- Експериментальне дослідження системи частотно-регульованого електропривода

Содержание
- 2. Проведемо дослідження розробленої системи автоматичного регулювання швидкості обертання асинхронного двигуна з використанням частотного перетворювача. Дослідження САК
- 3. При моделюванні напівпровідникових систем електропривода використовуються в основному три типи моделей: функціональні моделі; структурні моделі; віртуальні
- 4. Моделювання перехідного процесу в середовищі MATLAB Для моделювання системи автоматичного регулювання швидкості обертання асинхронного двигуна з
- 5. Параметри двигуна
- 6. За технічними характеристиками двигуна визначимо: номінальну кутову швидкість: номінальний момент: критичний момент: пусковий момент: ковзання: Підставивши
- 7. Передаточна функція перетворювача частоти: Передаточна функція асинхронного двигуна складається з двох частин: Передаточна функція давача: Структурна
- 8. Оптимізація параметрів регулятора Для визначення оптимальних настроювальних параметрів регулятора скористаємося програмою MatLab, зокрема її пакетом NCD.
- 9. Схема для оптимізації нашого перехідного процесу матиме вигляд: Структурна схема оптимізації перехідного процесу Діалогове вікно настроювань
- 10. Дослідження реальних перехідних характеристик Для зняття реальних перехідних характеристик роботи двигуна була написана програма прийому даних
- 11. Для зняття експериментальних перехідних характеристик привода при зміні навантаження склали схему, яка зображена Вона складається з
- 12. Перехідна характеристика приводу при миттєвому збільшенні навантаження (струм фази І=1,8А, напруга фази U=78В; корисна потужність Р=120Вт),
- 14. Скачать презентацию
Проведемо дослідження розробленої системи автоматичного регулювання швидкості обертання асинхронного двигуна з
Проведемо дослідження розробленої системи автоматичного регулювання швидкості обертання асинхронного двигуна з
При моделюванні напівпровідникових систем електропривода використовуються в основному три типи моделей:
При моделюванні напівпровідникових систем електропривода використовуються в основному три типи моделей:
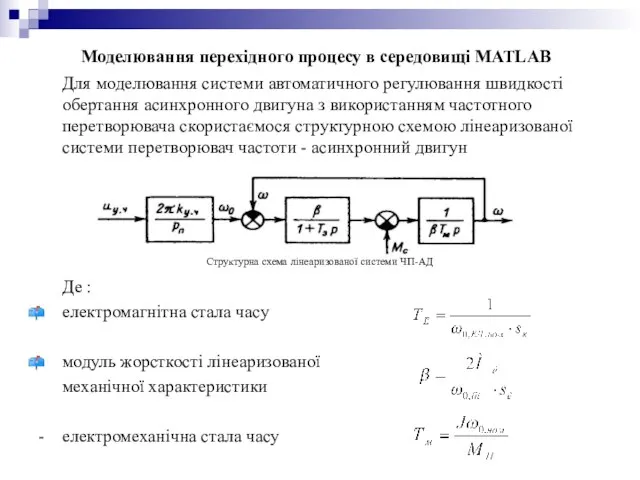
Моделювання перехідного процесу в середовищі MATLAB
Для моделювання системи автоматичного регулювання швидкості
Моделювання перехідного процесу в середовищі MATLAB
Для моделювання системи автоматичного регулювання швидкості
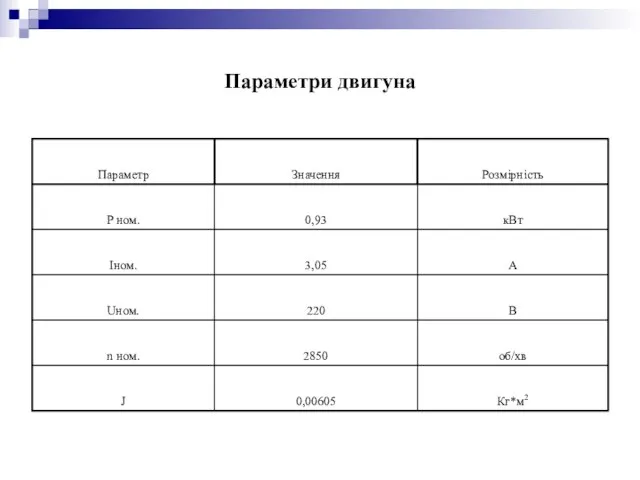
Параметри двигуна
Параметри двигуна
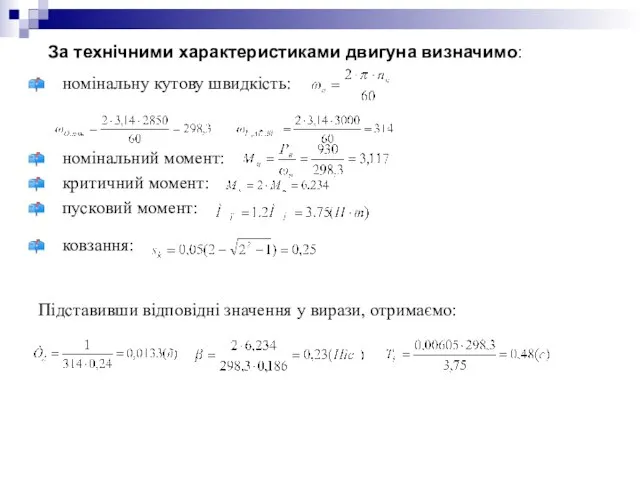
За технічними характеристиками двигуна визначимо:
номінальну кутову швидкість:
номінальний момент:
критичний момент:
пусковий
За технічними характеристиками двигуна визначимо:
номінальну кутову швидкість:
номінальний момент:
критичний момент:
пусковий
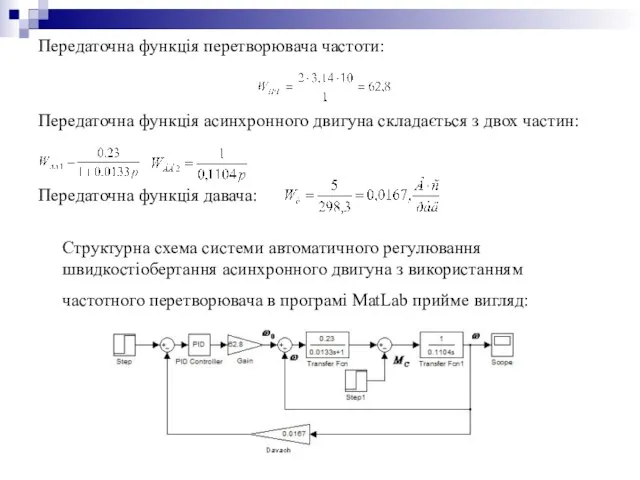
Передаточна функція перетворювача частоти:
Передаточна функція асинхронного двигуна складається з двох частин:
Передаточна
Передаточна функція перетворювача частоти:
Передаточна функція асинхронного двигуна складається з двох частин:
Передаточна
Оптимізація параметрів регулятора
Для визначення оптимальних настроювальних параметрів регулятора скористаємося програмою
Оптимізація параметрів регулятора
Для визначення оптимальних настроювальних параметрів регулятора скористаємося програмою
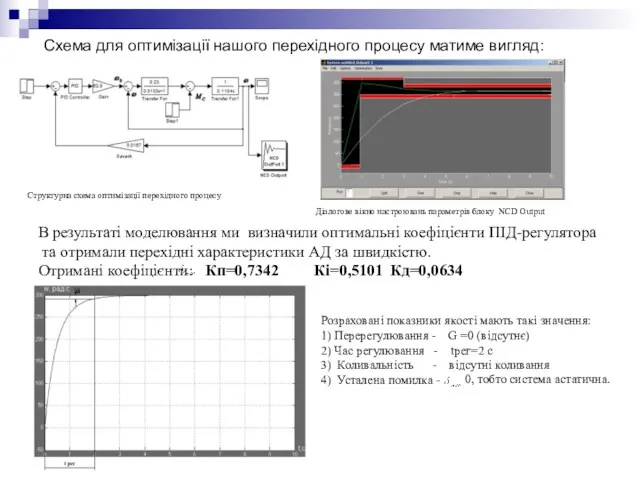
Схема для оптимізації нашого перехідного процесу матиме вигляд:
Структурна схема оптимізації перехідного
Схема для оптимізації нашого перехідного процесу матиме вигляд:
Структурна схема оптимізації перехідного
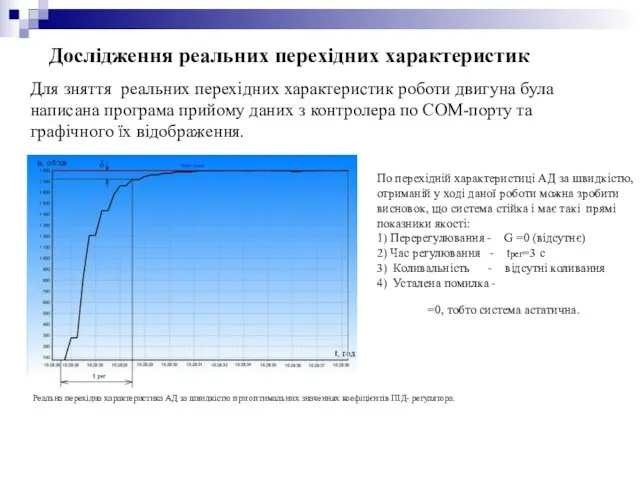
Дослідження реальних перехідних характеристик
Для зняття реальних перехідних характеристик роботи
Дослідження реальних перехідних характеристик
Для зняття реальних перехідних характеристик роботи

Для зняття експериментальних перехідних характеристик привода при зміні навантаження склали схему,
Для зняття експериментальних перехідних характеристик привода при зміні навантаження склали схему,
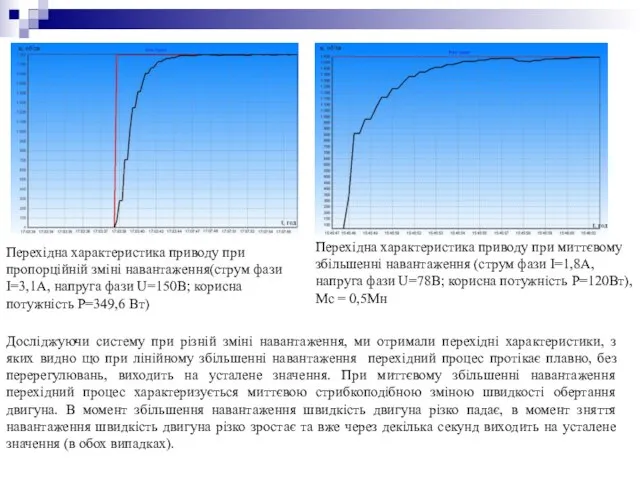
Перехідна характеристика приводу при миттєвому збільшенні навантаження (струм фази І=1,8А, напруга
Перехідна характеристика приводу при миттєвому збільшенні навантаження (струм фази І=1,8А, напруга
 Приспособления к швейной машине
Приспособления к швейной машине Строение атома
Строение атома Закон Ома для участка цепи
Закон Ома для участка цепи Гармонические колебания
Гармонические колебания Задачи
Задачи Решение задач по теме «Оптика. Световые волны»
Решение задач по теме «Оптика. Световые волны» Тест. 8 класс
Тест. 8 класс Шкала электромагнитных волн
Шкала электромагнитных волн Электрические колебания
Электрические колебания Replacement of compressor
Replacement of compressor Шкала электромагнитных излучений
Шкала электромагнитных излучений Прямолинейное равномерное и равнопеременное движение. Тест
Прямолинейное равномерное и равнопеременное движение. Тест Эксплуатационные требования к САУТ-ЦМ
Эксплуатационные требования к САУТ-ЦМ Жидкостно-сцинтилляционная спектроскопия
Жидкостно-сцинтилляционная спектроскопия Атомның энергетикалық деңгейлері
Атомның энергетикалық деңгейлері Водяной пар в атмосфере
Водяной пар в атмосфере Electrical circuits
Electrical circuits Молярлық көлем
Молярлық көлем Детали машин и основы конструирования
Детали машин и основы конструирования Отримання та застосування радіонуклідів. Радіоактивний захист людини
Отримання та застосування радіонуклідів. Радіоактивний захист людини  Действие магнитного поля на заряженную частицу. Сила Лоренца
Действие магнитного поля на заряженную частицу. Сила Лоренца 10 класс ФИЗИКА И ПОЗНАНИЕ МИРА Презентация
10 класс ФИЗИКА И ПОЗНАНИЕ МИРА Презентация Электричесие явления (10 класс)
Электричесие явления (10 класс) Презентация по физике "Гармонические колебания точки" - скачать
Презентация по физике "Гармонические колебания точки" - скачать  Плотность вещества. 7 класс
Плотность вещества. 7 класс Первое начало термодинамики. Теплота и работа
Первое начало термодинамики. Теплота и работа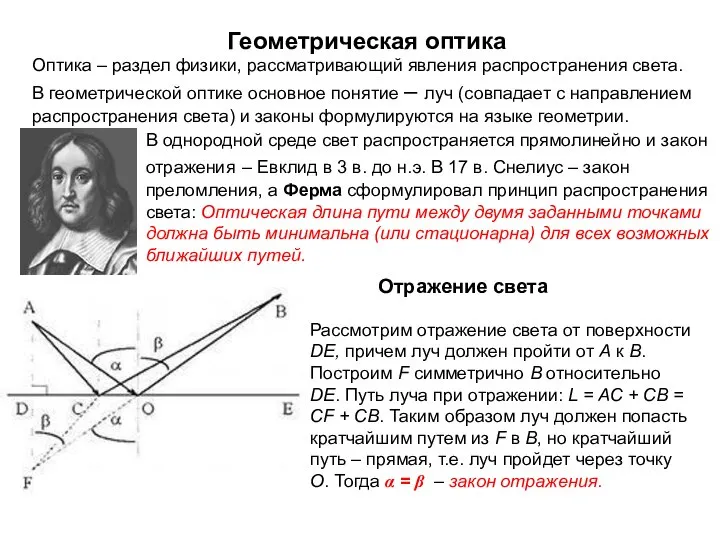 Геометрическая оптика
Геометрическая оптика Биологическое действие радиации
Биологическое действие радиации