- Принцип работы асинхронных вентильных каскадов

Содержание
- 2. Принцип регулирования скорости асинхронного двигателя в каскадных схемах заключается во введении в роторную цепь добавочной ЭДС
- 3. Недостатки: низкая жёсткость характеристик; завышенная мощность машины постоянного тока М2 каскад электрический Энергия скольжения в данном
- 4. Для анализа характеристик каскадов рассмотрим схему замещения роторной цепи двигателя ЕdpoS = En+Idp⋅Rэ; где Rэ =
- 5. Отсюда М=(1/ωо)⋅[Edрo – (mв /2π)Хд⋅Idp]⋅Idp Выражая значение скольжения в режиме холостого хода (при Idp= 0), получим
- 6. Система управления асинхронно-вентильным каскадом с суммирующим усилителем
- 7. Для получения выражения статических характеристик замкнутой системы АВК и их анализа запишем уравнения электрического равновесия для
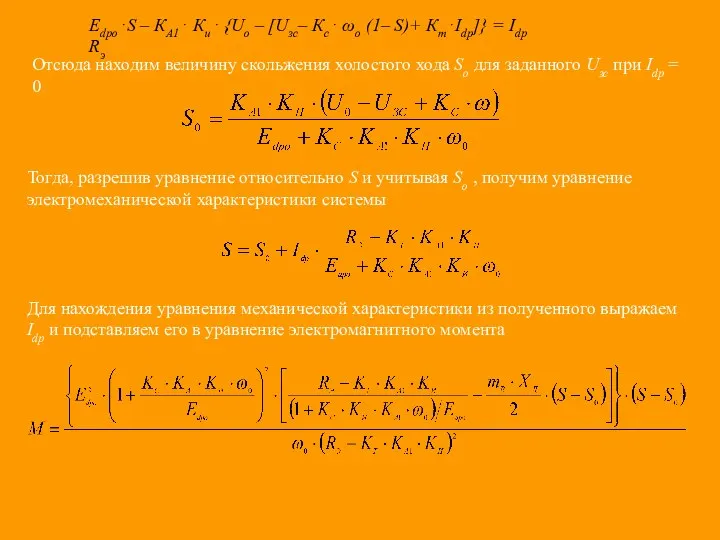
- 8. Edpo⋅S – КА1⋅ Ки⋅ {Uо – [Uзс– Кс⋅ ωо (1– S)+ Кт⋅Idp]} = Idp Rэ Отсюда
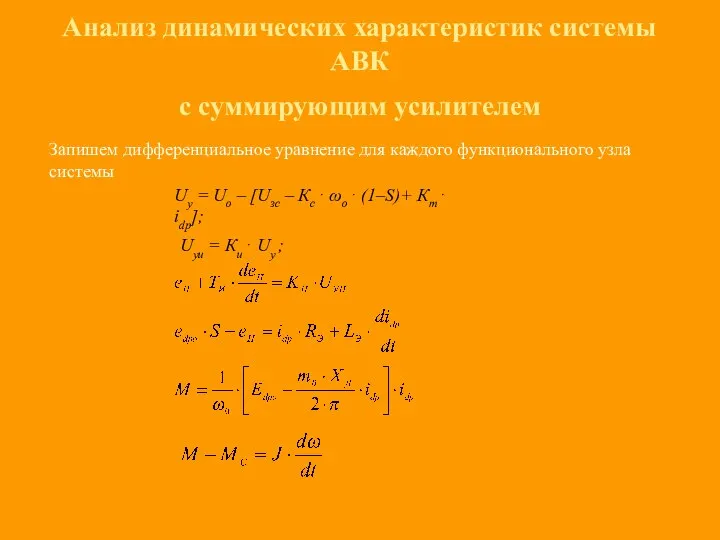
- 9. Анализ динамических характеристик системы АВК с суммирующим усилителем Запишем дифференциальное уравнение для каждого функционального узла системы
- 10. Для упрощения анализа можно составить структурную схему системы Однако этому препятствуют две нелинейности: Для большинства практических
- 12. где Кз = КА1⋅Ки⋅ ωо /Edрo; Т2 = J⋅RЭ1⋅ ωо/(CМ1⋅Edрo); а3 = Ти⋅ТЭ1⋅Т2; а2 = (Ти+ТЭ1)⋅Т2;
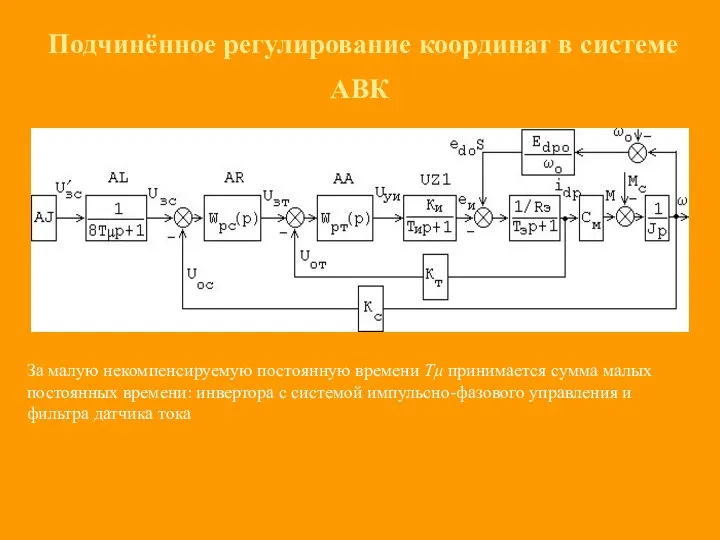
- 13. Подчинённое регулирование координат в системе АВК За малую некомпенсируемую постоянную времени Тμ принимается сумма малых постоянных
- 14. Пренебрегая внутренней обратной связью по ЭДС ротора, оптимизацию контура тока можно осуществить по техническому оптимуму. Используя
- 15. Передаточная функция оптимизированного контура скорости опишется выражением электромеханическая характеристика будет иметь подобный вид, как и для
- 17. Скачать презентацию
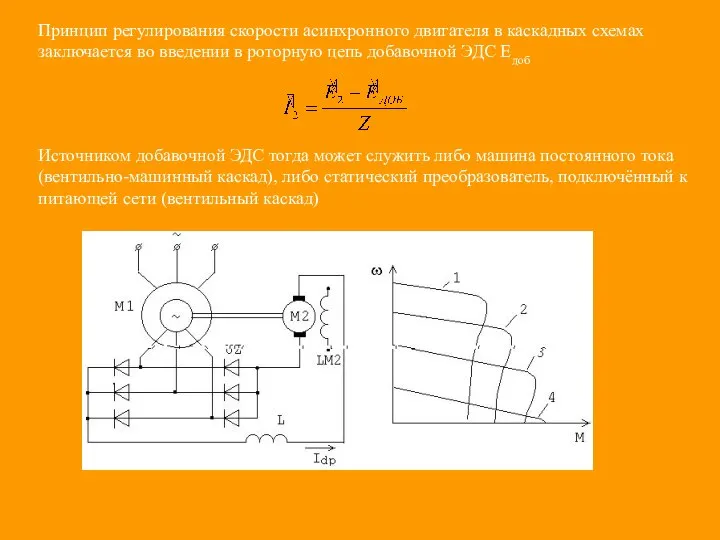
Принцип регулирования скорости асинхронного двигателя в каскадных схемах заключается во введении
Принцип регулирования скорости асинхронного двигателя в каскадных схемах заключается во введении
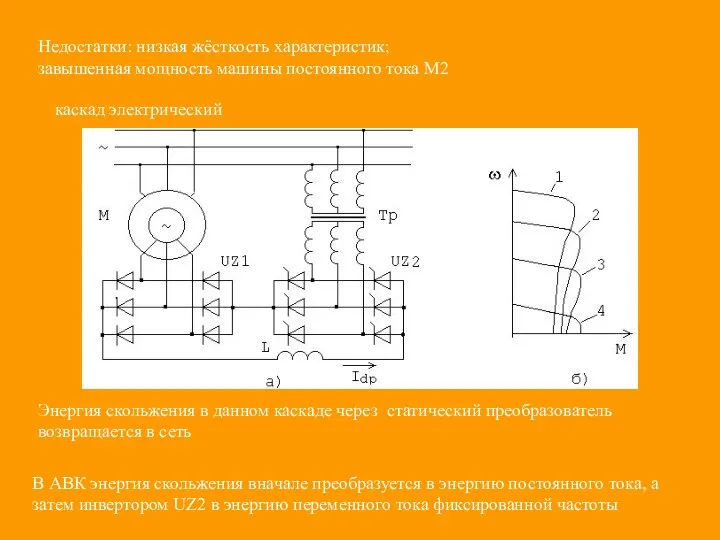
Недостатки: низкая жёсткость характеристик;
завышенная мощность машины постоянного тока М2
каскад
Недостатки: низкая жёсткость характеристик;
завышенная мощность машины постоянного тока М2
каскад
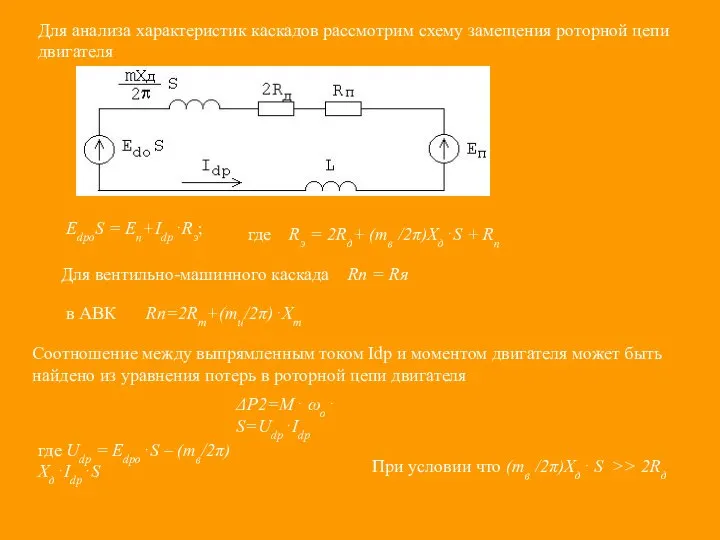
Для анализа характеристик каскадов рассмотрим схему замещения роторной цепи двигателя
ЕdpoS
Для анализа характеристик каскадов рассмотрим схему замещения роторной цепи двигателя
ЕdpoS
![Отсюда М=(1/ωо)⋅[Edрo – (mв /2π)Хд⋅Idp]⋅Idp Выражая значение скольжения в режиме холостого](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1293990/slide-4.jpg)
Отсюда
М=(1/ωо)⋅[Edрo – (mв /2π)Хд⋅Idp]⋅Idp
Выражая значение скольжения в режиме холостого хода
Отсюда
М=(1/ωо)⋅[Edрo – (mв /2π)Хд⋅Idp]⋅Idp
Выражая значение скольжения в режиме холостого хода

Система управления асинхронно-вентильным каскадом с суммирующим усилителем
Система управления асинхронно-вентильным каскадом с суммирующим усилителем
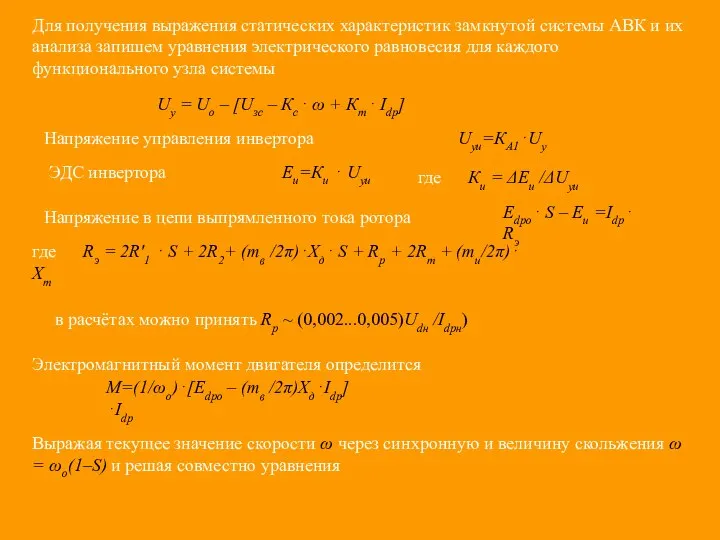
Для получения выражения статических характеристик замкнутой системы АВК и их анализа
Для получения выражения статических характеристик замкнутой системы АВК и их анализа
Edpo⋅S – КА1⋅ Ки⋅ {Uо – [Uзс– Кс⋅ ωо (1– S)+
Edpo⋅S – КА1⋅ Ки⋅ {Uо – [Uзс– Кс⋅ ωо (1– S)+
Анализ динамических характеристик системы АВК
с суммирующим усилителем
Запишем дифференциальное уравнение
Анализ динамических характеристик системы АВК
с суммирующим усилителем
Запишем дифференциальное уравнение
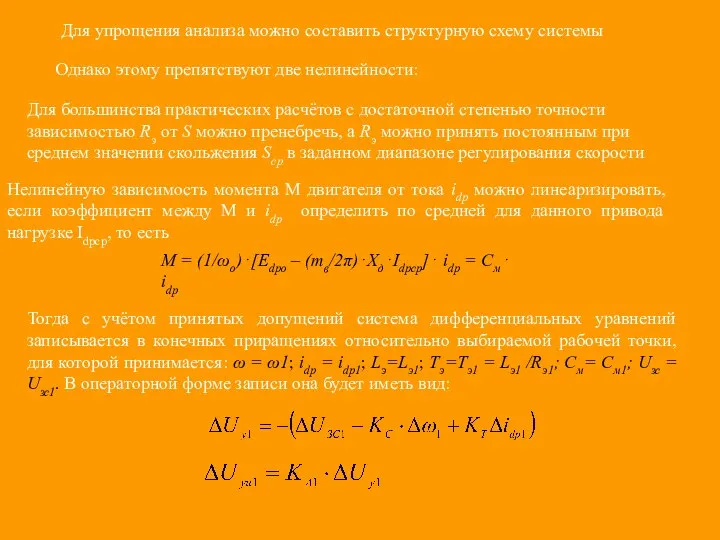
Для упрощения анализа можно составить структурную схему системы
Однако этому препятствуют
Для упрощения анализа можно составить структурную схему системы
Однако этому препятствуют
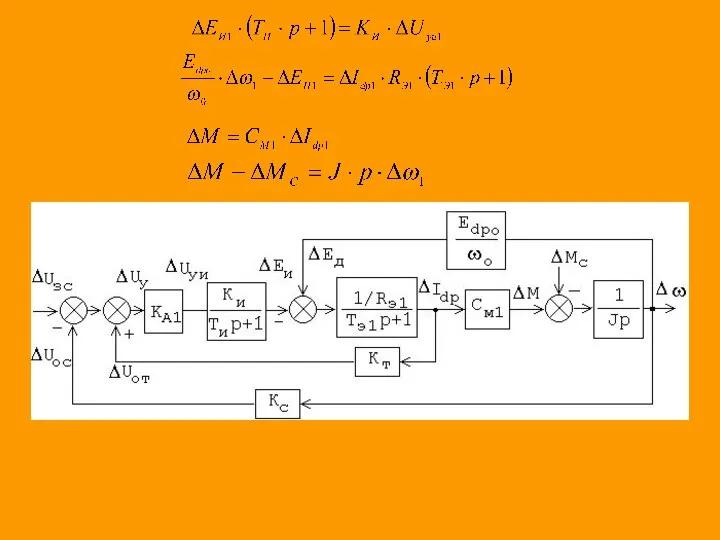
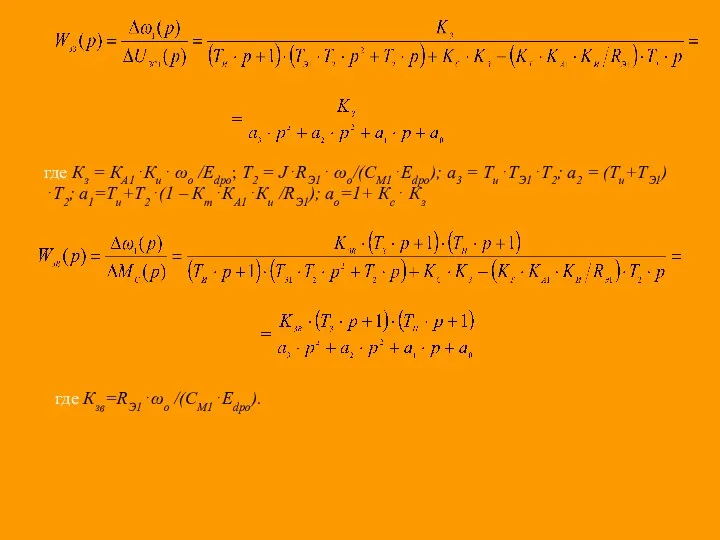
где Кз = КА1⋅Ки⋅ ωо /Edрo; Т2 = J⋅RЭ1⋅ ωо/(CМ1⋅Edрo); а3
где Кз = КА1⋅Ки⋅ ωо /Edрo; Т2 = J⋅RЭ1⋅ ωо/(CМ1⋅Edрo); а3
Подчинённое регулирование координат в системе АВК
За малую некомпенсируемую постоянную времени
Подчинённое регулирование координат в системе АВК
За малую некомпенсируемую постоянную времени
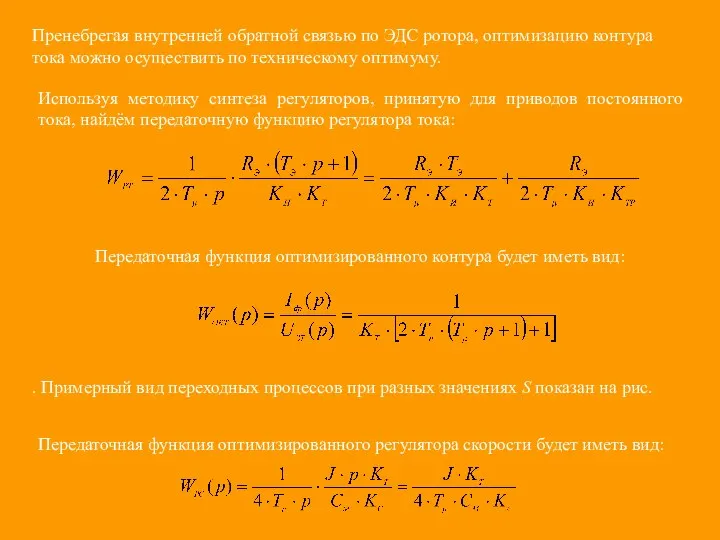
Пренебрегая внутренней обратной связью по ЭДС ротора, оптимизацию контура тока можно
Пренебрегая внутренней обратной связью по ЭДС ротора, оптимизацию контура тока можно
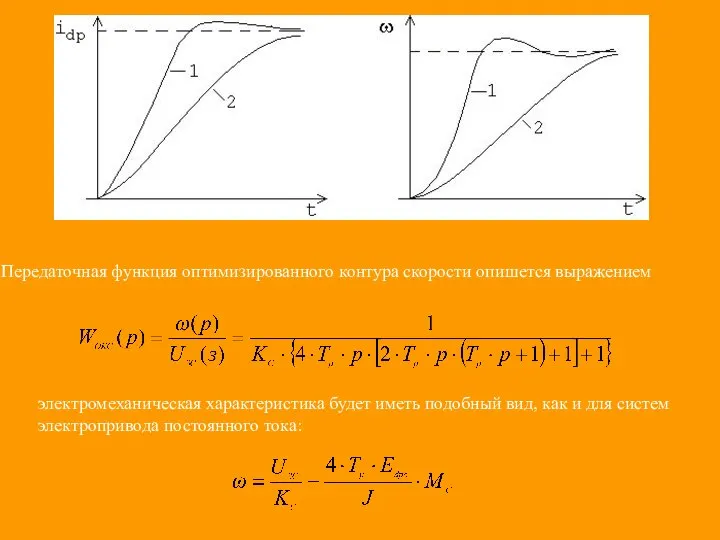
Передаточная функция оптимизированного контура скорости опишется выражением
электромеханическая характеристика будет иметь
Передаточная функция оптимизированного контура скорости опишется выражением
электромеханическая характеристика будет иметь
 Сварка при монтаже трубопроводов водоснабжения
Сварка при монтаже трубопроводов водоснабжения Десятичные и натуральные логарифмы - презентация по Алгебре
Десятичные и натуральные логарифмы - презентация по Алгебре Сеть заведений быстрого питания
Сеть заведений быстрого питания Состав и выбор методов ИСУ
Состав и выбор методов ИСУ альбом [Автосохраненный]
альбом [Автосохраненный] Конституция России
Конституция России Токовые защиты. Принцип действия и классификация токовых защит
Токовые защиты. Принцип действия и классификация токовых защит Mein Leiblingtier
Mein Leiblingtier Презентация "Казахстанский фондовый рынок: юность заканчивается" - скачать презентации по Экономике
Презентация "Казахстанский фондовый рынок: юность заканчивается" - скачать презентации по Экономике Виклики для сучасної демократії: українське та польське бачення
Виклики для сучасної демократії: українське та польське бачення урок
урок Мода 90х годов ХХ века.
Мода 90х годов ХХ века. Искусство Фландрии и Голландии XVII века
Искусство Фландрии и Голландии XVII века Устойчивость и оптимизация при изгибе
Устойчивость и оптимизация при изгибе Индексный метод
Индексный метод  Отчет о работе в 2018 году спортивной школы олимпийского резерва «Атлетика»
Отчет о работе в 2018 году спортивной школы олимпийского резерва «Атлетика» Методы финансовых и коммерческих расчетов в оценочной деятельности
Методы финансовых и коммерческих расчетов в оценочной деятельности  Презентация Безопасность пищевых продуктов
Презентация Безопасность пищевых продуктов ООН не признала Иерусалим столицей Израиля
ООН не признала Иерусалим столицей Израиля Бог – громовержец Зевс Выполнила: учитель МХК МКОУ «Яманская СОШ» Потёмкина Татьяна Михайловна
Бог – громовержец Зевс Выполнила: учитель МХК МКОУ «Яманская СОШ» Потёмкина Татьяна Михайловна Коллективный договор как фактор мотивации профсоюзного членства
Коллективный договор как фактор мотивации профсоюзного членства Московские метаморфозы про Зарядье
Московские метаморфозы про Зарядье Основы наноэлектроники и нанотехнологий. Наноэлектроника. (Лекция 2)
Основы наноэлектроники и нанотехнологий. Наноэлектроника. (Лекция 2) Галерея великих математиков - презентация по Алгебре
Галерея великих математиков - презентация по Алгебре Технология Near Field Communication (NFC)
Технология Near Field Communication (NFC) Особенности судебного разбирательства в суде с участием присяжных заседателей. (Тема 3.3)
Особенности судебного разбирательства в суде с участием присяжных заседателей. (Тема 3.3) Джим Керри –известнейший актер и комик
Джим Керри –известнейший актер и комик Функциональная анатомия мочевой системы
Функциональная анатомия мочевой системы