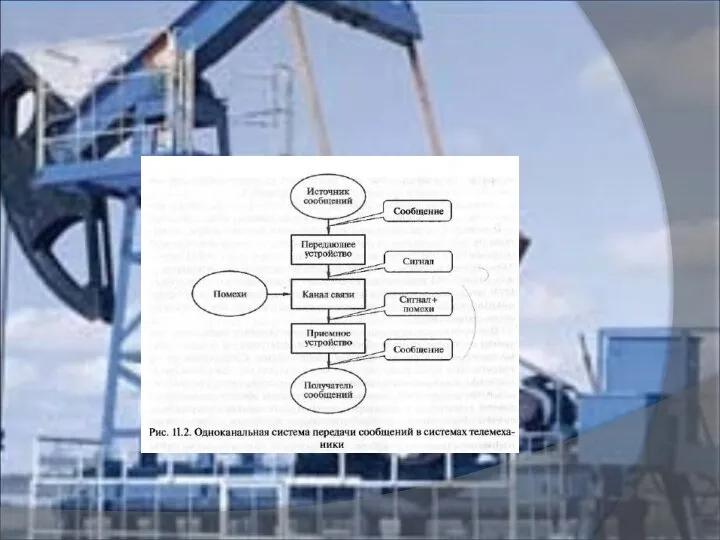
- 8. Передача информации в системах телемеханики При управлении производственным процессом происходит постоянный обмен различными сообщениями о событиях,
- 10. Преобразование сообщений для передачи по каналам связи В зависимости от характера изменения во времени сообщения делятся
- 11. В зависимости от того, какой параметр переносчика меняется, модуляция может быть непрерывной (амплитудной, частотной, фазовой) или
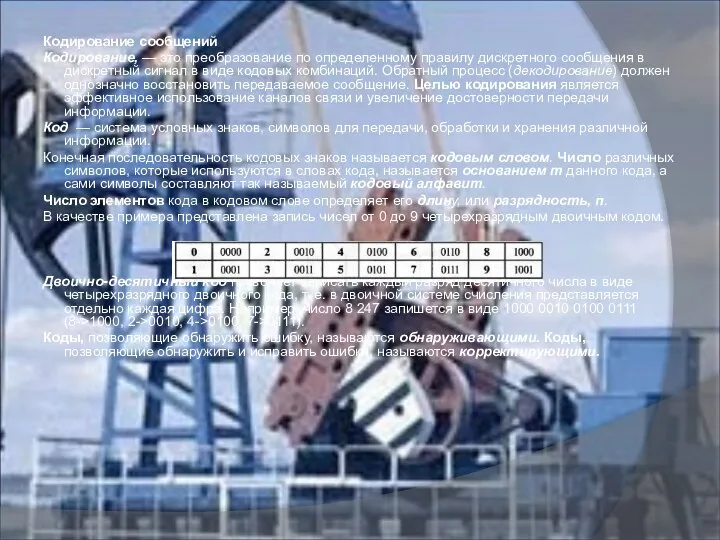
- 12. Кодирование сообщений Кодирование, — это преобразование по определенному правилу дискретного сообщения в дискретный сигнал в виде
- 13. Логические функции и логические элементы. Логические переменные и основные операции над ними В цифровых устройствах носителем
- 14. Для хранения и обработки информации в виде текстов, формул и чисел необходимо с помощью бит закодировать
- 15. Существует три основные операции между логическими переменными: конъюнкция (логическое И); дизъюнкция (логическое ИЛИ); инверсия (логическое НЕ).
- 16. Операции над логическими переменными выполняются по определенным правилам. Прежде всего необходимо учитывать принцип двойственности (теорема де
- 17. Реализация логических операций элементами цифровой техники Логические переменные могут иметь только два дискретных значения, поэтому они
- 18. Для реализации трех основных операций алгебры логики в схемах цифровых устройств используются основные логические элементы, входные
- 19. Информация, поступающая в цифровое устройство, представляет дискретный (т.е. состоящий из нулей и единиц) сигнал (код). На
- 20. В зависимости от вида этой связи цифровые устройства делят на комбинационные и последовательностные. В комбинационных устройствах
- 21. Аналого-цифровое и цифроаналоговое преобразование. Основные элементы цифровых устройств В основе функционирования любой системы автоматизации лежат информационные
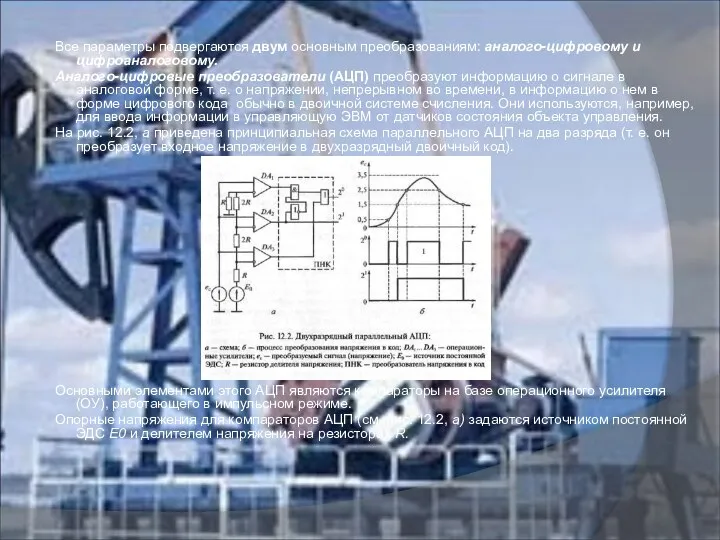
- 22. Все параметры подвергаются двум основным преобразованиям: аналого-цифровому и цифроаналоговому. Аналого-цифровые преобразователи (АЦП) преобразуют информацию о сигнале
- 23. Цифроаналоговые преобразователи (ЦАП) преобразуют цифровой двоичный код в аналоговое выходное напряжение (ток). Это позволяет, например, использовать
- 24. Кроме АЦП и ЦАП в цифровых устройствах автоматики широко используются еще несколько элементов — коммутаторы, дешифраторы,
- 25. Дешифратор (декодер) представляет собой устройство, которое преобразует т-разрядный двоичный код на входе в л-разрядный двоичный код
- 26. Микропроцессоры, микропроцессорные системы, программируемые логические контроллеры Микропроцессор (МП) — это программно-управляемое устройство, осуществляющее процесс обработки цифровой
- 27. Структура любой МПС является магистрально-модульной, т. е. она состоит из набора модулей, подключенных к общим магистралям,
- 28. Взаимодействие узлов микроЭВМ между собой осуществляется с помощью трех шин: шины адреса (ША), шины данных (ШД)
- 29. ВУ в зависимости от способа передачи информации разделяются на две большие группы: устройства, обменивающиеся параллельными словами
- 30. Программируемые логические контроллеры (ПЛК) — микропроцессорные устройства, предназначенные для управления технологическим процессом. Они представляют собой устройства,
- 31. По функциональным признакам в ПЛК (рис. 12.6) можно выделить следующие элементы:
- 32. 1) центральный процессор (ЦП), предназна ченный для выполнения команд (инструкций) управляющей программы и обработки данных, размещенных
- 33. Интерфейс (совокупность технических и программных средств, обеспечивающих взаимодействие различных устройств) задает параметры, процедуры и характеристики взаимодействия
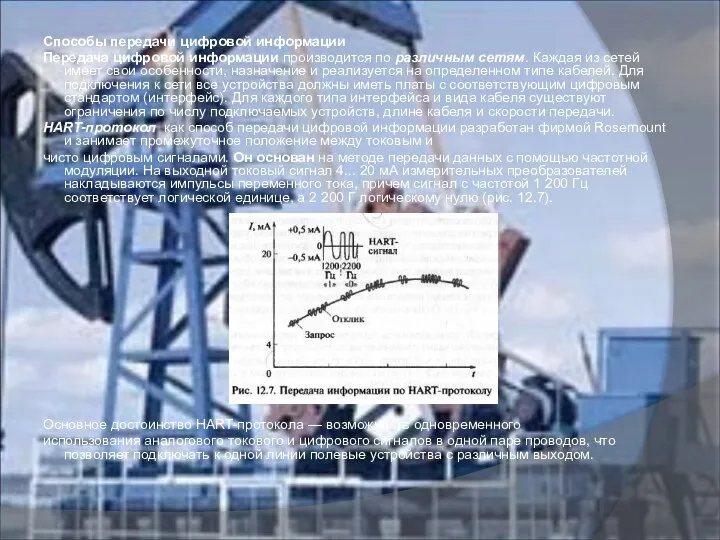
- 34. Способы передачи цифровой информации Передача цифровой информации производится по различным сетям. Каждая из сетей имеет свои
- 35. Интерфейс RS-232является наиболее простым среди RS-интерфейсов (RS означает «рекомендуемый стандарт»). Это стандарт последовательной синхронной и асинхронной
- 37. Скачать презентацию
Общие сведения о системах телемеханики
Телемеханика — область науки и техники, предметом
Общие сведения о системах телемеханики
Телемеханика — область науки и техники, предметом
Поэтому в настоящее время понятия «телемеханика» и АСУ ТП становятся синонимами.
Поэтому в настоящее время понятия «телемеханика» и АСУ ТП становятся синонимами.
Контроль и управление системой осуществляют с пункта управления (ПУ), где находятся
Контроль и управление системой осуществляют с пункта управления (ПУ), где находятся
Телеизмерение используется для получения количественных значений непрерывных параметров контролируемого процесса, например
Телеизмерение используется для получения количественных значений непрерывных параметров контролируемого процесса, например
Контролируемый пункт — это место размещения объектов контроля и управления, а
Контролируемый пункт — это место размещения объектов контроля и управления, а
Автоматизированное рабочее место (АРМ) — это рабочее место специалиста в какой-либо
Автоматизированное рабочее место (АРМ) — это рабочее место специалиста в какой-либо

Передача информации в системах телемеханики
При управлении производственным процессом происходит постоянный обмен
Передача информации в системах телемеханики
При управлении производственным процессом происходит постоянный обмен
Преобразование сообщений для передачи по каналам связи
В зависимости от характера изменения
Преобразование сообщений для передачи по каналам связи
В зависимости от характера изменения
В зависимости от того, какой параметр переносчика меняется, модуляция может быть
В зависимости от того, какой параметр переносчика меняется, модуляция может быть
Кодирование сообщений
Кодирование, — это преобразование по определенному правилу дискретного сообщения в
Кодирование сообщений
Кодирование, — это преобразование по определенному правилу дискретного сообщения в
Логические функции и логические элементы. Логические переменные и основные операции
Логические функции и логические элементы. Логические переменные и основные операции
Для хранения и обработки информации в виде текстов, формул и чисел
Для хранения и обработки информации в виде текстов, формул и чисел
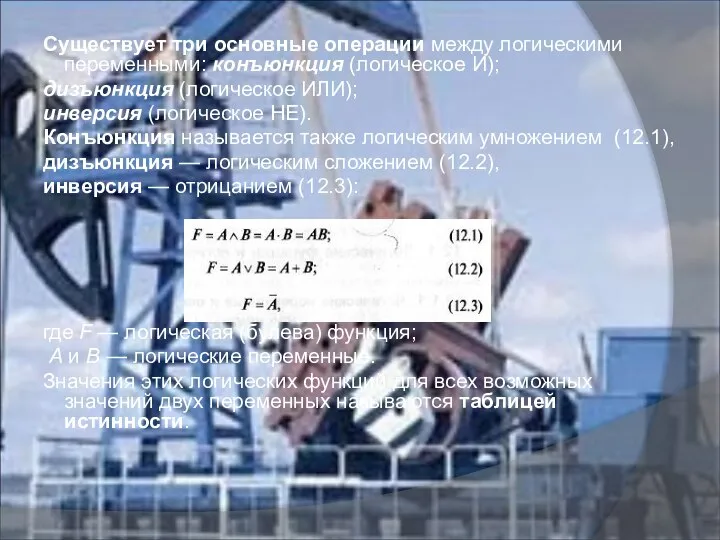
Существует три основные операции между логическими переменными: конъюнкция (логическое И);
дизъюнкция (логическое
Существует три основные операции между логическими переменными: конъюнкция (логическое И);
дизъюнкция (логическое
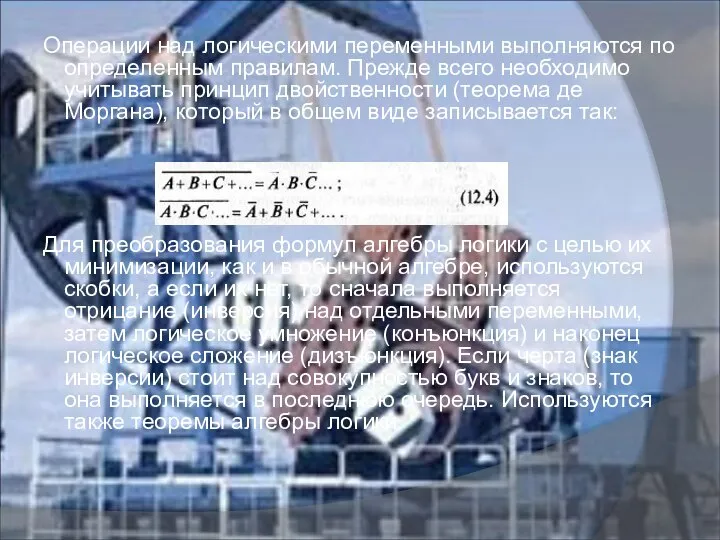
Операции над логическими переменными выполняются по определенным правилам. Прежде всего необходимо
Операции над логическими переменными выполняются по определенным правилам. Прежде всего необходимо
Реализация логических операций элементами цифровой техники
Логические переменные могут иметь только два
Реализация логических операций элементами цифровой техники
Логические переменные могут иметь только два
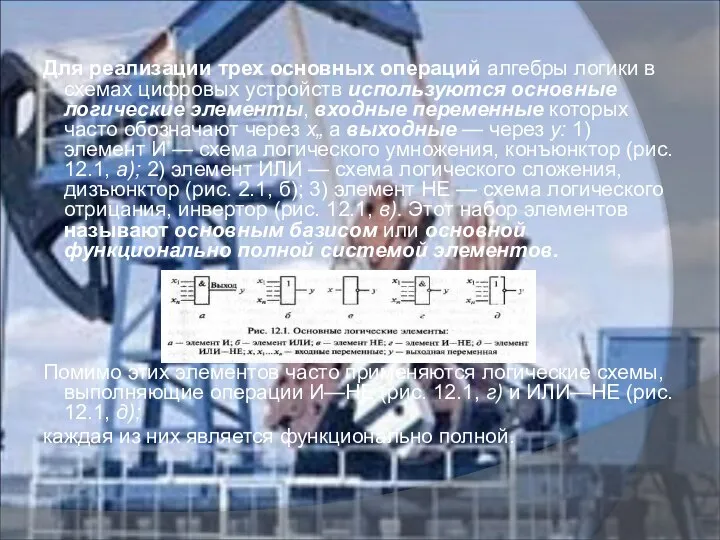
Для реализации трех основных операций алгебры логики в схемах цифровых устройств
Для реализации трех основных операций алгебры логики в схемах цифровых устройств
Информация, поступающая в цифровое устройство, представляет дискретный (т.е. состоящий из нулей
Информация, поступающая в цифровое устройство, представляет дискретный (т.е. состоящий из нулей
В зависимости от вида этой связи цифровые устройства делят на комбинационные
В зависимости от вида этой связи цифровые устройства делят на комбинационные
Аналого-цифровое и цифроаналоговое преобразование. Основные элементы цифровых устройств
В основе функционирования любой
Аналого-цифровое и цифроаналоговое преобразование. Основные элементы цифровых устройств
В основе функционирования любой
Все параметры подвергаются двум основным преобразованиям: аналого-цифровому и цифроаналоговому.
Аналого-цифровые преобразователи (АЦП)
Все параметры подвергаются двум основным преобразованиям: аналого-цифровому и цифроаналоговому.
Аналого-цифровые преобразователи (АЦП)
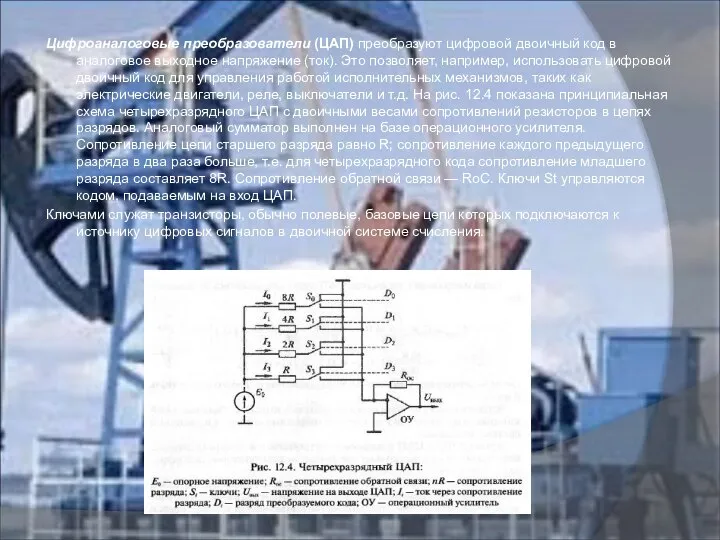
Цифроаналоговые преобразователи (ЦАП) преобразуют цифровой двоичный код в аналоговое выходное напряжение
Цифроаналоговые преобразователи (ЦАП) преобразуют цифровой двоичный код в аналоговое выходное напряжение
Кроме АЦП и ЦАП в цифровых устройствах автоматики широко используются еще
Кроме АЦП и ЦАП в цифровых устройствах автоматики широко используются еще
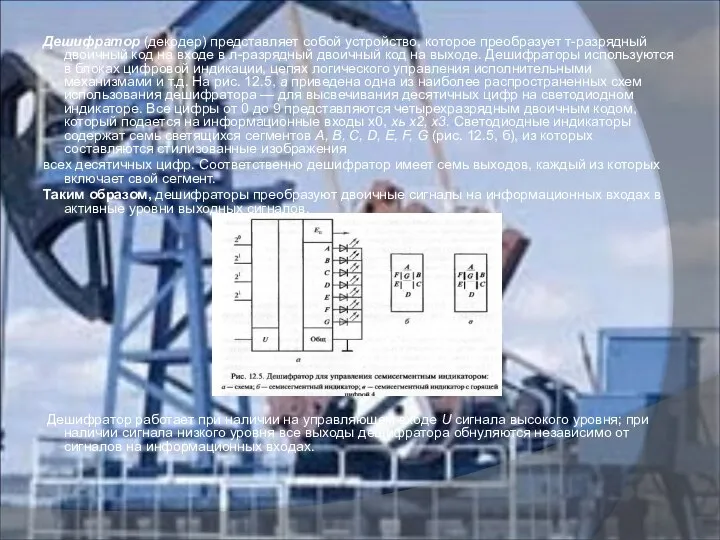
Дешифратор (декодер) представляет собой устройство, которое преобразует т-разрядный двоичный код на
Дешифратор (декодер) представляет собой устройство, которое преобразует т-разрядный двоичный код на
Микропроцессоры, микропроцессорные системы, программируемые логические контроллеры
Микропроцессор (МП) — это программно-управляемое устройство,
Микропроцессоры, микропроцессорные системы, программируемые логические контроллеры
Микропроцессор (МП) — это программно-управляемое устройство,
Структура любой МПС является магистрально-модульной, т. е. она состоит из набора
Структура любой МПС является магистрально-модульной, т. е. она состоит из набора
Взаимодействие узлов микроЭВМ между собой осуществляется с помощью трех шин: шины
Взаимодействие узлов микроЭВМ между собой осуществляется с помощью трех шин: шины
ВУ в зависимости от способа передачи информации разделяются на две большие
ВУ в зависимости от способа передачи информации разделяются на две большие

Программируемые логические контроллеры (ПЛК) — микропроцессорные устройства, предназначенные для управления технологическим
Программируемые логические контроллеры (ПЛК) — микропроцессорные устройства, предназначенные для управления технологическим

По функциональным признакам в ПЛК (рис. 12.6) можно выделить следующие элементы:
По функциональным признакам в ПЛК (рис. 12.6) можно выделить следующие элементы:
1) центральный процессор (ЦП), предназна ченный для выполнения команд (инструкций) управляющей
1) центральный процессор (ЦП), предназна ченный для выполнения команд (инструкций) управляющей
Интерфейс (совокупность технических и программных средств, обеспечивающих взаимодействие различных устройств) задает
Интерфейс (совокупность технических и программных средств, обеспечивающих взаимодействие различных устройств) задает
Способы передачи цифровой информации
Передача цифровой информации производится по различным сетям. Каждая
Способы передачи цифровой информации
Передача цифровой информации производится по различным сетям. Каждая
Интерфейс RS-232является наиболее простым среди RS-интерфейсов
(RS означает «рекомендуемый стандарт»). Это стандарт
Интерфейс RS-232является наиболее простым среди RS-интерфейсов
(RS означает «рекомендуемый стандарт»). Это стандарт
 Регуляторы натяжения нитей. Машинная игла
Регуляторы натяжения нитей. Машинная игла Понятие, сущность и задачи аудита
Понятие, сущность и задачи аудита Физиологические критерии спортивного отбора и ориентации
Физиологические критерии спортивного отбора и ориентации Презентация Nivea
Презентация Nivea Устройства и состав ПК. Периферийные устройства
Устройства и состав ПК. Периферийные устройства Презентация "Ведение успешного аптечного бизнеса" - скачать презентации по Экономике
Презентация "Ведение успешного аптечного бизнеса" - скачать презентации по Экономике Заповеди Божии
Заповеди Божии Урок Урок русского языка Что мы знаем о звуках и буквах?
Урок Урок русского языка Что мы знаем о звуках и буквах? Контроль результатов статистического наблюдения
Контроль результатов статистического наблюдения Проблема метода культурологии (часть ii)
Проблема метода культурологии (часть ii) Ikonet.com — визуальная энциклопедия
Ikonet.com — визуальная энциклопедия Федеральная служба по финансовому мониторингу (Росфинмониторинг)
Федеральная служба по финансовому мониторингу (Росфинмониторинг) Проповедь. Необходимость. Сложности
Проповедь. Необходимость. Сложности Фитнес-приложения
Фитнес-приложения Русская культура 16-17 веков
Русская культура 16-17 веков My favorite gadgets
My favorite gadgets Management in Russia
Management in Russia Тема 1. Финансовые отношения предприятия и принципы их организации.
Тема 1. Финансовые отношения предприятия и принципы их организации.  Социальная структура общества и социальная стратификация
Социальная структура общества и социальная стратификация Юсова Ирина Викторовна, учитель русского языка и литературы МБОУ «Мстерская средняя общеобразовательная школа Вязниковского рай
Юсова Ирина Викторовна, учитель русского языка и литературы МБОУ «Мстерская средняя общеобразовательная школа Вязниковского рай Демократия. Народовластие
Демократия. Народовластие самодеятельный и детский туризм в Беларусии
самодеятельный и детский туризм в Беларусии  Види цивільно-правового договору
Види цивільно-правового договору Презентация "Экспортный контроль товаров" - скачать презентации по Экономике
Презентация "Экспортный контроль товаров" - скачать презентации по Экономике Разработка программного модуля многопользовательской мобильной игры «Герои параллельных миров»
Разработка программного модуля многопользовательской мобильной игры «Герои параллельных миров» Интеграция и связка мобильного приложения и веб-сервиса, передача данных
Интеграция и связка мобильного приложения и веб-сервиса, передача данных НАПРАВЛЕНИЕ «ИСКУССТВА И ГУМАНИТАРНЫЕ НАУКИ»
НАПРАВЛЕНИЕ «ИСКУССТВА И ГУМАНИТАРНЫЕ НАУКИ» Презентация на тему "Домашние задания для детей" - скачать презентации по Педагогике
Презентация на тему "Домашние задания для детей" - скачать презентации по Педагогике