- Т20 АЗРН3.ppt

Содержание
- 2. * Навігаційне забезпечення ведення бойових дій на малих та гранично малих висотах. РЛС профільного польоту. Навчальна
- 3. * Контрольні завдання (АЗРН3) Як впливає ширина ДСА в горизонтальній площині на якість інформації про підстилаючу
- 4. * Маловисотний політ – ефективний спосіб подолання ППО: Дальність виявлення літака над сферичною поверхнею Землі обмежена
- 5. Проблеми, що виникають на борту при польотах і веденні бойових дій на малих висотах: Велика ймовірність
- 6. * Інформаційне забезпечення маловисотного польоту (МВП) Необхідне інформаційне забезпечення: - детальна достовірна і гарантована інформація про
- 7. * Способи інформаційного забезпечення МВП 1. Використання високоточних топографічних карт і високоточних навігаційних систем. Обмеження: -
- 8. * Основні вимоги до технічного засобу інформаційного забезпечення МВП Вимоги до технічного засобу отримання інформації про
- 9. * Способи виконання МВП Політ на безпечній висоті: просте інформаційне забезпечення, просте пілотування, можливість автоматизації, можливе
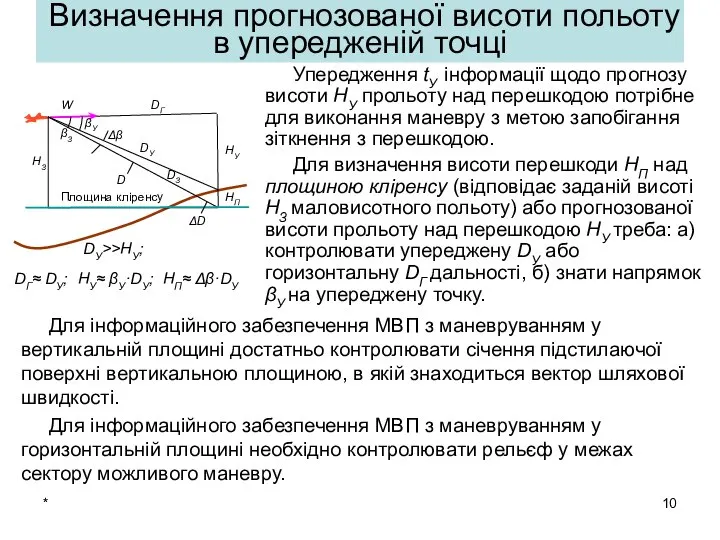
- 10. * Визначення прогнозованої висоти польоту в упередженій точці Упередження tУ інформації щодо прогнозу висоти НУ прольоту
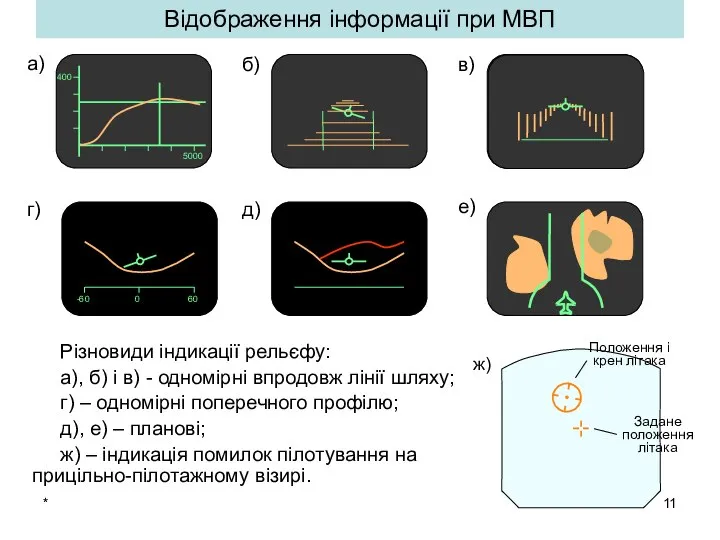
- 11. * Відображення інформації при МВП Різновиди індикації рельєфу: а), б) і в) - одномірні впродовж лінії
- 12. Призначення, склад і характеристики системи забезпечення МВП 7. Радіолокаційна станція профільного польоту Бортова система забезпечення МВП
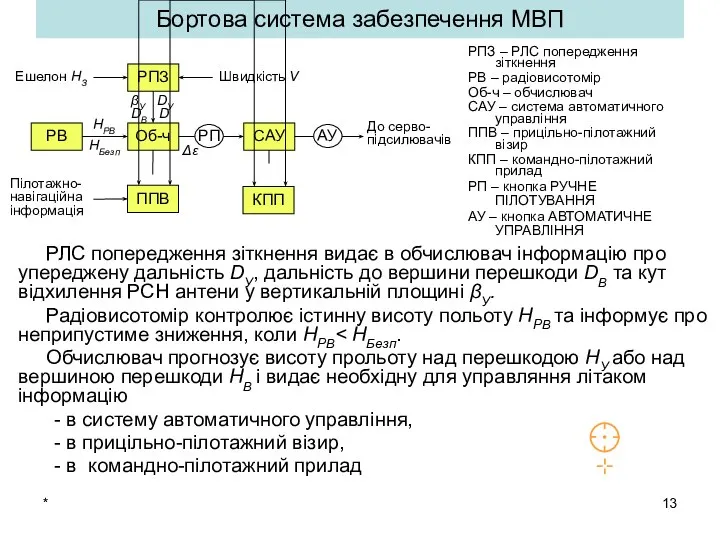
- 13. * Бортова система забезпечення МВП РПЗ – РЛС попередження зіткнення РВ – радіовисотомір Об-ч – обчислювач
- 14. Інформаційне забезпечення управління літаком при МВП При польоті на заданій висоті НЗ над рівниною та негористою
- 15. * Контроль рельєфу і місцевих об'єктів по курсу польоту в межах ділянки, яка забезпечує вчасну оцінку
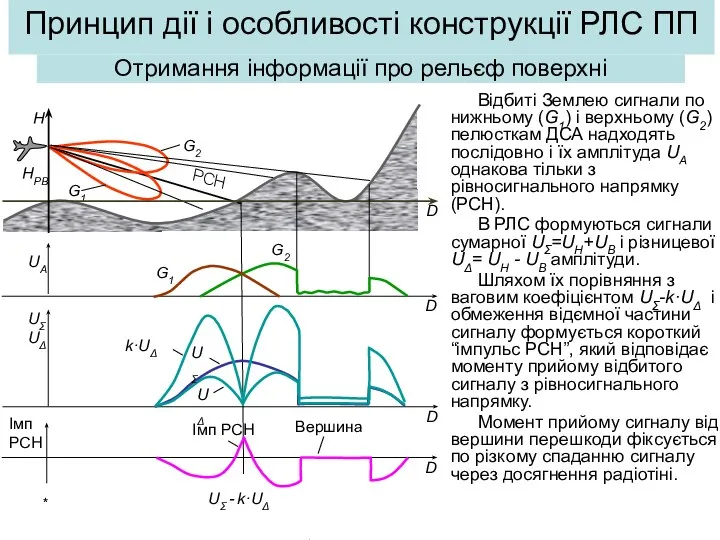
- 16. * Отримання інформації про рельєф поверхні Принцип дії і особливості конструкції РЛС ПП Відбиті Землею сигнали
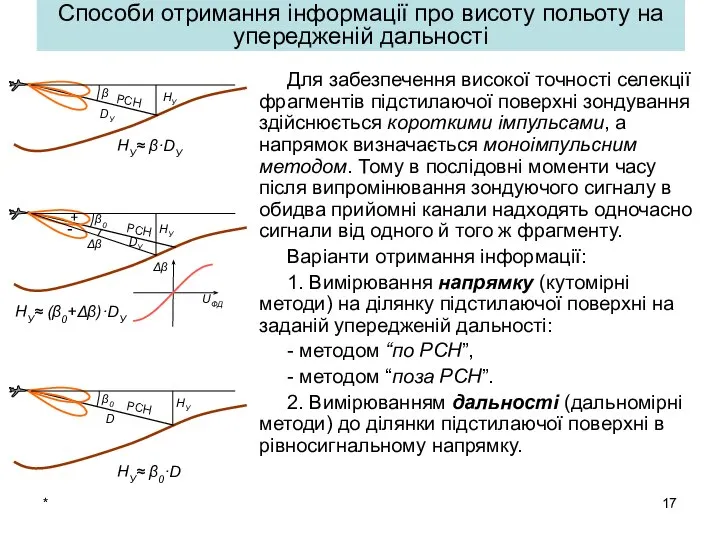
- 17. * Способи отримання інформації про висоту польоту на упередженій дальності Для забезпечення високої точності селекції фрагментів
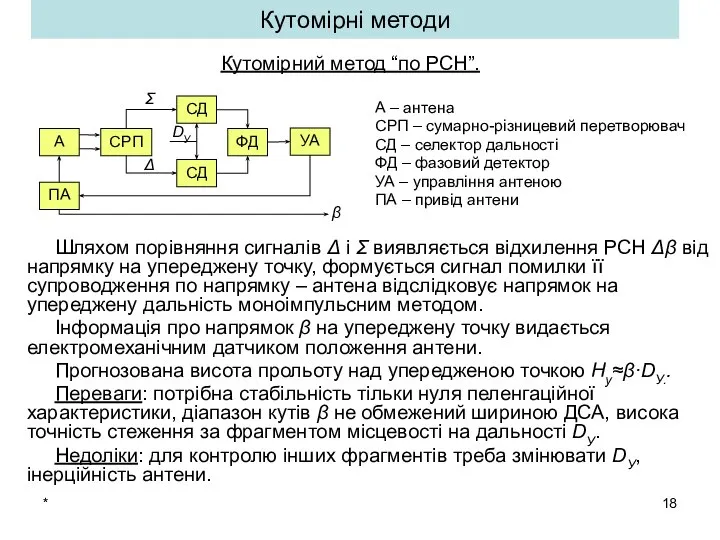
- 18. * Шляхом порівняння сигналів Δ і Σ виявляється відхилення РСН Δβ від напрямку на упереджену точку,
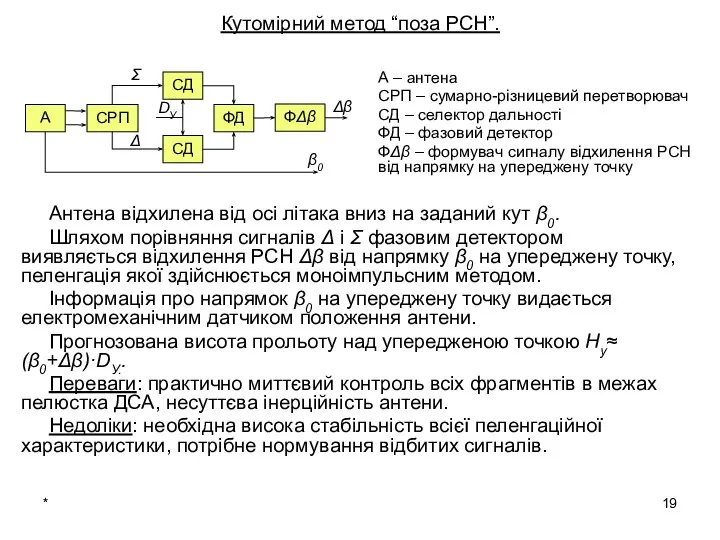
- 19. * Антена відхилена від осі літака вниз на заданий кут β0. Шляхом порівняння сигналів Δ і
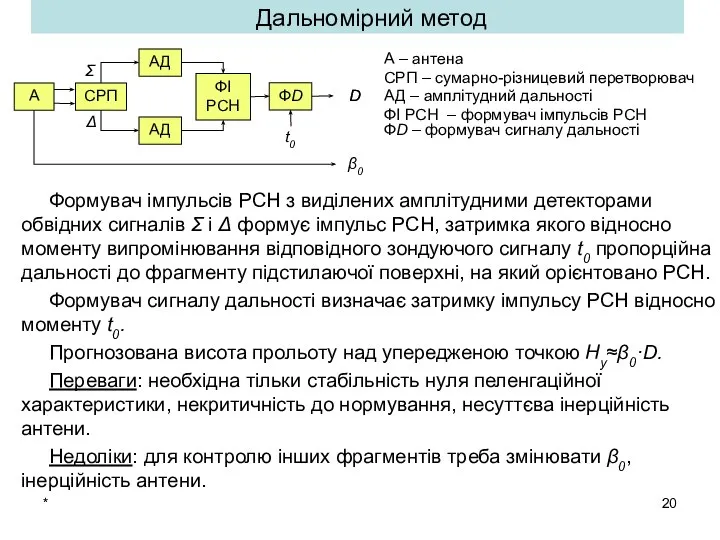
- 20. * Дальномірний метод Формувач імпульсів РСН з виділених амплітудними детекторами обвідних сигналів Σ і Δ формує
- 21. * Принцип дії і особливості конструкції РЛС ПП РЛС профільного польоту літак Су-24 входить до складу
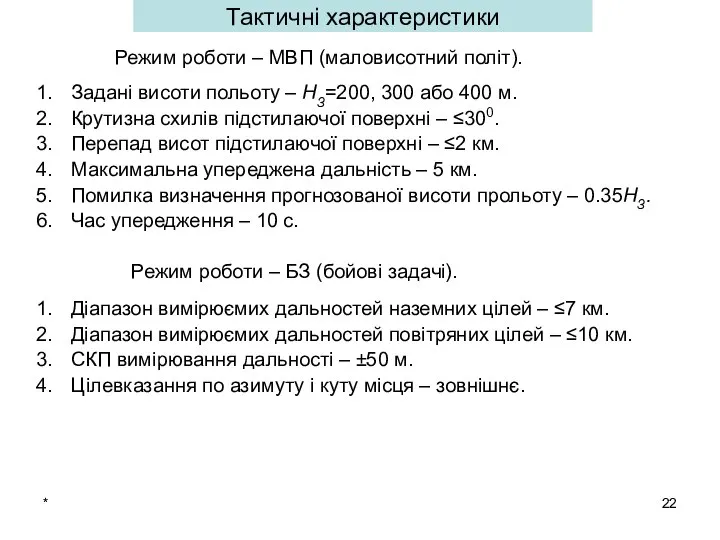
- 22. * Тактичні характеристики Режим роботи – МВП (маловисотний політ). Задані висоти польоту – НЗ=200, 300 або
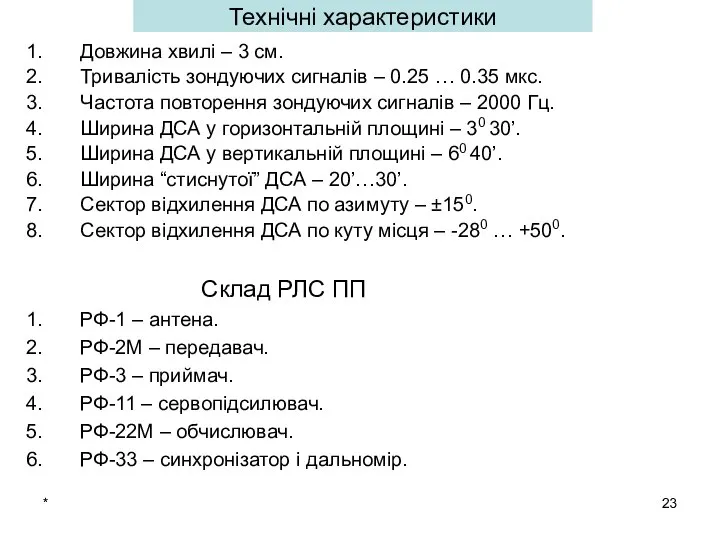
- 23. * Довжина хвилі – 3 см. Тривалість зондуючих сигналів – 0.25 … 0.35 мкс. Частота повторення
- 24. Принцип дії РЛС ПП (структурна схема) СРП – сумарно-різницевий перетворювач АП – антенний перемикач Прд, Прм
- 25. Режим МВП В обчислювачі виміряна дальність D порівнюється з розрахованою упередженою дальністю DУ і виробляється сигнал
- 26. * Коли дальня границя області радіотіні стане меншою упередженої дальності, РЛС перейде в звичайний режим роботи.
- 27. * Питання для самоконтролю Особливості навігаційного забезпечення польотів і бойових дій на малих і гранично малих
- 29. Скачать презентацию
*
Навігаційне забезпечення ведення бойових дій на малих та гранично малих висотах.
РЛС
*
Навігаційне забезпечення ведення бойових дій на малих та гранично малих висотах.
РЛС
*
Контрольні завдання (АЗРН3)
Як впливає ширина ДСА в горизонтальній площині на якість
*
Контрольні завдання (АЗРН3)
Як впливає ширина ДСА в горизонтальній площині на якість
*
Маловисотний політ – ефективний спосіб подолання ППО:
Дальність виявлення літака над сферичною
*
Маловисотний політ – ефективний спосіб подолання ППО:
Дальність виявлення літака над сферичною
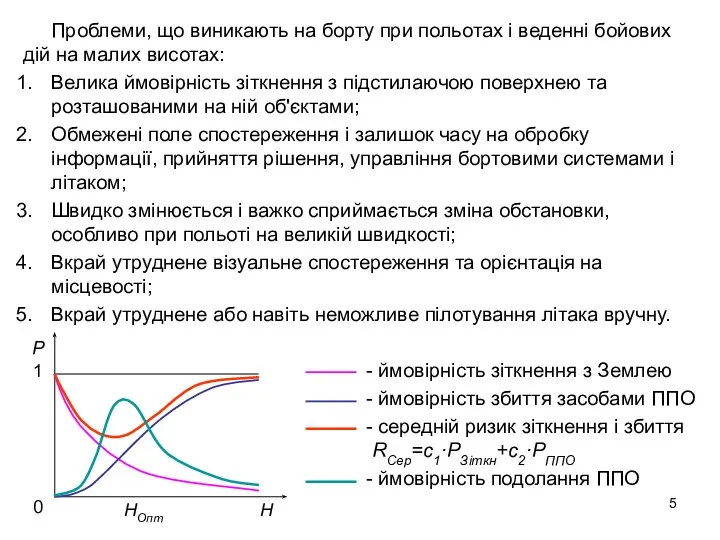
Проблеми, що виникають на борту при польотах і веденні бойових дій
Проблеми, що виникають на борту при польотах і веденні бойових дій
*
Інформаційне забезпечення маловисотного польоту (МВП)
Необхідне інформаційне забезпечення:
- детальна достовірна і
*
Інформаційне забезпечення маловисотного польоту (МВП)
Необхідне інформаційне забезпечення:
- детальна достовірна і
*
Способи інформаційного забезпечення МВП
1. Використання високоточних топографічних карт і високоточних навігаційних
*
Способи інформаційного забезпечення МВП
1. Використання високоточних топографічних карт і високоточних навігаційних
*
Основні вимоги до технічного засобу інформаційного забезпечення МВП
Вимоги до технічного засобу
*
Основні вимоги до технічного засобу інформаційного забезпечення МВП
Вимоги до технічного засобу
*
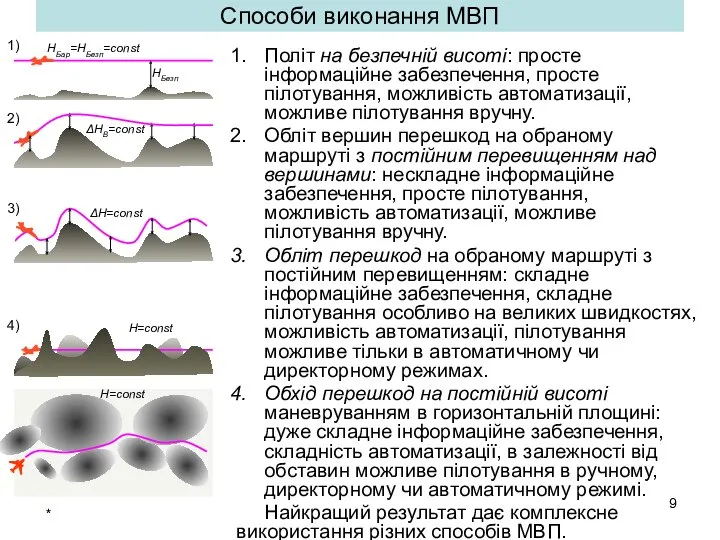
Способи виконання МВП
Політ на безпечній висоті: просте інформаційне забезпечення, просте пілотування,
*
Способи виконання МВП
Політ на безпечній висоті: просте інформаційне забезпечення, просте пілотування,
*
Визначення прогнозованої висоти польоту в упередженій точці
Упередження tУ інформації щодо прогнозу
*
Визначення прогнозованої висоти польоту в упередженій точці
Упередження tУ інформації щодо прогнозу
*
Відображення інформації при МВП
Різновиди індикації рельєфу:
а), б) і в) - одномірні
*
Відображення інформації при МВП
Різновиди індикації рельєфу:
а), б) і в) - одномірні
Призначення, склад і характеристики системи забезпечення МВП
7. Радіолокаційна станція профільного польоту
Бортова
Призначення, склад і характеристики системи забезпечення МВП
7. Радіолокаційна станція профільного польоту
Бортова
*
Бортова система забезпечення МВП
РПЗ – РЛС попередження зіткнення
РВ – радіовисотомір
Об-ч
*
Бортова система забезпечення МВП
РПЗ – РЛС попередження зіткнення
РВ – радіовисотомір
Об-ч
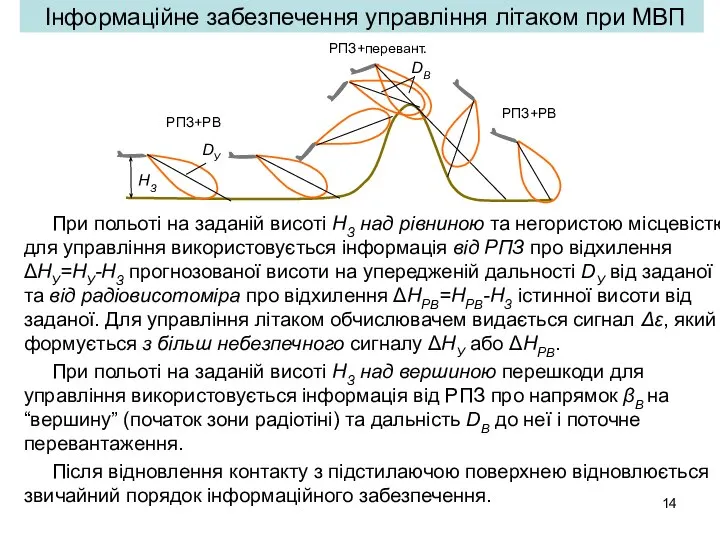
Інформаційне забезпечення управління літаком при МВП
При польоті на заданій висоті
Інформаційне забезпечення управління літаком при МВП
При польоті на заданій висоті
*
Контроль рельєфу і місцевих об'єктів по курсу польоту в межах ділянки,
*
Контроль рельєфу і місцевих об'єктів по курсу польоту в межах ділянки,
*
Отримання інформації про рельєф поверхні
Принцип дії і особливості конструкції РЛС ПП
Відбиті
*
Отримання інформації про рельєф поверхні
Принцип дії і особливості конструкції РЛС ПП
Відбиті
*
Способи отримання інформації про висоту польоту на упередженій дальності
Для забезпечення високої
*
Способи отримання інформації про висоту польоту на упередженій дальності
Для забезпечення високої
*
Шляхом порівняння сигналів Δ і Σ виявляється відхилення РСН Δβ
*
Шляхом порівняння сигналів Δ і Σ виявляється відхилення РСН Δβ
*
Антена відхилена від осі літака вниз на заданий кут β0.
Шляхом
*
Антена відхилена від осі літака вниз на заданий кут β0.
Шляхом
*
Дальномірний метод
Формувач імпульсів РСН з виділених амплітудними детекторами обвідних сигналів Σ
*
Дальномірний метод
Формувач імпульсів РСН з виділених амплітудними детекторами обвідних сигналів Σ
*
Принцип дії і особливості конструкції РЛС ПП
РЛС профільного польоту літак Су-24
*
Принцип дії і особливості конструкції РЛС ПП
РЛС профільного польоту літак Су-24
*
Тактичні характеристики
Режим роботи – МВП (маловисотний політ).
Задані висоти польоту – НЗ=200,
*
Тактичні характеристики
Режим роботи – МВП (маловисотний політ).
Задані висоти польоту – НЗ=200,
*
Довжина хвилі – 3 см.
Тривалість зондуючих сигналів – 0.25 … 0.35
*
Довжина хвилі – 3 см.
Тривалість зондуючих сигналів – 0.25 … 0.35
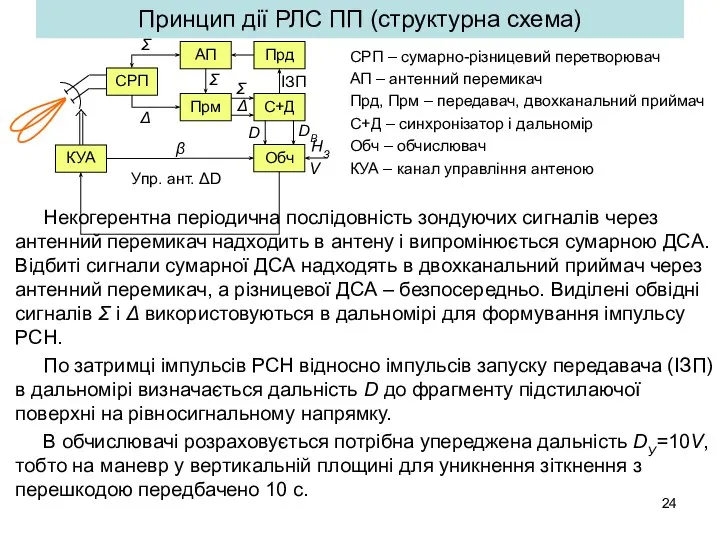
Принцип дії РЛС ПП (структурна схема)
СРП – сумарно-різницевий перетворювач
АП – антенний
Принцип дії РЛС ПП (структурна схема)
СРП – сумарно-різницевий перетворювач
АП – антенний
Режим МВП
В обчислювачі виміряна дальність D порівнюється з розрахованою упередженою
Режим МВП
В обчислювачі виміряна дальність D порівнюється з розрахованою упередженою
*
Коли дальня границя області радіотіні стане меншою упередженої дальності, РЛС перейде
*
Коли дальня границя області радіотіні стане меншою упередженої дальності, РЛС перейде
*
Питання для самоконтролю
Особливості навігаційного забезпечення польотів і бойових дій на
*
Питання для самоконтролю
Особливості навігаційного забезпечення польотів і бойових дій на
 Програмування на мові Паскаль. Цикли з умовою
Програмування на мові Паскаль. Цикли з умовою Общая реакция организма на повреждение
Общая реакция организма на повреждение  Путешествие по музеям
Путешествие по музеям Зачем магазинам электронные деньги Наталья Хайтина 3 декабря 2010 Екатеринбург
Зачем магазинам электронные деньги Наталья Хайтина 3 декабря 2010 Екатеринбург ауа
ауа  Юридические лица: понятие и признаки. Коммерческие и некоммерческие организации
Юридические лица: понятие и признаки. Коммерческие и некоммерческие организации Пути предупреждения и методы разрешения политических конфликтов Выполнила: Рассолова Олеся группа: Т082
Пути предупреждения и методы разрешения политических конфликтов Выполнила: Рассолова Олеся группа: Т082 Утилизация отходов – проблема 21 века
Утилизация отходов – проблема 21 века  Правапіс галосных. Прынцыпы беларускага правапісу
Правапіс галосных. Прынцыпы беларускага правапісу Основы динамики полёта самолетов
Основы динамики полёта самолетов  ФИЛОСОФИЯ И МЕТОДОЛОГИЯ УПРАВЛЕНИЯ
ФИЛОСОФИЯ И МЕТОДОЛОГИЯ УПРАВЛЕНИЯ Презентация Заполнение таможенной расписки
Презентация Заполнение таможенной расписки Правдивые и ложные факты об англичанах
Правдивые и ложные факты об англичанах Отношение художника к миру вещей. «Изображение предметного мира- натюрморт.» Цель: формирование навыков рационального выбора точ
Отношение художника к миру вещей. «Изображение предметного мира- натюрморт.» Цель: формирование навыков рационального выбора точ Коррупция
Коррупция Оздоровительная технология быстрого восстановления и предотвращения травматизма при интенсивных физических нагрузках
Оздоровительная технология быстрого восстановления и предотвращения травматизма при интенсивных физических нагрузках Театральное искусство и художник
Театральное искусство и художник Мотивационно-потребностная сфера личности
Мотивационно-потребностная сфера личности Обследование и дефекты железобетонных конструкций и панельных зданий
Обследование и дефекты железобетонных конструкций и панельных зданий Пресс в большом городе
Пресс в большом городе Презентация Bosch
Презентация Bosch Одяг, їжа і побут українського населення у періоді XVIII, XIX та на початку XX століття
Одяг, їжа і побут українського населення у періоді XVIII, XIX та на початку XX століття Закріплення знань про букви Й, й, звук /й/
Закріплення знань про букви Й, й, звук /й/ Родительское собрание 6 класс Классный рук-ль Иванова Н.А.
Родительское собрание 6 класс Классный рук-ль Иванова Н.А. Размещение бытового газоборудования в квартирах
Размещение бытового газоборудования в квартирах Радиационная безопасность: концепция, нормы и правила, контроль
Радиационная безопасность: концепция, нормы и правила, контроль Презентация на тему "Тестирование как система оценки и контроля знаний, умений обучающихся" - скачать презентации по Педагоги
Презентация на тему "Тестирование как система оценки и контроля знаний, умений обучающихся" - скачать презентации по Педагоги Курсы по выбору – основа предпрофильной подготовки школьников
Курсы по выбору – основа предпрофильной подготовки школьников