- Изучение конструкции и исследование цилиндрическими редуктора зубчатыми колесами

Содержание
- 2. Изучение конструкции и исследование редуктора с цилиндрическими прямозубыми колесами, выполнение кинематического и силового расчетов, составление эскизов
- 3. Лабораторная работа проводится на препарированных механизмах. Кинематический механизм состоит из винтовой пары с трением скольжения и
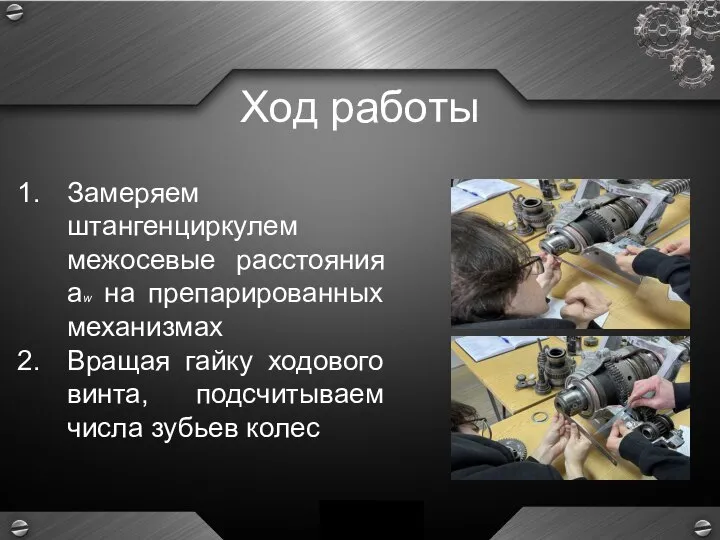
- 4. Ход работы Замеряем штангенциркулем межосевые расстояния аw на препарированных механизмах Вращая гайку ходового винта, подсчитываем числа
- 5. Определяем передаточное число – u для каждой ступени Вращая гайку ходового винта, подсчитываем числа зубьев колес
- 6. Вычисляем модуль зацепления m Из-за неточностей замера межосевого расстояния полученное значение модуля может отличаться от стандартного
- 7. Определяем диаметр делительной окружности - d Определяем диаметр окружности вершин – da Определяем диаметр окружности впадин
- 8. 10. Из-за неточностей замера межосевого расстояния полученное значение aw берем согласно таблице Исходя из таблицы aw
- 9. Измеряем ширину зубчатых колес – b Для 1 и 2 ступени b = 20 мм Определяем
- 10. Частоту вращения – n берем из таблицы, согласно варианту Вычисляем вращательный момент – Мк Вычисляем мощность
- 11. Результаты замеров и расчетов
- 12. Вывод Мы изучили конструкции и исследовали редуктор с цилиндрическими прямозубыми колесами, выполнили кинематический и силовой расчеты
- 14. Скачать презентацию
Изучение конструкции и исследование редуктора с цилиндрическими прямозубыми колесами, выполнение кинематического
Изучение конструкции и исследование редуктора с цилиндрическими прямозубыми колесами, выполнение кинематического

Лабораторная работа проводится на препарированных механизмах.
Кинематический механизм состоит из винтовой пары
Лабораторная работа проводится на препарированных механизмах.
Кинематический механизм состоит из винтовой пары
Ход работы
Замеряем штангенциркулем межосевые расстояния аw на препарированных механизмах
Вращая гайку
Ход работы
Замеряем штангенциркулем межосевые расстояния аw на препарированных механизмах
Вращая гайку
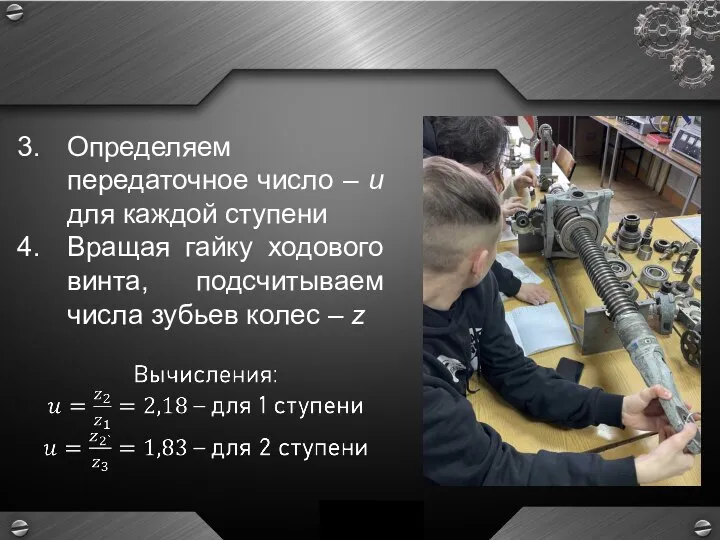
Определяем передаточное число – u для каждой ступени
Вращая гайку ходового винта,
Определяем передаточное число – u для каждой ступени
Вращая гайку ходового винта,
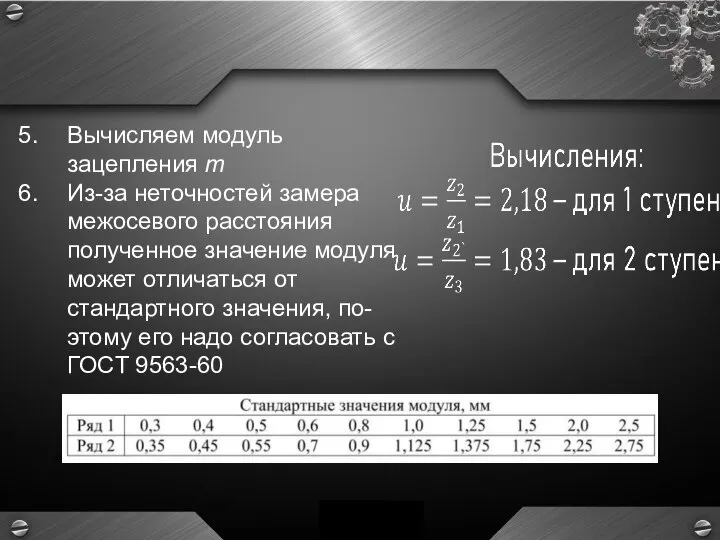
Вычисляем модуль зацепления m
Из-за неточностей замера межосевого расстояния полученное значение модуля
Вычисляем модуль зацепления m
Из-за неточностей замера межосевого расстояния полученное значение модуля
Определяем диаметр делительной окружности - d
Определяем диаметр окружности вершин – da
Определяем
Определяем диаметр делительной окружности - d
Определяем диаметр окружности вершин – da
Определяем
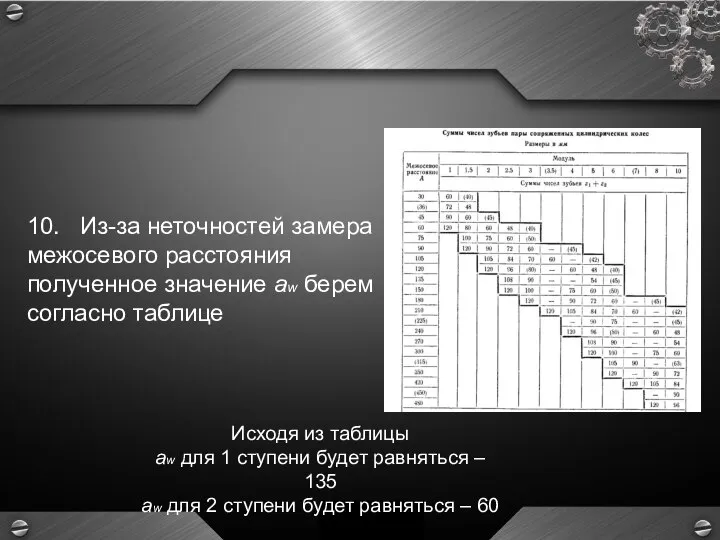
10. Из-за неточностей замера межосевого расстояния полученное значение aw берем согласно
10. Из-за неточностей замера межосевого расстояния полученное значение aw берем согласно
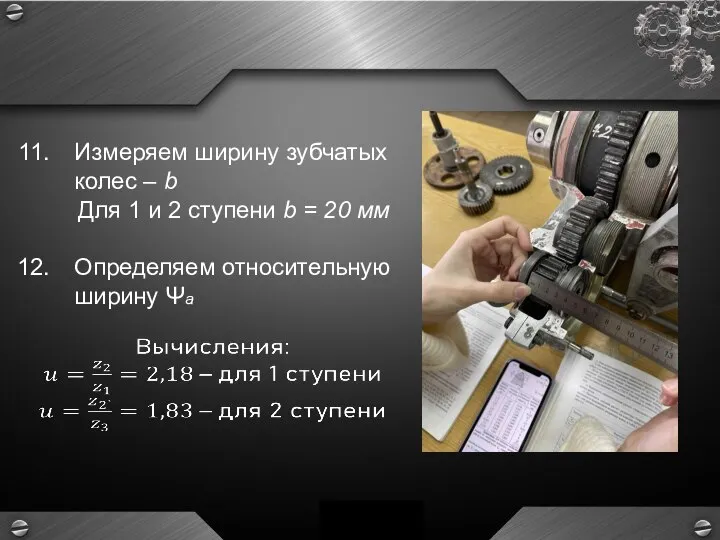
Измеряем ширину зубчатых колес – b
Для 1 и 2 ступени
Измеряем ширину зубчатых колес – b
Для 1 и 2 ступени
Частоту вращения – n берем из таблицы, согласно варианту
Вычисляем вращательный момент
Частоту вращения – n берем из таблицы, согласно варианту
Вычисляем вращательный момент

Результаты замеров и расчетов
Результаты замеров и расчетов

Вывод
Мы изучили конструкции и исследовали редуктор с цилиндрическими прямозубыми колесами, выполнили
Вывод
Мы изучили конструкции и исследовали редуктор с цилиндрическими прямозубыми колесами, выполнили
 Молекулярная физика и термодинамика Лекция 8
Молекулярная физика и термодинамика Лекция 8  Аттестационная работа. Методическая разработка по выполнению исследовательской работы «От чего зависит сила Архимеда?»
Аттестационная работа. Методическая разработка по выполнению исследовательской работы «От чего зависит сила Архимеда?» Магнитный поток. Решение задач
Магнитный поток. Решение задач Электролитическая диссоциация
Электролитическая диссоциация Свет в жизни человека
Свет в жизни человека Общие вопросы математического описания электромеханических систем
Общие вопросы математического описания электромеханических систем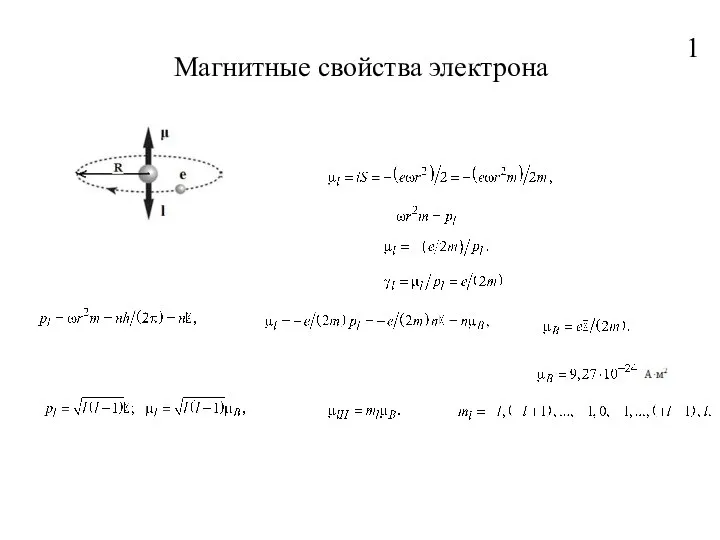 Магнитные свойства электрона
Магнитные свойства электрона Освещение жилого дома. Типы освещения
Освещение жилого дома. Типы освещения Составляющие магнитного поля
Составляющие магнитного поля Спектральные характеристики рентгеновского излучения
Спектральные характеристики рентгеновского излучения Презентация по физике "Ядерна зброя" - скачать бесплатно
Презентация по физике "Ядерна зброя" - скачать бесплатно Принципиальное устройство и работа двигателей внутреннего сгорания
Принципиальное устройство и работа двигателей внутреннего сгорания Последовательное и параллельное соединение резисторов. Решение задач
Последовательное и параллельное соединение резисторов. Решение задач Принцип работы ультразвуковых дефектоскопов
Принцип работы ультразвуковых дефектоскопов Как слышит ухо? (4)
Как слышит ухо? (4)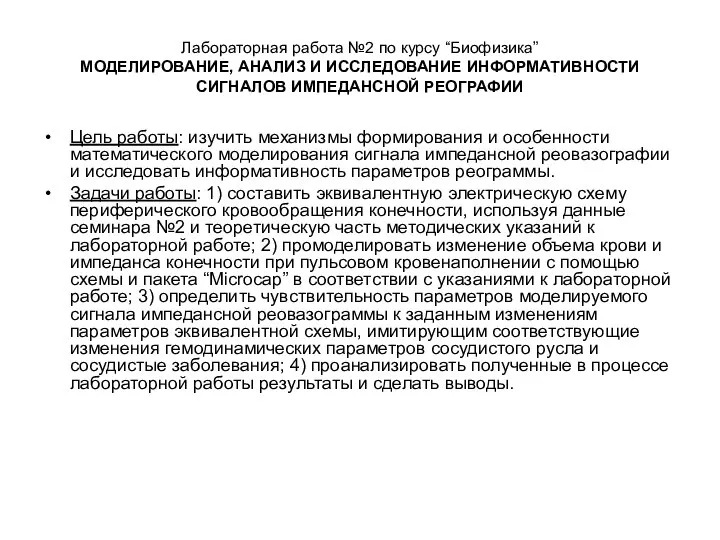 Моделирование, анализ и исследование информативности сигналов импедансной реографии
Моделирование, анализ и исследование информативности сигналов импедансной реографии Презентация по физике "Закон сохранения энергии в тепловых процессах" - скачать
Презентация по физике "Закон сохранения энергии в тепловых процессах" - скачать  Магнит өрісінің тогы бар өткізгішке әрекеті. Электрқозғалтқыштар. Электр өлшеуіш аспаптар
Магнит өрісінің тогы бар өткізгішке әрекеті. Электрқозғалтқыштар. Электр өлшеуіш аспаптар 10 интересных фактов о физике, которые заставят взглянуть на нее по-другому
10 интересных фактов о физике, которые заставят взглянуть на нее по-другому Детали механизмов и машин. Подшипники качения
Детали механизмов и машин. Подшипники качения Одноклапанный насос Руднев Леон 7-физический
Одноклапанный насос Руднев Леон 7-физический  Применение мультимедийных средств при подготовке к ЕГЭ и ГИА по физике
Применение мультимедийных средств при подготовке к ЕГЭ и ГИА по физике УЛЬТРАЗВУК И ИНФРАЗВУК Выполнил ученик 9г Смирнов Богдан
УЛЬТРАЗВУК И ИНФРАЗВУК Выполнил ученик 9г Смирнов Богдан Молекулярная физика
Молекулярная физика  Лазеры. Принцип действия
Лазеры. Принцип действия Температурные напряжения
Температурные напряжения Технологическая подготовка производства держателя измерителя для условий СНО Машиностроитель
Технологическая подготовка производства держателя измерителя для условий СНО Машиностроитель Курс «Основы вакуумной техники» Раздел «Экскурс в историю вакуумной техники: от эфира и технического вакуума до физического ваку
Курс «Основы вакуумной техники» Раздел «Экскурс в историю вакуумной техники: от эфира и технического вакуума до физического ваку