- Введение. История развития автоматики. Лекция 1

Содержание
- 2. Автоматизация – это идеология и практика использования в промышленном производстве автоматических управляющих устройств, заключается в замене
- 3. Техническая кибернетика включает в себя 3 раздела: 1) Теория информации, связанная с получением, хранением и переработкой
- 4. Управление – процесс организации такого целенаправленного воздействия на объект, при котором объект переходит в требуемое состояние
- 5. Технический объект (станок, двигатель, поточная линия и т.д.), нуждающийся для успешного взаимодействия с другими объектами или
- 6. 1.2 Краткая история развития автоматики Развитие мировой техники шло в трех направлениях: 1) Создание машин двигателей
- 7. 1.3 Основные понятия и задачи автоматизации Системы автоматической сигнализации (САС) – системы предназначеные для извещения обслуживающего
- 8. Системы автоматического пуска и останова – системы, которые обеспечивают включение, переключение и отключение различных приводов и
- 9. Целями управления технологическими процессами и агрегатами могут быть: поддержание постоянного значения некоторой физической величины с заданной
- 10. При наиболее простых целях управления процесс управления называют регулированием. Объекты управления - объектами регулирования (ОР), управляющие
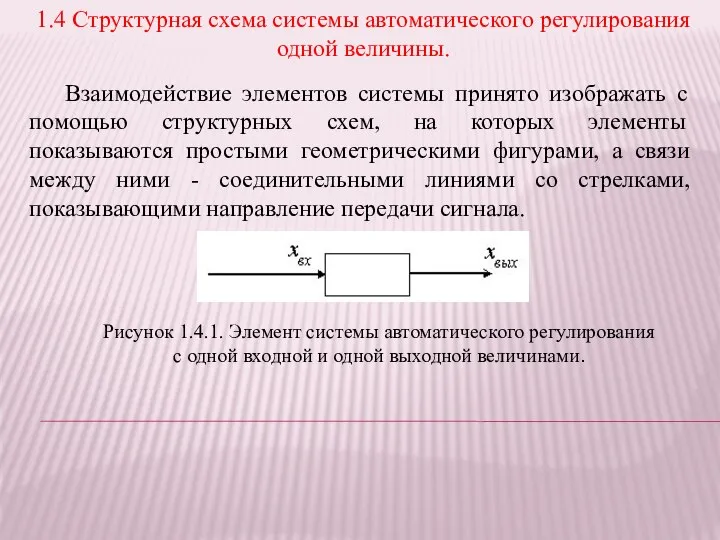
- 11. 1.4 Структурная схема системы автоматического регулирования одной величины. Взаимодействие элементов системы принято изображать с помощью структурных
- 12. Рисунок 1.4.2. Элемент системы автоматического регулирования с несколькими входными и выходными величинами. В любом элементе системы
- 13. В более сложных случаях выходная величина элемента хвых может оказывать обратное воздействие на его вход. При
- 14. Структурная схема регулятора У – регулирующее воздействие; Х - регулируемая величина; Х0–заданное значение регулируемой величины; ε
- 15. Если соединить объект и регулятор на структурной схеме в соответствии с принятыми обозначениями величин, то получится
- 17. Скачать презентацию
Автоматизация – это идеология и практика использования в промышленном производстве автоматических
Автоматизация – это идеология и практика использования в промышленном производстве автоматических
Техническая кибернетика включает в себя 3 раздела:
1) Теория информации, связанная с получением,
Техническая кибернетика включает в себя 3 раздела:
1) Теория информации, связанная с получением,
Управление – процесс организации такого целенаправленного воздействия на объект, при котором
Управление – процесс организации такого целенаправленного воздействия на объект, при котором
Технический объект (станок, двигатель, поточная линия и т.д.), нуждающийся для успешного
Технический объект (станок, двигатель, поточная линия и т.д.), нуждающийся для успешного
1.2 Краткая история развития автоматики
Развитие мировой техники шло в трех направлениях:
1) Создание
1.2 Краткая история развития автоматики
Развитие мировой техники шло в трех направлениях:
1) Создание
1.3 Основные понятия и задачи автоматизации
Системы автоматической сигнализации (САС) – системы
1.3 Основные понятия и задачи автоматизации
Системы автоматической сигнализации (САС) – системы
Системы автоматического пуска и останова – системы, которые обеспечивают включение, переключение
Системы автоматического пуска и останова – системы, которые обеспечивают включение, переключение
Целями управления технологическими процессами и агрегатами могут быть:
поддержание постоянного значения некоторой
Целями управления технологическими процессами и агрегатами могут быть:
поддержание постоянного значения некоторой
При наиболее простых целях управления процесс управления называют регулированием. Объекты управления
При наиболее простых целях управления процесс управления называют регулированием. Объекты управления
1.4 Структурная схема системы автоматического регулирования
одной величины.
Взаимодействие элементов системы принято
1.4 Структурная схема системы автоматического регулирования
одной величины.
Взаимодействие элементов системы принято
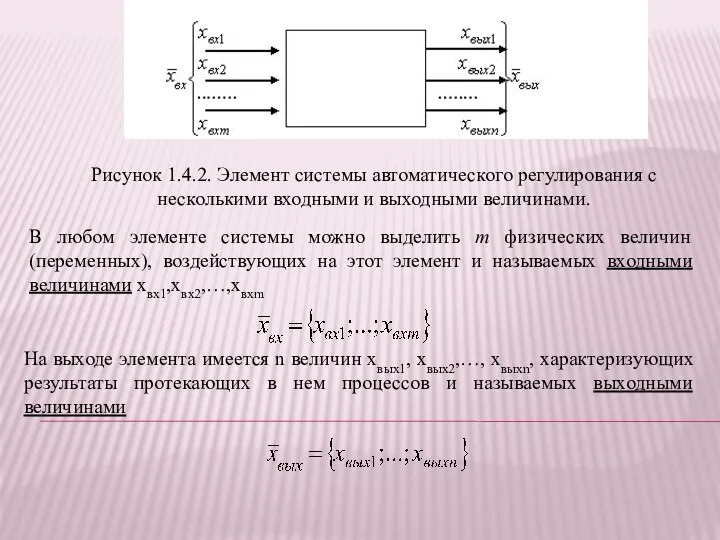
Рисунок 1.4.2. Элемент системы автоматического регулирования с несколькими входными и выходными
Рисунок 1.4.2. Элемент системы автоматического регулирования с несколькими входными и выходными
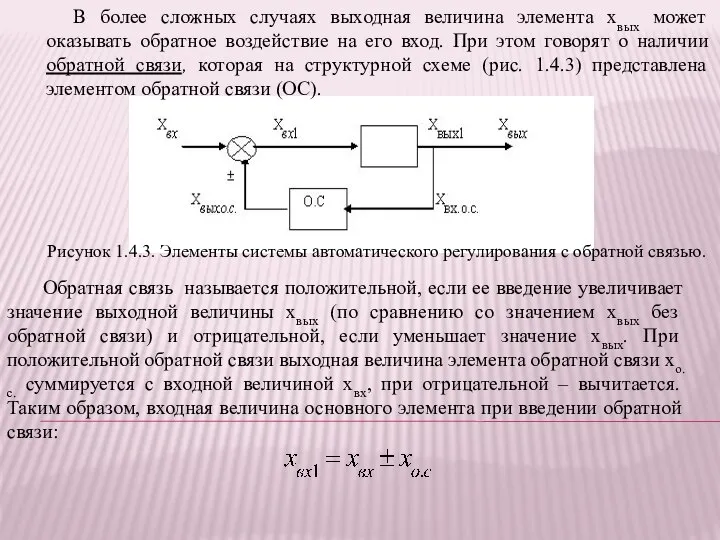
В более сложных случаях выходная величина элемента хвых может оказывать обратное
В более сложных случаях выходная величина элемента хвых может оказывать обратное
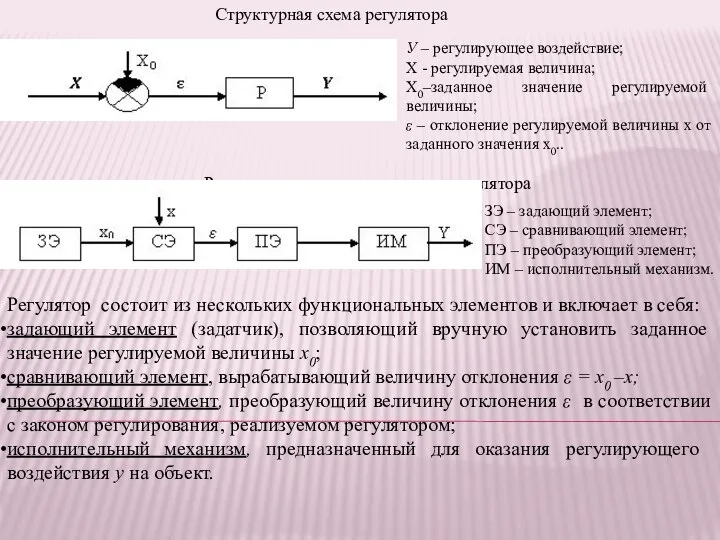
Структурная схема регулятора
У – регулирующее воздействие;
Х - регулируемая величина;
Х0–заданное
Структурная схема регулятора
У – регулирующее воздействие;
Х - регулируемая величина;
Х0–заданное
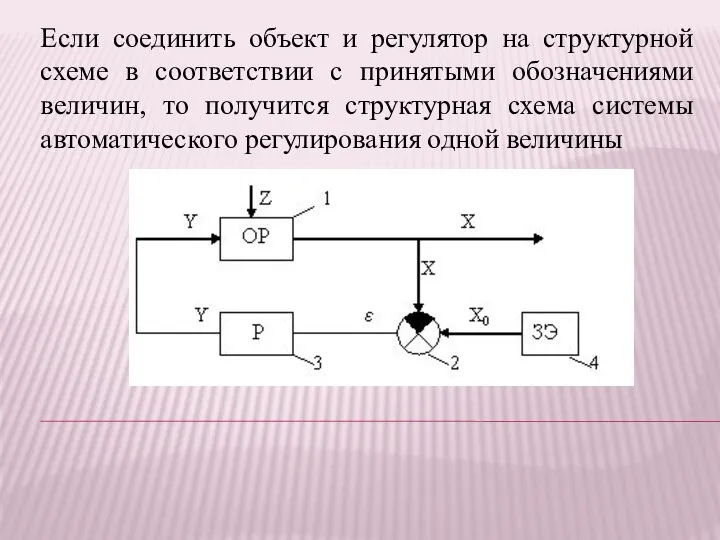
Если соединить объект и регулятор на структурной схеме в соответствии с
Если соединить объект и регулятор на структурной схеме в соответствии с
 Стратегическая конкурентоспособность наукоемких предприятий
Стратегическая конкурентоспособность наукоемких предприятий ВВЕДЕНИЕ В ГЕОМЕХАНИКУ МЕСТОРОЖДЕНИЙ УГЛЕВОДОРОДОВ
ВВЕДЕНИЕ В ГЕОМЕХАНИКУ МЕСТОРОЖДЕНИЙ УГЛЕВОДОРОДОВ  Культура поведения и общения - презентация для начальной школы_
Культура поведения и общения - презентация для начальной школы_ Стропильная система
Стропильная система Понятие права. Право в системе социальных норм
Понятие права. Право в системе социальных норм Профилактика кори и краснухи в период верификации их элиминации в городе Москве ( 2013-2015гг.)"
Профилактика кори и краснухи в период верификации их элиминации в городе Москве ( 2013-2015гг.)"  Презентация на тему "Развивающее обучение: что это такое?" - скачать презентации по Педагогике
Презентация на тему "Развивающее обучение: что это такое?" - скачать презентации по Педагогике Современные тенденции в физической рекреации для мужчин зрелого возраста
Современные тенденции в физической рекреации для мужчин зрелого возраста Задачи о распределении ресурсов
Задачи о распределении ресурсов Продовольственная безопасность России. Горовых А.Е (Т-093)
Продовольственная безопасность России. Горовых А.Е (Т-093) lecture_1-2(1)
lecture_1-2(1) Электронно-оптические преобразователи
Электронно-оптические преобразователи кафедра микробиологии ГОУ ВПО ИГМУ Подготовила : студентка 3 курса педиатрического факультета Замагина Е.Г. Проверила : Понама
кафедра микробиологии ГОУ ВПО ИГМУ Подготовила : студентка 3 курса педиатрического факультета Замагина Е.Г. Проверила : Понама Физическое развитие детей и подростков как показатель здоровья
Физическое развитие детей и подростков как показатель здоровья no
no Искусство Древнего Китая
Искусство Древнего Китая Возможности использования интерактивной доски на уроках русского языка и литературы
Возможности использования интерактивной доски на уроках русского языка и литературы  Презентация "1CУправление производственным предприятием" - скачать презентации по Экономике
Презентация "1CУправление производственным предприятием" - скачать презентации по Экономике Понятие и факторы, показатели экономического роста. Подготовили: Синкевич Юлия Т-101 Филатова Дарья Т-101
Понятие и факторы, показатели экономического роста. Подготовили: Синкевич Юлия Т-101 Филатова Дарья Т-101 Історія грошей в Україні
Історія грошей в Україні 03_-_dr_Grecia
03_-_dr_Grecia Формирование читательской компетентности младшего школьника. Завязкина Лидия Дмитриевн
Формирование читательской компетентности младшего школьника. Завязкина Лидия Дмитриевн Кантор Георг
Кантор Георг Концептуальная стадия проекта
Концептуальная стадия проекта Составление комбинированных алгоритмов для графических исполнителей
Составление комбинированных алгоритмов для графических исполнителей Two-Level Logic Minimization Algorithms. Lecture 3
Two-Level Logic Minimization Algorithms. Lecture 3 Детская сына
Детская сына Храм Воскресения Христова на Семёновском кладбище
Храм Воскресения Христова на Семёновском кладбище