- Теория машин и механизмов

Содержание
- 2. Теория механизмов и машин (ТММ) излагает научные основы создания новых машин и механизмов, методы их построения
- 3. Анализ заключается в определении свойств существующих механизмов и машин. Это прямая задача механики машин. Синтез механизмов
- 4. Основные задачи дисциплины: Формирование знаний о видах, строении и свойствах основных типов механизмов, применяемых в машиностроении.
- 5. Машина есть устройство, создаваемое человеком для использования законов природы с целью облегчения физического и умственного труда,
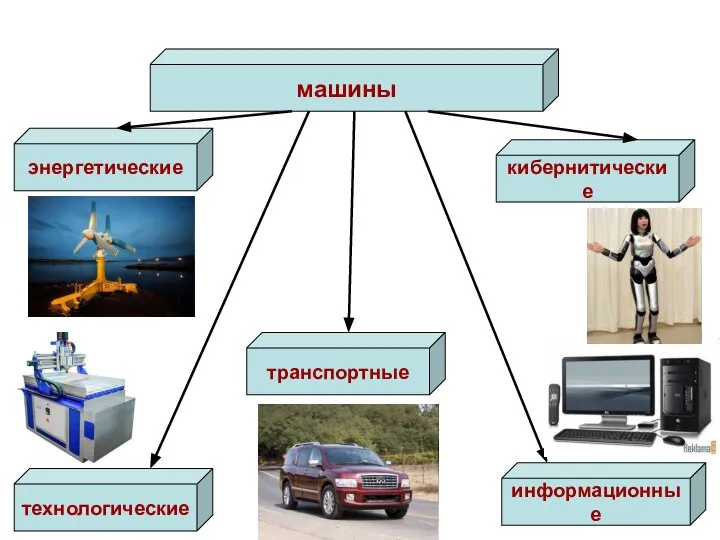
- 6. машины энергетические кибернитические технологические информационные транспортные
- 7. I. Энергетические. В них происходит преобразование энергии из одного вида в другой (например, электрогенераторы, электродвигатели, двигатели
- 8. Машина, как правило, состоит из одного или нескольких механизмов. Механизмом называется искусственно созданная система тел, предназначенная
- 9. Основные допущения, используемые при моделировании механических систем: Идеализированные модели (общепринятые допущения): все составные части механической системы
- 10. механизмы электрические механические гидравлические пневматические
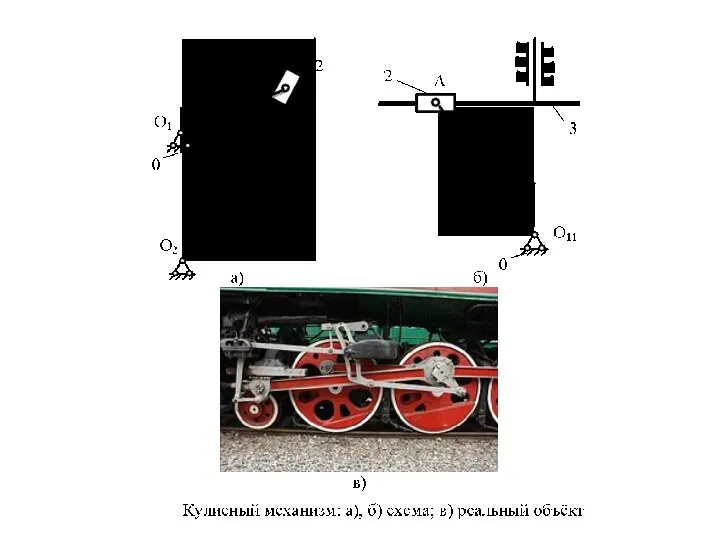
- 11. Твердые тела в составе механизма – звенья. Подвижное соединение двух звеньев, допускающее их относительное движение, называется
- 16. Классификация плоских кинематических пар Классификация по числу условий связей
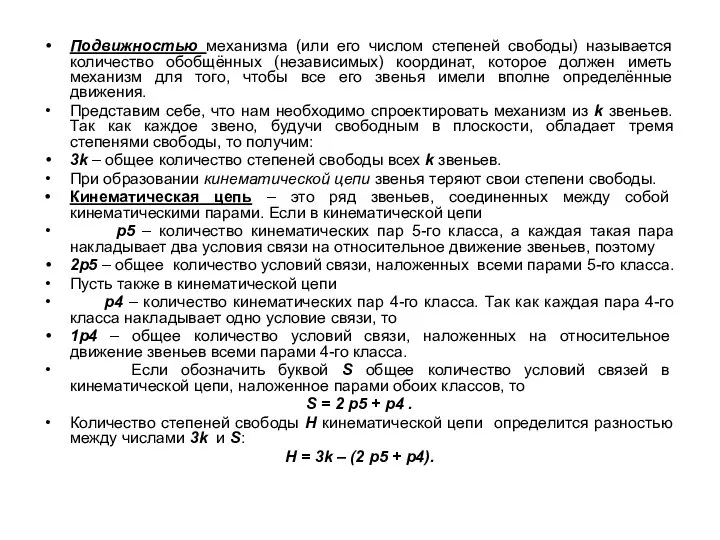
- 17. на свободное твёрдое тело не наложено ни одной связи. Если обозначить число степеней свободы буквой H,
- 18. Класс кинематической пары определяется количеством наложенных связей: S = 5 такая кинематическая пара в соответствии с
- 19. S = 4 такая кинематическая пара в соответствии с числом S является парой 4-го класса
- 20. S = 3 такая кинематическая пара в соответствии с числом S является парой 3-го класса
- 21. Классификация по характеру касания элементов
- 22. Элемент кинематической пары – это совокупность точек, линий или поверхностей, которыми данное звено входит в касание
- 23. низшая высшая
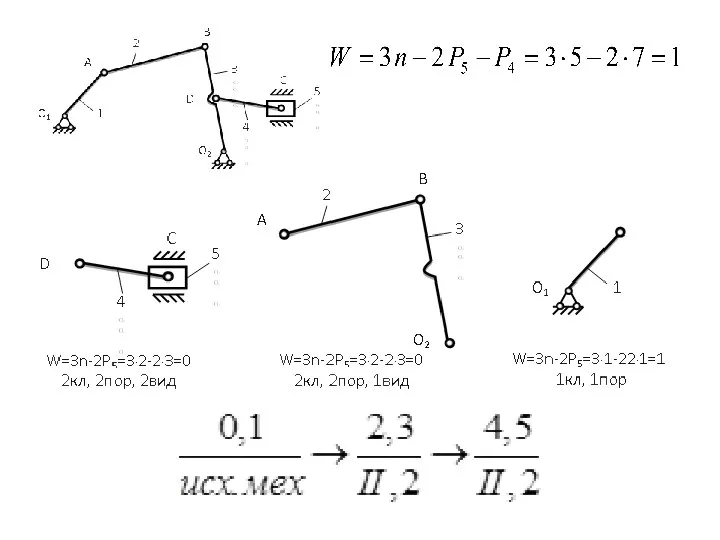
- 24. Расчет подвижности плоского механизма
- 25. Подвижностью механизма (или его числом степеней свободы) называется количество обобщённых (независимых) координат, которое должен иметь механизм
- 26. Механизм – это кинематическая цепь с одним неподвижным звеном, допускающая целесообразные однозначно определенные движения. Степень подвижности
- 27. Структурная классификация механизмов Принцип структурного образования механизмов по Л.В. Ассуру
- 28. Кинематическая цепь, которая после присоединения её всеми свободными элементами кинематических пар к стойке получает подвижность, равную
- 29. Группы Ассура делятся на классы и порядки. Класс группы определяется классом наиболее сложного замкнутого контура в
- 30. Порядок групп Ассура определяется количеством свободных элементов кинематических пар, которыми группы Ассура присоединяются к другим звеньям.
- 31. Классификация механизмов. Формула строения
- 32. Класс механизма – это класс группы Ассура наиболее высокого класса. При одном ведущем звене При двух
- 34. Кинематика рычажных механизмов
- 35. Задачи исследования 1)Определение положений звеньев механизма и определение траекторий отдельных его точек. 2)Определение линейных скоростей точек
- 36. Аналитический метод Метод заключается в определении математических выражений, описывающих функциональную связь между входными и выходными параметрами
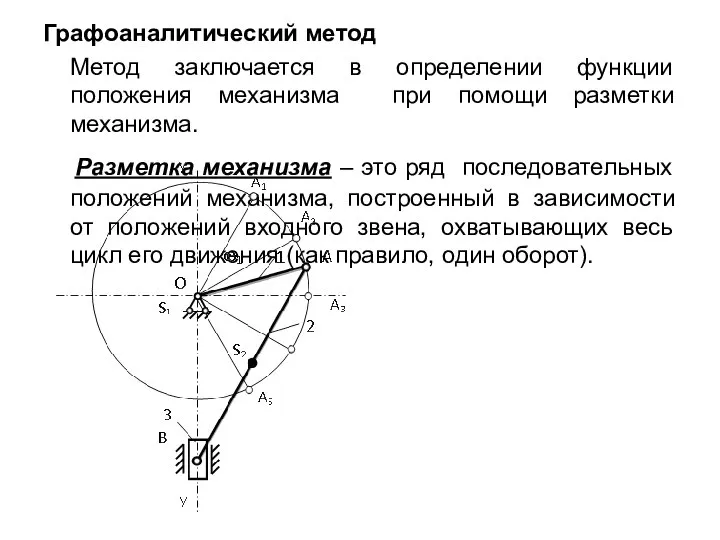
- 37. Графоаналитический метод Метод заключается в определении функции положения механизма при помощи разметки механизма. Разметка механизма –
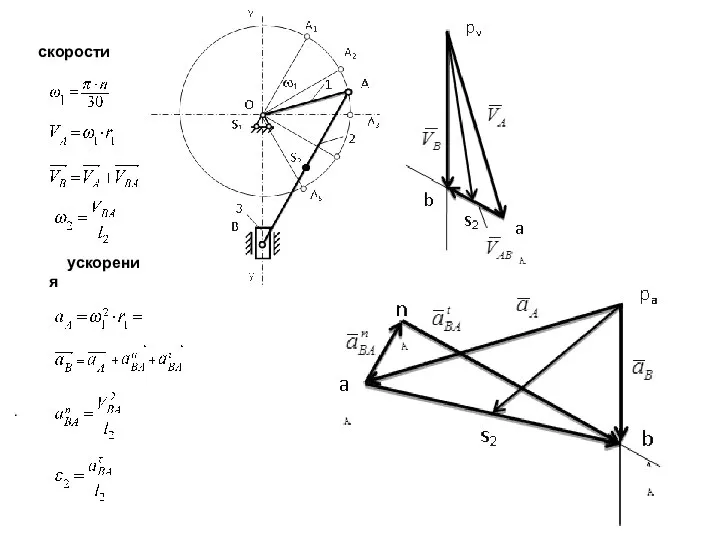
- 38. Определение скоростей и ускорений Планом скоростей (ускорений) механизма называется пучок векторов, выходящих из одной точки (полюса
- 39. скорости ускорения .
- 40. Метод кинематических диаграмм (метод графического дифференцирования)
- 41. Кинетостатика механизмов
- 42. В этом разделе изучаются силы, действующие на звенья механизмов. Из-за ограниченности объёма данной работы здесь рассматриваются
- 43. Расчёт сил инерции Поступательное движение звена . Вращательное движение звена
- 44. Общие положения силового расчёта Принцип Даламбера: если к системе сил, действующих на подвижную систему, добавить силы
- 45. Силовой расчёт группы Ассура 2-3 Р3+Ри3+G3+G2+Ри2+R12t+R12п+R03=0
- 46. Силовой расчёт кривошипа (ведущего звена) Р21+Ри1+G1+R01=0 М21 = R21⋅h21 = - Мур
- 48. Скачать презентацию
Теория механизмов и машин (ТММ) излагает научные основы создания новых машин
Теория механизмов и машин (ТММ) излагает научные основы создания новых машин
Анализ заключается в определении свойств существующих механизмов и машин. Это прямая
Анализ заключается в определении свойств существующих механизмов и машин. Это прямая
Основные задачи дисциплины:
Формирование знаний о видах, строении и свойствах основных типов
Основные задачи дисциплины:
Формирование знаний о видах, строении и свойствах основных типов

Машина есть устройство, создаваемое человеком для использования законов природы с целью
Машина есть устройство, создаваемое человеком для использования законов природы с целью
машины
энергетические
кибернитические
технологические
информационные
транспортные
машины
энергетические
кибернитические
технологические
информационные
транспортные
I. Энергетические. В них происходит преобразование энергии из одного вида в
I. Энергетические. В них происходит преобразование энергии из одного вида в
Машина, как правило, состоит из одного или нескольких механизмов.
Механизмом называется искусственно
Машина, как правило, состоит из одного или нескольких механизмов.
Механизмом называется искусственно
Основные допущения, используемые при моделировании механических систем:
Идеализированные модели (общепринятые допущения): все
Основные допущения, используемые при моделировании механических систем:
Идеализированные модели (общепринятые допущения): все
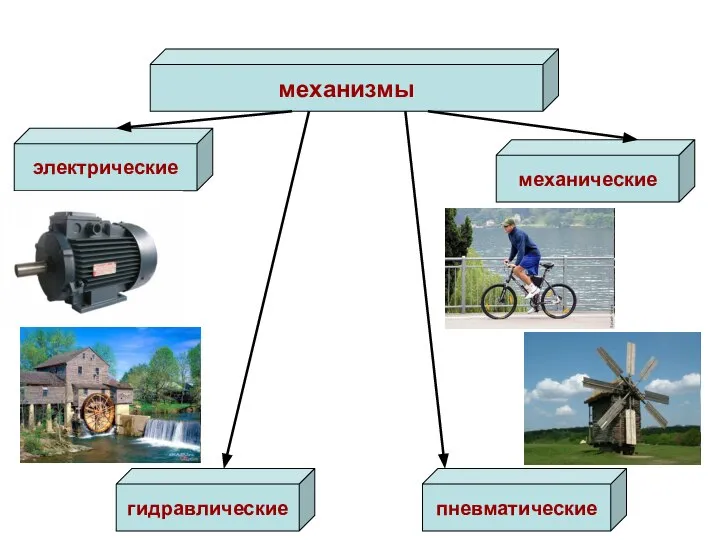
механизмы
электрические
механические
гидравлические
пневматические
механизмы
электрические
механические
гидравлические
пневматические
Твердые тела в составе механизма – звенья.
Подвижное соединение двух звеньев,
Твердые тела в составе механизма – звенья.
Подвижное соединение двух звеньев,
Классификация плоских кинематических пар
Классификация по числу условий связей
Классификация плоских кинематических пар
Классификация по числу условий связей
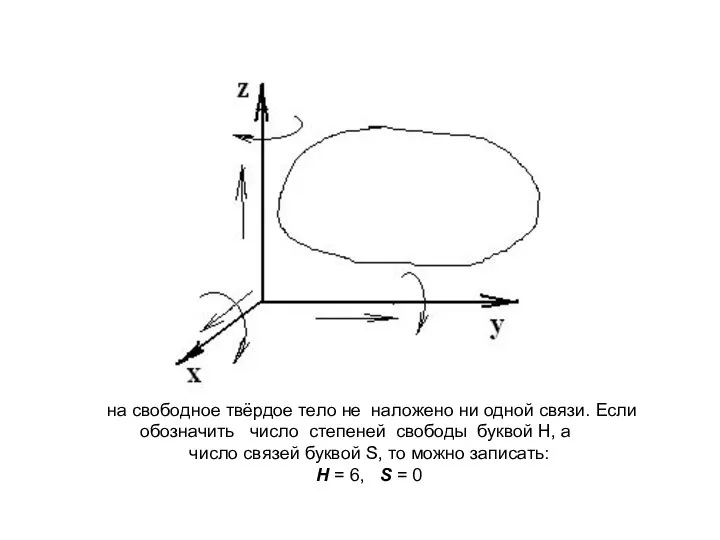
на свободное твёрдое тело не наложено ни одной связи. Если обозначить
на свободное твёрдое тело не наложено ни одной связи. Если обозначить
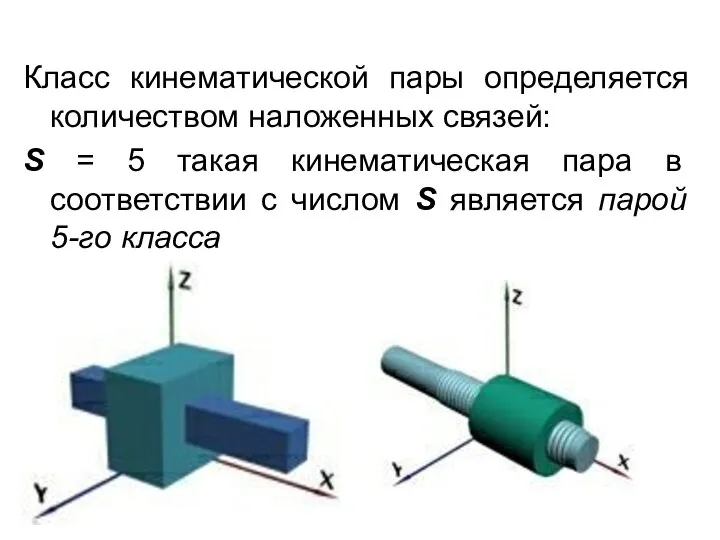
Класс кинематической пары определяется количеством наложенных связей:
S = 5 такая кинематическая
Класс кинематической пары определяется количеством наложенных связей:
S = 5 такая кинематическая
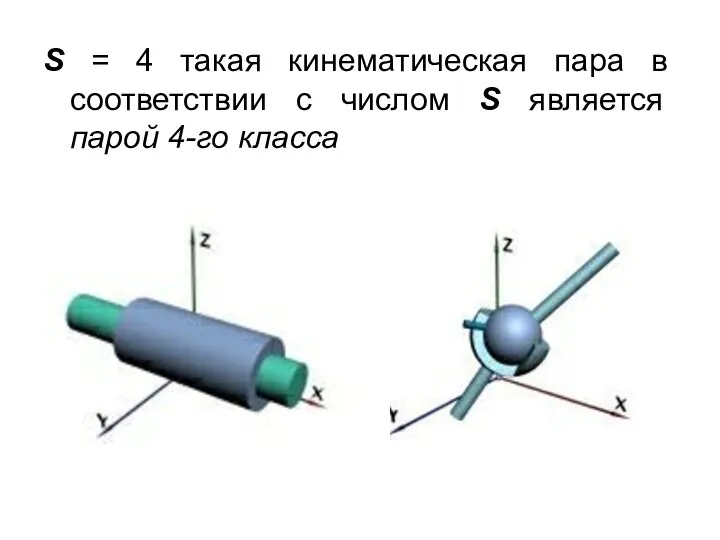
S = 4 такая кинематическая пара в соответствии с числом S
S = 4 такая кинематическая пара в соответствии с числом S

S = 3 такая кинематическая пара в соответствии с числом S
S = 3 такая кинематическая пара в соответствии с числом S
Классификация по характеру касания элементов
Классификация по характеру касания элементов
Элемент кинематической пары – это совокупность точек, линий или поверхностей, которыми
Элемент кинематической пары – это совокупность точек, линий или поверхностей, которыми
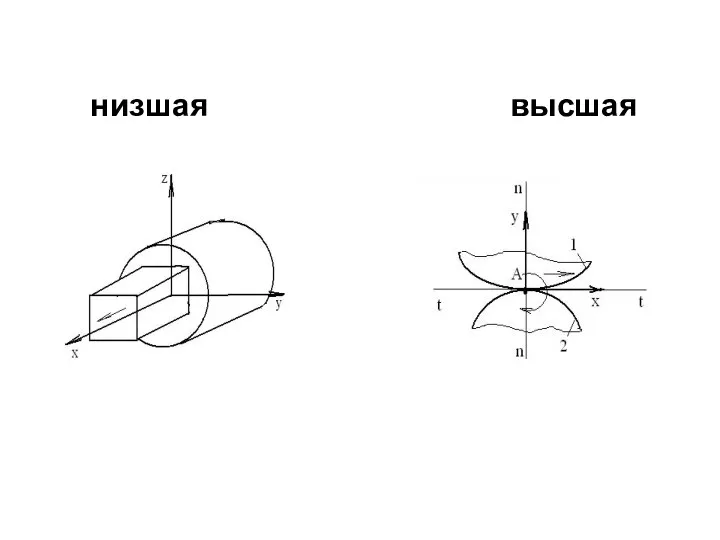
низшая высшая
низшая высшая
Расчет подвижности плоского механизма
Расчет подвижности плоского механизма
Подвижностью механизма (или его числом степеней свободы) называется количество обобщённых (независимых)
Подвижностью механизма (или его числом степеней свободы) называется количество обобщённых (независимых)
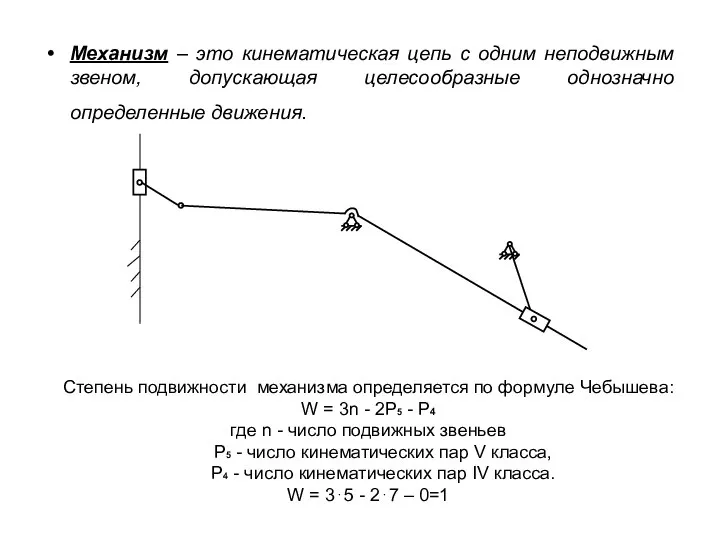
Механизм – это кинематическая цепь с одним неподвижным звеном, допускающая целесообразные
Механизм – это кинематическая цепь с одним неподвижным звеном, допускающая целесообразные
Структурная классификация механизмов
Принцип структурного образования механизмов по Л.В. Ассуру
Структурная классификация механизмов
Принцип структурного образования механизмов по Л.В. Ассуру
Кинематическая цепь, которая после присоединения её всеми свободными элементами кинематических пар
Кинематическая цепь, которая после присоединения её всеми свободными элементами кинематических пар
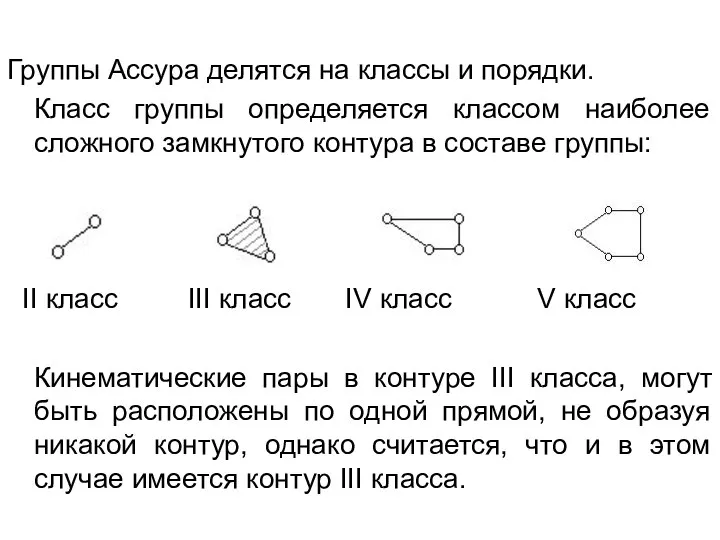
Группы Ассура делятся на классы и порядки.
Класс группы определяется классом наиболее
Группы Ассура делятся на классы и порядки.
Класс группы определяется классом наиболее
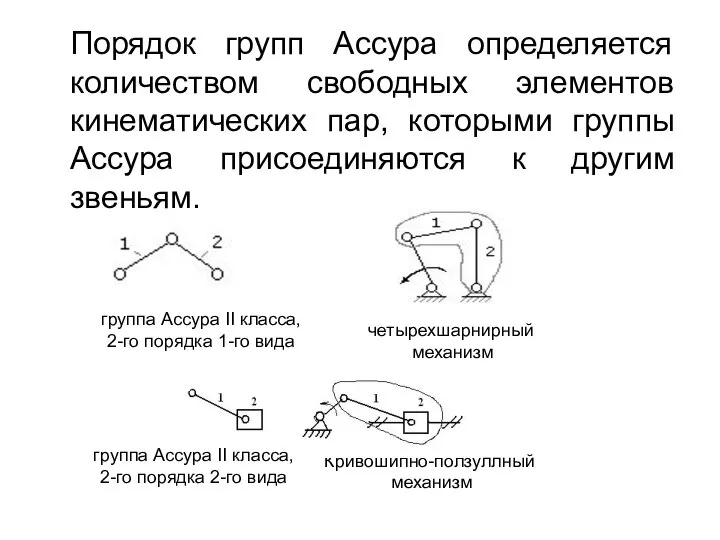
Порядок групп Ассура определяется количеством свободных элементов кинематических пар, которыми группы
Порядок групп Ассура определяется количеством свободных элементов кинематических пар, которыми группы
Классификация механизмов. Формула строения
Классификация механизмов. Формула строения
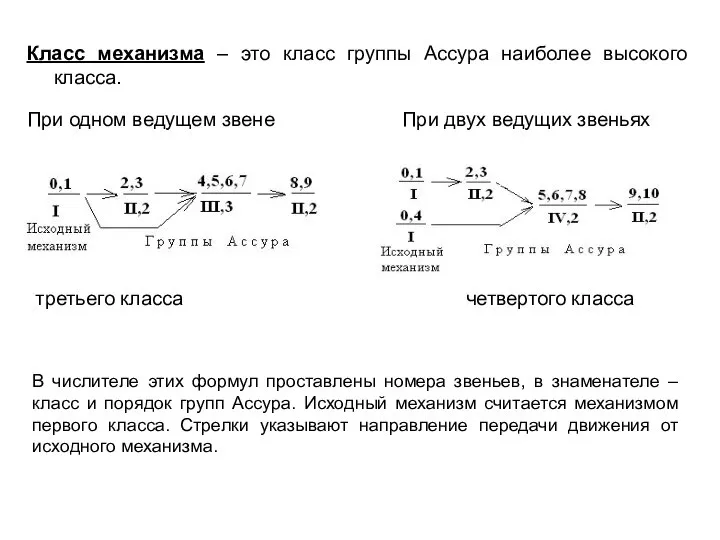
Класс механизма – это класс группы Ассура наиболее высокого класса.
При одном
Класс механизма – это класс группы Ассура наиболее высокого класса.
При одном
Кинематика рычажных механизмов
Кинематика рычажных механизмов
Задачи исследования
1)Определение положений звеньев механизма и определение траекторий отдельных его точек.
2)Определение
Задачи исследования
1)Определение положений звеньев механизма и определение траекторий отдельных его точек.
2)Определение
Аналитический метод
Метод заключается в определении математических выражений, описывающих функциональную связь
Аналитический метод
Метод заключается в определении математических выражений, описывающих функциональную связь
Графоаналитический метод
Метод заключается в определении функции положения механизма при помощи
Графоаналитический метод
Метод заключается в определении функции положения механизма при помощи
Определение скоростей и ускорений
Планом скоростей (ускорений) механизма называется пучок векторов, выходящих
Определение скоростей и ускорений
Планом скоростей (ускорений) механизма называется пучок векторов, выходящих
скорости
ускорения
.
скорости
ускорения
.

Метод кинематических диаграмм
(метод графического дифференцирования)
Метод кинематических диаграмм
(метод графического дифференцирования)
Кинетостатика механизмов
Кинетостатика механизмов
В этом разделе изучаются силы, действующие на звенья механизмов. Из-за ограниченности
В этом разделе изучаются силы, действующие на звенья механизмов. Из-за ограниченности
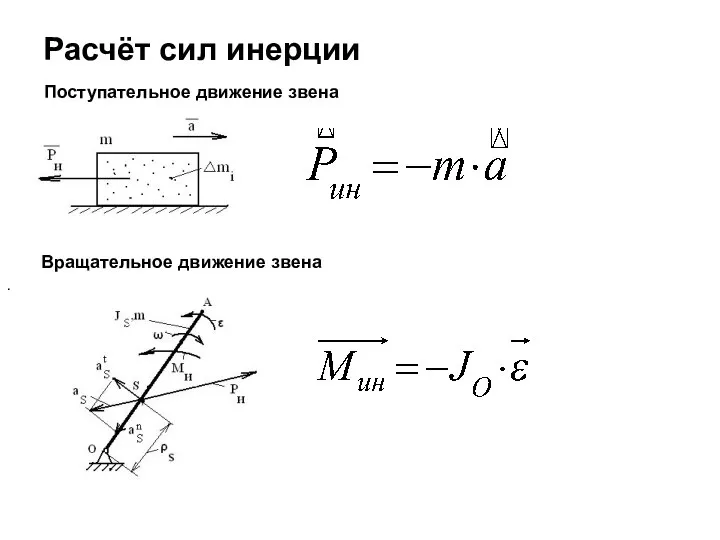
Расчёт сил инерции
Поступательное движение звена
.
Вращательное движение звена
Расчёт сил инерции
Поступательное движение звена
.
Вращательное движение звена
Общие положения силового расчёта
Принцип Даламбера: если к системе сил, действующих на
Общие положения силового расчёта
Принцип Даламбера: если к системе сил, действующих на
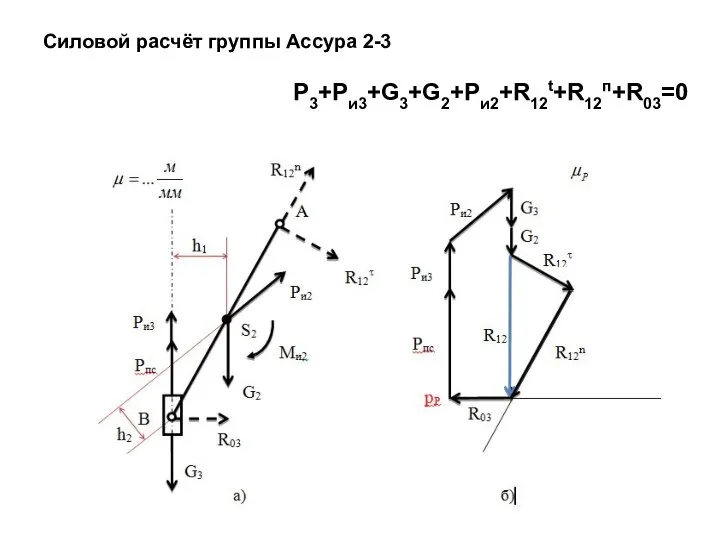
Силовой расчёт группы Ассура 2-3
Р3+Ри3+G3+G2+Ри2+R12t+R12п+R03=0
Силовой расчёт группы Ассура 2-3
Р3+Ри3+G3+G2+Ри2+R12t+R12п+R03=0
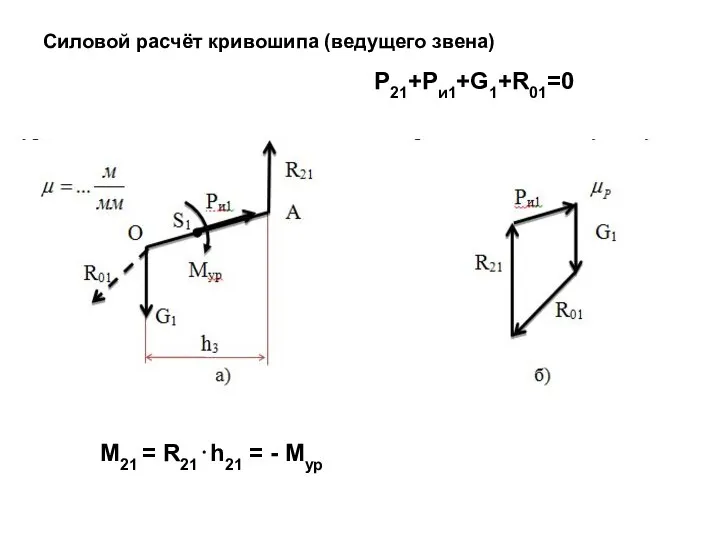
Силовой расчёт кривошипа (ведущего звена)
Р21+Ри1+G1+R01=0
М21 = R21⋅h21 = - Мур
Силовой расчёт кривошипа (ведущего звена)
Р21+Ри1+G1+R01=0
М21 = R21⋅h21 = - Мур
 Чему мы научились за год? Урок-праздник. Автор: Любаева Любовь Владимировна, учитель начальных классов, МОУ СОШ № 3
Чему мы научились за год? Урок-праздник. Автор: Любаева Любовь Владимировна, учитель начальных классов, МОУ СОШ № 3 Список руководящих документов
Список руководящих документов  Политическая партия «Справедливая Россия»
Политическая партия «Справедливая Россия»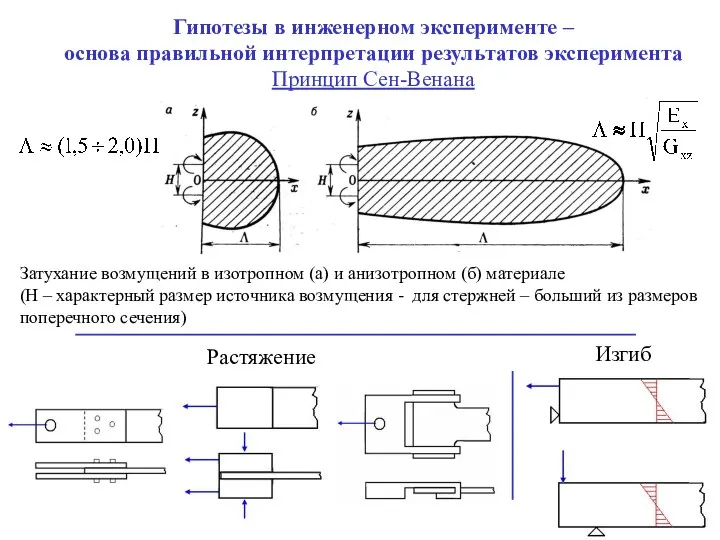 Гипотезы в инженерном эксперименте – основа правильной интерпретации результатов эксперимента. Принцип Сен-Венана
Гипотезы в инженерном эксперименте – основа правильной интерпретации результатов эксперимента. Принцип Сен-Венана Обмен сообщениями в MPI
Обмен сообщениями в MPI Здание в Касолики, Лимассол, Кипр
Здание в Касолики, Лимассол, Кипр Опцион (оption) - контракт, заключенный между двумя лицами, в соответствии с которым одно лицо предоставляет другому лицу право купить
Опцион (оption) - контракт, заключенный между двумя лицами, в соответствии с которым одно лицо предоставляет другому лицу право купить Разработка игры “Sokoban”
Разработка игры “Sokoban” Рак щитовидной железы
Рак щитовидной железы Футбольный Zamess. Проект
Футбольный Zamess. Проект Презентация Страхование школьников
Презентация Страхование школьников Автоматизированное рабочее место. Автоматизированный электропривод
Автоматизированное рабочее место. Автоматизированный электропривод Полисахариды
Полисахариды Основы расчета по предельным состояниям. Расчет элементов конструкций цельного сечения
Основы расчета по предельным состояниям. Расчет элементов конструкций цельного сечения УРАВНЕНИЯ ПРЕЗЕНТАЦИЯ ПО МАТЕМАТИКЕ ДЛЯ УЧАЩИХСЯ 6 КЛАССА ПО УЧЕБНИКУ «МАТЕМАТИКА 6» НИКОЛЬСКОГО С.М. ПОДГОТОВИЛА: учитель ма
УРАВНЕНИЯ ПРЕЗЕНТАЦИЯ ПО МАТЕМАТИКЕ ДЛЯ УЧАЩИХСЯ 6 КЛАССА ПО УЧЕБНИКУ «МАТЕМАТИКА 6» НИКОЛЬСКОГО С.М. ПОДГОТОВИЛА: учитель ма Я – воспитатель и этим горжусь! Трофимова Марина Александровна – воспитатель. МУНИЦИПАЛЬНОЕ АВТОНОМНОЕ ДОШКОЛЬНОЕ ОБРАЗОВАТЕЛ
Я – воспитатель и этим горжусь! Трофимова Марина Александровна – воспитатель. МУНИЦИПАЛЬНОЕ АВТОНОМНОЕ ДОШКОЛЬНОЕ ОБРАЗОВАТЕЛ Презентация Производство и издержки
Презентация Производство и издержки Предмет и задачи судебной экспертизы
Предмет и задачи судебной экспертизы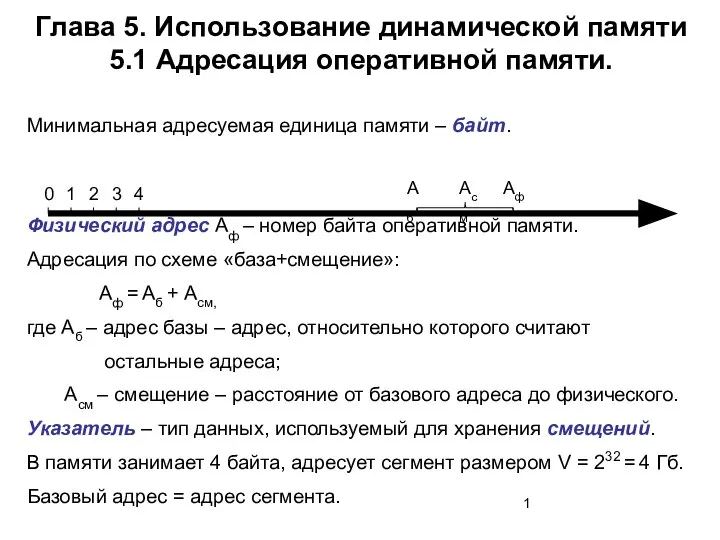 Использование динамической памяти Адресация оперативной памяти
Использование динамической памяти Адресация оперативной памяти Познание духовной природы мужчины и женщины - путь к гармонии
Познание духовной природы мужчины и женщины - путь к гармонии Символы в китайском искусстве. Китайский гороскоп.
Символы в китайском искусстве. Китайский гороскоп. Профилактика суицидального поведения подростков
Профилактика суицидального поведения подростков  Правовой режим интеллектуальной собственности
Правовой режим интеллектуальной собственности  Гальванизация
Гальванизация 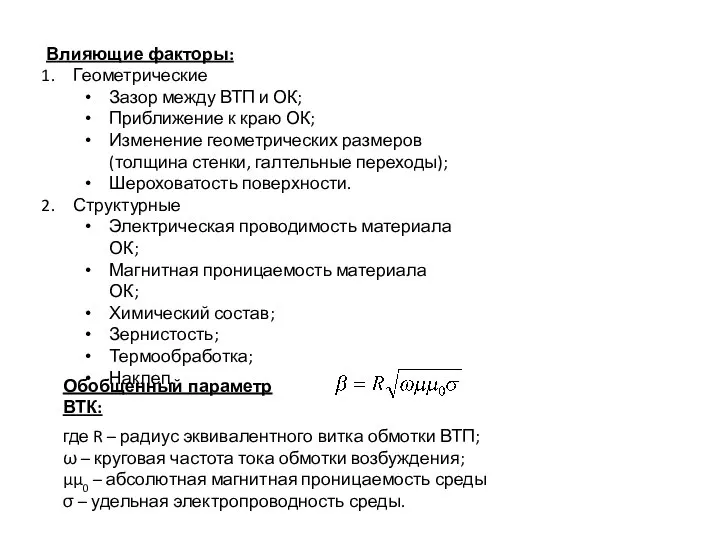 Контроль цилиндрических изделий наружными проходными ВТП с однородным магнитным полем
Контроль цилиндрических изделий наружными проходными ВТП с однородным магнитным полем Понятие цикла
Понятие цикла ДИДАКТИКА СОВРЕМЕННОГО УРОКА
ДИДАКТИКА СОВРЕМЕННОГО УРОКА Типовые последовательностные автоматы
Типовые последовательностные автоматы