- Автоматизированные системы управления. Цель и задачи курса

Содержание
- 2. Лекция №1 Цель и задачи курса. 1. Краткие исторические сведения. 2. Основные понятия и определения дисциплины.
- 3. Список рекомендуемой литературы Мартыненко и др. Автоматика и автоматизация производственных процессов М. Агропромиздат 1985г. 2. Бородин
- 4. Главные цели автоматизации: повышение производительности труда, обеспечение безопасности работ и улучшение качества продукции при условии оптимального
- 5. Т А У Реальные объекты математические модели 3
- 6. Система регулирования температуры 2
- 7. Автоматическое управление – управление, осуществляемое без непосредственного участия человека. Объект управления (объект регулирования, ОУ) – устройство,
- 8. Ручное управление – все функции управления выполняет человек-оператор. Автоматизированное управление – управление, при котором часть функций
- 9. Входное воздействие (Х) – воздействие, подаваемое на вход системы или устройства. Выходное воздействие (Y) – воздействие,
- 10. Управляющее воздействие (u) - воздействие управляющего устройства на объект управления. Управляющее устройство (УУ) - устройство, осуществляющее
- 11. Ошибка управления (е = х - у) - разность между предписанным (х) и действительным (у) значениями
- 12. УПРАВЛЯЮЩЕЕ УСТРОИСТВО (УУ) – совоку- пность элементов, обеспечивающих управление. АВТОМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОИ- СТВО (АУУ) - устройство,
- 13. Автоматическая система регулирования (АСР) - автоматическая система с замкнутой цепью воздействия, в котором управление (u) вырабатывается
- 14. 2. Методы и функции управления технологическими процессами Сортировка Сигнализация Сбор информации Защита (автоблокировка) Дистанционное управление Измерение
- 15. А в т о м а т и ч е с к и е и з
- 16. А в т о м а т и ч е с к и й с б
- 17. Телемеханическое управление – АУ, предназначенные автоматической передачи на расстояние команд управления и получения информации о состоянии
- 18. 3. К л а с с и ф и к а ц и я С А
- 19. Н е д о с т а т о к – невозможность коррекции управления при нежелательном
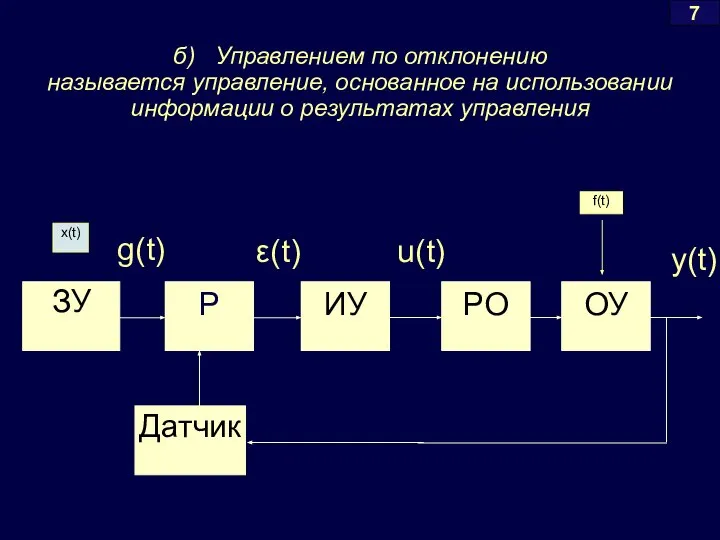
- 20. б) Управлением по отклонению называется управление, основанное на использовании информации о результатах управления 7 f(t) x(t)
- 21. Этот принцип управления называется принципом обратной связи (ОС) или замкнутым управлением Основной н е д о
- 22. Если можно измерить возмущение, то этот сигнал можно использовать в разомкнутой САУ для увеличения ее точности.
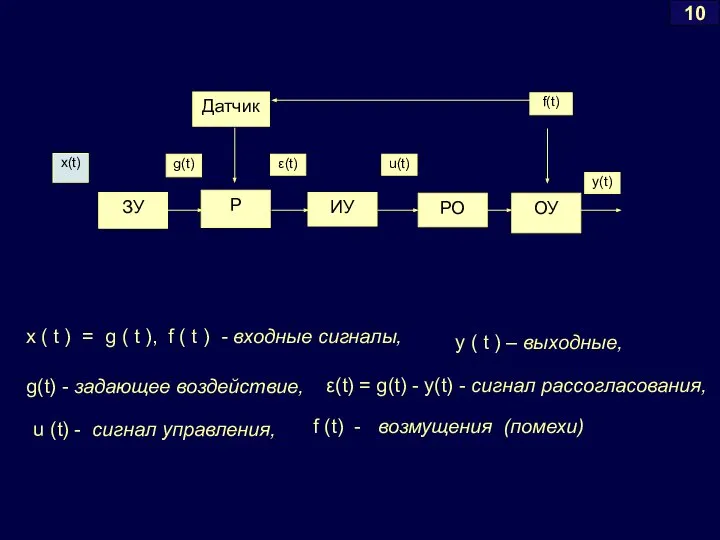
- 23. Датчик Р ЗУ ИУ РО ОУ f(t) g(t) ε(t) y(t) u(t) x(t) x ( t )
- 24. САУ, основанные на одновременном использовании принципов управления по отклонению и по возмущению, называются к о м
- 25. Датчик Р Датчик ЗУ ИУ РО ОУ f(t) g(t) ε(t) y(t) u(t) x(t) x ( t
- 26. 1.2 По виду задающего воздействия САУ с ОС бывают: - следящими, - стабилизации - программного управления
- 27. Системой стабилизации называется следящая САУ при постоянном задающем воздействии: g(t) = const Следящей называется САУ, предназначенная
- 29. Скачать презентацию
Лекция №1
Цель и задачи курса.
1. Краткие исторические сведения.
2. Основные понятия
Лекция №1 Цель и задачи курса. 1. Краткие исторические сведения. 2. Основные понятия
Список рекомендуемой литературы
Мартыненко и др. Автоматика и автоматизация производственных процессов М.
Список рекомендуемой литературы
Мартыненко и др. Автоматика и автоматизация производственных процессов М.
Главные цели автоматизации:
повышение производительности труда,
обеспечение безопасности работ
Главные цели автоматизации:
повышение производительности труда,
обеспечение безопасности работ
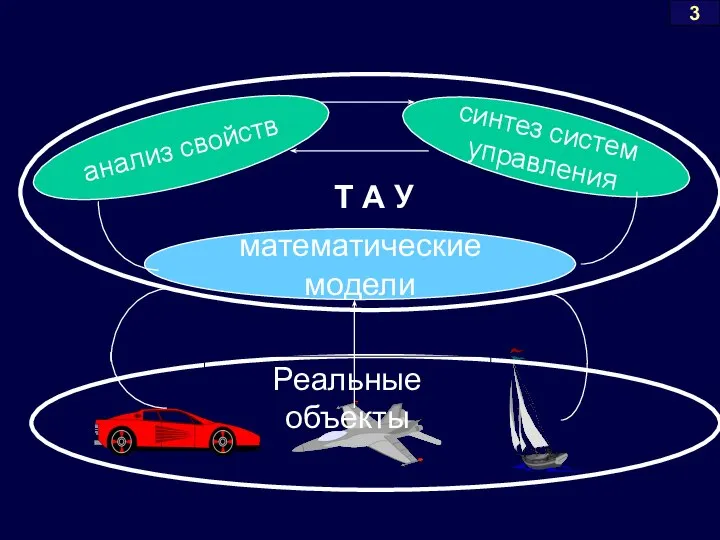
Т А У
Реальные объекты
математические модели
3
Т А У
Реальные объекты
математические модели
3
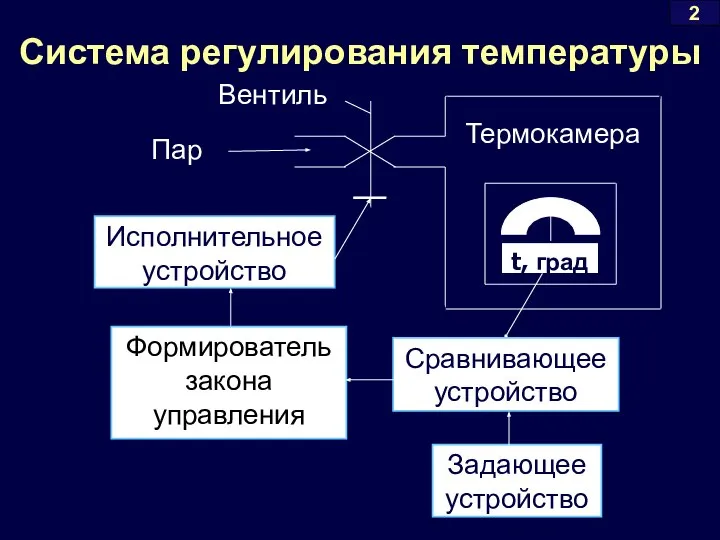
Система регулирования температуры
2
Система регулирования температуры
2
Автоматическое управление – управление, осуществляемое без непосредственного участия человека.
Автоматическое управление – управление, осуществляемое без непосредственного участия человека.
Ручное управление – все функции управления выполняет человек-оператор.
Автоматизированное
Ручное управление – все функции управления выполняет человек-оператор.
Автоматизированное
Входное воздействие (Х) – воздействие, подаваемое на вход системы или
Входное воздействие (Х) – воздействие, подаваемое на вход системы или
Управляющее воздействие (u) - воздействие управляющего устройства на объект управления.
Управляющее устройство
Управляющее воздействие (u) - воздействие управляющего устройства на объект управления.
Управляющее устройство
Ошибка управления (е = х - у) - разность между предписанным
Ошибка управления (е = х - у) - разность между предписанным

УПРАВЛЯЮЩЕЕ УСТРОИСТВО (УУ) – совоку-
пность элементов, обеспечивающих управление.
АВТОМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОИ-
СТВО (АУУ)
УПРАВЛЯЮЩЕЕ УСТРОИСТВО (УУ) – совоку-
пность элементов, обеспечивающих управление.
АВТОМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОИ-
СТВО (АУУ)

Автоматическая система регулирования (АСР) - автоматическая система с замкнутой цепью
Автоматическая система регулирования (АСР) - автоматическая система с замкнутой цепью

2. Методы и функции управления
технологическими процессами
Сортировка
Сигнализация
Сбор
информации
Защита
(автоблокировка)
Дистанционное
2. Методы и функции управления
технологическими процессами
Сортировка
Сигнализация
Сбор
информации
Защита
(автоблокировка)
Дистанционное
А в т о м а т и ч е с
А в т о м а т и ч е с
А в т о м а т и ч е с

Телемеханическое управление
– АУ, предназначенные автоматической передачи на расстояние команд управления
– АУ, предназначенные автоматической передачи на расстояние команд управления
3. К л а с с и ф и к а
3. К л а с с и ф и к а
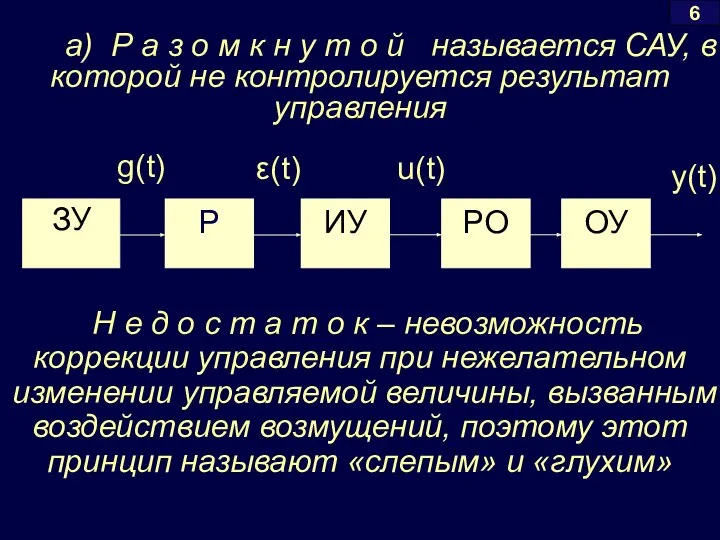
Н е д о с т а т о к
Н е д о с т а т о к
б) Управлением по отклонению
называется управление, основанное на использовании информации о результатах
б) Управлением по отклонению
называется управление, основанное на использовании информации о результатах
Этот принцип управления называется принципом обратной связи (ОС)
или замкнутым управлением
Основной
Этот принцип управления называется принципом обратной связи (ОС)
или замкнутым управлением
Основной
Если можно измерить возмущение, то этот сигнал можно использовать в разомкнутой
Если можно измерить возмущение, то этот сигнал можно использовать в разомкнутой
Датчик
Р
ЗУ
ИУ
РО
ОУ
f(t)
g(t)
ε(t)
y(t)
u(t)
x(t)
x ( t ) = g ( t ), f
Датчик
Р
ЗУ
ИУ
РО
ОУ
f(t)
g(t)
ε(t)
y(t)
u(t)
x(t)
x ( t ) = g ( t ), f
САУ, основанные на одновременном использовании принципов управления по отклонению и по
САУ, основанные на одновременном использовании принципов управления по отклонению и по

Датчик
Р
Датчик
ЗУ
ИУ
РО
ОУ
f(t)
g(t)
ε(t)
y(t)
u(t)
x(t)
x ( t ) = g ( t ), f
Датчик
Р
Датчик
ЗУ
ИУ
РО
ОУ
f(t)
g(t)
ε(t)
y(t)
u(t)
x(t)
x ( t ) = g ( t ), f

1.2 По виду задающего воздействия САУ с ОС бывают:
-
1.2 По виду задающего воздействия САУ с ОС бывают:
-
Системой стабилизации называется следящая САУ при
постоянном задающем воздействии: g(t)
Системой стабилизации называется следящая САУ при
постоянном задающем воздействии: g(t)
 Системы автоматического управления (САУ). Теория автоматического управления (ТАУ)
Системы автоматического управления (САУ). Теория автоматического управления (ТАУ) ОКРУЖНОЙ НАУЧНО-ПРАКТИЧЕСКИЙ СЕМИНАР ЛИЧНОСТНО ОРИЕНТИРОВАННОЕ ОБУЧЕНИЕ 7класс урок физики по теме: учитель высше
ОКРУЖНОЙ НАУЧНО-ПРАКТИЧЕСКИЙ СЕМИНАР ЛИЧНОСТНО ОРИЕНТИРОВАННОЕ ОБУЧЕНИЕ 7класс урок физики по теме: учитель высше Презентация по физике Скорость света
Презентация по физике Скорость света  Галилео Галилей
Галилео Галилей Розробка математичної моделі фазованої антенної решітки СВЦ 9С18М1
Розробка математичної моделі фазованої антенної решітки СВЦ 9С18М1 Сообщающиеся сосуды
Сообщающиеся сосуды Основы хроматографического анализа
Основы хроматографического анализа Биомеханические принципы в технике Носова Дарья, ученица 10 А класса МОУ «Средняя общеобразовательная школа» №57 г. Курска
Биомеханические принципы в технике Носова Дарья, ученица 10 А класса МОУ «Средняя общеобразовательная школа» №57 г. Курска Передачи винт- гайка
Передачи винт- гайка Звуки
Звуки  Оптические методы анализа
Оптические методы анализа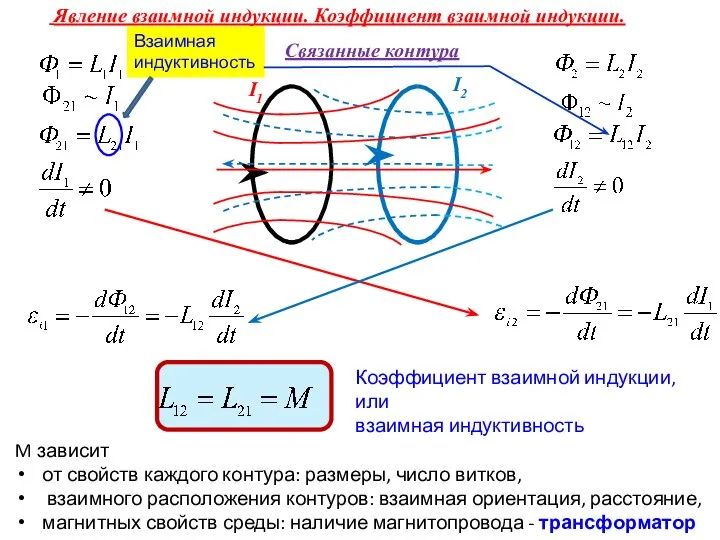 Явление взаимной индукции. Коэффициент взаимной индукции. Взаимная индуктивность
Явление взаимной индукции. Коэффициент взаимной индукции. Взаимная индуктивность Механическое движение
Механическое движение Автоколебания. Трансформатор
Автоколебания. Трансформатор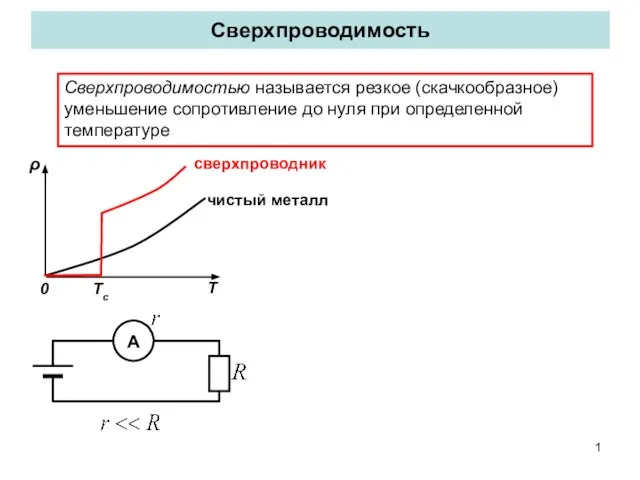 Сверхпроводимость. Криопроводники
Сверхпроводимость. Криопроводники Линейные электрические цепи постоянного тока
Линейные электрические цепи постоянного тока Физика - первые шаги (3 класс)
Физика - первые шаги (3 класс) Энергия топлива
Энергия топлива Презентация по физике "Определение поверхностного натяжения" - скачать
Презентация по физике "Определение поверхностного натяжения" - скачать  Высокоэнергетические материалы в системах детонационной автоматики аэрокосмических аппаратов
Высокоэнергетические материалы в системах детонационной автоматики аэрокосмических аппаратов Эквивалентные преобразования схем
Эквивалентные преобразования схем Механическая работа. Единицы работы. Мощность. Единицы мощности
Механическая работа. Единицы работы. Мощность. Единицы мощности Наша группа работала над вопросом
Наша группа работала над вопросом Функциональная схема скоростной САР
Функциональная схема скоростной САР Строение атома. Урок №7
Строение атома. Урок №7 Передача электрической энергии на расстояние
Передача электрической энергии на расстояние Тепловые машины. (8 класс)
Тепловые машины. (8 класс) Электротехника и электроника. Электрические цепи постоянного тока. (Лекция 1)
Электротехника и электроника. Электрические цепи постоянного тока. (Лекция 1)