- Биомеханика двигательной деятельности

Содержание
- 2. Различают следующие формы движения: а) простые формы движения материи – механическую, физическую и химическую (проявляются как
- 3. Двигательные действия осуществляются при помощи произвольных активных движений, вызванных управляемой работой мышц. Человек произвольно, по собственной
- 4. Двигательные действия человека, которые изучаются в биомеханике, включают в себя механическое движение. Именно оно представляет собой
- 5. биомеханика составлено из двух греческих слов: Bios - жизнь и mexane - механика - это раздел
- 6. Предмет и объект биомеханики Биомеханика двигательной деятельности изучает движения человека в процессе физических упражнений и его
- 7. общая задача изучения движений человека в биомеханике двигательных действий оценка эффективности применения сил для более совершенного
- 8. частные задачи биомеханики
- 9. Методы исследования биомеханики Методы биомеханики в наиболее общем виде имеют в своей основе системный анализ и
- 10. системный анализ действий. системный анализ действий это разложение единого целого на составные части При системном анализе
- 11. системный синтез действий системный синтез действий это способ выявления взаимосвязи частей в системе, закономерностей их взаимодействия
- 12. Биомеханика делится на три части: Статика – раздел биомеханики, который изучает законы для действия сил при
- 13. Методы регистрации характеристик двигательных действий Методы непосредственного измерения Методы использования злектротехнических средств ( миографы, кардиографы, тензометрические
- 14. Опорно-двигательный аппарат Твердую основу двигательного аппарата составляет его костный осевой скелет. Все кости соединяются в скелет
- 15. Механические свойства мышцы Упругость проявляется в возникновении напряжения в мышце при ее деформации под действием нагрузки
- 16. Функция скелетных мышц состоит в том, чтобы своим напряжением создать силы тяги, приложенные к противоположным местам
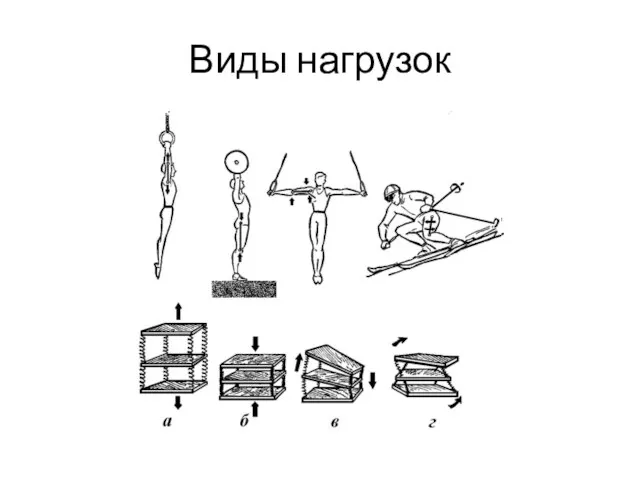
- 17. Силы, приложенные к телу и вызывающие его деформации, называются нагрузками. Различают: нагрузки на растяжение, нагрузки на
- 18. Виды нагрузок
- 19. С позиций теории механизмов и машин части тела человека, имеющие подвижные соединения, принято рассматривать как звенья,
- 20. степени свободы движения Движение свободного тела возможно в трех основных направлениях – вдоль осей координат, а
- 21. Степени свободы
- 22. Кинематическая пара – это подвижное соединение двух звеньев. Кинематические пары бывают: а) поступательные – одно звено
- 23. Кинематическая цепь – это последовательное или разветвленное соединение ряда кинематических пар. Цепь в которой конечное звено
- 24. Движения в кинематических цепях Движения в незамкнутых цепях характеризуются относительной независимостью звеньев и большой свободой движения
- 25. Рис. 4.3. Кинематические цепи тела: а – виды цепей: bam – незамкнутые, ABCDE – замкнутая на
- 26. Звенья тела, подвижно соединенные в суставах под действием приложенных сил, – могут либо сохранять свое положение,
- 27. Рычаг – это любое твердое тело, имеющее точку опоры (ось вращения) и способное поворачиваться вокруг нее.
- 29. Примером рычага первого рода
- 30. Виды рычагов
- 32. рычаги третьего рода.
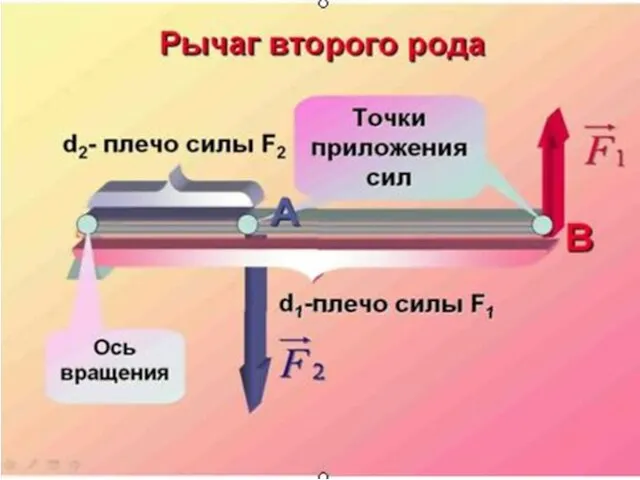
- 33. Рычажное устройство двигательного аппарата дает человеку возможность выполнять дальние броски, сильные удары и т. п. Но
- 34. Положение тела человека определяется: местоположением, ориентацией относительно системы отсчета, позой (взаимным расположением звеньев тела), отношением к
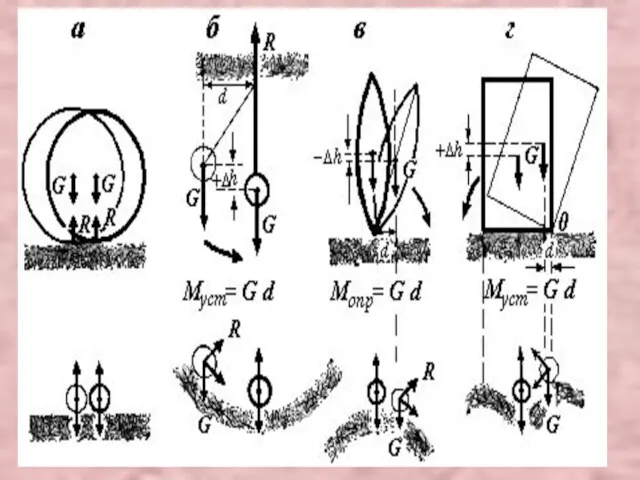
- 37. Виды равновесия твердого тела а) безразличное равновесие – действие силы тяжести не изменяется; б) устойчивое –
- 40. Сохранение положения тела спортсмена достигается при помощи следующих движений: Компенсаторные движения направлены на предупреждение выхода ЦМ
- 41. Управление сохранением положения тела движениями
- 42. Задание к контрольной работе Цель: научиться определять некоторые биомеханические характеристики. 1. С помощью цифровой видеокамеры, цифровой
- 43. Ход работы 2. Через компьютер выбрать из отснятого видеоматериала наиболее значимую для результата упражнения позу исполнителя,
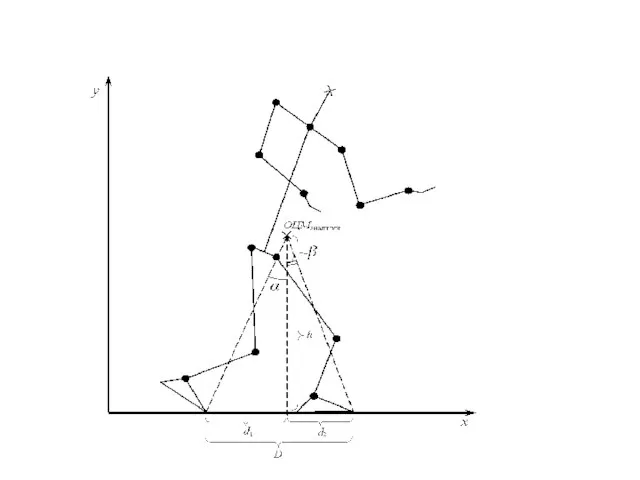
- 44. Нахождение координат 3. На фотографии приблизительно отметить 19 основных точек тела человека, провести около позы прямоугольную
- 47. основные точки тела
- 48. х и у – абсциссы и ординаты следующих основных точек тела человека 1 - центра головы;
- 49. По формулам определить координаты центров тяжести ног и центра тяжести всего тела исполнителя в данной позе
- 50. Общий центр тяжести тела (ОЦТ) Формулы для расчета центра тяжести тела Xоцт=[7*X1+13,63*(X2+X6)+2,57*(X3+X7)+ 0,84*(X4+X8)+X5+X9+16,18*(X10+X15)+ +8,18*(X11+X16)+2,1*(X12+X17)+1,12*(X13 +X18)+0,88*(X14+X19)]/100 Уоцт=[7*У1+13,63*(У2+У6)+2,57*(У3+У7)+
- 51. 5. Найти масштаб анализируемого положения тела Измерив линейкой рост исполнителя на фотографии-h см, определить её масштаб
- 52. найти вес ноги и определить, какой процент её вес составляет от веса всего тела формулы для
- 53. 6. С помощью транспортира измерить в градусах на фото угол ß в коленном суставе любой ноги
- 54. 7. По формулам найти вес его ноги и определить, какой процент её вес составляет от веса
- 56. Скачать презентацию
Различают следующие формы движения:
а) простые формы движения материи – механическую, физическую
Различают следующие формы движения:
а) простые формы движения материи – механическую, физическую
Двигательные действия осуществляются при помощи произвольных активных движений, вызванных управляемой
Двигательные действия осуществляются при помощи произвольных активных движений, вызванных управляемой
Двигательные действия человека, которые изучаются в биомеханике, включают в себя механическое
Двигательные действия человека, которые изучаются в биомеханике, включают в себя механическое
биомеханика составлено из двух греческих слов: Bios - жизнь и
биомеханика составлено из двух греческих слов: Bios - жизнь и
Предмет и объект биомеханики
Биомеханика двигательной деятельности изучает движения человека в процессе
Предмет и объект биомеханики
Биомеханика двигательной деятельности изучает движения человека в процессе
общая задача изучения движений человека в биомеханике двигательных действий
оценка эффективности
общая задача изучения движений человека в биомеханике двигательных действий
оценка эффективности
частные задачи биомеханики
частные задачи биомеханики
Методы исследования биомеханики
Методы биомеханики в наиболее общем виде имеют в своей
Методы исследования биомеханики
Методы биомеханики в наиболее общем виде имеют в своей
системный анализ действий.
системный анализ действий это разложение единого целого на составные
системный анализ действий.
системный анализ действий это разложение единого целого на составные
системный синтез действий
системный синтез действий это способ выявления взаимосвязи частей в
системный синтез действий
системный синтез действий это способ выявления взаимосвязи частей в
Биомеханика делится на три части:
Статика – раздел биомеханики, который изучает
Биомеханика делится на три части:
Статика – раздел биомеханики, который изучает
Методы регистрации характеристик двигательных действий
Методы непосредственного измерения
Методы использования злектротехнических средств (
Методы регистрации характеристик двигательных действий
Методы непосредственного измерения
Методы использования злектротехнических средств (
Опорно-двигательный аппарат
Твердую основу двигательного аппарата составляет его костный осевой
Опорно-двигательный аппарат
Твердую основу двигательного аппарата составляет его костный осевой
Механические свойства мышцы
Упругость проявляется в возникновении напряжения в мышце при ее
Механические свойства мышцы
Упругость проявляется в возникновении напряжения в мышце при ее
Функция скелетных мышц состоит в том, чтобы своим напряжением создать силы
Функция скелетных мышц состоит в том, чтобы своим напряжением создать силы
Силы, приложенные к телу и вызывающие его деформации, называются нагрузками.
Силы, приложенные к телу и вызывающие его деформации, называются нагрузками.
Виды нагрузок
Виды нагрузок
С позиций теории механизмов и машин части тела человека, имеющие подвижные
С позиций теории механизмов и машин части тела человека, имеющие подвижные
степени свободы движения
Движение свободного тела возможно в трех основных направлениях
степени свободы движения
Движение свободного тела возможно в трех основных направлениях

Степени свободы
Степени свободы
Кинематическая пара – это подвижное соединение двух звеньев.
Кинематические пары бывают:
Кинематическая пара – это подвижное соединение двух звеньев.
Кинематические пары бывают:
Кинематическая цепь – это последовательное или разветвленное соединение ряда кинематических пар.
Кинематическая цепь – это последовательное или разветвленное соединение ряда кинематических пар.
Движения в кинематических цепях
Движения в незамкнутых цепях характеризуются относительной независимостью звеньев
Движения в кинематических цепях
Движения в незамкнутых цепях характеризуются относительной независимостью звеньев
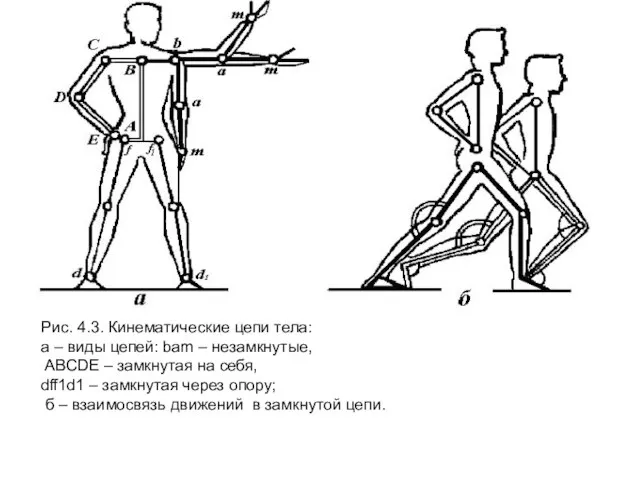
Рис. 4.3. Кинематические цепи тела:
а – виды цепей: bam – незамкнутые,
Рис. 4.3. Кинематические цепи тела:
а – виды цепей: bam – незамкнутые,
Звенья тела, подвижно соединенные в суставах под действием приложенных сил,
Звенья тела, подвижно соединенные в суставах под действием приложенных сил,
Рычаг – это любое твердое тело, имеющее точку опоры (ось вращения)
Рычаг – это любое твердое тело, имеющее точку опоры (ось вращения)
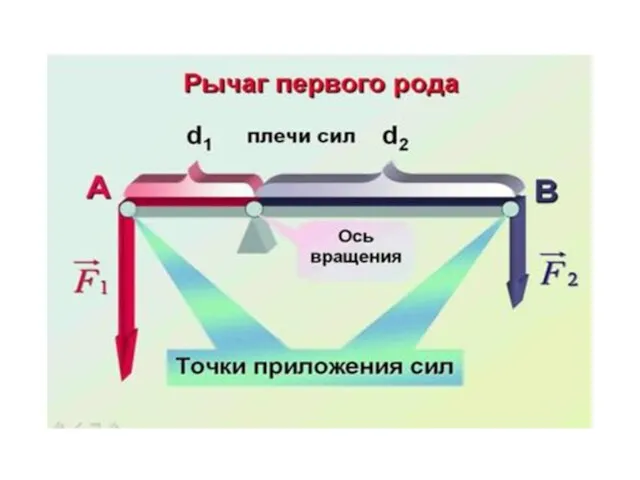

Примером рычага первого рода
Примером рычага первого рода
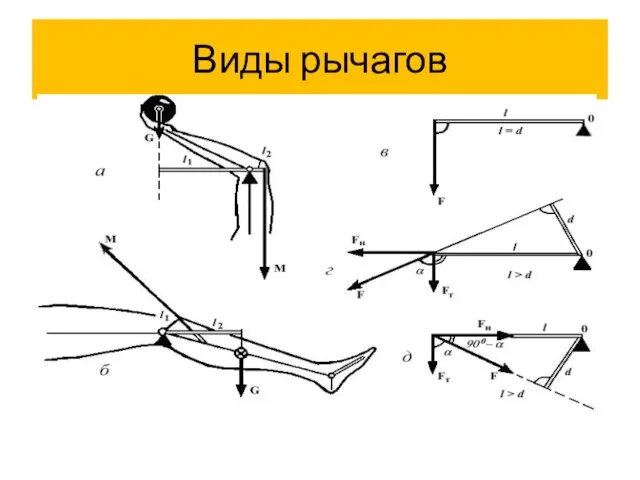
Виды рычагов
Виды рычагов

рычаги третьего рода.
рычаги третьего рода.
Рычажное устройство двигательного аппарата дает человеку возможность выполнять дальние броски, сильные
Рычажное устройство двигательного аппарата дает человеку возможность выполнять дальние броски, сильные
Положение тела человека определяется:
местоположением,
ориентацией относительно системы отсчета,
позой (взаимным
Положение тела человека определяется:
местоположением,
ориентацией относительно системы отсчета,
позой (взаимным
Виды равновесия твердого тела
а) безразличное равновесие – действие силы тяжести
Виды равновесия твердого тела
а) безразличное равновесие – действие силы тяжести
Сохранение положения тела спортсмена достигается при помощи следующих движений:
Компенсаторные движения
Сохранение положения тела спортсмена достигается при помощи следующих движений:
Компенсаторные движения

Управление сохранением положения тела движениями
Управление сохранением положения тела движениями
Задание к контрольной работе
Цель: научиться определять некоторые биомеханические характеристики.
1. С
Задание к контрольной работе
Цель: научиться определять некоторые биомеханические характеристики.
1. С
Ход работы
2. Через компьютер выбрать из отснятого видеоматериала наиболее значимую для результата
Ход работы
2. Через компьютер выбрать из отснятого видеоматериала наиболее значимую для результата
Нахождение координат
3. На фотографии приблизительно отметить 19 основных точек тела человека, провести
Нахождение координат
3. На фотографии приблизительно отметить 19 основных точек тела человека, провести


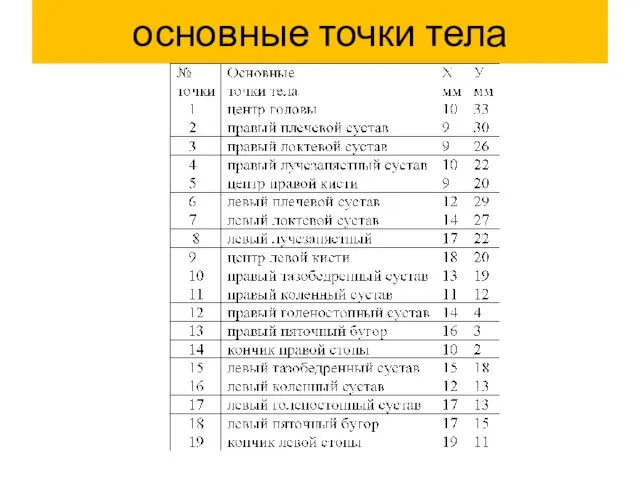
основные точки тела
основные точки тела
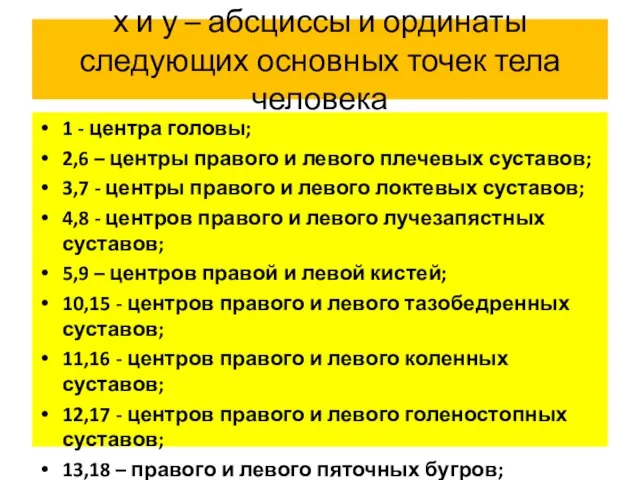
х и у – абсциссы и ординаты следующих основных точек тела
х и у – абсциссы и ординаты следующих основных точек тела
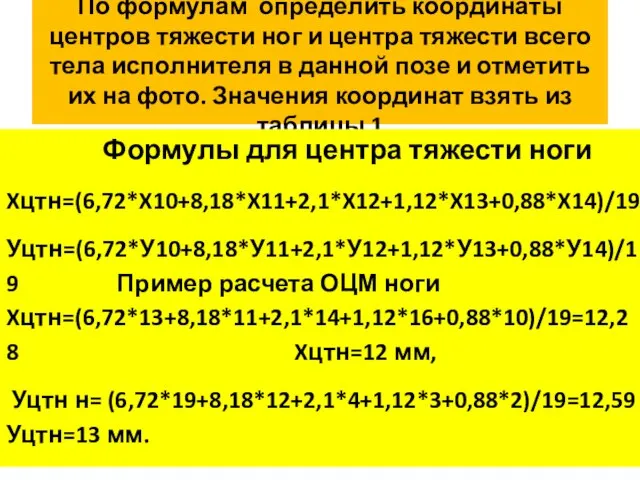
По формулам определить координаты центров тяжести ног и центра тяжести всего
По формулам определить координаты центров тяжести ног и центра тяжести всего
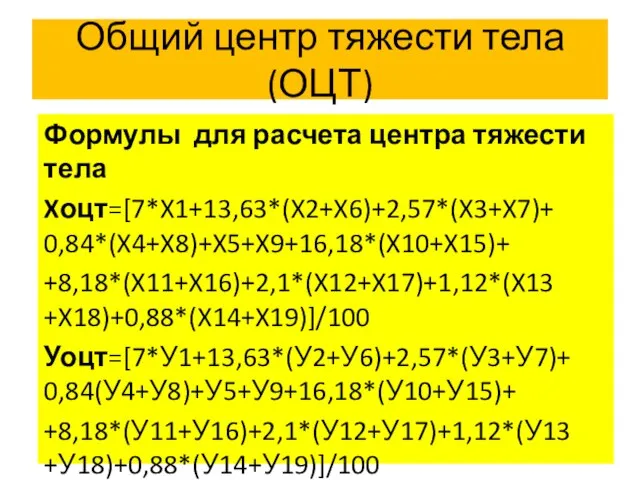
Общий центр тяжести тела (ОЦТ)
Формулы для расчета центра тяжести тела
Xоцт=[7*X1+13,63*(X2+X6)+2,57*(X3+X7)+
Общий центр тяжести тела (ОЦТ)
Формулы для расчета центра тяжести тела
Xоцт=[7*X1+13,63*(X2+X6)+2,57*(X3+X7)+
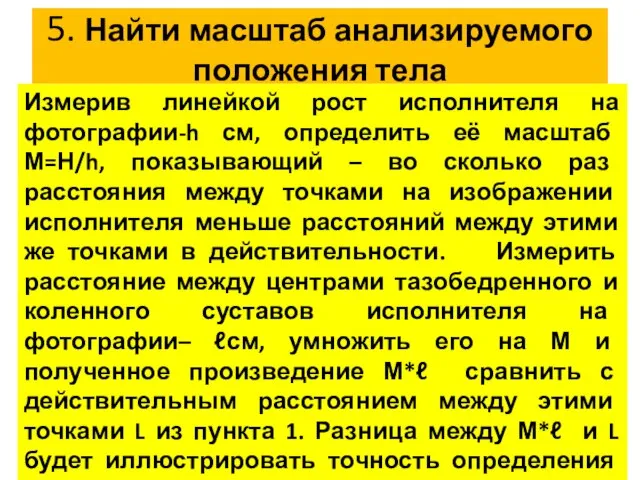
5. Найти масштаб анализируемого положения тела
Измерив линейкой рост исполнителя на фотографии-h
5. Найти масштаб анализируемого положения тела
Измерив линейкой рост исполнителя на фотографии-h
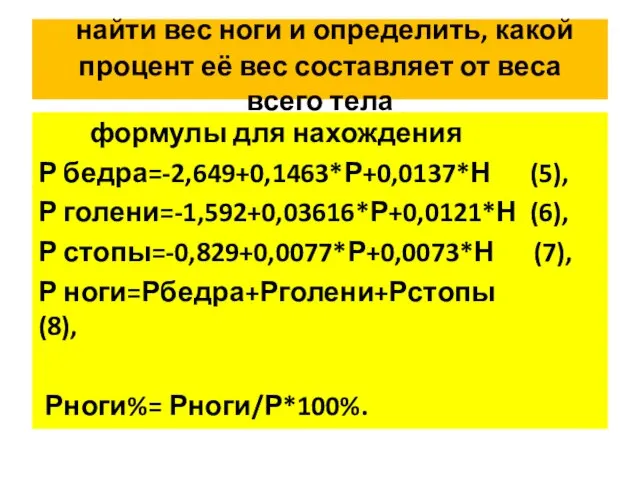
найти вес ноги и определить, какой процент её вес составляет
найти вес ноги и определить, какой процент её вес составляет
6. С помощью транспортира измерить в градусах на фото угол ß
6. С помощью транспортира измерить в градусах на фото угол ß
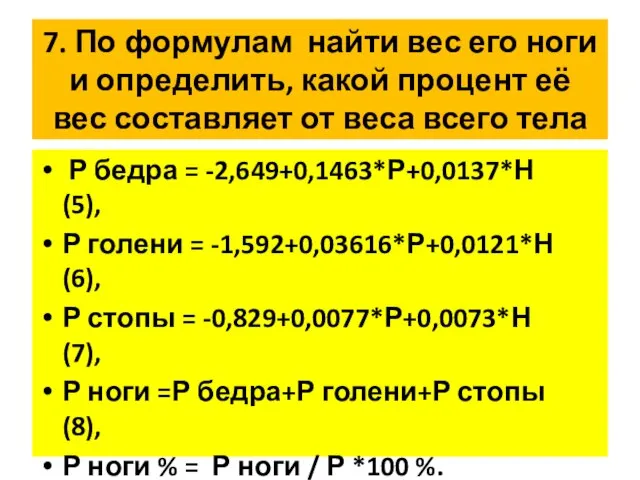
7. По формулам найти вес его ноги и определить, какой процент
7. По формулам найти вес его ноги и определить, какой процент
 Алтайский государственый природный биосферный заповедник
Алтайский государственый природный биосферный заповедник Презентация на тему Формы размножения организмов
Презентация на тему Формы размножения организмов  Размножение животных и воспроизводство населения. Исторические типы воспроизводства населения
Размножение животных и воспроизводство населения. Исторические типы воспроизводства населения Тема урока: «Высшие, или Плацентарные, звери,Отряды: Насекомоядные и Рукокрылые, Грызуны и Зайцеобразные ,Хищные.»
Тема урока: «Высшие, или Плацентарные, звери,Отряды: Насекомоядные и Рукокрылые, Грызуны и Зайцеобразные ,Хищные.» Радуга. 4 класс Прыткова Галина Николаевна
Радуга. 4 класс Прыткова Галина Николаевна  Надання першої допомоги при утопленні
Надання першої допомоги при утопленні  Презентация по экологии СТРУКТУРА ЭКОСИСТЕМЫ
Презентация по экологии СТРУКТУРА ЭКОСИСТЕМЫ  Презентация на тему "Клеточная теория" - скачать презентации по Биологии
Презентация на тему "Клеточная теория" - скачать презентации по Биологии Динамика мозговой активности у двуязычных испытуемых
Динамика мозговой активности у двуязычных испытуемых Растения пустыни
Растения пустыни ДРОБЛЕНИЕ
ДРОБЛЕНИЕ Основная функция зеленого листа
Основная функция зеленого листа Классификация животных. Основные систематические группы. Влияние человека на животных. Знакомство с систематикой животных, их кл
Классификация животных. Основные систематические группы. Влияние человека на животных. Знакомство с систематикой животных, их кл Память. Мышление. Значение памяти
Память. Мышление. Значение памяти Аквариумные рыбки
Аквариумные рыбки Природное сообщество. Экосистема
Природное сообщество. Экосистема Тип Саркожгутиконосцы. Класс Саркодовые (Корненожки)
Тип Саркожгутиконосцы. Класс Саркодовые (Корненожки) Онтогенез и развитие спинного мозга. Строение
Онтогенез и развитие спинного мозга. Строение Развитие эволюционных идей в биологии
Развитие эволюционных идей в биологии ЦИТРУСОВОЕ ХОББИ, или как вырастить лимон в домашних условиях Автор Логунова Наталья, учащаяся 3 "А" класса МОУ гимнази
ЦИТРУСОВОЕ ХОББИ, или как вырастить лимон в домашних условиях Автор Логунова Наталья, учащаяся 3 "А" класса МОУ гимнази Жизнь на материке Австралия
Жизнь на материке Австралия Семейство кошачьих Презентация по биологии . Михайловой Виктории 7 класс
Семейство кошачьих Презентация по биологии . Михайловой Виктории 7 класс  Понятие об анализаторах. Зрительный анализатор
Понятие об анализаторах. Зрительный анализатор Презентация на тему "Моллюски" - скачать презентации по Биологии
Презентация на тему "Моллюски" - скачать презентации по Биологии Экзменационные препараты по гистологии
Экзменационные препараты по гистологии Декоративные растения
Декоративные растения Задачи: Задачи: расширить и углубить знания об оплодотворении у цветковых растений; об оплодотворении вообще и его значении. Об
Задачи: Задачи: расширить и углубить знания об оплодотворении у цветковых растений; об оплодотворении вообще и его значении. Об Жизнедеятельность клетки
Жизнедеятельность клетки