- Кинематика

Содержание
- 2. Кинематика Кинематика: Описание движения (но НЕ объяснение!) Материальная точка Координаты (x, y, z) С.О.= С.К. +
- 3. a Параллельные вектора = равные!. a a Some mathematics! Операции с векторами (1)
- 4. ax > 0 a X Y ay ax = |a|cos(αx) >0 ay = |a|cos(αy) αx αy>900
- 5. b = ka => k = |b| / |a| b = ka => k = -
- 6. c = a + b b = c - a = c + (- a) b
- 7. a = {ax, ay, az}; b = {bx, by, bz}; b а α Скалярное произведение: (a,
- 8. Система координат. Система отсчета Y X Z z(t) y(t) x(t) 0 чч:мм:сс t r(t) – радиус
- 9. Y X Z z(t) y(t) x(t) 0 чч:мм:сс r(t) – радиус - вектор Orts (ex, ey,
- 10. Relocation (Δr) X x(t) Δr S Путь S > | Δ r| Y X Z 0
- 11. Среднаяя скорость Δr / Δt = X x(t) Δr S Y X Z 0 чч:мм:сс r(t)
- 12. Y X Δr S r(t) Δr / Δt = V V - средняя скорость, но если
- 13. Y X z(t) y(t) x(t) x(t+Δt) Δr S r(t) r(t+Δt) Z 0 чч:мм:сс Vx = dX(t)/dt
- 14. X Δr S Y X Z 0 чч:мм:сс r(t0) r(t) V(t) Δx = x(t0)-x(t) = t
- 15. Vх t 0 : Δx = x(t0)-x(t) = t = Vx(t)dt t0 The same for y(t),
- 16. t 0 t S = |V(t)|dt t0 t0 t dS = |V(t)|dt t |V| Пройденный путь
- 17. V(t) V(t+Δt) V(t) V(t+Δt) V(t+Δt) - V(t) = ΔV Ускорение
- 18. V(t) V(t+Δt) x y W(t) = Wxex + Wyey + Wzez ex ey Wx = dVx(t)/dt
- 19. V(t) V(t+Δt) W(t) Wt(t) Wn(t) ΔV Нормальное и тангенциальное ускорения : Wt = d|V(t)|/dt Wt =
- 20. V(t) W(t) Wt(t) Wn(t) R Wn = V2/R Нормальное и тангенциальное ускорения
- 21. V(t) W(t) = g Wt(t) Wn(t) V0 x y V = V02 + (gt)2 R =
- 22. Угловая скорость: ω = dφ/dt [rad / s] = [s-1 ] V = dr/dt = Rdφ/dt
- 23. с = [a, b] a b α c перпендикулярен и a , и b с =
- 24. Угловое ускорение: β = dω/dt [rad/s2] = [s-2 ] Wt = βR Wt = [β, r]
- 26. Скачать презентацию
Кинематика
Кинематика: Описание движения (но НЕ объяснение!)
Материальная точка
Координаты (x, y, z)
С.О.= С.К.
Кинематика
Кинематика: Описание движения (но НЕ объяснение!)
Материальная точка
Координаты (x, y, z)
С.О.= С.К.
a
Параллельные вектора = равные!.
a
a
Some mathematics!
Операции с векторами (1)
a
Параллельные вектора = равные!.
a
a
Some mathematics!
Операции с векторами (1)
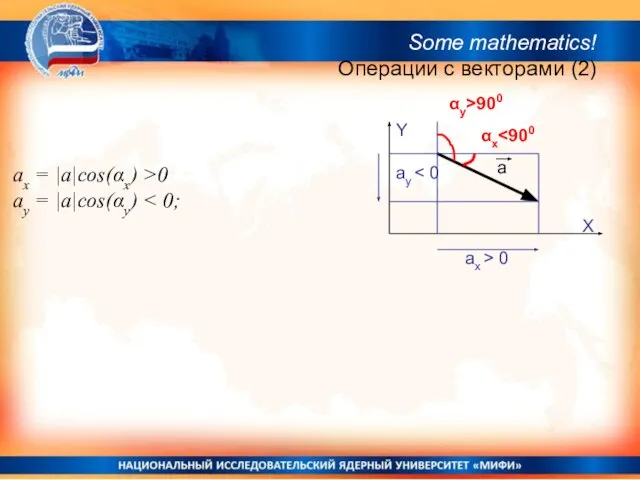
ax > 0
a
X
Y
ay < 0
ax = |a|cos(αx) >0
ay = |a|cos(αy)
ax > 0
a
X
Y
ay < 0
ax = |a|cos(αx) >0
ay = |a|cos(αy)
b = ka => k = |b| / |a|
b = ka
b = ka
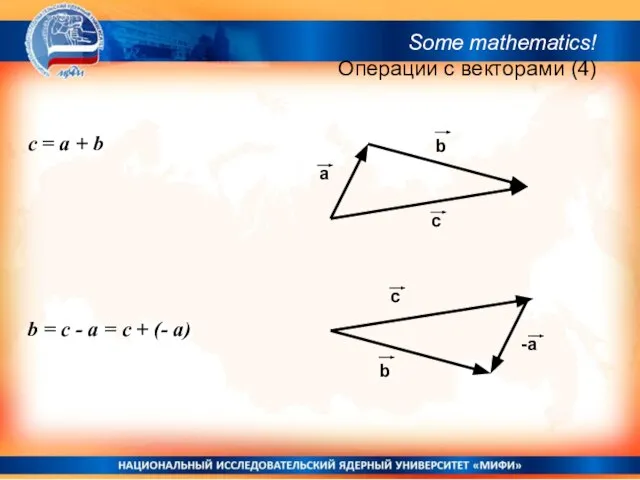
c = a + b
b = c - a = c
b = c - a = c
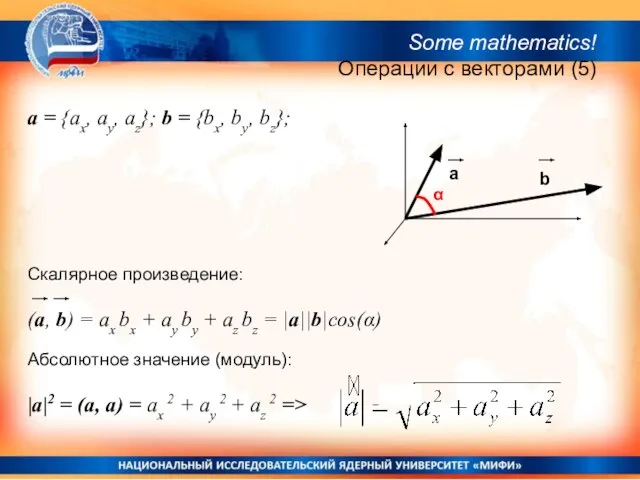
a = {ax, ay, az}; b = {bx, by, bz};
b
а
α
Скалярное
a = {ax, ay, az}; b = {bx, by, bz};
b
а
α
Скалярное
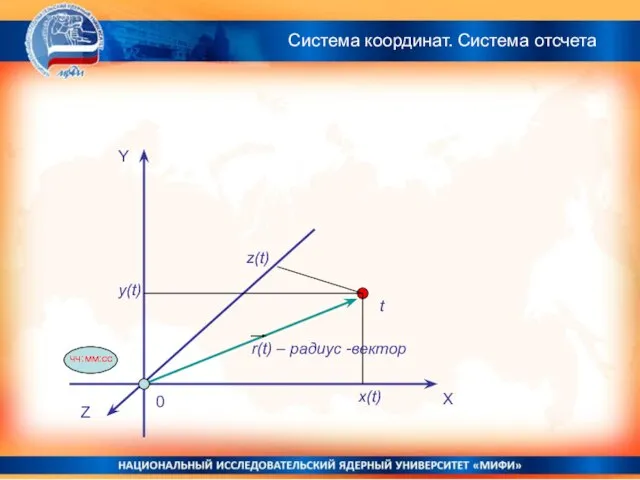
Система координат. Система отсчета
Y
X
Z
z(t)
y(t)
x(t)
0
чч:мм:сс
t
r(t) – радиус -вектор
Система координат. Система отсчета
Y
X
Z
z(t)
y(t)
x(t)
0
чч:мм:сс
t
r(t) – радиус -вектор
Y
X
Z
z(t)
y(t)
x(t)
0
чч:мм:сс
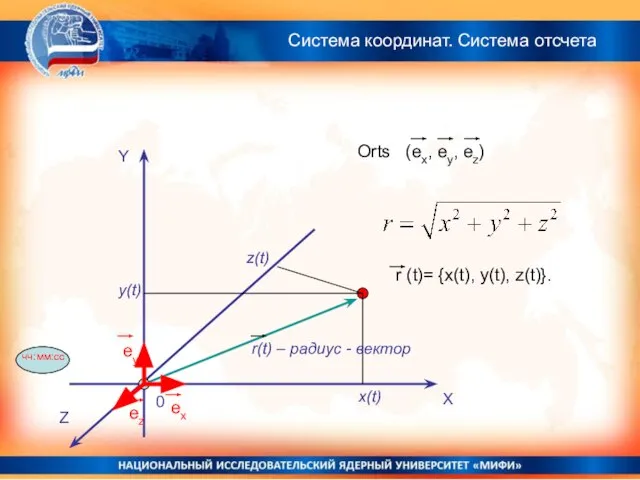
r(t) – радиус - вектор
Orts (ex, ey, ez)
ey
ex
ez
r (t)= {x(t),
Y
X
Z
z(t)
y(t)
x(t)
0
чч:мм:сс
r(t) – радиус - вектор
Orts (ex, ey, ez)
ey
ex
ez
r (t)= {x(t),
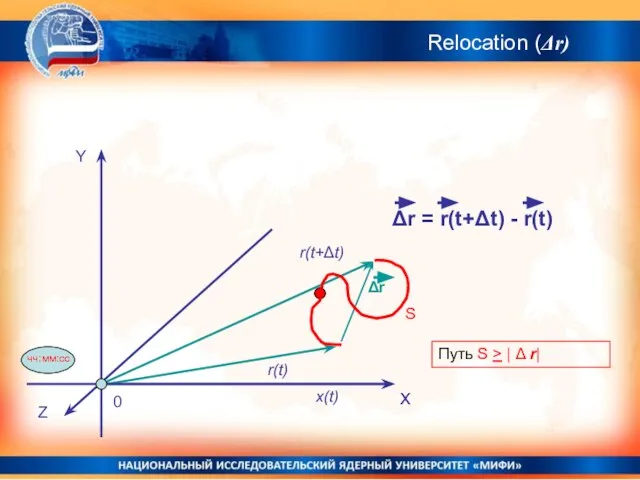
Relocation (Δr)
X
x(t)
Δr
S
Путь S > | Δ r|
Y
X
Z
0
чч:мм:сс
r(t)
Δr = r(t+Δt) -
Relocation (Δr)
X
x(t)
Δr
S
Путь S > | Δ r|
Y
X
Z
0
чч:мм:сс
r(t)
Δr = r(t+Δt) -
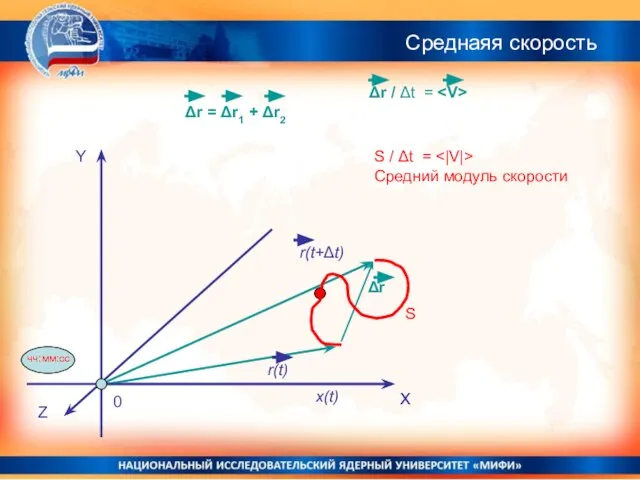
Среднаяя скорость
Δr / Δt =
X
x(t)
Δr
S
Y
X
Z
0
чч:мм:сс
r(t)
r(t+Δt)
Δr = Δr1 + Δr2
S /
Среднаяя скорость
Δr / Δt = X x(t) Δr S Y X Z 0 чч:мм:сс r(t) r(t+Δt) S /
Δr = Δr1 + Δr2

Y
X
Δr
S
r(t)
Δr / Δt = V
V - средняя скорость, но если
Y
X
Δr
S
r(t)
Δr / Δt = V
V - средняя скорость, но если
Y
X
z(t)
y(t)
x(t) x(t+Δt)
Δr
S
r(t)
r(t+Δt)
Z
0
чч:мм:сс
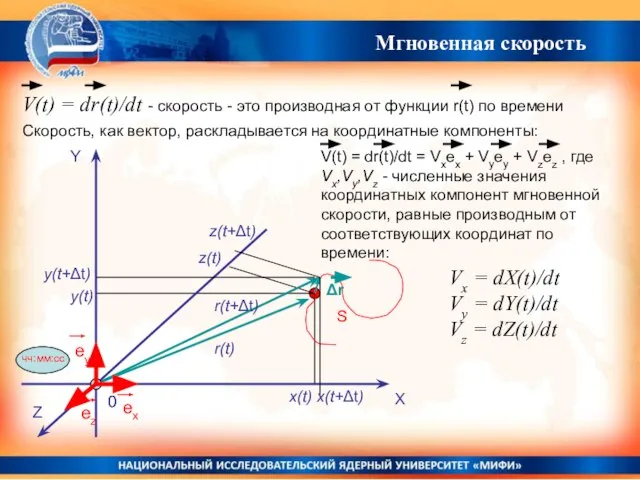
Vx = dX(t)/dt
Vy = dY(t)/dt
Vz = dZ(t)/dt
z(t+Δt)
y(t+Δt)
0
ey
ex
ez
V(t) = dr(t)/dt =
Y
X
z(t)
y(t)
x(t) x(t+Δt)
Δr
S
r(t)
r(t+Δt)
Z
0
чч:мм:сс
Vx = dX(t)/dt
Vy = dY(t)/dt
Vz = dZ(t)/dt
z(t+Δt)
y(t+Δt)
0
ey
ex
ez
V(t) = dr(t)/dt =
X
Δr
S
Y
X
Z
0
чч:мм:сс
r(t0)
r(t)
V(t)
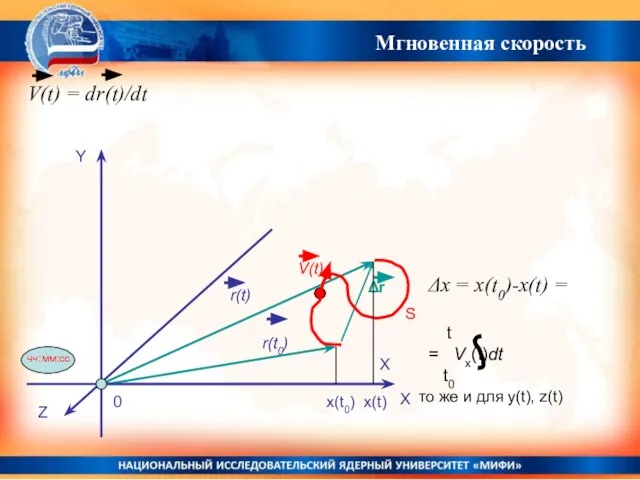
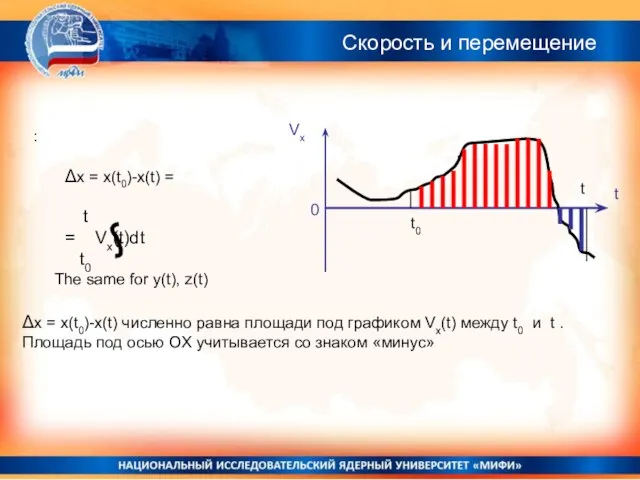
Δx = x(t0)-x(t) =
t
= Vx(t)dt
t0
то же и
X
Δr
S
Y
X
Z
0
чч:мм:сс
r(t0)
r(t)
V(t)
Δx = x(t0)-x(t) =
t
= Vx(t)dt
t0
то же и
Vх
t
0
:
Δx = x(t0)-x(t) =
t
= Vx(t)dt
t0
The same for
Vх
t
0
:
Δx = x(t0)-x(t) =
t
= Vx(t)dt
t0
The same for
t
0
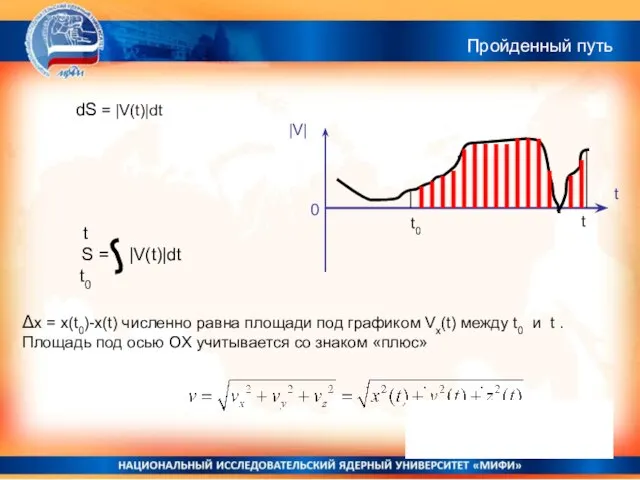
t
S = |V(t)|dt
t0
t0
t
dS = |V(t)|dt
t
|V|
Пройденный путь
Δx
t
0
t
S = |V(t)|dt
t0
t0
t
dS = |V(t)|dt
t
|V|
Пройденный путь
Δx

V(t)
V(t+Δt)
V(t)
V(t+Δt)
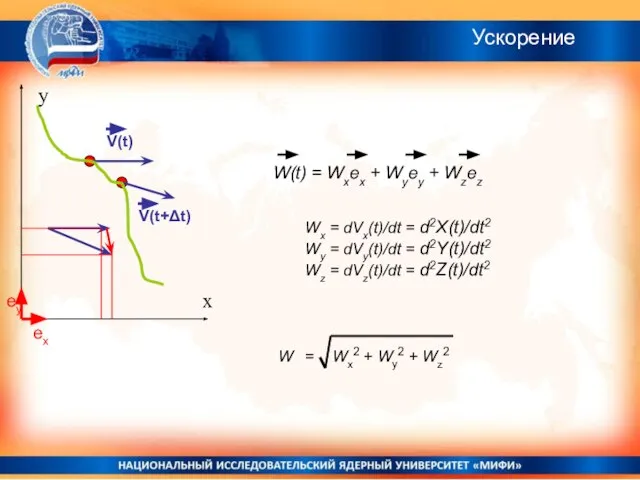
V(t+Δt) - V(t) = ΔV
Ускорение
V(t)
V(t+Δt)
V(t)
V(t+Δt)
V(t+Δt) - V(t) = ΔV
Ускорение
V(t)
V(t+Δt)
x
y
W(t) = Wxex + Wyey + Wzez
ex
ey
Wx = dVx(t)/dt =
V(t)
V(t+Δt)
x
y
W(t) = Wxex + Wyey + Wzez
ex
ey
Wx = dVx(t)/dt =
V(t)
V(t+Δt)
W(t)
Wt(t)
Wn(t)
ΔV
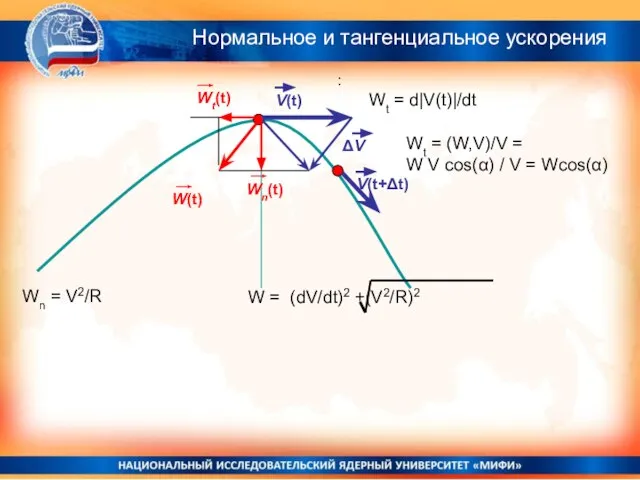
Нормальное и тангенциальное ускорения
:
Wt = d|V(t)|/dt
Wt = (W,V)/V =
W V
V(t)
V(t+Δt)
W(t)
Wt(t)
Wn(t)
ΔV
Нормальное и тангенциальное ускорения
:
Wt = d|V(t)|/dt
Wt = (W,V)/V =
W V
V(t)
W(t)
Wt(t)
Wn(t)
R
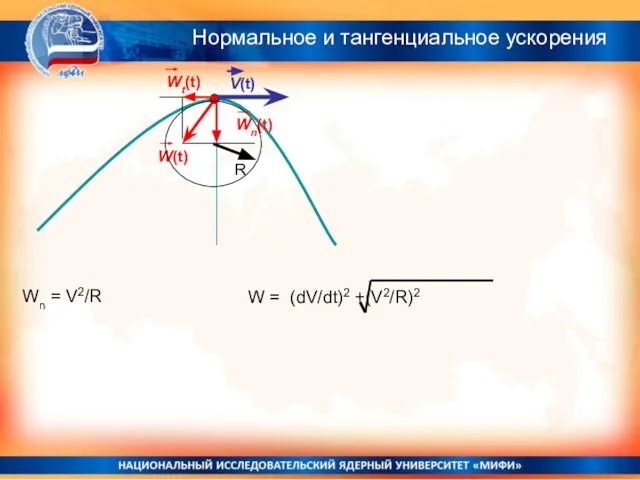
Wn = V2/R
Нормальное и тангенциальное ускорения
V(t)
W(t)
Wt(t)
Wn(t)
R
Wn = V2/R
Нормальное и тангенциальное ускорения
V(t)
W(t) = g
Wt(t)
Wn(t)
V0
x
y
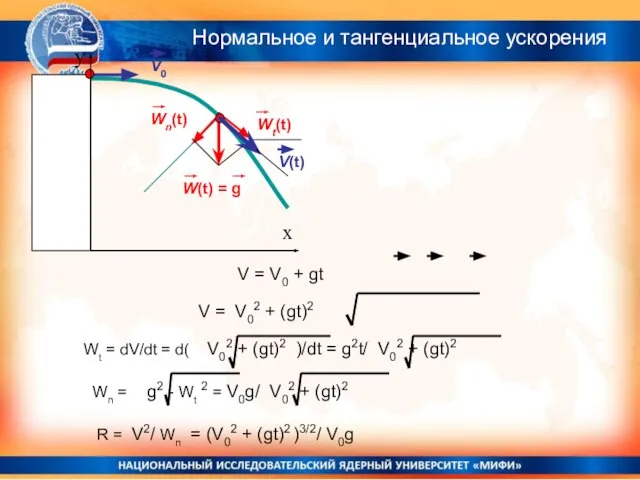
V = V02 + (gt)2
R = V2/
V(t)
W(t) = g
Wt(t)
Wn(t)
V0
x
y
V = V02 + (gt)2
R = V2/
![Угловая скорость: ω = dφ/dt [rad / s] = [s-1 ]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/615036/slide-21.jpg)
Угловая скорость:
ω = dφ/dt [rad / s] = [s-1 ]
V
Угловая скорость:
ω = dφ/dt [rad / s] = [s-1 ]
V
![с = [a, b] a b α c перпендикулярен и a](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/615036/slide-22.jpg)
с = [a, b]
a
b
α
c перпендикулярен и a , и b
с
a
b
α
c перпендикулярен и a , и b
с
![Угловое ускорение: β = dω/dt [rad/s2] = [s-2 ] Wt =](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/615036/slide-23.jpg)
Угловое ускорение:
β = dω/dt [rad/s2] = [s-2 ]
Wt = βR
Wt
Угловое ускорение:
β = dω/dt [rad/s2] = [s-2 ]
Wt = βR
Wt
 Паразитные эффекты в ИС при воздействии ИИ. Физика и особенности проявления тиристорных эффектов в КМОП ИС
Паразитные эффекты в ИС при воздействии ИИ. Физика и особенности проявления тиристорных эффектов в КМОП ИС Скалярное поле. Векторное поле
Скалярное поле. Векторное поле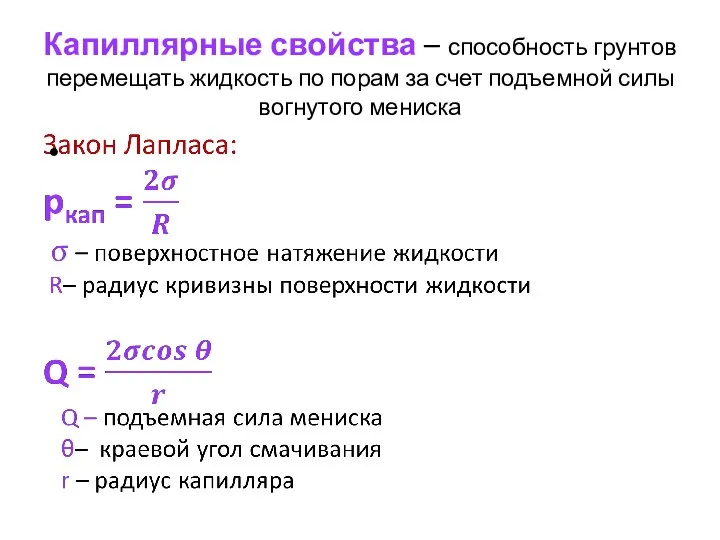 Капиллярные свойства
Капиллярные свойства Абрам Федорович Иоффе — создатель отечественной физической школы Презентация
Абрам Федорович Иоффе — создатель отечественной физической школы Презентация Nobel laureates
Nobel laureates Датчик числа оборотов G28
Датчик числа оборотов G28 Графическое представление тепловых процессов Т.И. Звягина, 2012 г. ГБОУ СОШ № 644 г. Санкт-Петербург
Графическое представление тепловых процессов Т.И. Звягина, 2012 г. ГБОУ СОШ № 644 г. Санкт-Петербург Закон Ома для однорідної ділянки кола
Закон Ома для однорідної ділянки кола Electromagnetic induction
Electromagnetic induction Раздел «Электричество»
Раздел «Электричество» Вычисление работы и мощности электрического тока
Вычисление работы и мощности электрического тока Презентация по физике "Техника эксперимента для микроволновой спектроскопии" - скачать бесплатно
Презентация по физике "Техника эксперимента для микроволновой спектроскопии" - скачать бесплатно Теплотехника. Термодинамические основы работы тепловых машин
Теплотехника. Термодинамические основы работы тепловых машин Физические основы термодинамики
Физические основы термодинамики Refrigeration Fundamentals. Part 1. Heat and Heat Transfer
Refrigeration Fundamentals. Part 1. Heat and Heat Transfer Мотор для электромобиля
Мотор для электромобиля Законы Ньютона
Законы Ньютона Основное оборудовние тепловых насосов
Основное оборудовние тепловых насосов Сила упругости. Закон Гука
Сила упругости. Закон Гука Основы трибологии
Основы трибологии Плоское потенциальное движение. Использование вихревой теории в расчетах турбомашин
Плоское потенциальное движение. Использование вихревой теории в расчетах турбомашин Термодинамика и теплопередача. Влажный воздух
Термодинамика и теплопередача. Влажный воздух Плотность. Пример оформления задач
Плотность. Пример оформления задач Презентация по физике "Оптика" - скачать бесплатно
Презентация по физике "Оптика" - скачать бесплатно Формирование личностных результатов обучения в контексте «субъект-субъектных» отношения в преподавании физики Выступление на з
Формирование личностных результатов обучения в контексте «субъект-субъектных» отношения в преподавании физики Выступление на з Электротехнические материалы
Электротехнические материалы Кристаллизация. Ликвация. Метод Бринелля. Метод Роквелла
Кристаллизация. Ликвация. Метод Бринелля. Метод Роквелла Физика – (греч . ta physika, от physis - природа), наука о природе. (Лекция 1)
Физика – (греч . ta physika, от physis - природа), наука о природе. (Лекция 1)