Исследование устойчивости контура неавтоматического управления. Электродистанционные системы управления самолетом
- Исследование устойчивости контура неавтоматического управления. Электродистанционные системы управления самолетом

Содержание
- 2. 1.4. Свойства летчика-оператора в контуре неавтоматического управления Действия летчика могут быть представлены динамической системой, описывающей последовательность
- 3. Нервномышечный блок характеризует запаздывание между командой, идущей в моторную систему, и реакцией перемещения руки летчика на
- 4. 1.5. Исследование устойчивости замкнутого контура управления «летчик – СНУ – самолет» Летчик оценивает обычно объект как
- 5. Передаточная функция контура будет определяться следующим образом: Передаточная функция изменения перегрузки самолета при отклонении стабилизатора имеет
- 6. Анализ данной передаточной функции показывает, что динамические свойства замкнутого контура зависят от свойств самолета, свойств СНУ
- 7. 1.6. Возможные отказы системы неавтоматического управления К наиболее часто встречающимся неисправностям СНУ относятся: повышенные усилия трения.
- 8. 1.7. Электродистанционные системы управления Переход к ЭДСУ обусловлен следующими обстоятельствами: обеспечением необходимого качества управления неустойчивым самолетом;
- 10. Пульт управления ЭДСУ
- 11. Конструкция механической части ЭДСУ Рис. 1.9. Механические элементы ЭДСУ: 1 – тяга от ручки управления; 2
- 12. Исполнительное устройство ЭДСУ Рис. 1.10. Электрогидравлический привод РПД1Б: 1 – распределительное устройство; 2 – гидроцилиндр; 3
- 13. Способы обеспечения надежности ЭДСУ Основным направлением обеспечения заданной надежности ЭДСУ следует считать повышение надежности ее отдельных
- 15. Скачать презентацию
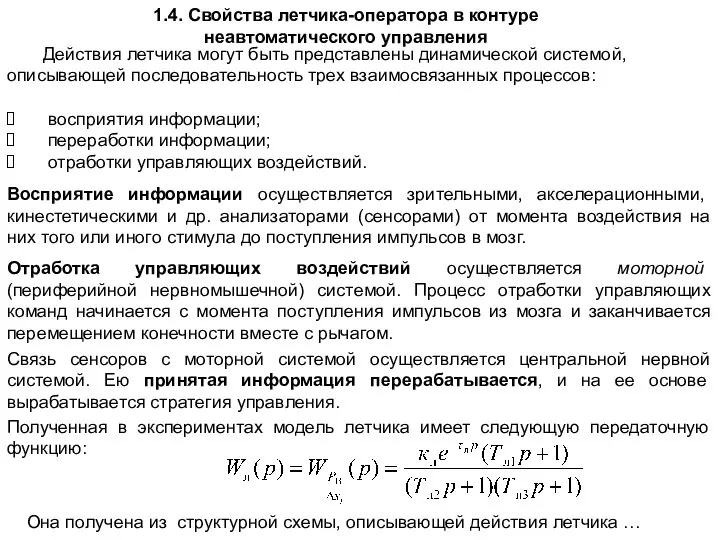
1.4. Свойства летчика-оператора в контуре
неавтоматического управления
Действия летчика могут быть представлены
1.4. Свойства летчика-оператора в контуре
неавтоматического управления
Действия летчика могут быть представлены
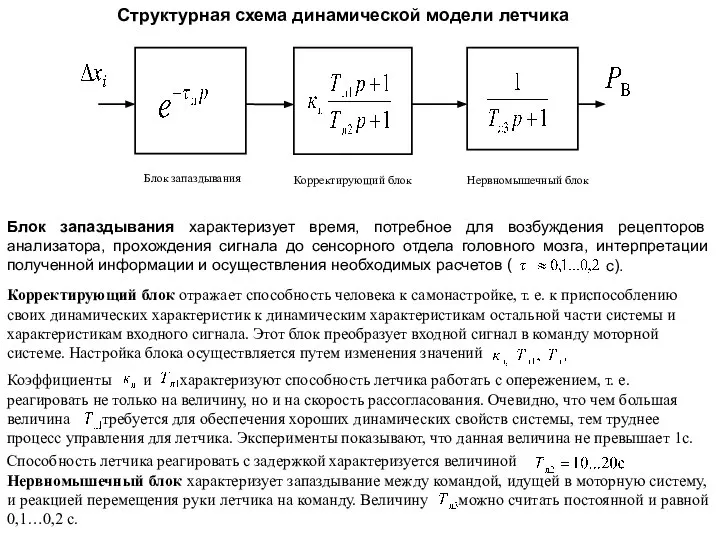
Нервномышечный блок характеризует запаздывание между командой, идущей в моторную систему, и
Нервномышечный блок характеризует запаздывание между командой, идущей в моторную систему, и
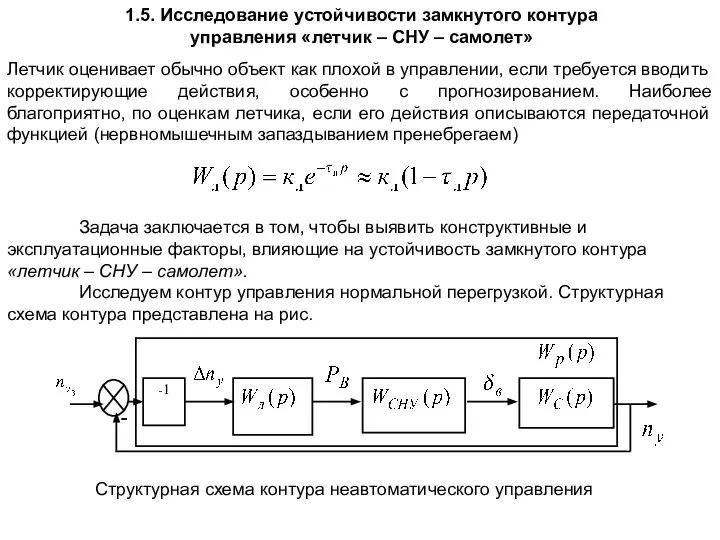
1.5. Исследование устойчивости замкнутого контура
управления «летчик – СНУ – самолет»
Летчик оценивает
1.5. Исследование устойчивости замкнутого контура
управления «летчик – СНУ – самолет»
Летчик оценивает
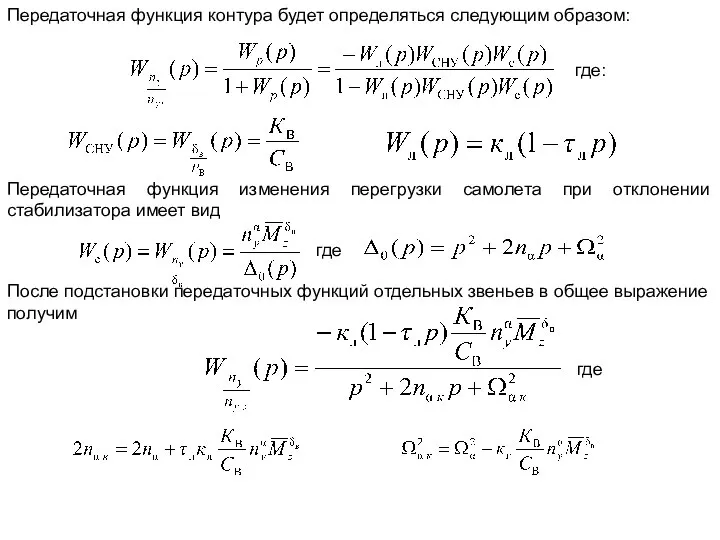
Передаточная функция контура будет определяться следующим образом:
Передаточная функция изменения перегрузки самолета
Передаточная функция контура будет определяться следующим образом:
Передаточная функция изменения перегрузки самолета
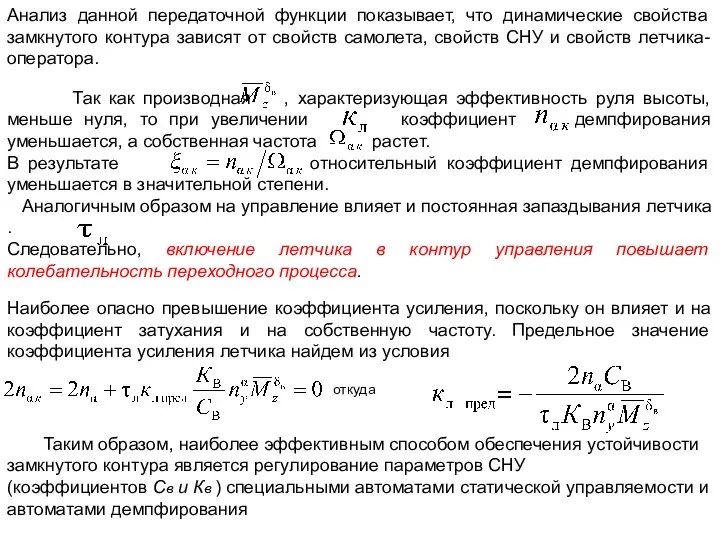
Анализ данной передаточной функции показывает, что динамические свойства замкнутого контура зависят
Анализ данной передаточной функции показывает, что динамические свойства замкнутого контура зависят
1.6. Возможные отказы системы неавтоматического управления
К наиболее часто встречающимся неисправностям СНУ
1.6. Возможные отказы системы неавтоматического управления
К наиболее часто встречающимся неисправностям СНУ

1.7. Электродистанционные системы управления
Переход к ЭДСУ обусловлен следующими обстоятельствами:
обеспечением необходимого
1.7. Электродистанционные системы управления
Переход к ЭДСУ обусловлен следующими обстоятельствами:
обеспечением необходимого

Пульт управления ЭДСУ
Пульт управления ЭДСУ

Конструкция механической части ЭДСУ
Рис. 1.9. Механические элементы ЭДСУ:
1 – тяга от
Конструкция механической части ЭДСУ
Рис. 1.9. Механические элементы ЭДСУ:
1 – тяга от
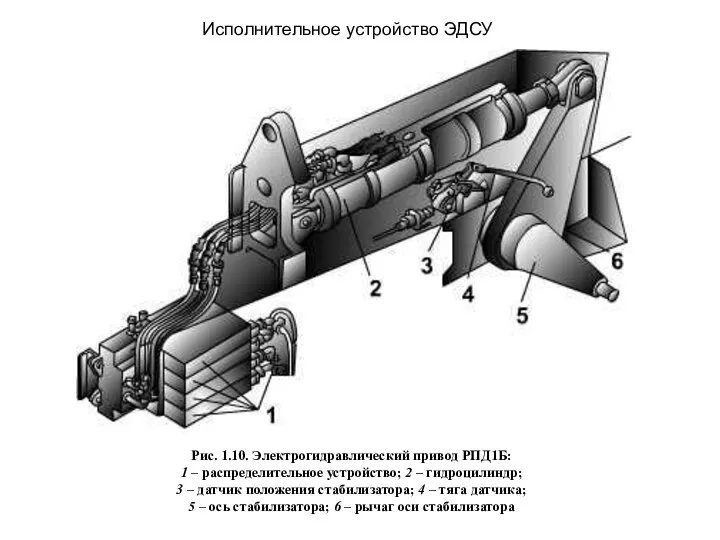
Исполнительное устройство ЭДСУ
Рис. 1.10. Электрогидравлический привод РПД1Б:
1 – распределительное устройство; 2
Исполнительное устройство ЭДСУ
Рис. 1.10. Электрогидравлический привод РПД1Б:
1 – распределительное устройство; 2
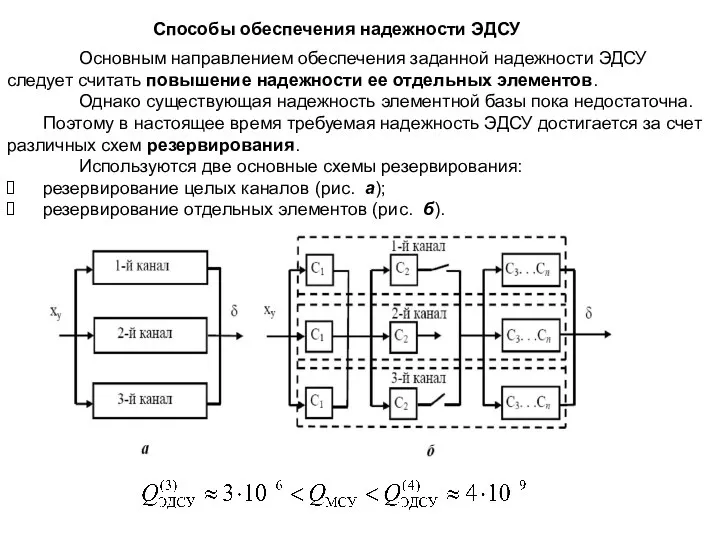
Способы обеспечения надежности ЭДСУ
Основным направлением обеспечения заданной надежности ЭДСУ следует считать
Способы обеспечения надежности ЭДСУ
Основным направлением обеспечения заданной надежности ЭДСУ следует считать
 Конденсатор. Электроёмкость
Конденсатор. Электроёмкость Реостаты. Работа реостата
Реостаты. Работа реостата Адиабатический процесс и цикл Карно
Адиабатический процесс и цикл Карно Динамика. Ньютон заңдары
Динамика. Ньютон заңдары Электростатика. Постоянный ток
Электростатика. Постоянный ток Аттестационная работа. Образовательная программа элективного курса. Математические методы в физике
Аттестационная работа. Образовательная программа элективного курса. Математические методы в физике Презентация по физике "Инерция. Плотность вещества" - скачать
Презентация по физике "Инерция. Плотность вещества" - скачать  Свободные и вынужденные колебания системы с бесконечным числом степеней свободы
Свободные и вынужденные колебания системы с бесконечным числом степеней свободы Линии влияния. Лекция 3. Расчёт сооружений на действие подвижных и других временных нагрузок
Линии влияния. Лекция 3. Расчёт сооружений на действие подвижных и других временных нагрузок Шкала, первый импульс и N-формация
Шкала, первый импульс и N-формация Проводники в электрическом поле. Диэлектрики в электрическом поле
Проводники в электрическом поле. Диэлектрики в электрическом поле Презентация по физике "Метод учебного проекта в преподавнии физики" -
Презентация по физике "Метод учебного проекта в преподавнии физики" -  Аттестационная работа. Создание образовательной программы элективного курса Статика. (9-10 класс)
Аттестационная работа. Создание образовательной программы элективного курса Статика. (9-10 класс) Задачи бионики
Задачи бионики Кинематика. Раздел теоретической механики, в котором изучается движение
Кинематика. Раздел теоретической механики, в котором изучается движение Виды зубчатых передач
Виды зубчатых передач Преобразователи с изменяющейся индуктивностью
Преобразователи с изменяющейся индуктивностью История развития электрического освещения
История развития электрического освещения Альберт Эйнштейн Я был третируем моими профессорами, которые не любили меня из-за моей независимости и закрыли мне путь в науку…
Альберт Эйнштейн Я был третируем моими профессорами, которые не любили меня из-за моей независимости и закрыли мне путь в науку… Магнитное поле (11 класс) - презентация_
Магнитное поле (11 класс) - презентация_ Электростатика. Работа поля над зарядом. Потенциал. Разность потенциалов
Электростатика. Работа поля над зарядом. Потенциал. Разность потенциалов Способы определения плотности твердого тела
Способы определения плотности твердого тела Влияние тепловых двигателей на окружающую среду
Влияние тепловых двигателей на окружающую среду Передача энергии посредством электромагнитной индукции
Передача энергии посредством электромагнитной индукции Неравновесные носители заряда в полупроводниках
Неравновесные носители заряда в полупроводниках Физика в боевых искусствах
Физика в боевых искусствах Оптический телескоп
Оптический телескоп Системы пожарной сигнализации и пожаротушения
Системы пожарной сигнализации и пожаротушения