- Кинематика твердого тела. Плоское движение

Содержание
- 2. Определение плоского движения твердого тела Опр. Плоскопараллельным (плоским) называется такое движение твердого тела, при котором все
- 3. В качестве полюса может быть выбрана любая точка плоской фигуры. Опр. Произвольная точка А, выбранная для
- 4. Вывод. Кинематические характеристики плоского движения: скорость полюса, а также угловая скорость ω и угловое ускорение ε
- 5. а) через геометрическую сумму (с помощью полюса); Скорости точек тела при его плоском движении определяются тремя
- 6. Скорость любой точки плоской фигуры геометрически складывается из скорости какой-нибудь другой точки, принятой за полюс, и
- 7. Модуль и направление вектора скорости точки М определяется по формулам: VВ = VА Определения скоростей точек
- 8. Пример применения теоремы о проекциях скоростей 2 - х точек В плоском механизме, изображенном на рисунке,
- 9. или VВ = VА • cos(600 ) / cos(300) = /3м/с. По теореме о проекциях скоростей,
- 10. Понятие мгновенного центра скоростей (м.ц.с.) Определение. Мгновенным центром скоростей (м.ц.с.) называется точка плоской фигуры, скорость которой
- 11. Определение скоростей точек плоской фигуры с помощью м.ц.с. Пусть точка Р - м.ц.с. Примем ее за
- 12. Вывод 3). Скорости точек плоской фигуры пропорциональны их расстояниям от м.ц.с., то есть Вывод 4). Угловая
- 13. Случаи построения м.ц.с. 1). Общий случай. Для определения м.ц.с. необходимо знать только направление скоростей двух точек
- 14. б) Случай мгновенно поступательного движения тела. В этом случае скорости точек А и В плоской фигуры
- 15. в) Случай, когда скорости точек плоской фигуры А и В параллельны друг другу, направлены в одну
- 16. Пример1 кинематического анализа плоского механизма При заданных значениях: ОА = 4 м, АК = 2 м,
- 17. 2. Определение кинематических характеристик точек и тел, принадлежащих механизму. Определение необходимо начинать со звена механизма, для
- 18. Вектор скорости точки А направлен по касательной к ее траектории, т.е. перпендикулярно к звену ОА в
- 19. Скорость точки К направлена параллельно горизонтальной плоскости. М.ц.с. звена АК находится в точке РАК . Плоская
- 20. Откуда найдем VК = VА . соs(300) = 8 . 0,865 = 6,92 м/с. с-1. в)
- 21. Откуда получим: VС = VК . Угловая скорость диска Д ωД направлена по ходу часовой стрелки,
- 22. сходит со ступенчатого шкива В в точке Е, а верхний Пример2 кинематического анализа плоского механизма Нить
- 23. Решение. - тела С и Д движутся также поступательно; 1. Определим вид движения каждого тела, входящего
- 24. Так как нить 1 движется поступательно, то а) Рассмотрим тело С, движущееся поступательно. Определим скорость тела
- 25. в) Рассмотрим ступенчатый блок В. Точка Е является общей для нити 1 и блока В, поэтому
- 26. г) Рассмотрим нить 2. Скорость точки L по модулю и по направлению будет совпадать со скоростью
- 27. Зная скорость VL и м.ц.с. шкива А, можно определить скорости других его точек. М.ц.с. шкива А
- 28. Вектор скорости точки М направлен перпендикулярно к отрезку МР, соединяющему точку М и м.ц.с., в сторону
- 29. Пример 3 кинематического анализа плоского механизма На плоский двухзвенный механизм (конструкция) АКДЕ, звенья которого АД и
- 30. 1. Определим виды движения тел, входящих в механизм. Решение. - звено АД движется поступательно, так как
- 32. Скачать презентацию
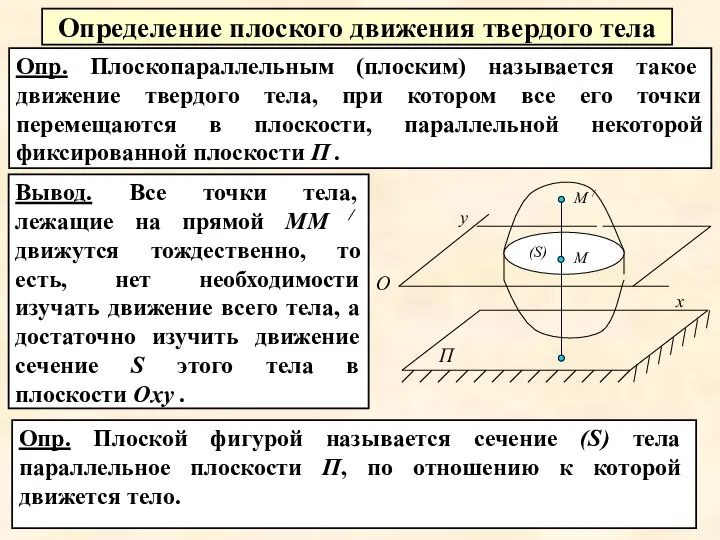
Определение плоского движения твердого тела
Опр. Плоскопараллельным (плоским) называется такое движение твердого
Определение плоского движения твердого тела
Опр. Плоскопараллельным (плоским) называется такое движение твердого
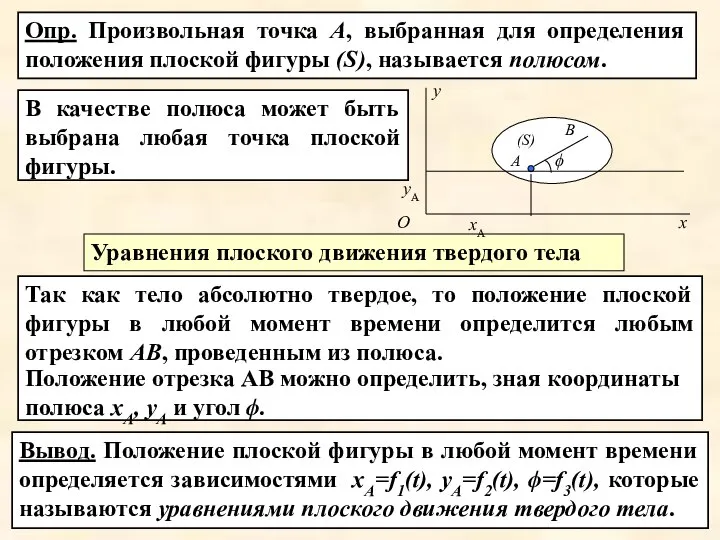
В качестве полюса может быть выбрана любая точка плоской фигуры.
Опр.
В качестве полюса может быть выбрана любая точка плоской фигуры.
Опр.
Вывод. Кинематические характеристики плоского движения: скорость
полюса, а также угловая скорость ω
полюса, а также угловая скорость ω
а) через геометрическую сумму (с помощью полюса);
Скорости точек тела при
а) через геометрическую сумму (с помощью полюса);
Скорости точек тела при
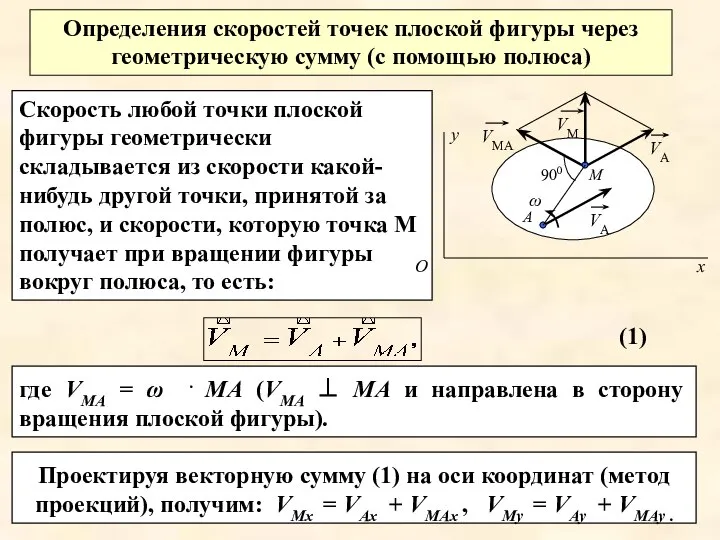
Скорость любой точки плоской фигуры геометрически складывается из скорости какой-нибудь другой
Скорость любой точки плоской фигуры геометрически складывается из скорости какой-нибудь другой
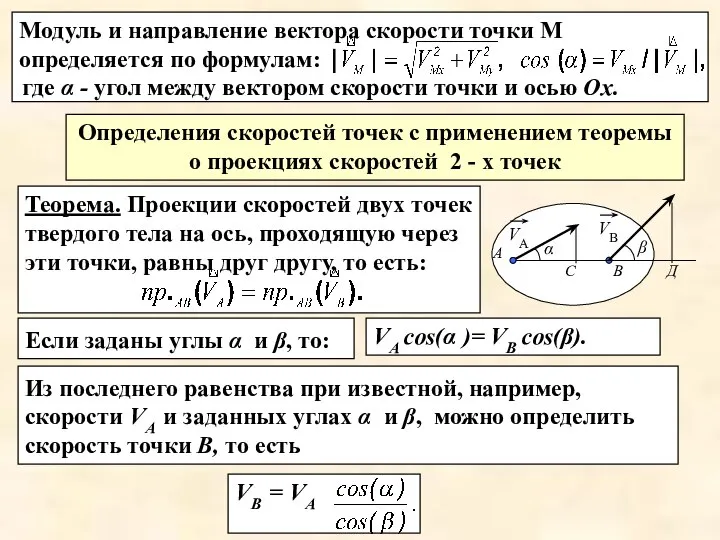
Модуль и направление вектора скорости точки М определяется по формулам:
VВ =
Модуль и направление вектора скорости точки М определяется по формулам:
VВ =
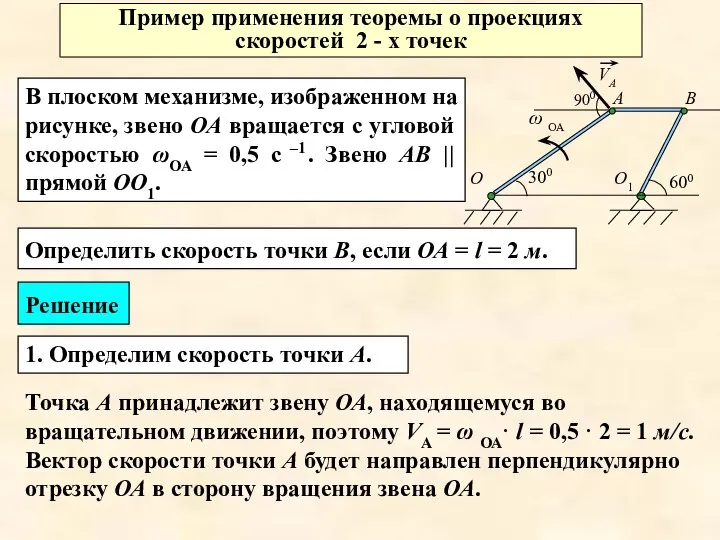
Пример применения теоремы о проекциях скоростей 2 - х точек
В плоском
Пример применения теоремы о проекциях скоростей 2 - х точек
В плоском
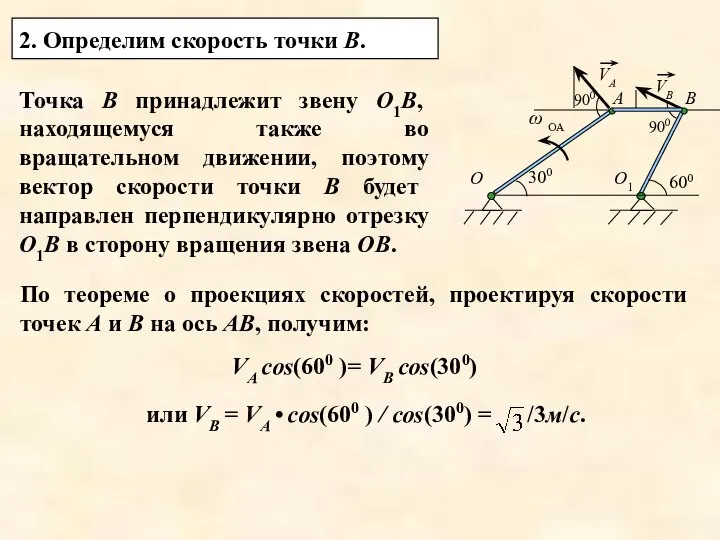
или VВ = VА • cos(600 ) / cos(300) = /3м/с.
По
или VВ = VА • cos(600 ) / cos(300) = /3м/с.
По
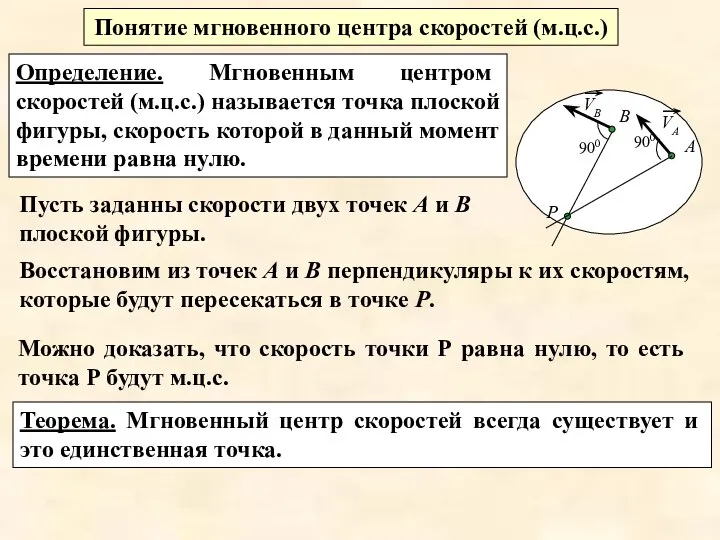
Понятие мгновенного центра скоростей (м.ц.с.)
Определение. Мгновенным центром скоростей (м.ц.с.) называется
Понятие мгновенного центра скоростей (м.ц.с.)
Определение. Мгновенным центром скоростей (м.ц.с.) называется
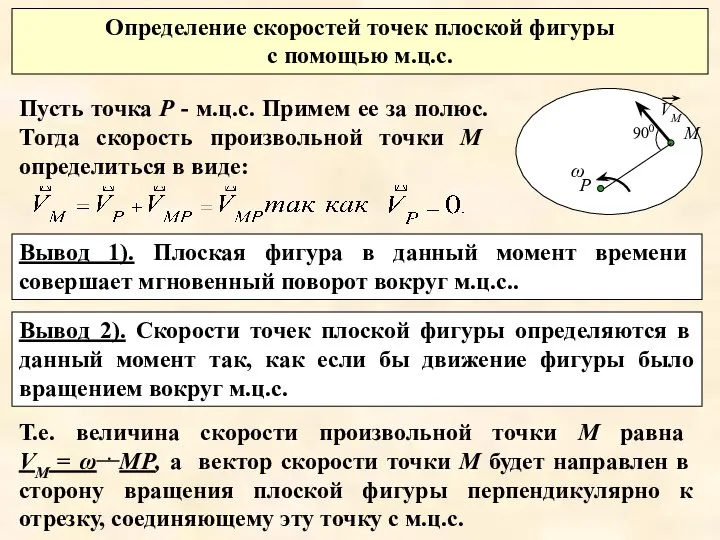
Определение скоростей точек плоской фигуры
с помощью м.ц.с.
Пусть точка Р -
Определение скоростей точек плоской фигуры
с помощью м.ц.с.
Пусть точка Р -
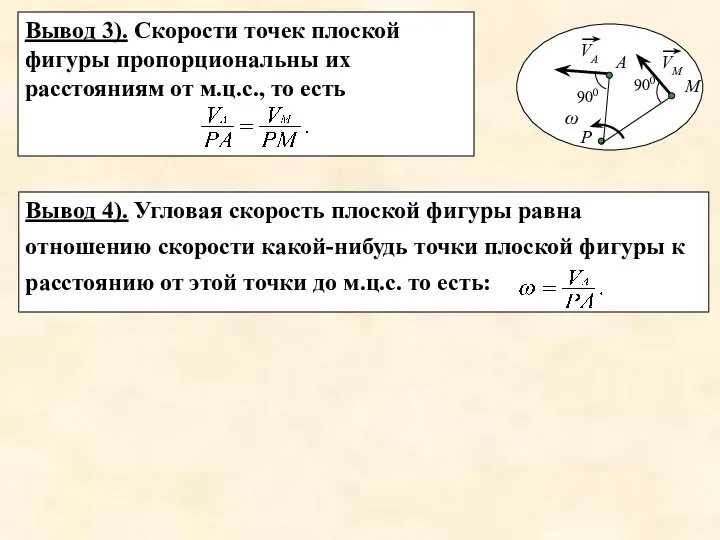
Вывод 3). Скорости точек плоской фигуры пропорциональны их расстояниям от м.ц.с.,
Вывод 3). Скорости точек плоской фигуры пропорциональны их расстояниям от м.ц.с.,
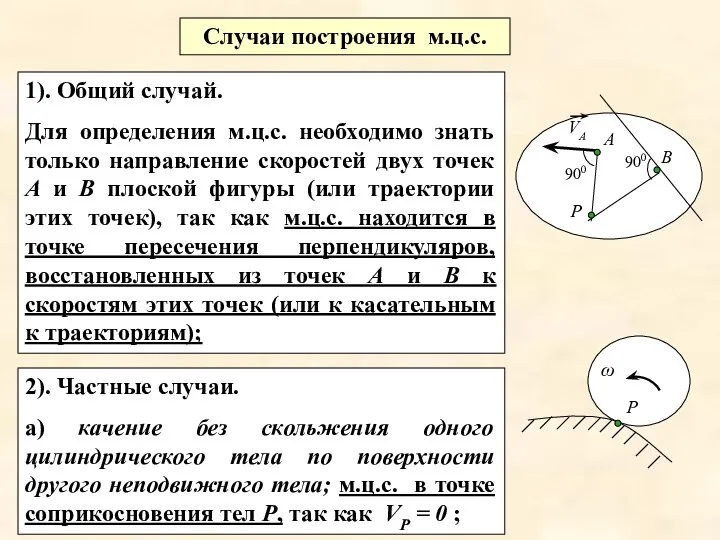
Случаи построения м.ц.с.
1). Общий случай.
Для определения м.ц.с. необходимо знать только
Случаи построения м.ц.с.
1). Общий случай.
Для определения м.ц.с. необходимо знать только
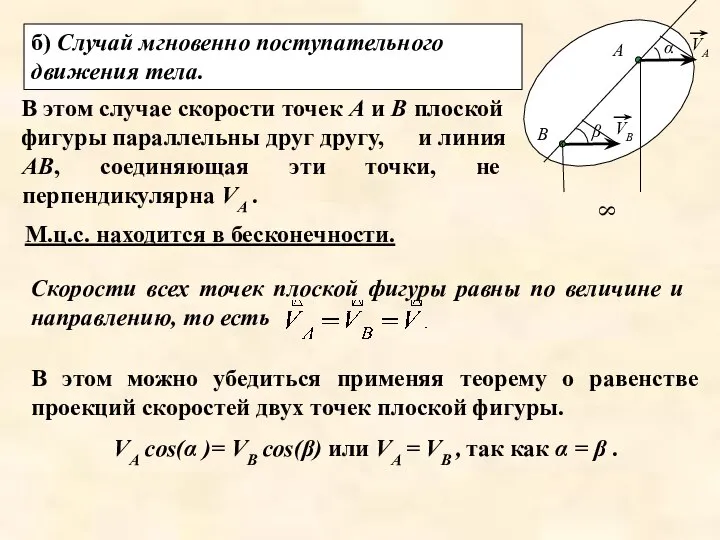
б) Случай мгновенно поступательного движения тела.
В этом случае скорости точек А
б) Случай мгновенно поступательного движения тела.
В этом случае скорости точек А
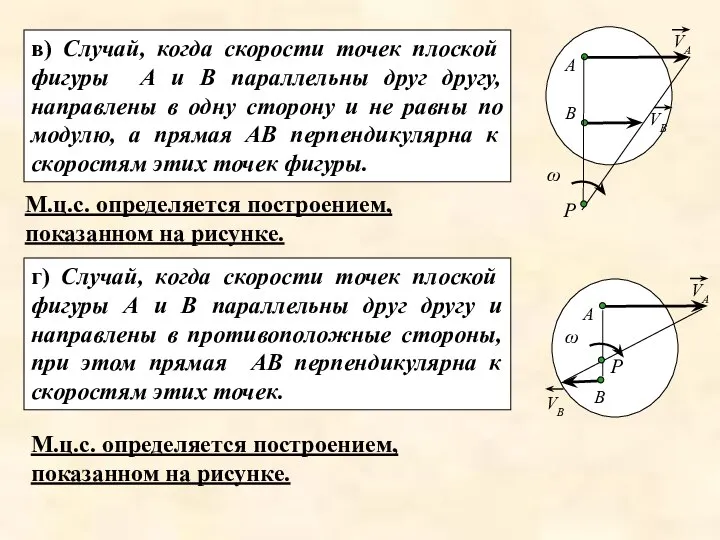
в) Случай, когда скорости точек плоской фигуры А и В параллельны
в) Случай, когда скорости точек плоской фигуры А и В параллельны
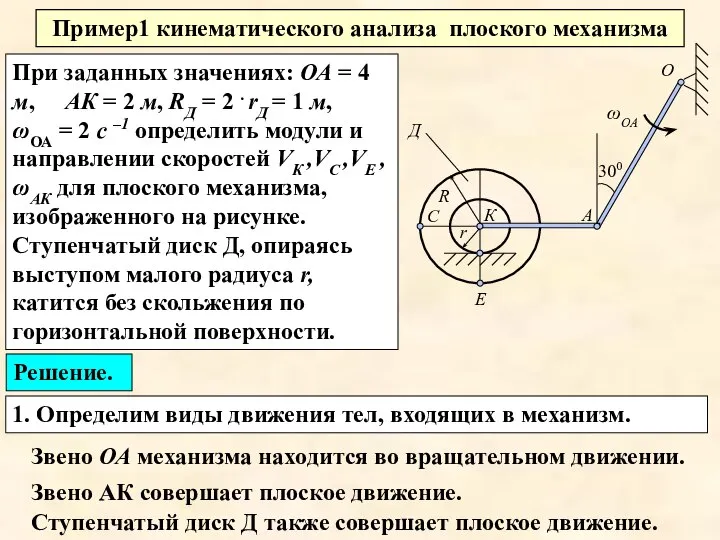
Пример1 кинематического анализа плоского механизма
При заданных значениях: ОА = 4
Пример1 кинематического анализа плоского механизма
При заданных значениях: ОА = 4
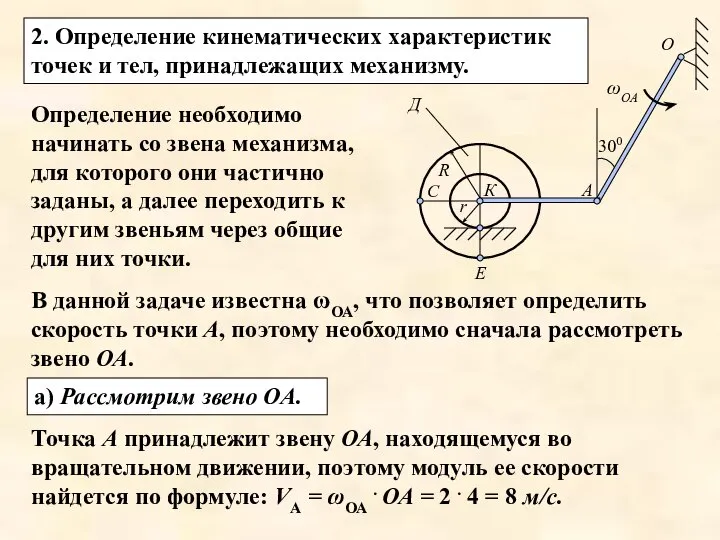
2. Определение кинематических характеристик точек и тел, принадлежащих механизму.
Определение необходимо
2. Определение кинематических характеристик точек и тел, принадлежащих механизму.
Определение необходимо
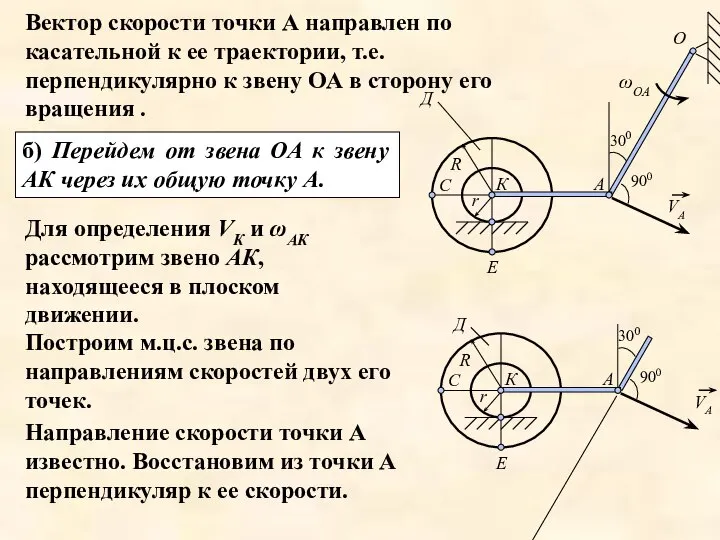
Вектор скорости точки А направлен по касательной к ее траектории, т.е.
Вектор скорости точки А направлен по касательной к ее траектории, т.е.
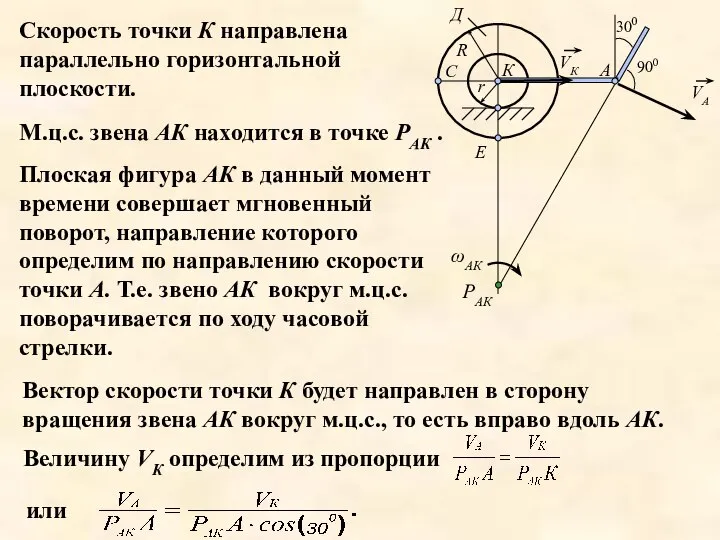
Скорость точки К направлена параллельно горизонтальной плоскости.
М.ц.с. звена АК находится в
Скорость точки К направлена параллельно горизонтальной плоскости.
М.ц.с. звена АК находится в
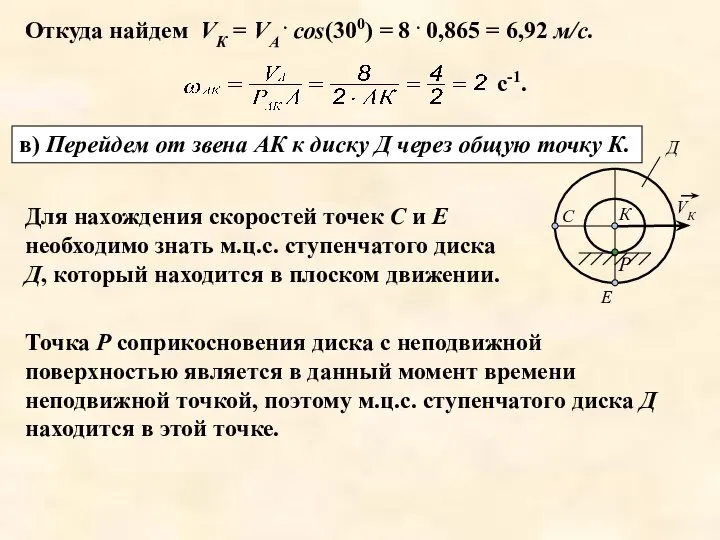
Откуда найдем VК = VА . соs(300) = 8 . 0,865
Откуда найдем VК = VА . соs(300) = 8 . 0,865
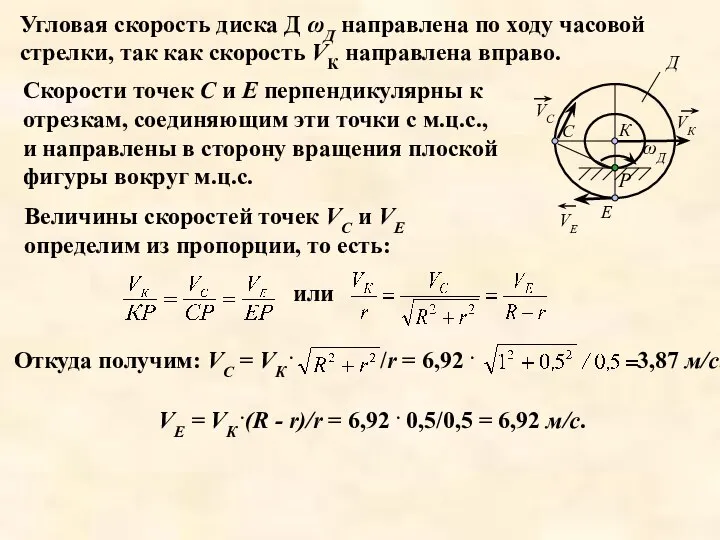
Откуда получим: VС = VК .
Угловая скорость диска Д ωД
Откуда получим: VС = VК .
Угловая скорость диска Д ωД
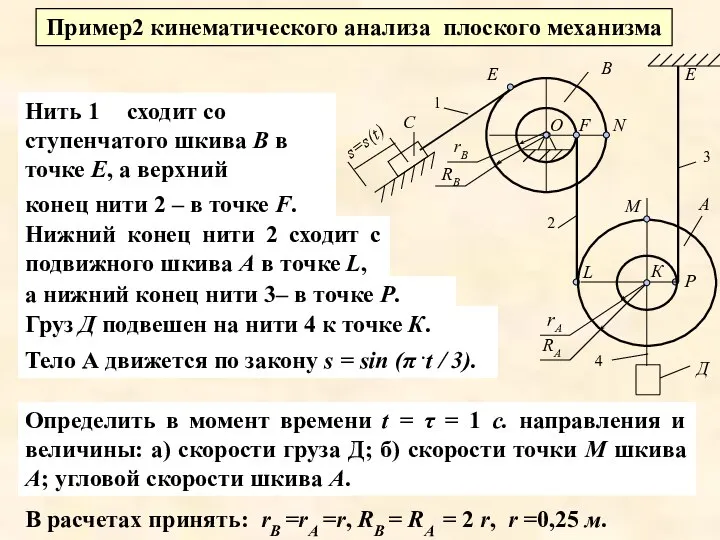
сходит со ступенчатого шкива В в точке Е, а верхний
Пример2
сходит со ступенчатого шкива В в точке Е, а верхний
Пример2
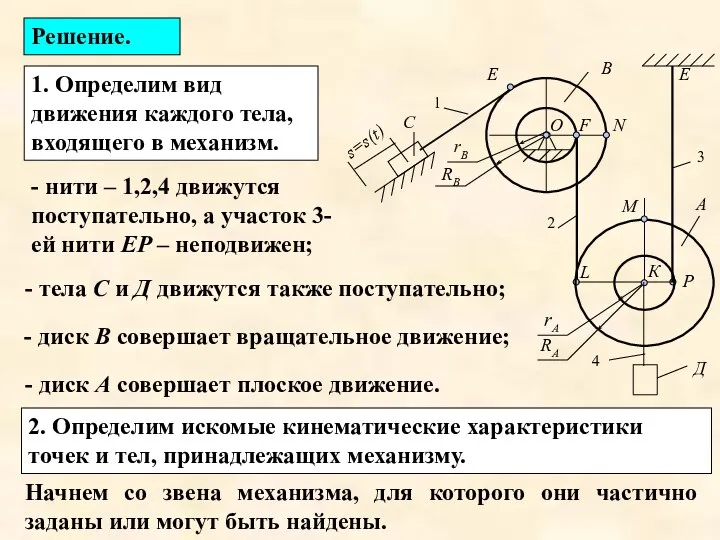
Решение.
- тела С и Д движутся также поступательно;
1. Определим вид
Решение.
- тела С и Д движутся также поступательно;
1. Определим вид
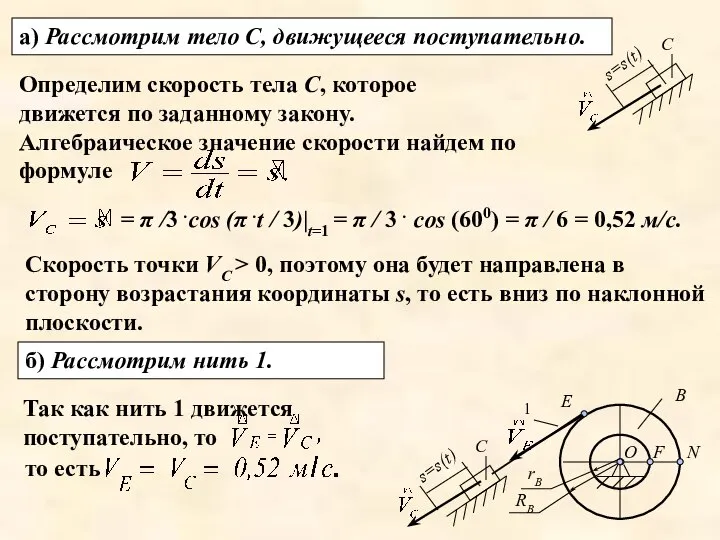
Так как нить 1 движется поступательно, то
а) Рассмотрим тело С,
Так как нить 1 движется поступательно, то
а) Рассмотрим тело С,
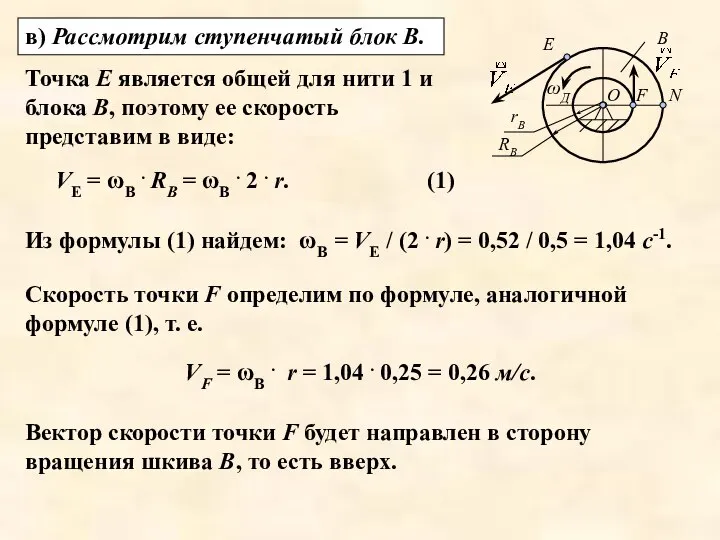
в) Рассмотрим ступенчатый блок В.
Точка Е является общей для нити 1
в) Рассмотрим ступенчатый блок В.
Точка Е является общей для нити 1
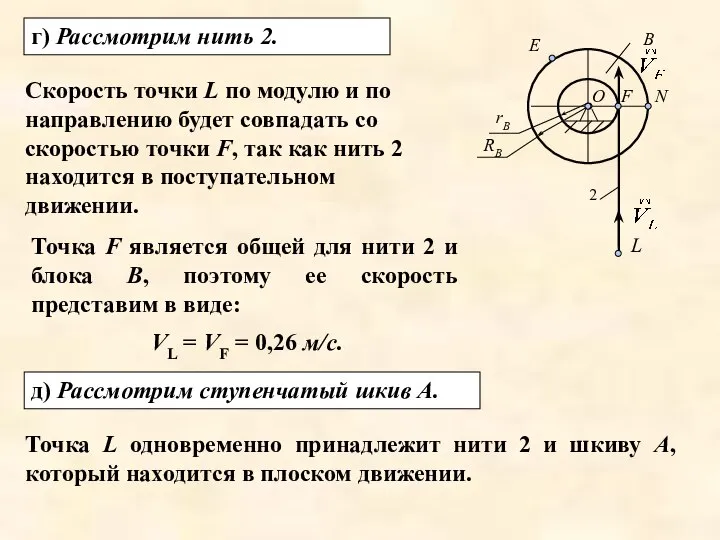
г) Рассмотрим нить 2.
Скорость точки L по модулю и по
г) Рассмотрим нить 2.
Скорость точки L по модулю и по
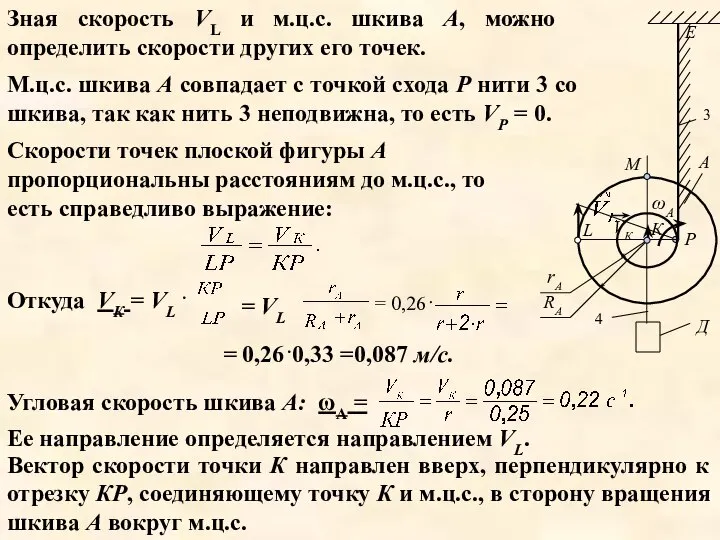
Зная скорость VL и м.ц.с. шкива А, можно определить скорости других
Зная скорость VL и м.ц.с. шкива А, можно определить скорости других
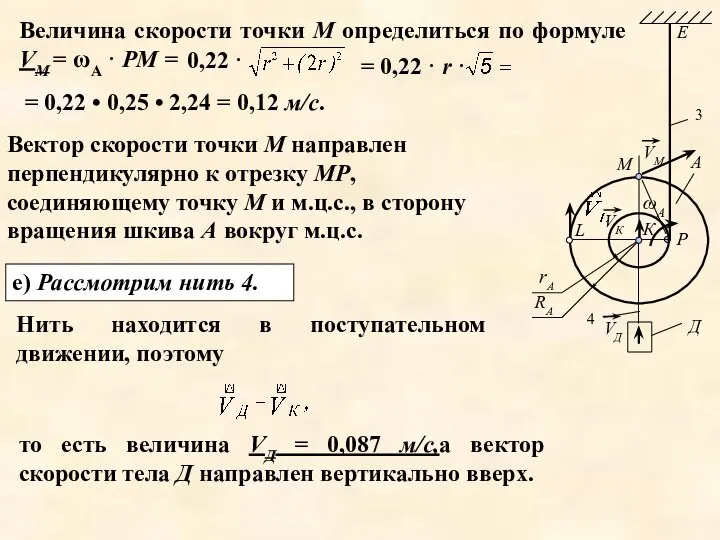
Вектор скорости точки М направлен перпендикулярно к отрезку МР, соединяющему точку
Вектор скорости точки М направлен перпендикулярно к отрезку МР, соединяющему точку
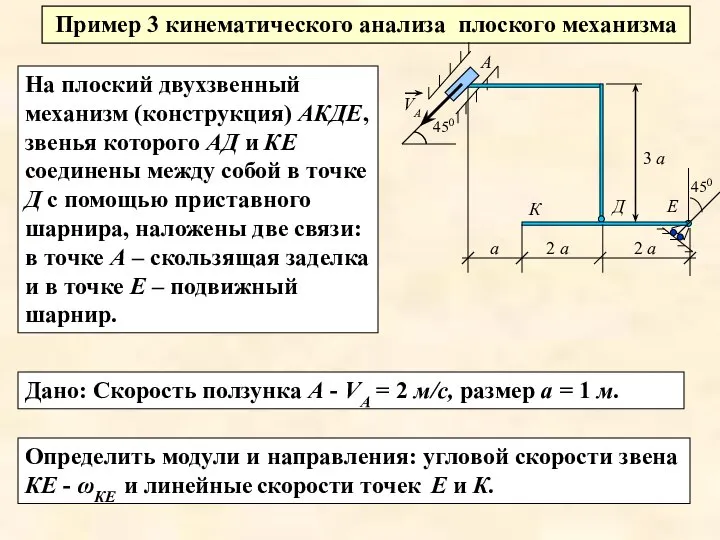
Пример 3 кинематического анализа плоского механизма
На плоский двухзвенный механизм (конструкция)
Пример 3 кинематического анализа плоского механизма
На плоский двухзвенный механизм (конструкция)
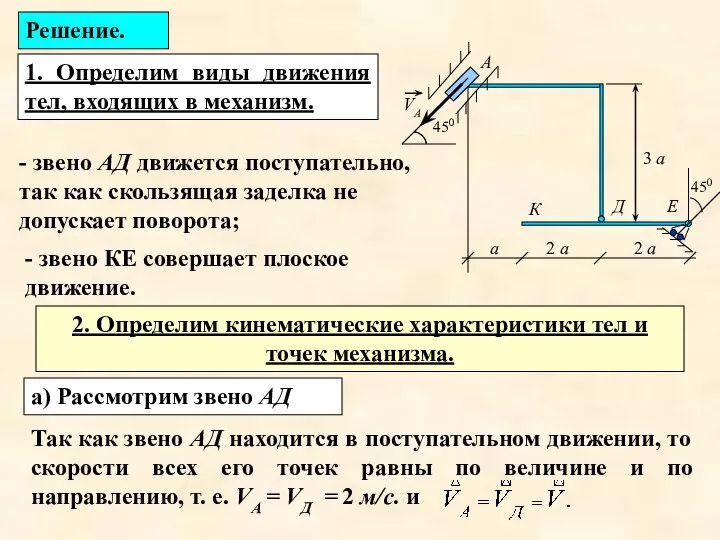
1. Определим виды движения тел, входящих в механизм.
Решение.
- звено АД
1. Определим виды движения тел, входящих в механизм.
Решение.
- звено АД
 Строение жидких, твердых и газообразных тел с точки зрения молекулярнокинетической теории
Строение жидких, твердых и газообразных тел с точки зрения молекулярнокинетической теории Общие моменты по WP7
Общие моменты по WP7 Силы, стабилизирующие пространственную структуру макромолекул. Вязкость растворов макромолекул
Силы, стабилизирующие пространственную структуру макромолекул. Вязкость растворов макромолекул Строение атома
Строение атома Телефонная связь
Телефонная связь Современные инструментальные методы химического анализа. Часть 2. Хроматография, масс-спектрометрия, термоанализ
Современные инструментальные методы химического анализа. Часть 2. Хроматография, масс-спектрометрия, термоанализ Применение законов физики в повседневной жизни
Применение законов физики в повседневной жизни Библиотека физических задач (на тепловые явления)
Библиотека физических задач (на тепловые явления) Особенности наземной эксплуатации ракет космического назначения. Лекция 4
Особенности наземной эксплуатации ракет космического назначения. Лекция 4 Основы медицинской акустики
Основы медицинской акустики Презентация по теме: «Маятник» Выполнила Юнченко Татьяна
Презентация по теме: «Маятник» Выполнила Юнченко Татьяна Шаблон презентации по микро- и нанодиагностике
Шаблон презентации по микро- и нанодиагностике Рівномірний рух по колу
Рівномірний рух по колу Ускорение свободного падения и вес тела на Земле и других планетах
Ускорение свободного падения и вес тела на Земле и других планетах Тиристор. Общая характеристика оптоэлектронных приборов
Тиристор. Общая характеристика оптоэлектронных приборов Методические указания к лабораторным работам по разделу Колебания и волны
Методические указания к лабораторным работам по разделу Колебания и волны Опиливание заготовок из металла и пластмассы (6 класс)
Опиливание заготовок из металла и пластмассы (6 класс) Кванттық физиканың даму тарихы және тарихи деректерді физика пәнін оқытуда қолдану
Кванттық физиканың даму тарихы және тарихи деректерді физика пәнін оқытуда қолдану Работа, энергия и мощность
Работа, энергия и мощность Superconductivity
Superconductivity Адсорбция үдерісі
Адсорбция үдерісі Лауреаты Нобелевской премии
Лауреаты Нобелевской премии Модели атомов. Опыты Резерфорда
Модели атомов. Опыты Резерфорда Последовательное и параллельное соединение конденсаторов
Последовательное и параллельное соединение конденсаторов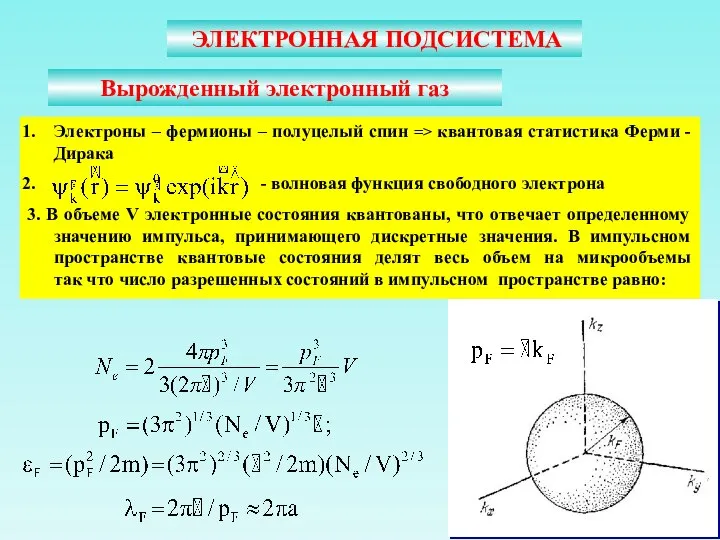 Электронная подсистема. Вырожденный электронный газ (лекция 16)
Электронная подсистема. Вырожденный электронный газ (лекция 16)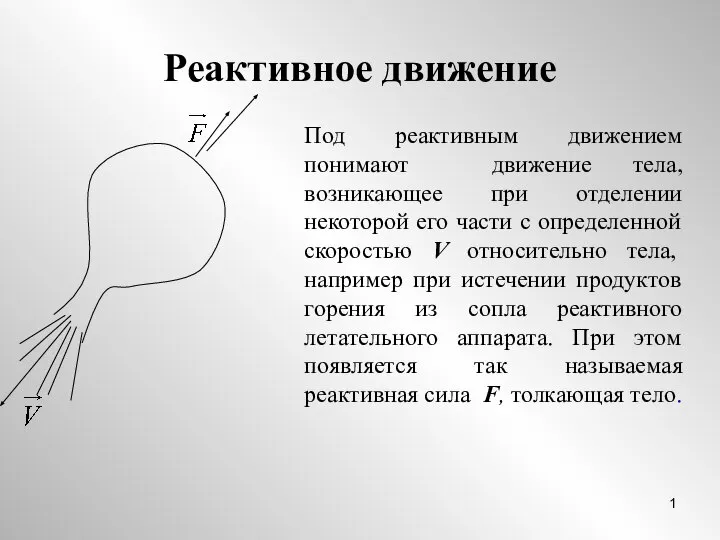 Реактивное движение
Реактивное движение Термодинамические процессы с идеальным газом
Термодинамические процессы с идеальным газом Как устроен атом
Как устроен атом