- Динамический расчет ферм

Содержание
- 2. Динамическая степень свободы n=2У-С0, где У – количество узлов, в которых распределены массы фермы, С0 –
- 3. Расчетная схема фермы с конечным числом сосредоточенных масс
- 4. Уравнение для определения собственных частот По аналогии с системами с n степенями свободы, записываем канонические уравнения
- 5. Узловые перемещения Вырежем из фермы любой узел k и рассмотрим его равновесие. Каждый соседний с ним
- 6. Уравнения динамического равновесия при свободных колебаниях
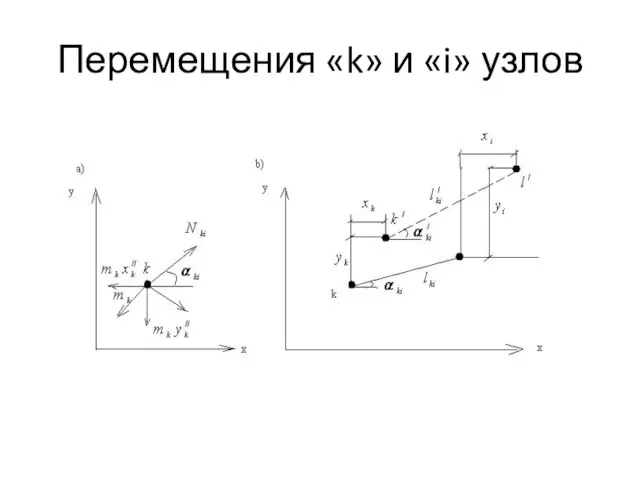
- 7. Перемещения «k» и «i» узлов
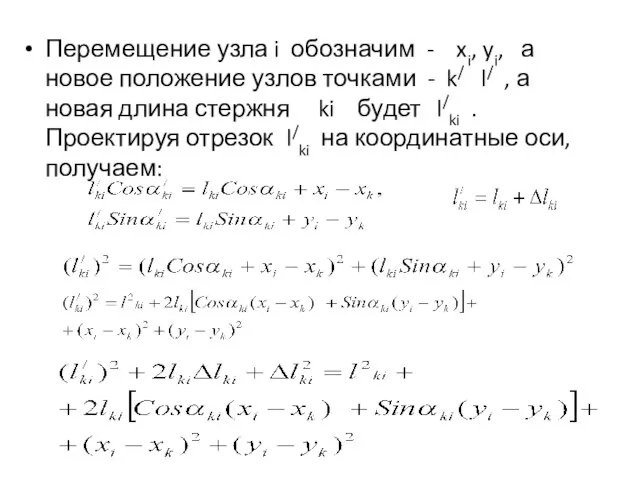
- 8. Перемещение узла i обозначим - xi, yi, а новое положение узлов точками - k/ l/ ,
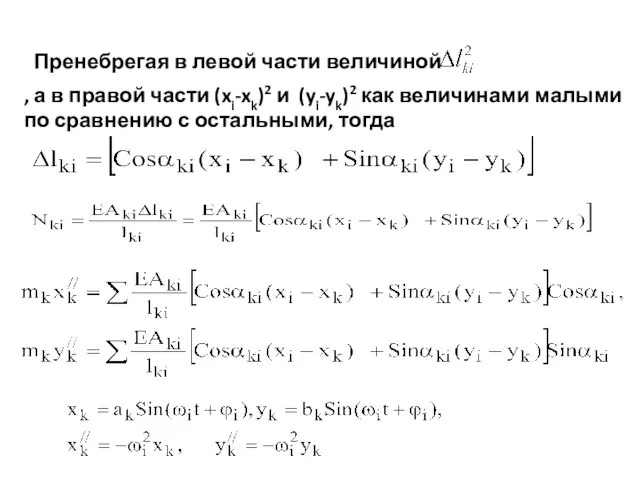
- 9. Пренебрегая в левой части величиной , а в правой части (xi-xk)2 и (yi-yk)2 как величинами малыми
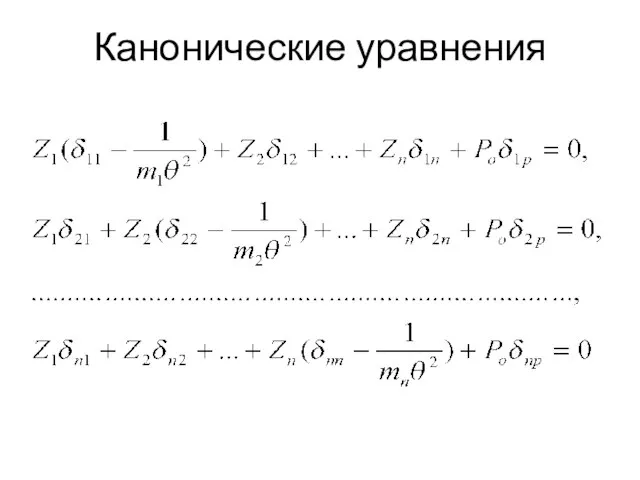
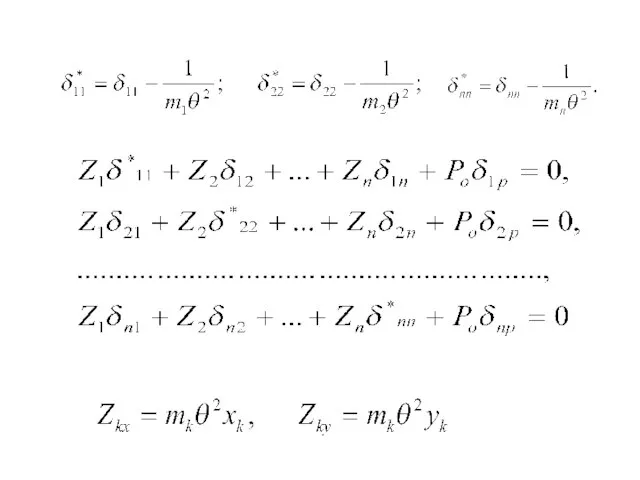
- 10. Вынужденные колебания ферм при вибрационной нагрузке Канонические уравнения вынужденных колебаний ферм при вибрационной нагрузке P=P0 Sinθt
- 11. Канонические уравнения
- 12. …..
- 13. Нагрузки, действующие на узел k
- 15. Скачать презентацию
Динамическая степень свободы
n=2У-С0,
где У – количество узлов, в которых распределены
Динамическая степень свободы
n=2У-С0,
где У – количество узлов, в которых распределены

Расчетная схема фермы с конечным числом сосредоточенных масс
Расчетная схема фермы с конечным числом сосредоточенных масс
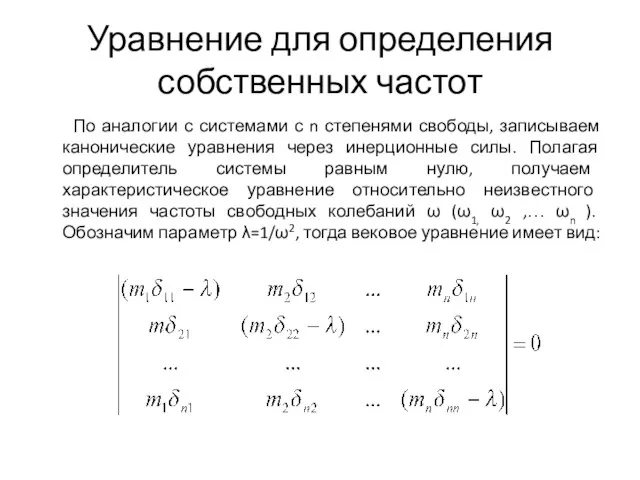
Уравнение для определения собственных частот
По аналогии с системами с n
Уравнение для определения собственных частот
По аналогии с системами с n
Узловые перемещения
Вырежем из фермы любой узел k и рассмотрим его равновесие.
Узловые перемещения
Вырежем из фермы любой узел k и рассмотрим его равновесие.
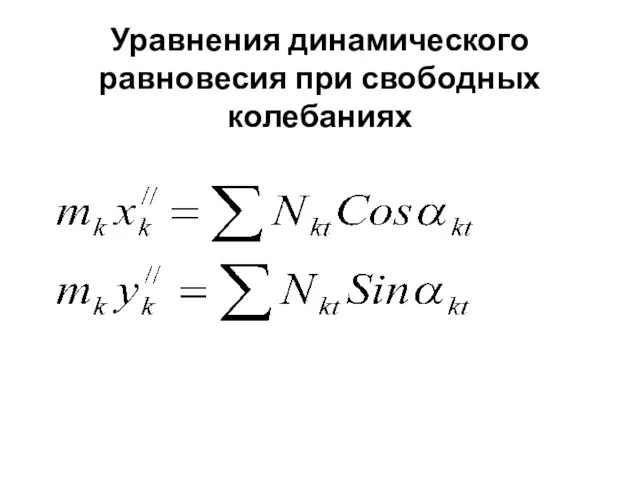
Уравнения динамического равновесия при свободных колебаниях
Уравнения динамического равновесия при свободных колебаниях
Перемещения «k» и «i» узлов
Перемещения «k» и «i» узлов
Перемещение узла i обозначим - xi, yi, а новое положение узлов
Перемещение узла i обозначим - xi, yi, а новое положение узлов
Пренебрегая в левой части величиной
, а в правой части (xi-xk)2
Пренебрегая в левой части величиной
, а в правой части (xi-xk)2

Вынужденные колебания ферм при вибрационной нагрузке
Канонические уравнения вынужденных колебаний ферм
Вынужденные колебания ферм при вибрационной нагрузке
Канонические уравнения вынужденных колебаний ферм
Канонические уравнения
Канонические уравнения
…..
…..
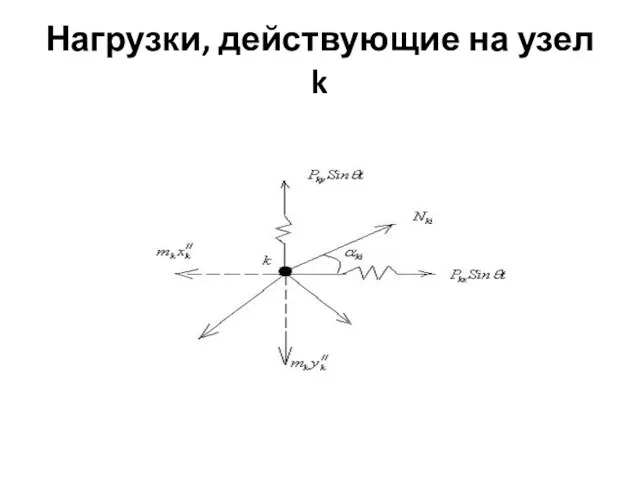
Нагрузки, действующие на узел k
Нагрузки, действующие на узел k
 Презентация по физике "Фазовый переход пар — жидкость" - скачать
Презентация по физике "Фазовый переход пар — жидкость" - скачать  Аттестационная работа. Программа регионального компонента образовательной области Физика
Аттестационная работа. Программа регионального компонента образовательной области Физика Моделирование электрофизических свойств gaas методом монте-карло
Моделирование электрофизических свойств gaas методом монте-карло Взаимодействие тел. Масса
Взаимодействие тел. Масса Неединичные обратные связи и инвариантность системы к задающему воздействию
Неединичные обратные связи и инвариантность системы к задающему воздействию Двигатель внутреннего сгорания
Двигатель внутреннего сгорания Подвижной состав автомобильного транспорта
Подвижной состав автомобильного транспорта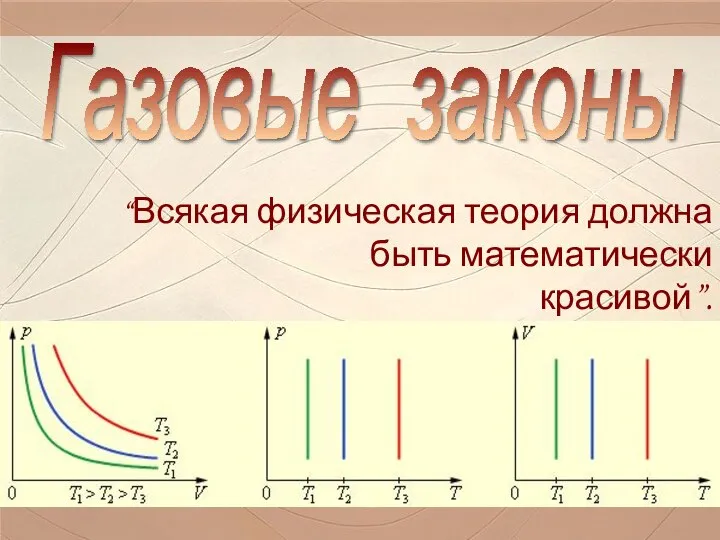 Газовые законы
Газовые законы Анализ и расчёт магнитных цепей
Анализ и расчёт магнитных цепей 8.5. ЦИКЛЫ ГАЗОТУРБИННЫХ УСТАНОВОК. Газотурбинные установки (ГТУ) имеют многие важные преимущества по сравнению с поршневыми д
8.5. ЦИКЛЫ ГАЗОТУРБИННЫХ УСТАНОВОК. Газотурбинные установки (ГТУ) имеют многие важные преимущества по сравнению с поршневыми д Гармонические колебания
Гармонические колебания Газовые законы
Газовые законы Лазерная техника и технология
Лазерная техника и технология След Архимеда Работу выполнили Ученики 6 «А», «Б» класса М О У школы №93 Варлашин Сергей Александрович ; Лисецкий Илья Анатольевич
След Архимеда Работу выполнили Ученики 6 «А», «Б» класса М О У школы №93 Варлашин Сергей Александрович ; Лисецкий Илья Анатольевич Презентация по физике Вес тела и сила тяжести
Презентация по физике Вес тела и сила тяжести Механические колебания
Механические колебания Электрический ток в вакууме Урок физики. 10 класс.
Электрический ток в вакууме Урок физики. 10 класс.  Закон всемирного тяготения
Закон всемирного тяготения Электронные лекции по разделам классической и релятивистской механики
Электронные лекции по разделам классической и релятивистской механики Практикум із розв’язування задач
Практикум із розв’язування задач Энергетика
Энергетика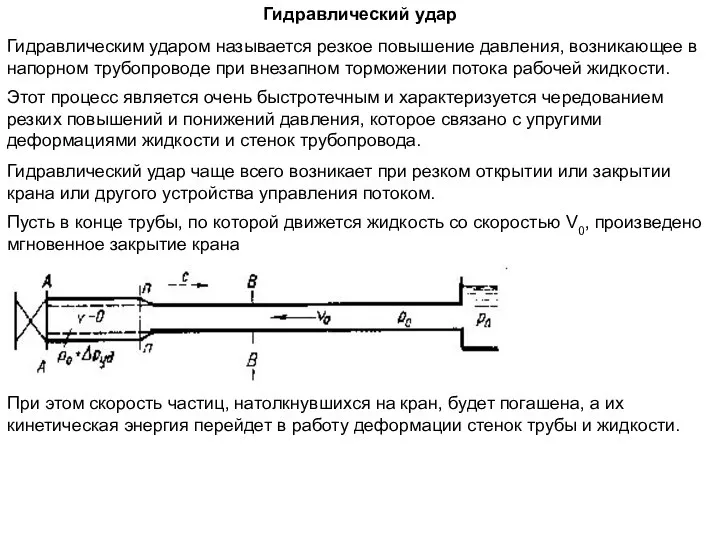 Гидравлический удар. Гидравлический таран
Гидравлический удар. Гидравлический таран Магнитное поле Земли
Магнитное поле Земли Имитационное моделирование движения механизмов
Имитационное моделирование движения механизмов История создания швейной машины
История создания швейной машины Преобразователи постоянного напряжения без потенциальной развязки
Преобразователи постоянного напряжения без потенциальной развязки Акустический шум и его воздействие на человека МОУ- Средняя общеобразовательная школа № 11 Выполнила ученица 9 «Г»класса Каштано
Акустический шум и его воздействие на человека МОУ- Средняя общеобразовательная школа № 11 Выполнила ученица 9 «Г»класса Каштано Програмна реалізація фрактальної моделі броунівського руху
Програмна реалізація фрактальної моделі броунівського руху