- СКАЛЯРНОЕ УПРАВЛЕНИЕ ЧАСТОТНО-РЕГУЛИРУЕМОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА

Содержание
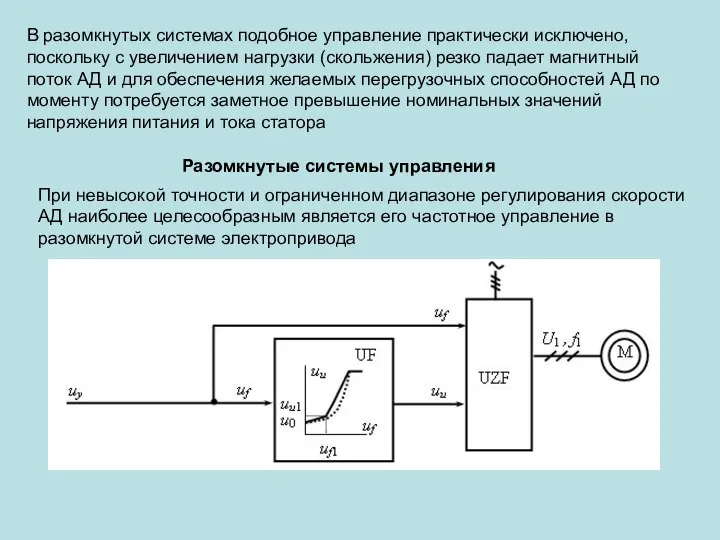
- 2. В разомкнутых системах подобное управление практически исключено, поскольку с увеличением нагрузки (скольжения) резко падает магнитный поток
- 3. Для компенсации падения напряжения во внутренних сопротивлениях преобразователя UZF и возможных колебаний напряжения его питающей сети
- 4. Вторая координата выбирается с учетом уменьшения теплоотвода заторможенного двигателя (в режиме динамического торможения) из условий ограничения
- 5. В статическом режиме разомкнутая система частотного управления с приведенными выше соотношениями U1/f1 практически обеспечивает сохранение номинальной
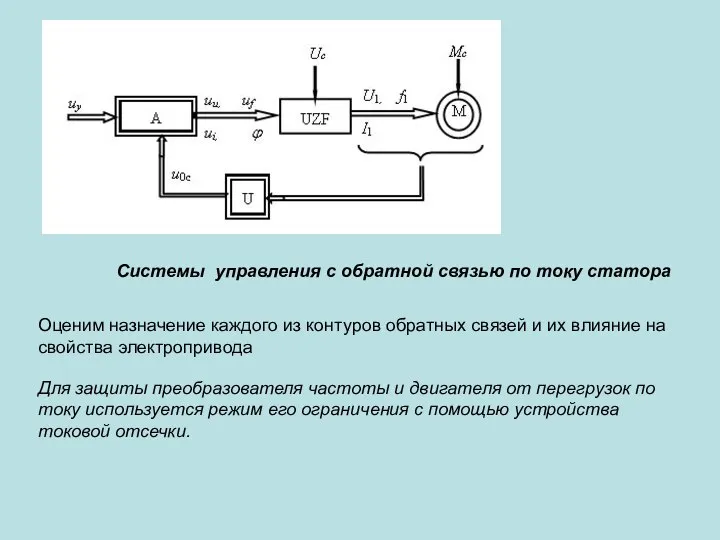
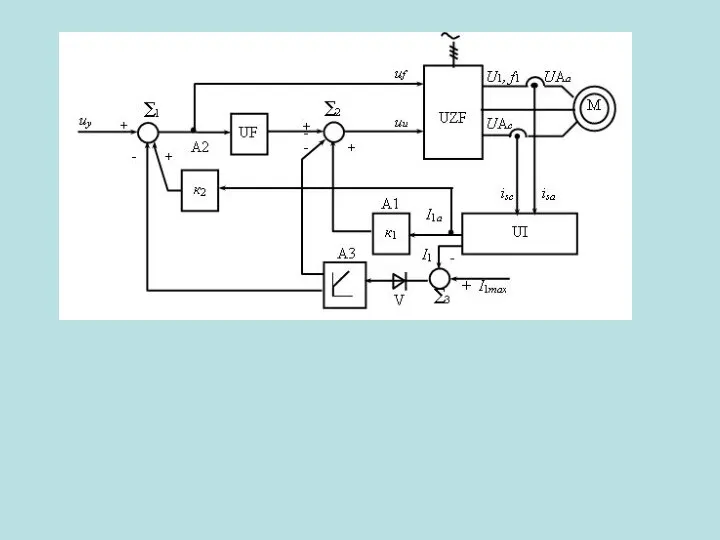
- 6. Системы управления с обратной связью по току статора Оценим назначение каждого из контуров обратных связей и
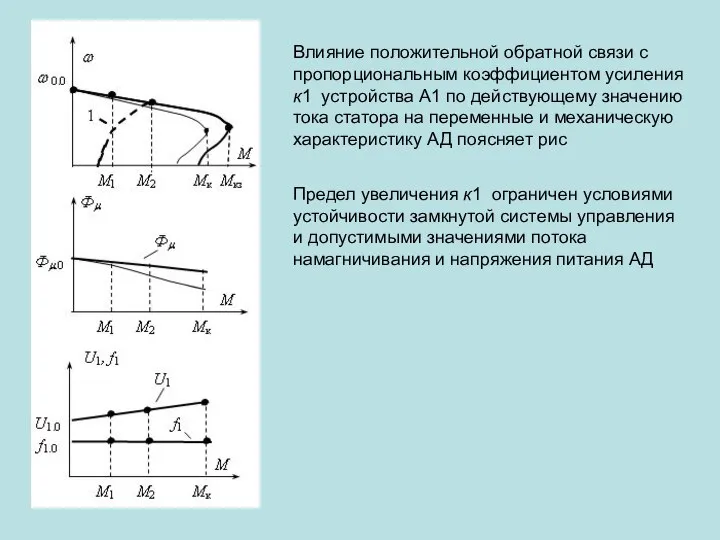
- 8. Влияние положительной обратной связи с пропорциональным коэффициентом усиления к1 устройства А1 по действующему значению тока статора
- 9. Если в качестве сигнала обратной связи принять активную составляющую тока статора , то регулирование скорости будет
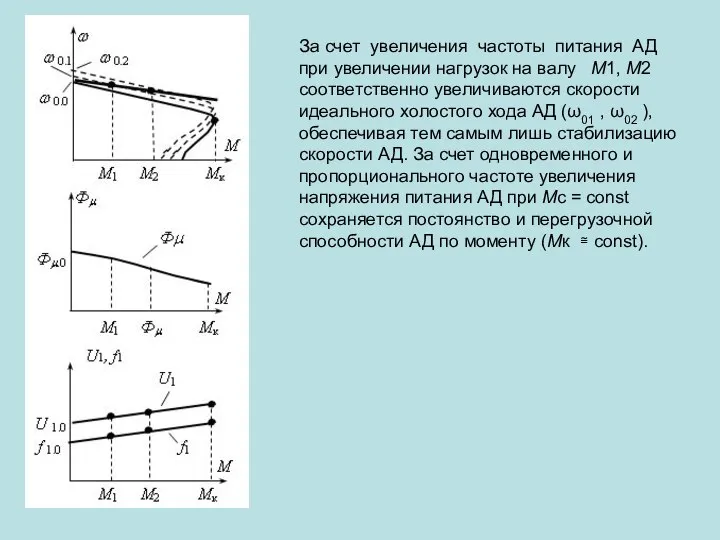
- 10. За счет увеличения частоты питания АД при увеличении нагрузок на валу М1, М2 соответственно увеличиваются скорости
- 11. Совокупность положительных обратных связей по току с использованием устройств А1 и А2, за счет стабилизации скорости
- 12. Системы управления с обратной связью по скорости двигателя
- 13. Увеличение диапазона регулирования по скорости АД можно получить дополнением в схему отрицательной обратной связи по скорости
- 14. Структурная схема линеаризованной системы при работе АД на участке механической характеристики в пределах значений абсолютного скольжения
- 15. кпч = Δω0 / Δuрс = 2π Δf1 /рп Δuрс Wрс(p) = Δuрс/Δuу = крс +
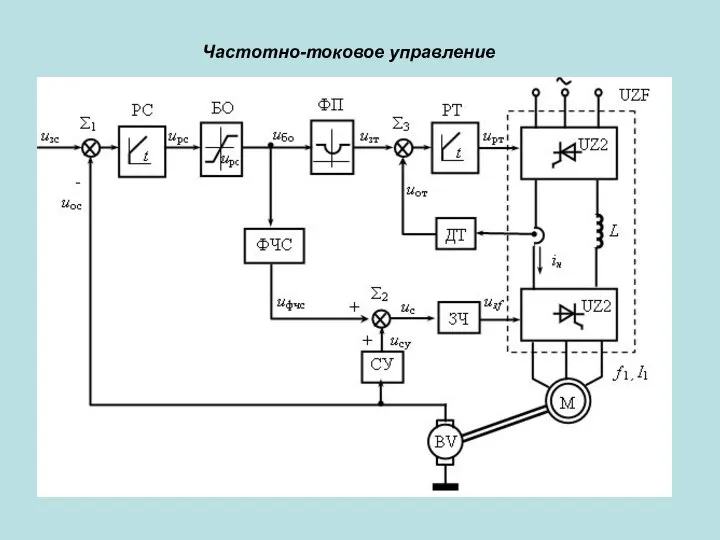
- 16. Частотно-токовое управление
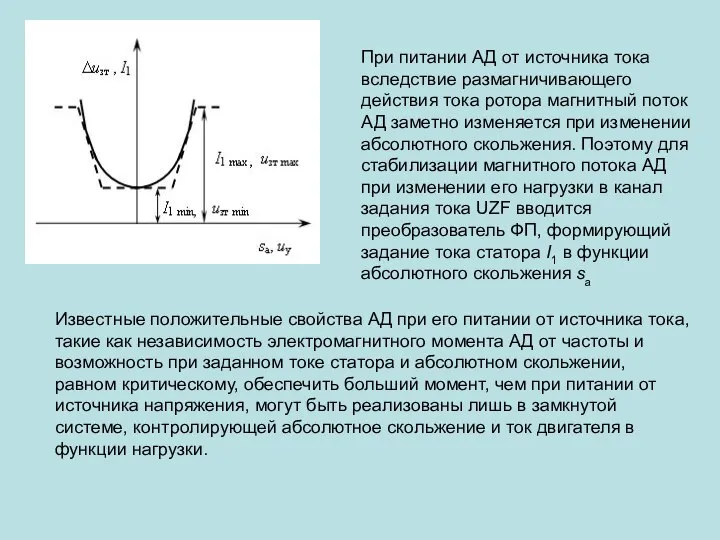
- 17. При питании АД от источника тока вследствие размагничивающего действия тока ротора магнитный поток АД заметно изменяется
- 18. Сигнал, пропорциональный sа, формируется на выходе РС, поскольку uз.с пропорционально заданию скорости ω0.з идеального холостого хода
- 19. Перед пуском двигателя (uз.с = 0, uрс = 0) сигнал задания частоты преобразователя uз.f = 0
- 20. Δ uз.f = кз.ч (кфчс Δuр.с + ксу кос Δω), где кз.ч = Δuз.f/Δuз.с; кфчс =
- 21. Тогда при выборе передаточных коэффициентов функциональных устройств электропривода из условия (2πкf /рп) ксу кос = 1
- 22. Результирующая жесткость механической характеристики привода в замкнутой системе невысока Более высокая точность реализуется при настройке привода
- 23. 4. Определите для электропривода по схеме рис. характер изменения частоты и напряжения на статоре двигателя, а
- 25. Скачать презентацию
В разомкнутых системах подобное управление практически исключено, поскольку с увеличением нагрузки
В разомкнутых системах подобное управление практически исключено, поскольку с увеличением нагрузки
Для компенсации падения напряжения во внутренних сопротивлениях преобразователя UZF и возможных
Для компенсации падения напряжения во внутренних сопротивлениях преобразователя UZF и возможных
Вторая координата выбирается с учетом уменьшения теплоотвода заторможенного двигателя (в режиме
Вторая координата выбирается с учетом уменьшения теплоотвода заторможенного двигателя (в режиме

В статическом режиме разомкнутая система частотного управления с приведенными выше соотношениями
В статическом режиме разомкнутая система частотного управления с приведенными выше соотношениями
Системы управления с обратной связью по току статора
Оценим назначение каждого
Системы управления с обратной связью по току статора
Оценим назначение каждого
Влияние положительной обратной связи с пропорциональным коэффициентом усиления к1 устройства А1
Влияние положительной обратной связи с пропорциональным коэффициентом усиления к1 устройства А1
Если в качестве сигнала обратной связи принять активную составляющую тока статора
Если в качестве сигнала обратной связи принять активную составляющую тока статора
За счет увеличения частоты питания АД при увеличении нагрузок на валу
За счет увеличения частоты питания АД при увеличении нагрузок на валу
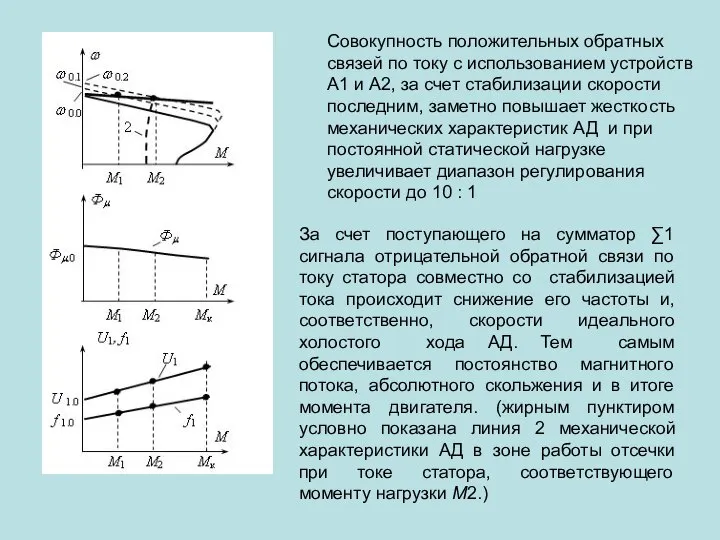
Совокупность положительных обратных связей по току с использованием устройств А1 и
Совокупность положительных обратных связей по току с использованием устройств А1 и
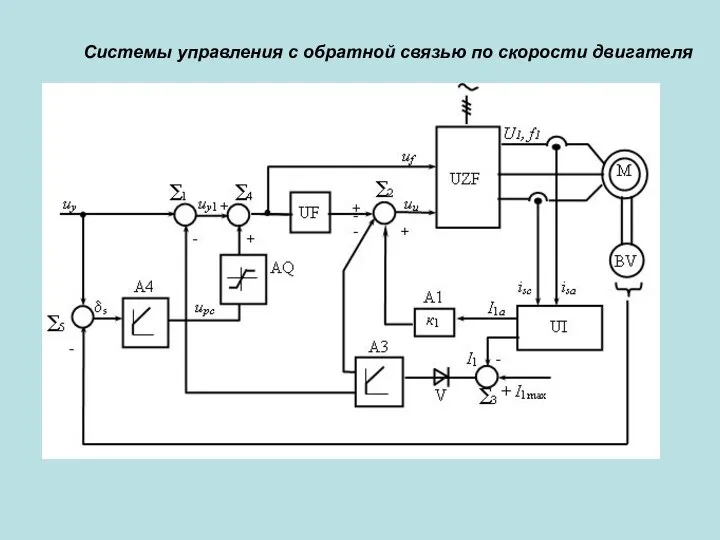
Системы управления с обратной связью по скорости двигателя
Системы управления с обратной связью по скорости двигателя
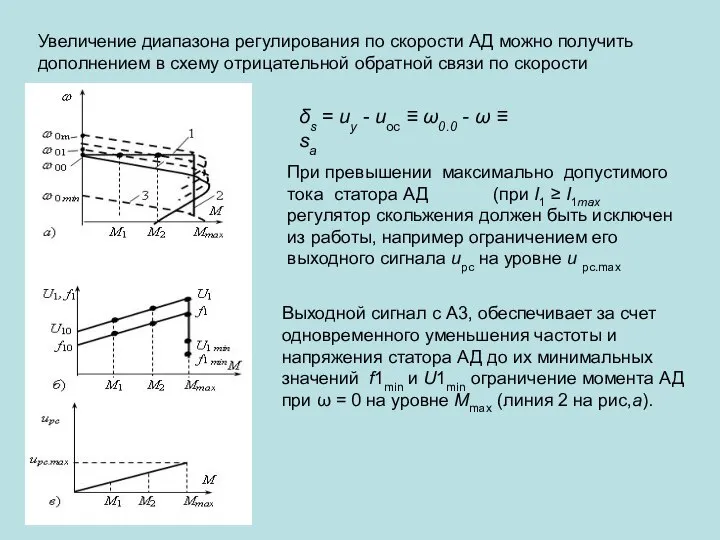
Увеличение диапазона регулирования по скорости АД можно получить дополнением в схему
Увеличение диапазона регулирования по скорости АД можно получить дополнением в схему

Структурная схема линеаризованной системы при работе АД на участке механической характеристики
Структурная схема линеаризованной системы при работе АД на участке механической характеристики
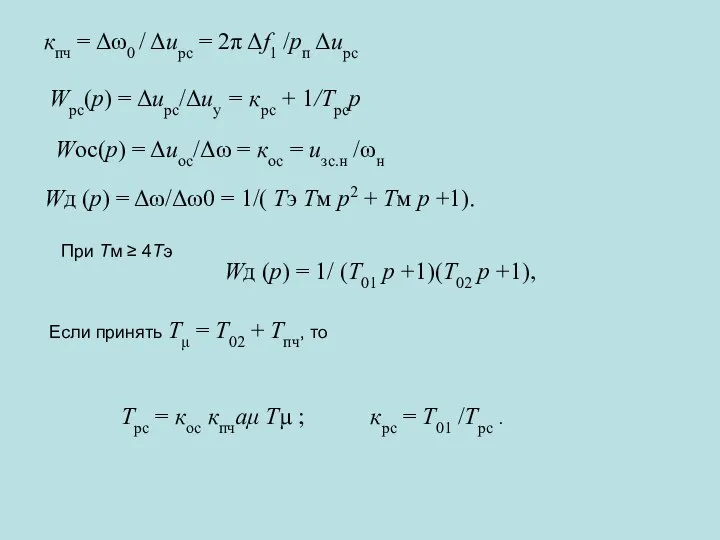
кпч = Δω0 / Δuрс = 2π Δf1 /рп Δuрс
Wрс(p)
кпч = Δω0 / Δuрс = 2π Δf1 /рп Δuрс
Wрс(p)
Частотно-токовое управление
Частотно-токовое управление
При питании АД от источника тока вследствие размагничивающего действия тока ротора
При питании АД от источника тока вследствие размагничивающего действия тока ротора
Сигнал, пропорциональный sа, формируется на выходе РС, поскольку uз.с пропорционально заданию
Сигнал, пропорциональный sа, формируется на выходе РС, поскольку uз.с пропорционально заданию
Перед пуском двигателя (uз.с = 0, uрс = 0) сигнал задания
Перед пуском двигателя (uз.с = 0, uрс = 0) сигнал задания
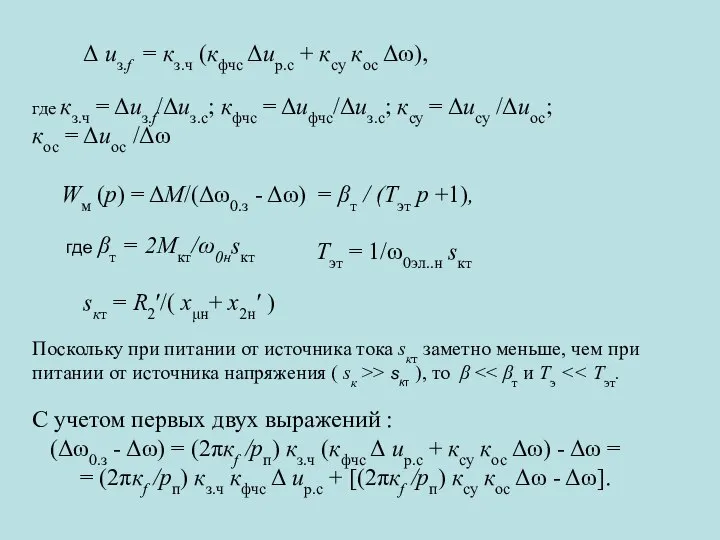
Δ uз.f = кз.ч (кфчс Δuр.с + ксу кос Δω),
где
Δ uз.f = кз.ч (кфчс Δuр.с + ксу кос Δω),
где
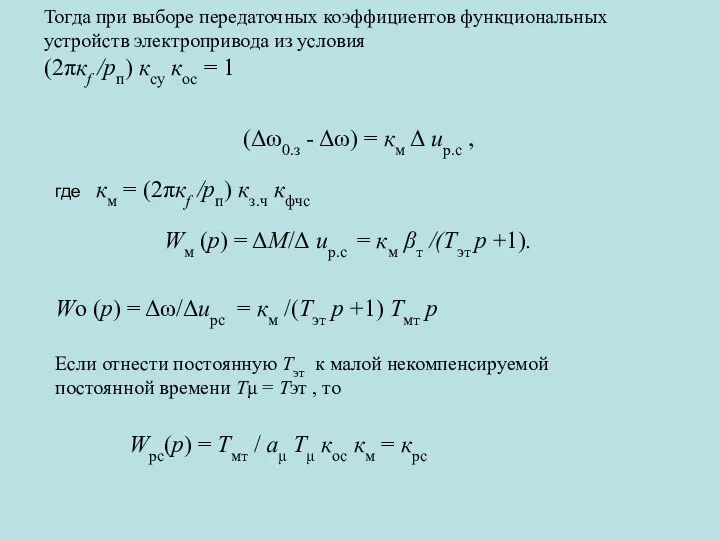
Тогда при выборе передаточных коэффициентов функциональных устройств электропривода из условия
(2πкf /рп)
Тогда при выборе передаточных коэффициентов функциональных устройств электропривода из условия
(2πкf /рп)
Результирующая жесткость механической характеристики привода в замкнутой системе невысока
Более высокая
Результирующая жесткость механической характеристики привода в замкнутой системе невысока
Более высокая
4. Определите для электропривода по схеме рис. характер изменения частоты и
4. Определите для электропривода по схеме рис. характер изменения частоты и
 Каталог подарков для мужчин и женщин
Каталог подарков для мужчин и женщин Виды декоративных штукатурок
Виды декоративных штукатурок Презентация "Самураи" - скачать презентации по МХК
Презентация "Самураи" - скачать презентации по МХК Ромашка Блума
Ромашка Блума Фет Афанасий Афанасьевич «Добровольно иду к неизбежному
Фет Афанасий Афанасьевич «Добровольно иду к неизбежному Жазық механизмдерді күштік талдау
Жазық механизмдерді күштік талдау Оболочки головного и спинного мозга
Оболочки головного и спинного мозга Your Internet Solutions Partner! Igor Kozlov i KOMANDA. - презентация
Your Internet Solutions Partner! Igor Kozlov i KOMANDA. - презентация Понятия «внешнеэкономические связи» и «внешнеэкономическая деятельность». Взаимосвязь указанных понятий с понятием «таможенное
Понятия «внешнеэкономические связи» и «внешнеэкономическая деятельность». Взаимосвязь указанных понятий с понятием «таможенное Герой Российской Федерации Крупинов Анатолий Александрович
Герой Российской Федерации Крупинов Анатолий Александрович Метод проектов в образовании школьников
Метод проектов в образовании школьников Новогодние праздники и не только: гадаем всем миром
Новогодние праздники и не только: гадаем всем миром Притча – источник народной мудрости
Притча – источник народной мудрости Функции сложного процента в оценочной деятельности
Функции сложного процента в оценочной деятельности В здоровом теле, здоровый дух
В здоровом теле, здоровый дух Функциональная организация фон-неймановской ВМ
Функциональная организация фон-неймановской ВМ Правовые основы охраны здоровья, трудовое право. Охрана труда
Правовые основы охраны здоровья, трудовое право. Охрана труда Процессор. История развития
Процессор. История развития Презентация на тему "Технология организации и проведения воспитательных дел" - скачать презентации по Педагогике
Презентация на тему "Технология организации и проведения воспитательных дел" - скачать презентации по Педагогике СВОБОДНОЕ
СВОБОДНОЕ To what degree anime culture can affect youth’s psychology and behaviors
To what degree anime culture can affect youth’s psychology and behaviors СТАРИННЫЕ ЗАДАЧИ НА ДРОБИ Открытый урок учителя математики 1 категории Черновой Галины Петровны
СТАРИННЫЕ ЗАДАЧИ НА ДРОБИ Открытый урок учителя математики 1 категории Черновой Галины Петровны  Трудовой договор
Трудовой договор Уровни корпоративной культуры
Уровни корпоративной культуры презентация Г.Тукай - презентация для начальной школы
презентация Г.Тукай - презентация для начальной школы МАРК ТВЕН (1835 – 1910) «Первый по-настоящему американский писатель
МАРК ТВЕН (1835 – 1910) «Первый по-настоящему американский писатель Послание к Ефесянам
Послание к Ефесянам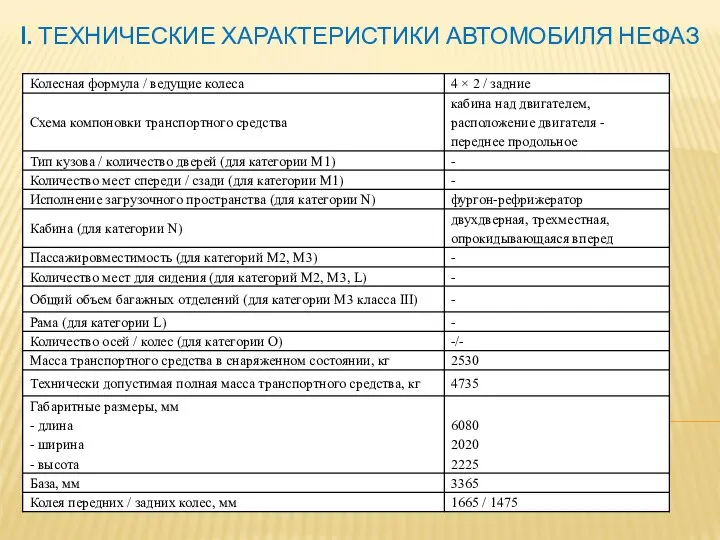 Технические характеристики автомобиля НЕФАЗ
Технические характеристики автомобиля НЕФАЗ