- Колебания систем с одной степенью свободы

Содержание
- 2. Часто в реальной конструкции можно выделить массивные элементы, деформацией которых можно пренебречь, и упругие элементы, массу
- 3. На рис. 2 представлены системы с двумя степенями свободы. Положение грузов (рис.2,а), масса которых значительно больше
- 4. Системы, изображенные на рис.2, б, в, могут рассматриваться как системы с двумя степенями свободы, если собственные
- 5. Определение собственной частоты системы с одной степенью свободы 1. Записать кинетическую и потенциальную энергию системы соответственно
- 6. 6. Определить собственную частоту колебаний Если ввести f = k -1 - единичную податливость, соответствующую квазиупругому
- 7. Пример 3.1. Рассмотрим систему с одной степенью свободы: автомобиль массой m и жесткостью пружин подвески k
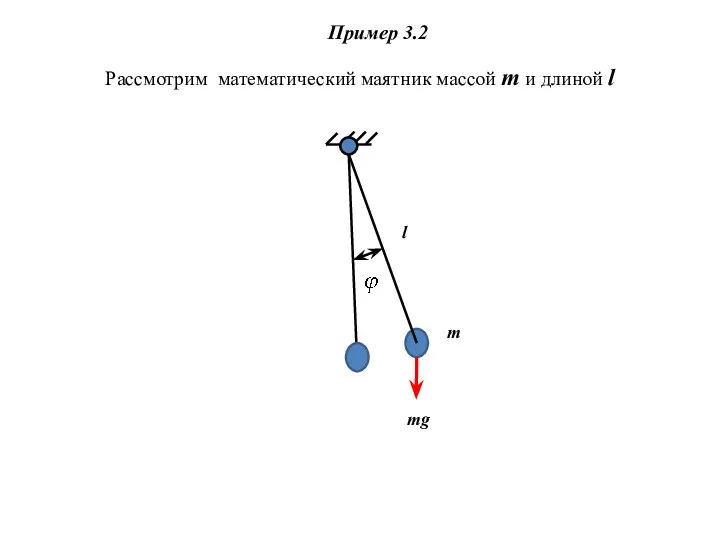
- 8. Пример 3.2 Рассмотрим математический маятник массой m и длиной l l m mg
- 9. Математический маятник Фуко в Национальном соборе г. Мехико
- 10. 1. Кинетическая и потенциальная энергия для математического маятника массой m и длиной l : - угол
- 11. Вычисляем собственную частоту свободных колебания маятника Пусть l = 98,1 м f = 0,05 Гц Т=
- 12. Рассмотрим растяжение стержня Применение метода перемещений для вывода коэффициентов матрицы жесткости стержневого элемента
- 13. Пример 3.3. Рассмотрим продольные колебания стержня с массой М на конце L = 2 м, сечение
- 14. L = 2 м, сечение прямоугольное шириной b = 5 см и высотой h = 3
- 15. Рассмотрим кручение стержня
- 16. Iх = MR2 /2 Пример 3.4. Рассмотрим крутильные колебания вала с диском на конце с моментом
- 18. Скачать презентацию
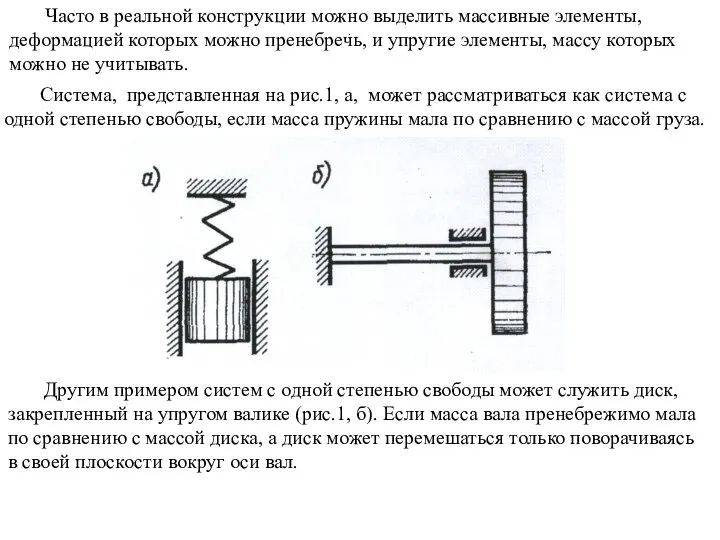
Часто в реальной конструкции можно выделить массивные элементы, деформацией которых можно
Часто в реальной конструкции можно выделить массивные элементы, деформацией которых можно
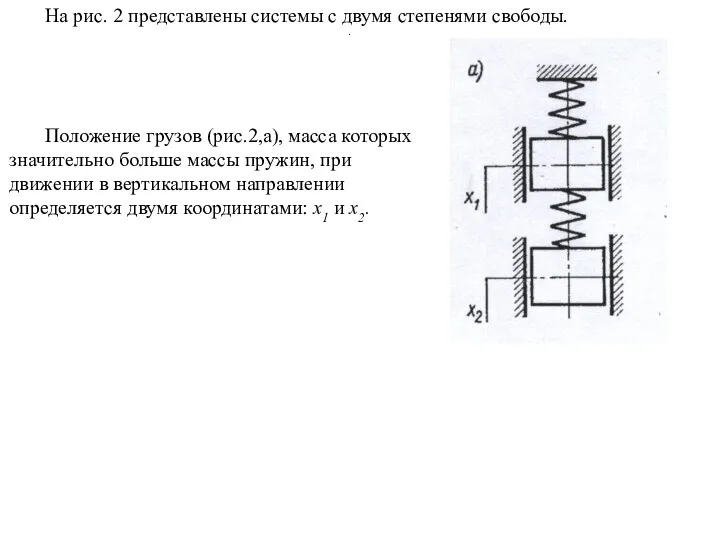
На рис. 2 представлены системы с двумя степенями свободы.
Положение грузов
На рис. 2 представлены системы с двумя степенями свободы.
Положение грузов
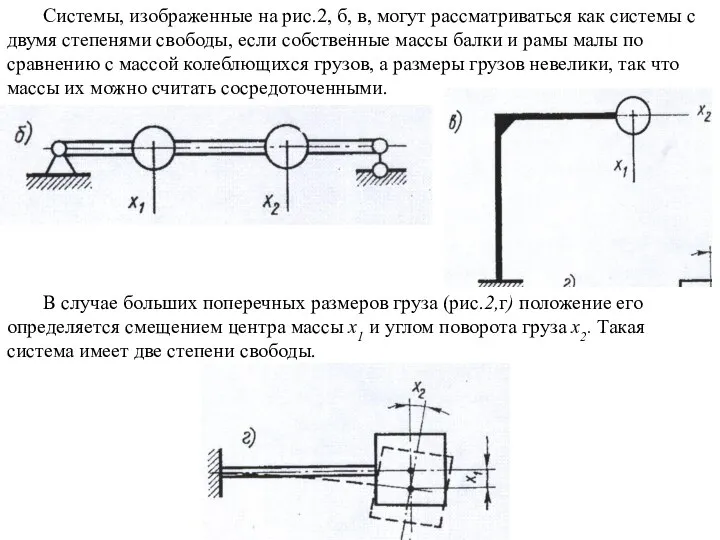
Системы, изображенные на рис.2, б, в, могут рассматриваться как системы с
Системы, изображенные на рис.2, б, в, могут рассматриваться как системы с
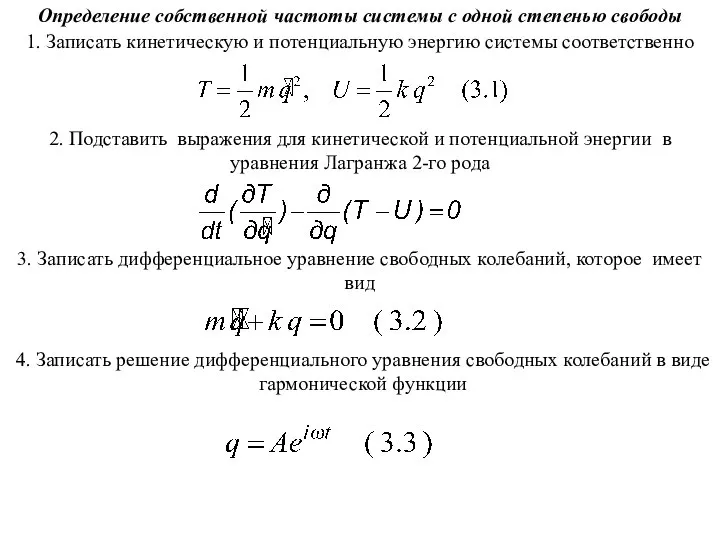
Определение собственной частоты системы с одной степенью свободы
1. Записать кинетическую и
Определение собственной частоты системы с одной степенью свободы
1. Записать кинетическую и
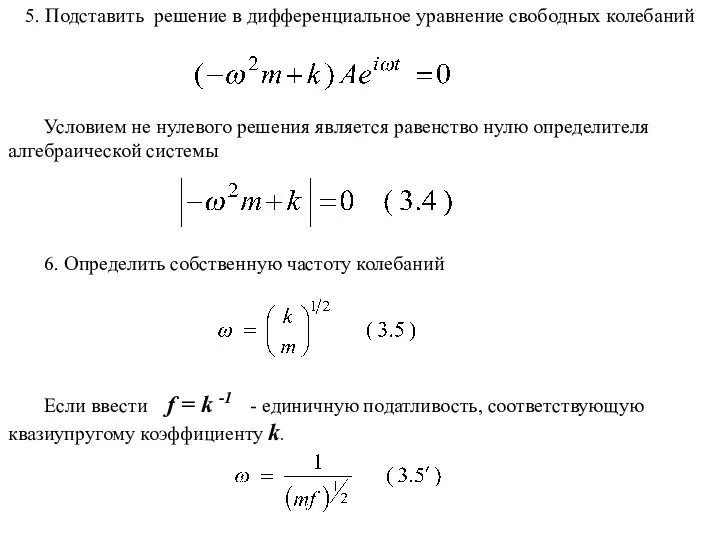
6. Определить собственную частоту колебаний
Если ввести f = k -1 -
6. Определить собственную частоту колебаний
Если ввести f = k -1 -
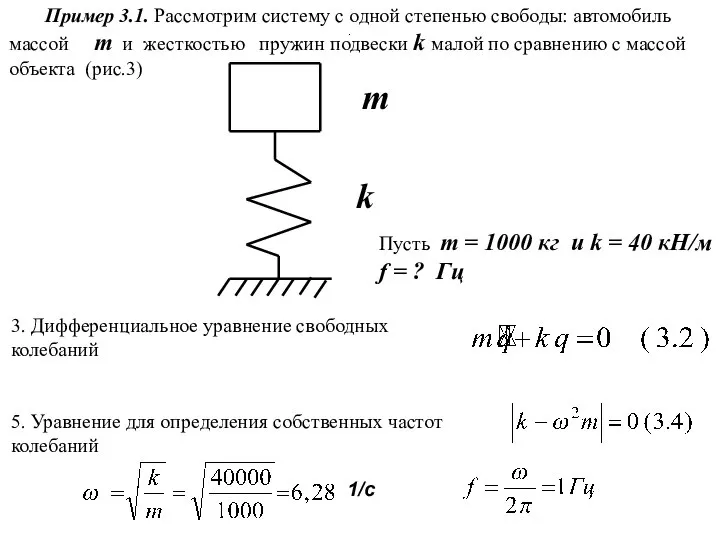
Пример 3.1. Рассмотрим систему с одной степенью свободы: автомобиль массой m
Пример 3.1. Рассмотрим систему с одной степенью свободы: автомобиль массой m
Пример 3.2
Рассмотрим математический маятник массой m и длиной l
l
m
mg
Пример 3.2
Рассмотрим математический маятник массой m и длиной l
l
m
mg
Математический маятник Фуко в Национальном соборе г. Мехико
Математический маятник Фуко в Национальном соборе г. Мехико
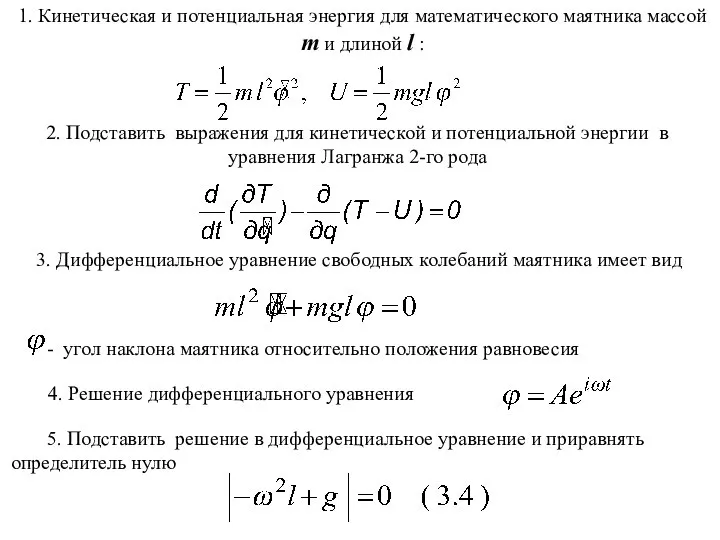
1. Кинетическая и потенциальная энергия для математического маятника массой m и
1. Кинетическая и потенциальная энергия для математического маятника массой m и
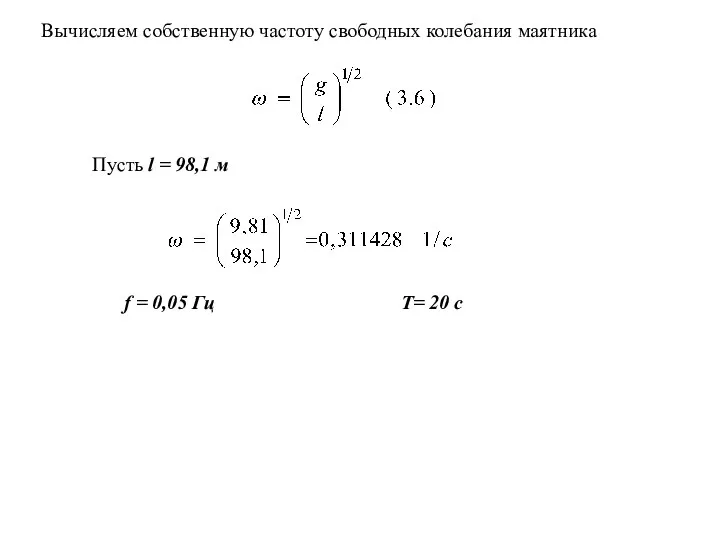
Вычисляем собственную частоту свободных колебания маятника
Пусть l = 98,1 м
Вычисляем собственную частоту свободных колебания маятника
Пусть l = 98,1 м
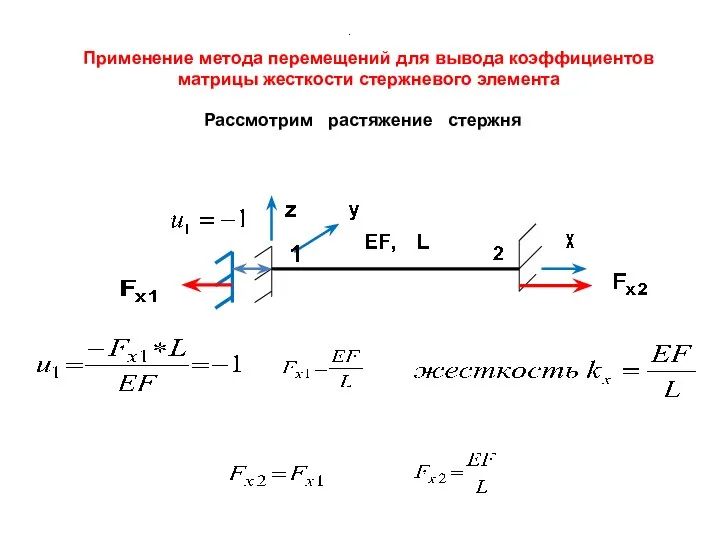
Рассмотрим растяжение стержня
Применение метода перемещений для вывода коэффициентов
матрицы жесткости стержневого
Рассмотрим растяжение стержня
Применение метода перемещений для вывода коэффициентов
матрицы жесткости стержневого
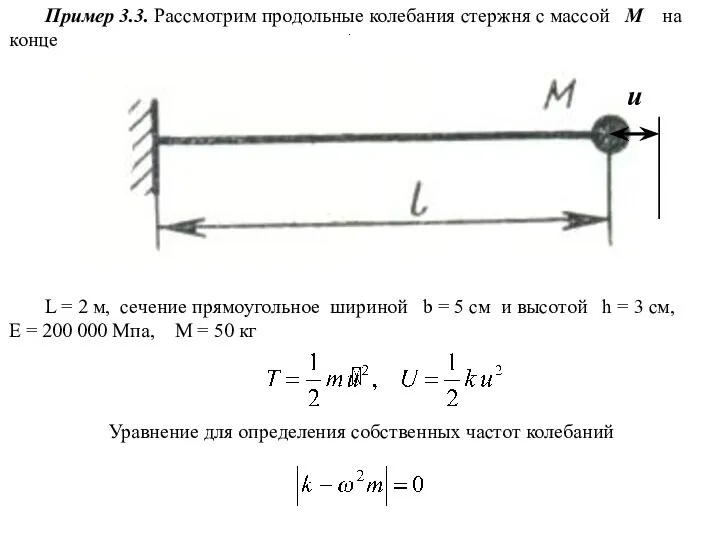
Пример 3.3. Рассмотрим продольные колебания стержня с массой М на конце
L
Пример 3.3. Рассмотрим продольные колебания стержня с массой М на конце
L
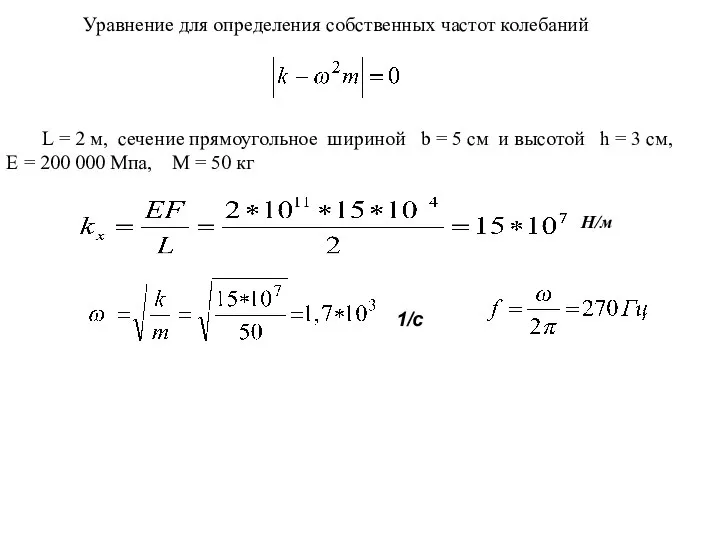
L = 2 м, сечение прямоугольное шириной b = 5 см
L = 2 м, сечение прямоугольное шириной b = 5 см
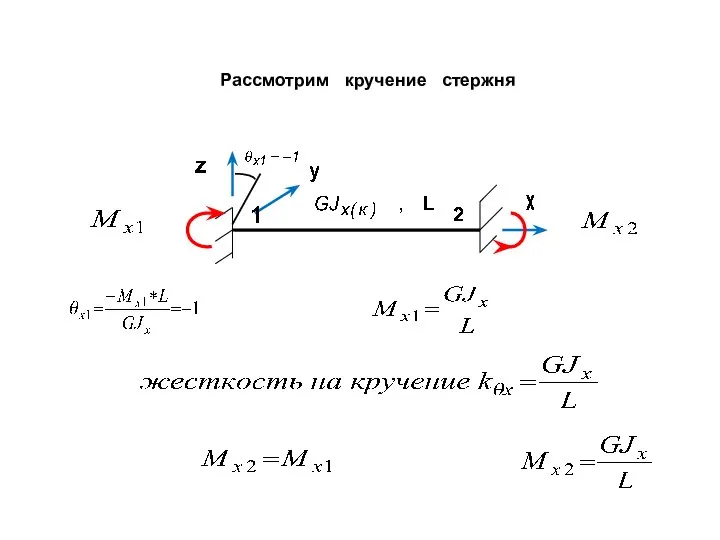
Рассмотрим кручение стержня
Рассмотрим кручение стержня
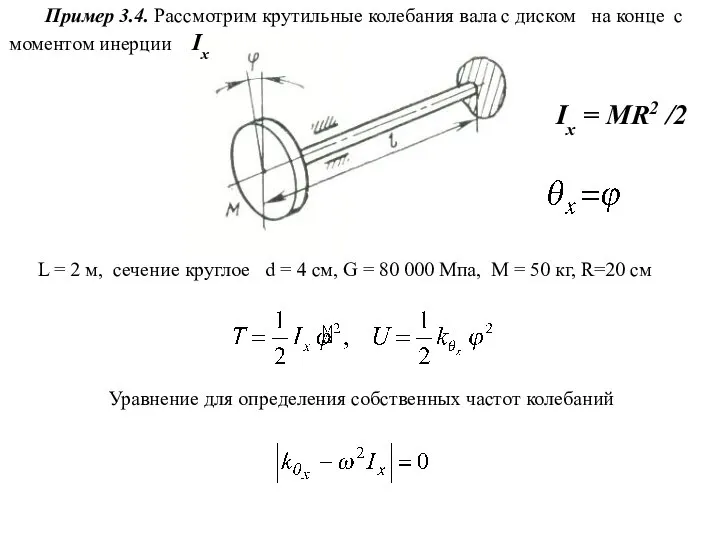
Iх = MR2 /2
Пример 3.4. Рассмотрим крутильные колебания вала
Iх = MR2 /2
Пример 3.4. Рассмотрим крутильные колебания вала
 Реактивное движение. Ракеты
Реактивное движение. Ракеты Магнитное поле Земли. Влияние магнитного поля Земли на человека
Магнитное поле Земли. Влияние магнитного поля Земли на человека Військові засоби зарядки акумуляторних батарей. Генератори постійного струму. (Тема 3.2)
Військові засоби зарядки акумуляторних батарей. Генератори постійного струму. (Тема 3.2) Лекция №6 (6 ). Поле системы элементарных излучателей
Лекция №6 (6 ). Поле системы элементарных излучателей Закон сохранения механической энергии. Механические колебания
Закон сохранения механической энергии. Механические колебания Понятие о радиоволнах. Деление волн на диапазоны. Основные физические свойства радиоволн. Распространение радиоволн
Понятие о радиоволнах. Деление волн на диапазоны. Основные физические свойства радиоволн. Распространение радиоволн Биофизика анализаторов. Модальность
Биофизика анализаторов. Модальность Работа и мощность силы. Консервативные силы, работа консервативных сил. Потенциальная и кинетическая энергия
Работа и мощность силы. Консервативные силы, работа консервативных сил. Потенциальная и кинетическая энергия Открытие радиоактивности. Радиоактивные превращения
Открытие радиоактивности. Радиоактивные превращения  Общие теоремы динамики материальной точки
Общие теоремы динамики материальной точки Аеродинаміка та динаміка польоту літака. Характеристики профілю крила. Центр тиску та фокус профілю. (Лекція 4.2.3)
Аеродинаміка та динаміка польоту літака. Характеристики профілю крила. Центр тиску та фокус профілю. (Лекція 4.2.3) Государственная система обеспечения единства измерений. Единицы величин
Государственная система обеспечения единства измерений. Единицы величин Поверхностное упрочнение деталей. (Лекция 11)
Поверхностное упрочнение деталей. (Лекция 11) Электротехника. Основные понятия и законы. (лекция 2)
Электротехника. Основные понятия и законы. (лекция 2) Аттестационная работа. Методическя разработка по физике: Замена человека на производстве роботизированный манипулятор
Аттестационная работа. Методическя разработка по физике: Замена человека на производстве роботизированный манипулятор История создания лампы накаливания Автор: учитель физики Зыков В.А., МБОУ СОШ №13 г. Балаково Саратовской области
История создания лампы накаливания Автор: учитель физики Зыков В.А., МБОУ СОШ №13 г. Балаково Саратовской области Альтернативные виды энергии
Альтернативные виды энергии Энергия и Момент Импульса (Energy and Angular Momentum)
Энергия и Момент Импульса (Energy and Angular Momentum) Лазерное излучение
Лазерное излучение Параметры антенн. Антенно-фидерные устройства и распространение радиоволн. Основы теории антенн
Параметры антенн. Антенно-фидерные устройства и распространение радиоволн. Основы теории антенн Особливості функціонування лінійних та нелінійних кіл. Зворотні зв'язки в електричних колах
Особливості функціонування лінійних та нелінійних кіл. Зворотні зв'язки в електричних колах Електричний заряд. Електростатичний захист
Електричний заряд. Електростатичний захист Машины постоянного тока. Устройство, материалы и принцип действия. Карточка 16
Машины постоянного тока. Устройство, материалы и принцип действия. Карточка 16 Механические волны
Механические волны Алгоритм решения задач по теме «Динамика»
Алгоритм решения задач по теме «Динамика» Дмитрий Аполлинариевич Рожанский
Дмитрий Аполлинариевич Рожанский Агрегатное состояние вещества Приготовила:Верхозина Анастасия
Агрегатное состояние вещества Приготовила:Верхозина Анастасия  Конвекция. Примеры конвекции
Конвекция. Примеры конвекции