- Криволинейное движение КМ по твердой опорной поверхности

Содержание
- 2. Колесная машина (КМ) практически всегда движется по криволинейной траектории. Для описания криволинейного движения КМ достаточно знать
- 3. Принято выделять условно прямолинейное движение по траектории с кривизной 1/Rп 500 м), а все остальное относить
- 4. Поворот – криволинейное движение, осуществляемое КМ под действием водителя. Параметры поворота могут быть описаны при известном
- 5. Основные кинематические показатели поворотливости: Rп – расчетный радиус поворота (расстояние от точки Оп до оси симметрии
- 6. В зависимости от решаемых задач оперируют такими понятиями, как: минимальный радиус поворота Rп1н – расстояние от
- 7. Процесс поворота состоит из трех этапов: вход в поворот – увеличение кривизны траектории движения центра масс;
- 8. КМ могут совершать поворот тремя основными способами: 1) поворотом плоскостей вращения колес управляемых осей относительно продольной
- 9. Рассмотрим указанные способы поворота в упрощенных схемах двухосных КМ без учета: эластичности шин; сил внешних сопротивлений;
- 10. Ведущие колеса наружного и внутреннего бортов задней оси создают одинаковые толкающие силы Px2н и Px2вн, которые
- 11. Поскольку внешних сил нет, то посередине передней оси (в точке А) от корпуса будет действовать та
- 12. Перемещению колеса по направлению действия силы Px1 препятствует сила сопротивления качению Pfx1 = f1·Rz1, а по
- 13. Качение колес передней оси возможно при условии Px1 > Pfx1. Подставляя выражения для этих сил и
- 14. Составляющая Px1 толкающей силы Px2 преодолевает силу сопротивления качению Pfx1 = Rx1, которая создает момент сопротивления
- 15. Во второй схеме (передний привод) составляющая Px1·cos θ силы тяги колес передней оси толкает колеса задней
- 16. Поворот сочлененных машин происходит как и при классическом способе, но с той разницей, что колеса одной
- 17. Механизмы бортового поворота обеспечивают разные линейные скорости колес наружного vкн и внутреннего vквн бортов КМ. Упрощенная
- 18. Рассмотренные упрощенные схемы дают только качественное представление о процессе поворота, т. е. каким образом КМ может
- 19. Первое условие можно приближенно записать в безразмерном виде: где fкрив – коэффициент сопротивления движению КМ при
- 20. При бортовом повороте неизбежно боковое скольжение колес, поэтому поворотливость КМ определяется условием
- 21. Кинематические и силовые параметры колесного движителя при криволинейном движении и действии боковой силы
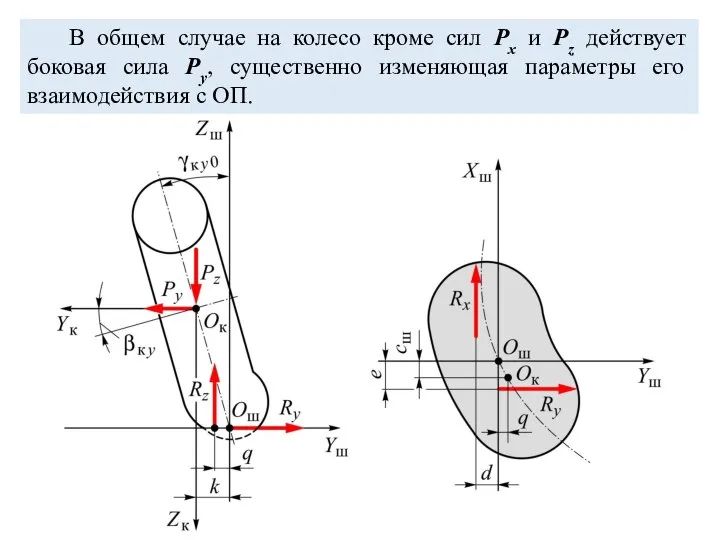
- 22. В общем случае на колесо кроме сил Px и Pz действует боковая сила Py, существенно изменяющая
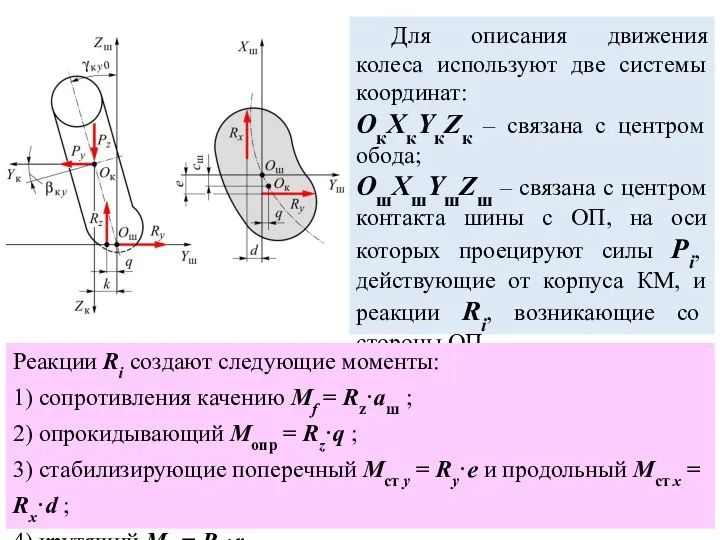
- 23. Для описания движения колеса используют две системы координат: OкXкYкZк – связана с центром обода; OшXшYшZш –
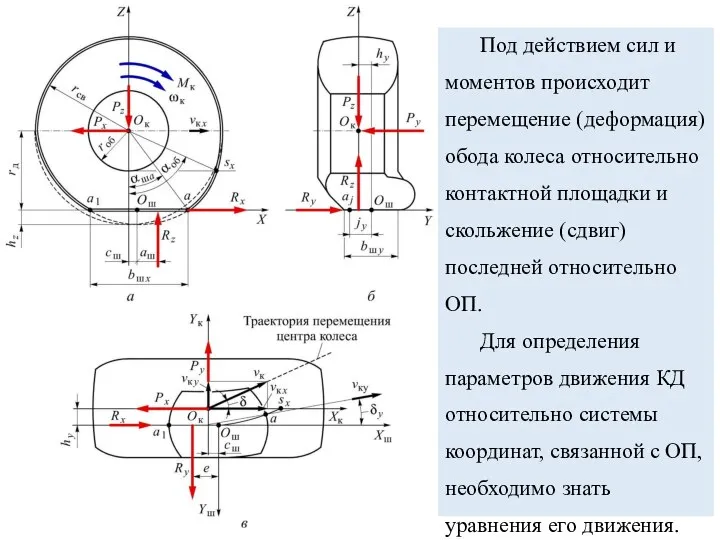
- 24. Под действием сил и моментов происходит перемещение (деформация) обода колеса относительно контактной площадки и скольжение (сдвиг)
- 25. Выделяют следующие случаи движения колеса под действием приложенных к нему сил: перемещение центра Oк относительно неподвижной
- 26. Шина становится несим-метричной относительно вертикальной плоскости, перпендикулярной к оси колеса и совпадающей с плоскостью симметрии шины.
- 27. Качение колеса, когда скорость направлена под углом к плоскости его вращения, называется боковым уводом, а сам
- 28. Эпюру элементарных боковых касательных сил можно заменить равнодействующей реакцией Ry, которая вследствие неравносторон-ности треугольника ABC смещена
- 29. Рассмотрим качение эластичного колеса при действии боковой силы по прямолинейной траектории (силовой увод). В результате этого
- 30. При отсутствии скольжения в зоне контакта: где bш x – длина контакта колеса с ОП. При
- 31. При действии силы Px = Rx центр обода смещается в продольном направлении на величину сш и
- 32. В этом случае составляющая vк y скорости центра колеса состоит из упругой скорости vк уy и
- 33. Изменение деформаций шин в зависимости от нагрузки и давления воздуха: а – для шин 1200×500–508 (1),
- 34. Изменение углов увода от нагрузок и давления воздуха в шинах: а – шина 6.40-13 мод. М-100
- 35. В теории колесных машин наиболее часто для описания взаимосвязи боковой силы Py и реализуемого угла увода
- 36. Согласно теории нелинейного бокового увода действительное значение ky определяется относительно некоторого фиксированного значения ky0 с помощью
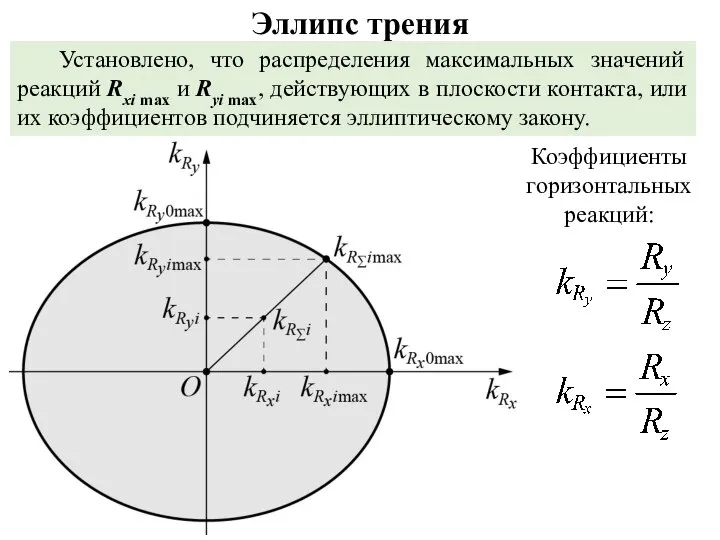
- 37. Эллипс трения Установлено, что распределения максимальных значений реакций Rxi max и Ryi max, действующих в плоскости
- 38. Эллипс трения Коэффициенты максимальных реакций в точках пересечения эллипса с его осями, т. е. при Ry
- 39. Эллипс трения Уравнение связи предельных значений коэффициентов: Предельные значения проекций на оси X и Y: В
- 40. На диаграмме распределения продольных и боковых реакций при качении радиальной шины с Рz = 3,2 кН
- 41. При Rx = const с увеличением угла увода δ реакция Ry возрастает, стабилизируясь при δ >
- 42. Отсутствие непосредственного скольжения Изменение коэффициента сопротивления боковому уводу при различной нормальной нагрузке
- 43. Изменение продольной реакции Rx в наибольшей мере сказывается на суммарном стабилизирующем моменте шины МстΣ, чем на
- 44. На коэффициент сопротивления боковому уводу ky в большей степени влияют: нормальная нагрузка Рz, давление воздуха в
- 45. При оценке устойчивости, управляемости и маневренности КМ необходимо выделить два случая движения: движение КМ с большими
- 46. При криволинейной траектории движения центра колеса Ок с малым радиусом Rпк происходит поворот колеса относительно пятна
- 47. В упрощенной расчетной схеме проекцию плоскости симметрии жесткого обода на горизонтальную плоскость в зоне контакта можно
- 48. Рассматривается кинематический увод при повороте колеса. В основном изменяется и оценивается момент сопротивления повороту, причем его
- 49. Суммарный угол δΣ, обусловленный углами силового δPy и кинематического δθ увода: При прямолинейном движении КМ угол
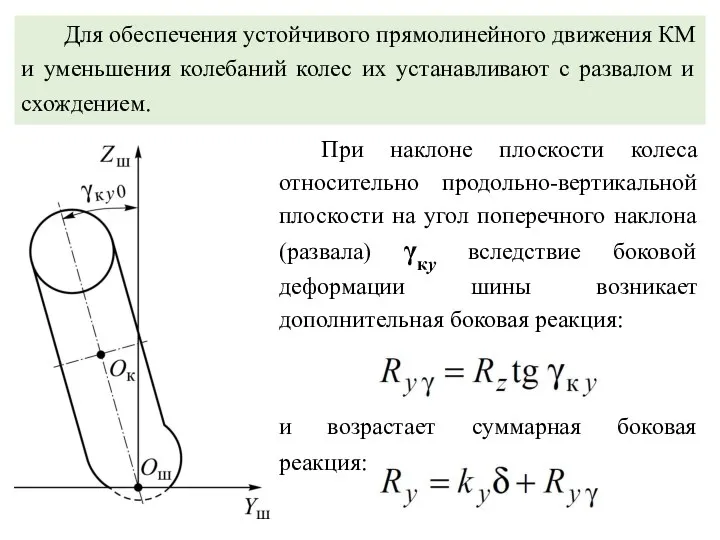
- 50. Для обеспечения устойчивого прямолинейного движения КМ и уменьшения колебаний колес их устанавливают с развалом и схождением.
- 51. Для определения боковой реакции по углу увода (Ry = kyγδ) необходимо корректировать коэффициент ky, полученный при
- 52. Правильно установленное на КМ с развалом и схождением колесо всегда катится с уводом, но при отсутствии
- 53. При оценке маневренности КМ большое значение имеют затраты энергии на криволинейное движение, а также моменты и
- 54. Рассмотренные выше зависимости Ry(δ) справедливы для установившегося криволинейного движения. Однако в ряде процессов, связанных с управляемостью
- 55. Rпш – радиус кривизны траектории центра пятна контакта шины. φR – угол между плоскостью вращения колеса
- 57. Скачать презентацию
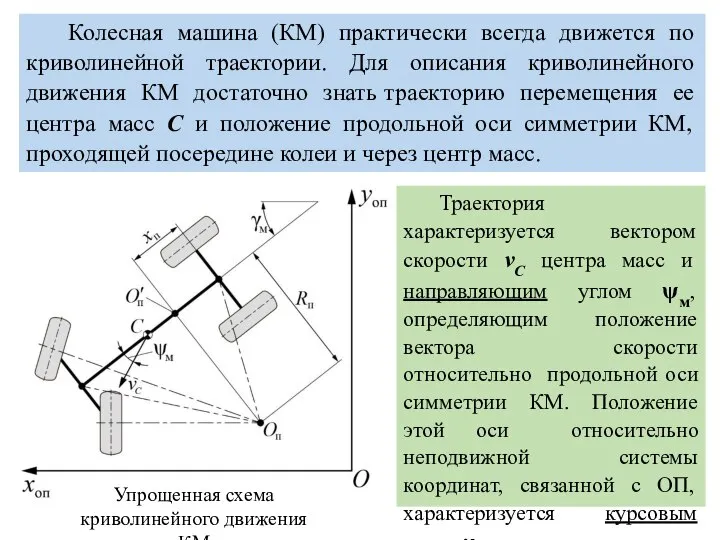
Колесная машина (КМ) практически всегда движется по криволинейной траектории. Для описания
Колесная машина (КМ) практически всегда движется по криволинейной траектории. Для описания
Принято выделять условно прямолинейное движение по траектории с кривизной 1/Rп <
Принято выделять условно прямолинейное движение по траектории с кривизной 1/Rп <
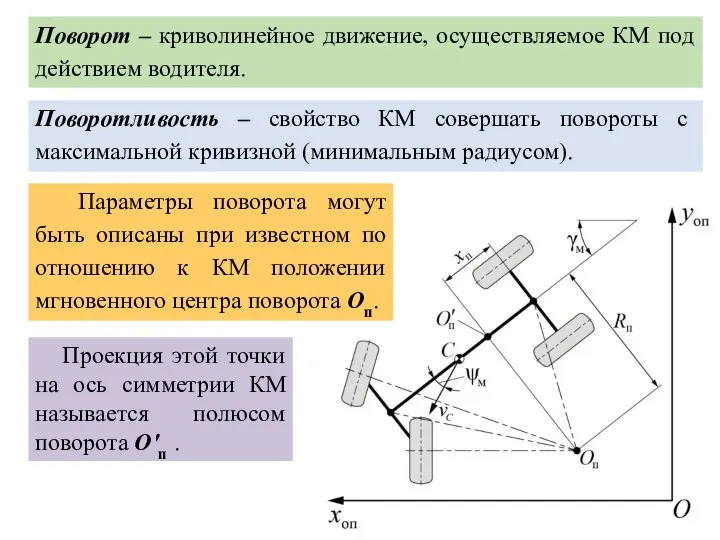
Поворот – криволинейное движение, осуществляемое КМ под действием водителя.
Параметры поворота могут
Поворот – криволинейное движение, осуществляемое КМ под действием водителя.
Параметры поворота могут
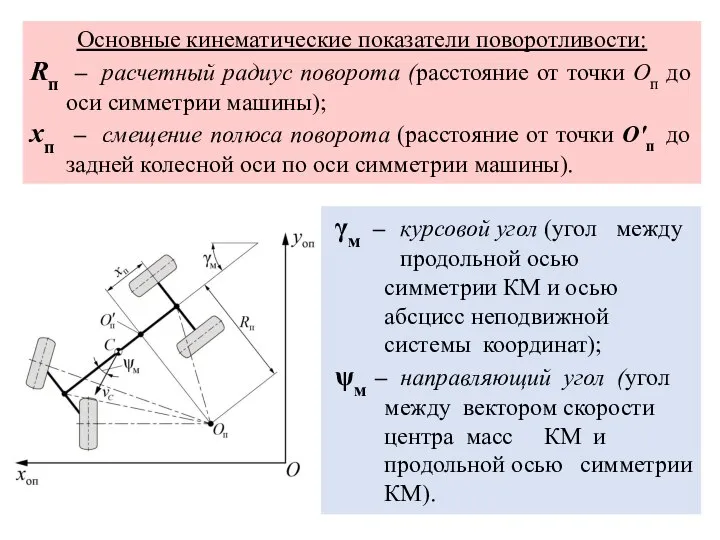
Основные кинематические показатели поворотливости:
Rп – расчетный радиус поворота (расстояние от
Основные кинематические показатели поворотливости:
Rп – расчетный радиус поворота (расстояние от

В зависимости от решаемых задач оперируют такими понятиями, как:
минимальный радиус поворота
В зависимости от решаемых задач оперируют такими понятиями, как:
минимальный радиус поворота

Процесс поворота состоит из трех этапов:
вход в поворот – увеличение
Процесс поворота состоит из трех этапов:
вход в поворот – увеличение

КМ могут совершать поворот тремя основными способами:
1) поворотом плоскостей вращения колес
КМ могут совершать поворот тремя основными способами:
1) поворотом плоскостей вращения колес

Рассмотрим указанные способы поворота в упрощенных схемах двухосных КМ без учета:
эластичности
Рассмотрим указанные способы поворота в упрощенных схемах двухосных КМ без учета:
эластичности
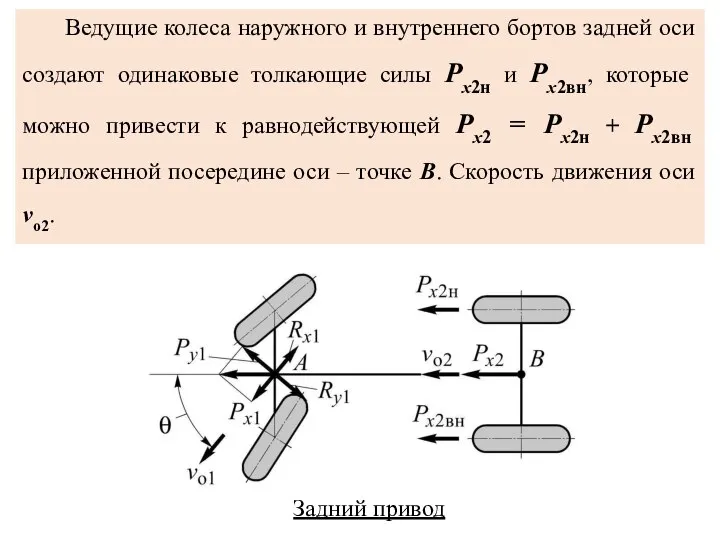
Ведущие колеса наружного и внутреннего бортов задней оси создают одинаковые толкающие
Ведущие колеса наружного и внутреннего бортов задней оси создают одинаковые толкающие

Поскольку внешних сил нет, то посередине передней оси (в точке А)
Поскольку внешних сил нет, то посередине передней оси (в точке А)
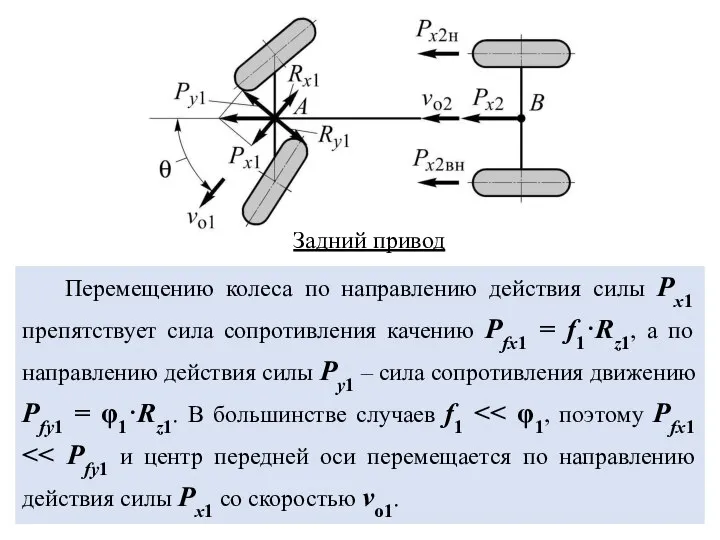
Перемещению колеса по направлению действия силы Px1 препятствует сила сопротивления качению
Перемещению колеса по направлению действия силы Px1 препятствует сила сопротивления качению
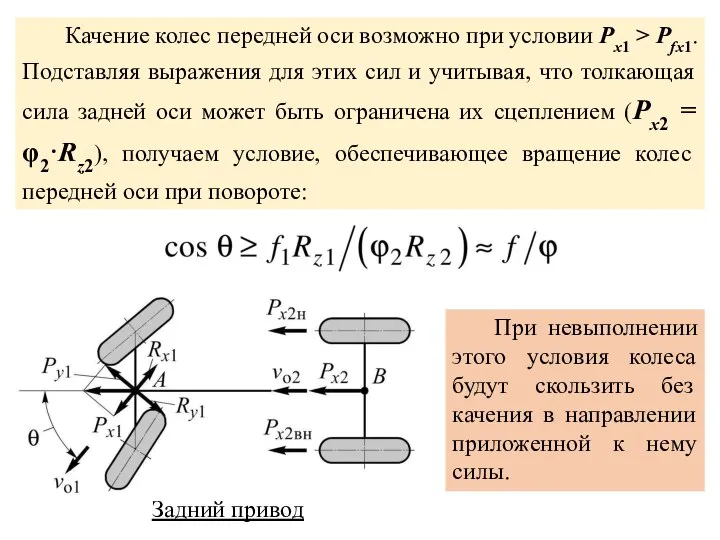
Качение колес передней оси возможно при условии Px1 > Pfx1. Подставляя
Качение колес передней оси возможно при условии Px1 > Pfx1. Подставляя

Составляющая Px1 толкающей силы Px2 преодолевает силу сопротивления качению Pfx1 =
Составляющая Px1 толкающей силы Px2 преодолевает силу сопротивления качению Pfx1 =
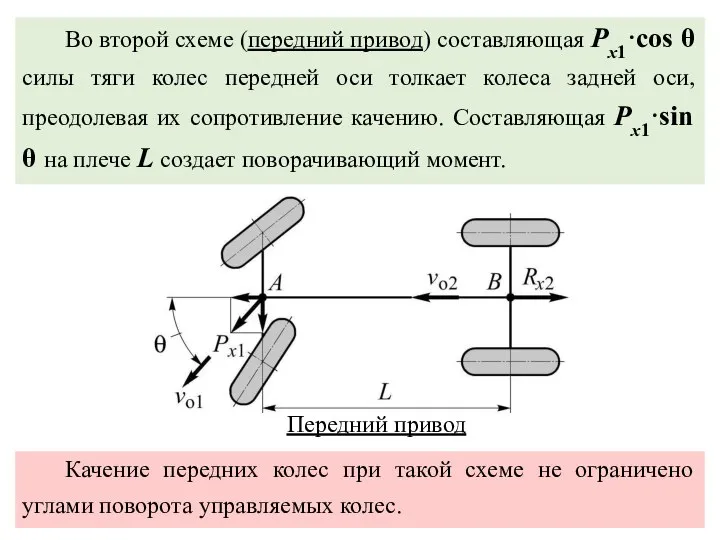
Во второй схеме (передний привод) составляющая Px1·cos θ силы тяги колес
Во второй схеме (передний привод) составляющая Px1·cos θ силы тяги колес

Поворот сочлененных машин происходит как и при классическом способе, но с
Поворот сочлененных машин происходит как и при классическом способе, но с
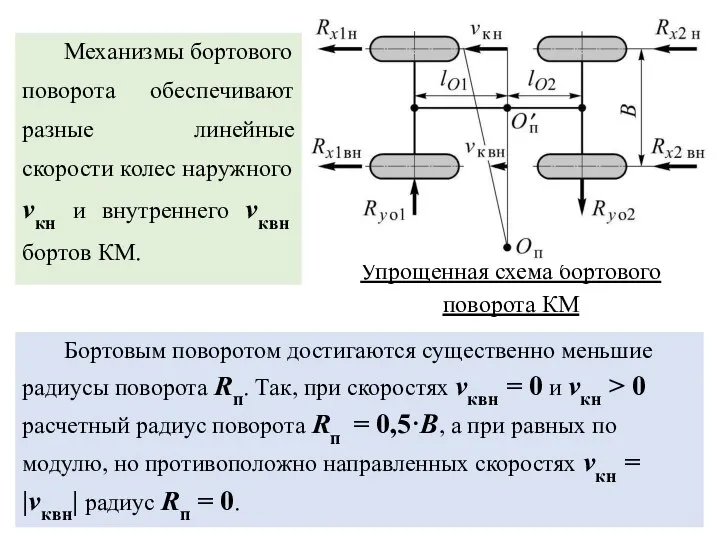
Механизмы бортового поворота обеспечивают разные линейные скорости колес наружного vкн и
Механизмы бортового поворота обеспечивают разные линейные скорости колес наружного vкн и
Рассмотренные упрощенные схемы дают только качественное представление о процессе поворота, т.
Рассмотренные упрощенные схемы дают только качественное представление о процессе поворота, т.
Первое условие можно приближенно записать в безразмерном виде:
где fкрив –
Первое условие можно приближенно записать в безразмерном виде:
где fкрив –
При бортовом повороте неизбежно боковое скольжение колес, поэтому поворотливость КМ определяется
При бортовом повороте неизбежно боковое скольжение колес, поэтому поворотливость КМ определяется
Кинематические и силовые параметры колесного движителя при криволинейном движении и действии
Кинематические и силовые параметры колесного движителя при криволинейном движении и действии
В общем случае на колесо кроме сил Px и Pz действует
В общем случае на колесо кроме сил Px и Pz действует
Для описания движения колеса используют две системы координат:
OкXкYкZк – связана
Для описания движения колеса используют две системы координат:
OкXкYкZк – связана
Под действием сил и моментов происходит перемещение (деформация) обода колеса относительно
Под действием сил и моментов происходит перемещение (деформация) обода колеса относительно
Выделяют следующие случаи движения колеса под действием приложенных к нему сил:
перемещение
Выделяют следующие случаи движения колеса под действием приложенных к нему сил:
перемещение
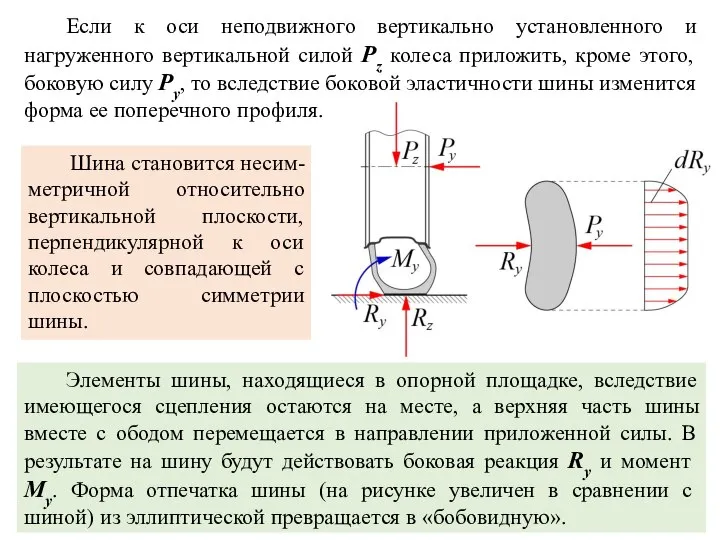
Шина становится несим-метричной относительно вертикальной плоскости, перпендикулярной к оси колеса и
Шина становится несим-метричной относительно вертикальной плоскости, перпендикулярной к оси колеса и
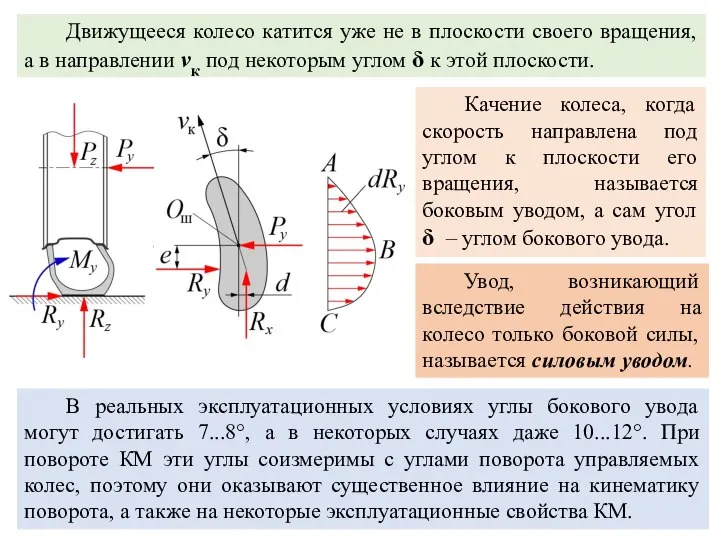
Качение колеса, когда скорость направлена под углом к плоскости его вращения,
Качение колеса, когда скорость направлена под углом к плоскости его вращения,
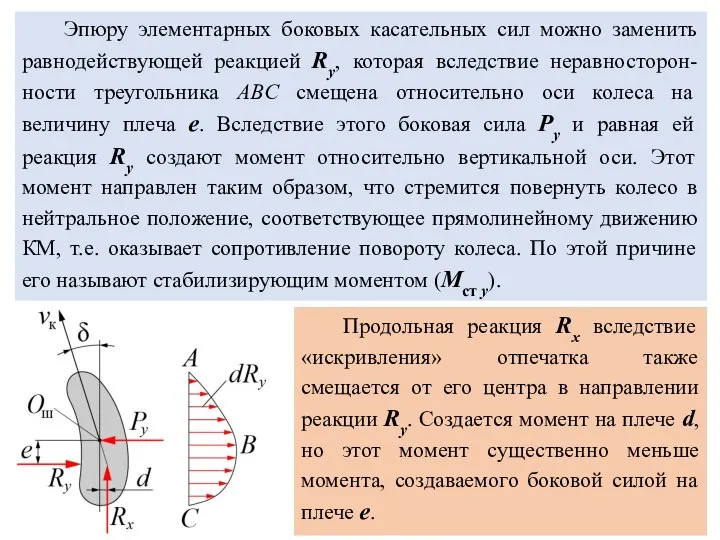
Эпюру элементарных боковых касательных сил можно заменить равнодействующей реакцией Ry, которая
Эпюру элементарных боковых касательных сил можно заменить равнодействующей реакцией Ry, которая
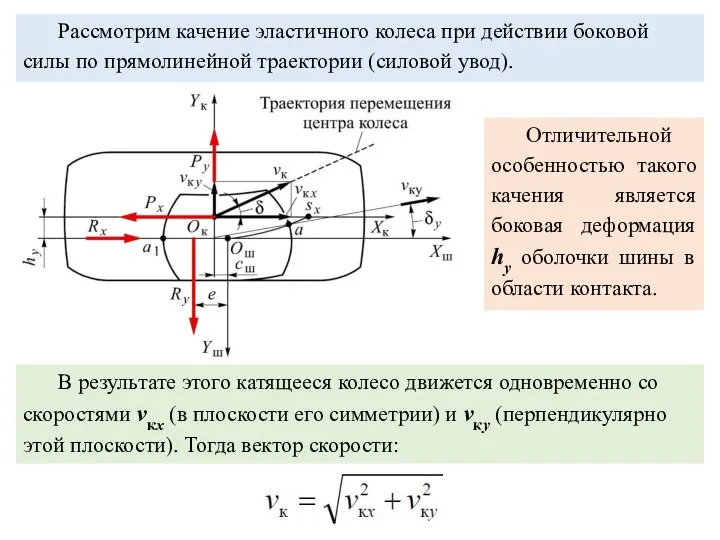
Рассмотрим качение эластичного колеса при действии боковой силы по прямолинейной траектории
Рассмотрим качение эластичного колеса при действии боковой силы по прямолинейной траектории
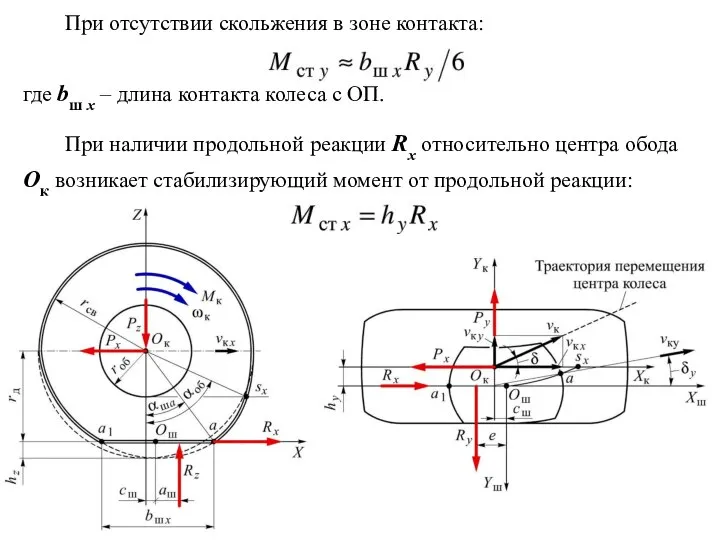
При отсутствии скольжения в зоне контакта:
где bш x – длина
При отсутствии скольжения в зоне контакта:
где bш x – длина
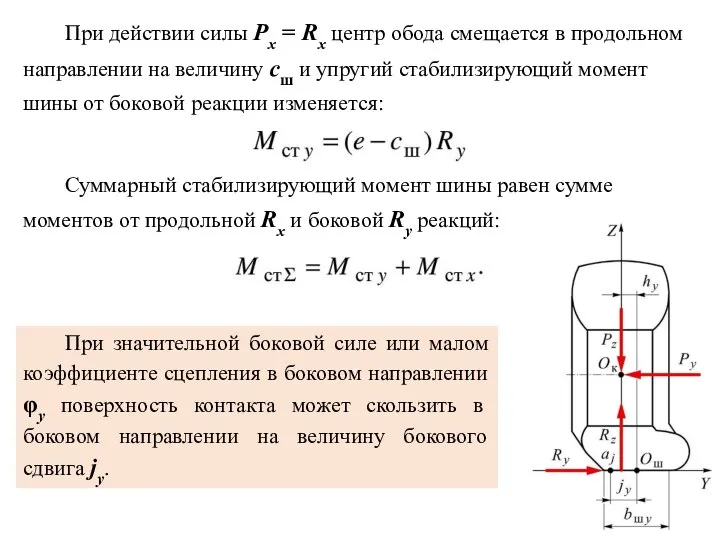
При действии силы Px = Rx центр обода смещается в продольном
При действии силы Px = Rx центр обода смещается в продольном
В этом случае составляющая vк y скорости центра колеса состоит из
В этом случае составляющая vк y скорости центра колеса состоит из
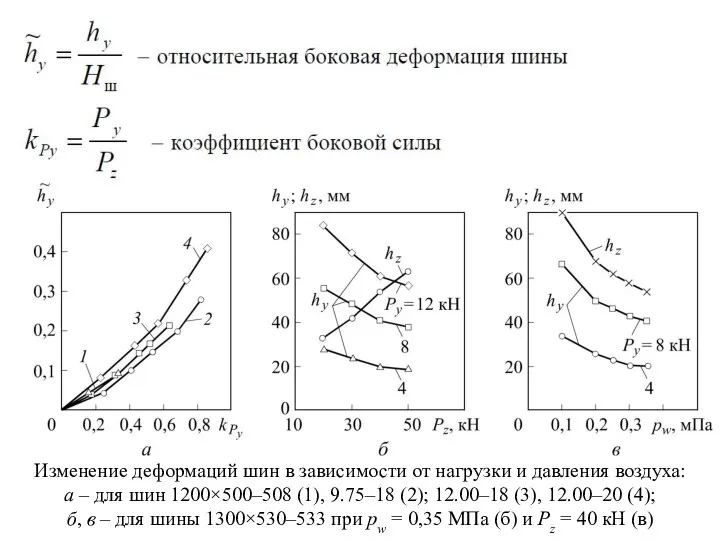
Изменение деформаций шин в зависимости от нагрузки и давления воздуха:
а
Изменение деформаций шин в зависимости от нагрузки и давления воздуха:
а
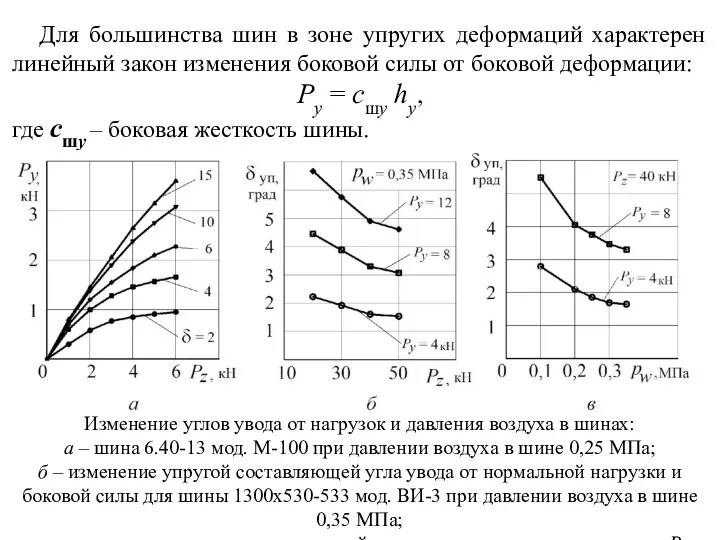
Изменение углов увода от нагрузок и давления воздуха в шинах:
а –
Изменение углов увода от нагрузок и давления воздуха в шинах:
а –

В теории колесных машин наиболее часто для описания взаимосвязи боковой силы
В теории колесных машин наиболее часто для описания взаимосвязи боковой силы
Согласно теории нелинейного бокового увода действительное значение ky определяется относительно некоторого
Согласно теории нелинейного бокового увода действительное значение ky определяется относительно некоторого
Эллипс трения
Установлено, что распределения максимальных значений реакций Rxi max и Ryi
Эллипс трения
Установлено, что распределения максимальных значений реакций Rxi max и Ryi

Эллипс трения
Коэффициенты максимальных реакций в точках пересечения эллипса с его осями,
Эллипс трения
Коэффициенты максимальных реакций в точках пересечения эллипса с его осями,

Эллипс трения
Уравнение связи предельных значений коэффициентов:
Предельные значения проекций на оси
Эллипс трения
Уравнение связи предельных значений коэффициентов:
Предельные значения проекций на оси

На диаграмме распределения продольных и боковых реакций при качении радиальной шины
На диаграмме распределения продольных и боковых реакций при качении радиальной шины

При Rx = const с увеличением угла увода δ реакция Ry
При Rx = const с увеличением угла увода δ реакция Ry
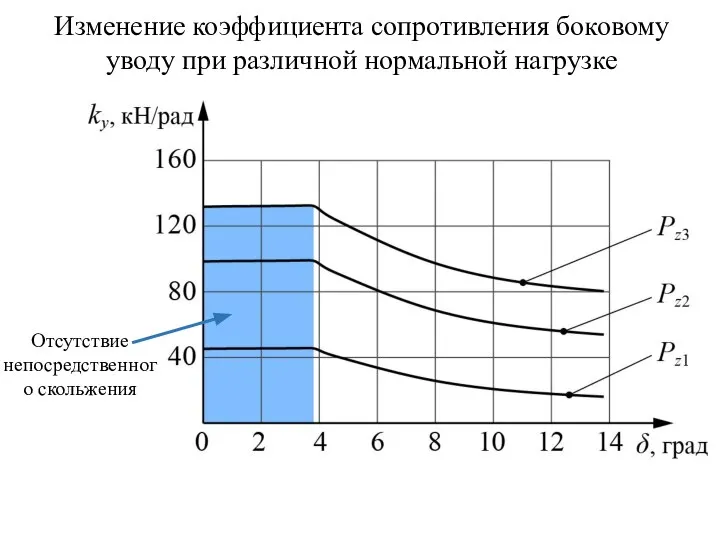
Отсутствие
непосредственного скольжения
Изменение коэффициента сопротивления боковому уводу при различной нормальной нагрузке
Отсутствие
непосредственного скольжения
Изменение коэффициента сопротивления боковому уводу при различной нормальной нагрузке
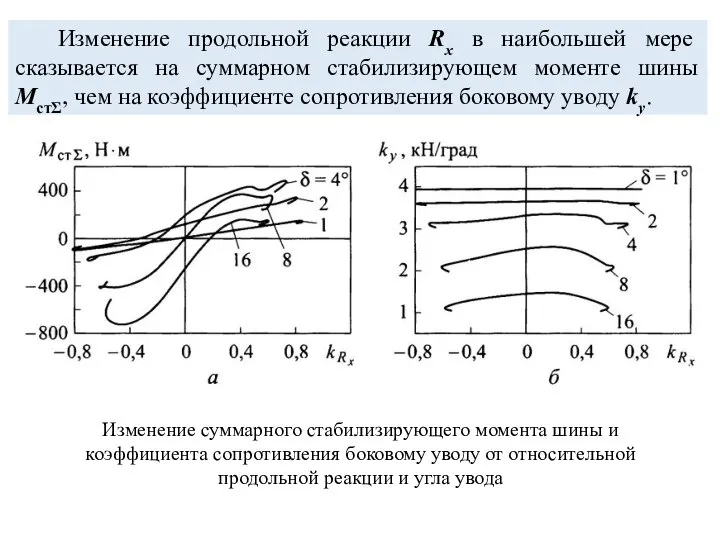
Изменение продольной реакции Rx в наибольшей мере сказывается на суммарном стабилизирующем
Изменение продольной реакции Rx в наибольшей мере сказывается на суммарном стабилизирующем
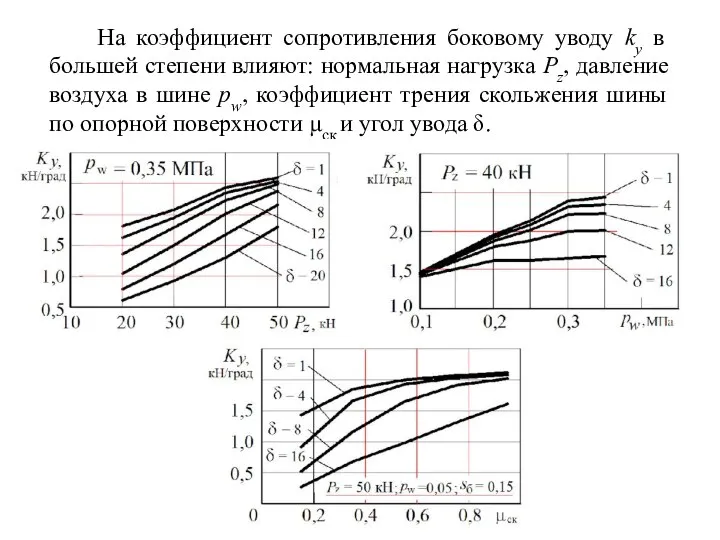
На коэффициент сопротивления боковому уводу ky в большей степени влияют: нормальная
На коэффициент сопротивления боковому уводу ky в большей степени влияют: нормальная
При оценке устойчивости, управляемости и маневренности КМ необходимо выделить два случая
При оценке устойчивости, управляемости и маневренности КМ необходимо выделить два случая
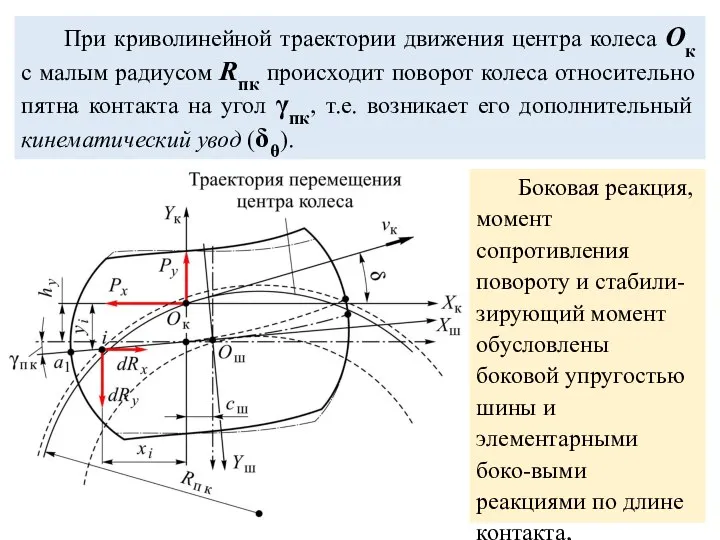
При криволинейной траектории движения центра колеса Ок с малым радиусом Rпк
При криволинейной траектории движения центра колеса Ок с малым радиусом Rпк
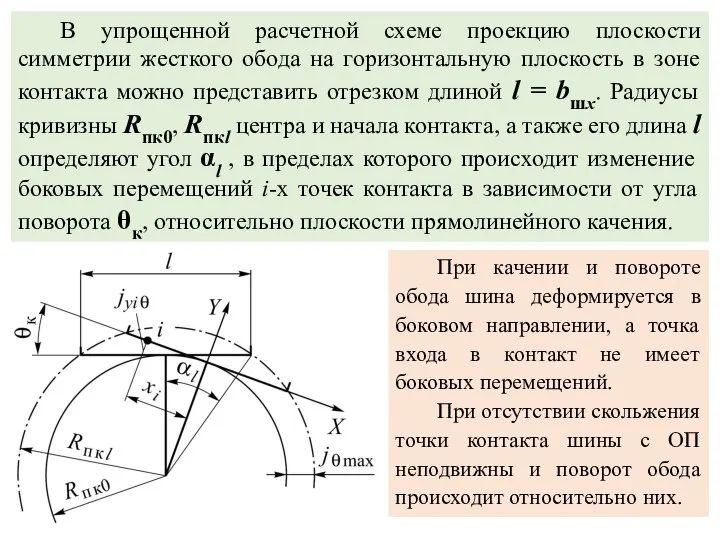
В упрощенной расчетной схеме проекцию плоскости симметрии жесткого обода на горизонтальную
В упрощенной расчетной схеме проекцию плоскости симметрии жесткого обода на горизонтальную
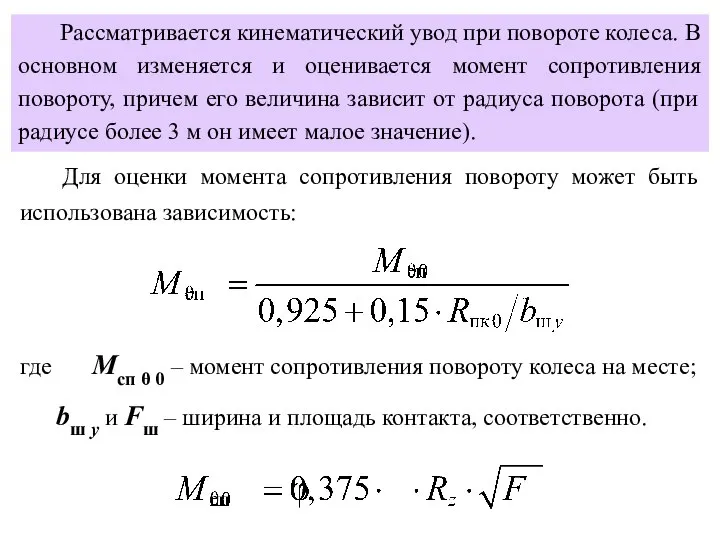
Рассматривается кинематический увод при повороте колеса. В основном изменяется и оценивается
Рассматривается кинематический увод при повороте колеса. В основном изменяется и оценивается
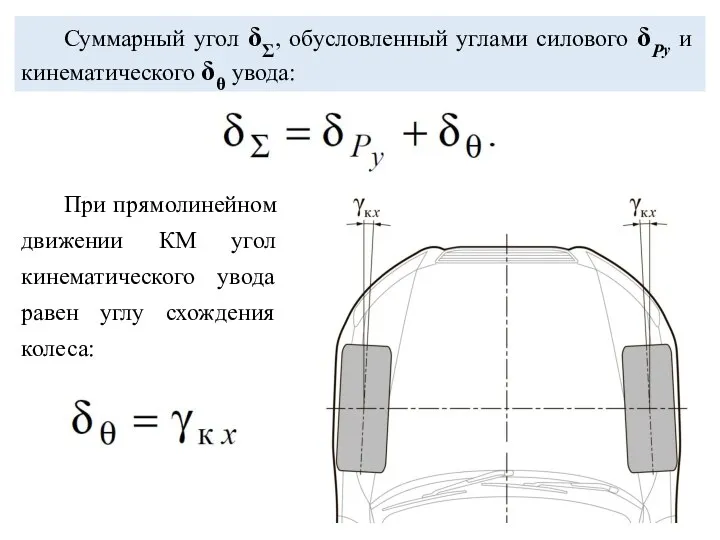
Суммарный угол δΣ, обусловленный углами силового δPy и кинематического δθ увода:
При
Суммарный угол δΣ, обусловленный углами силового δPy и кинематического δθ увода:
При
Для обеспечения устойчивого прямолинейного движения КМ и уменьшения колебаний колес их
Для обеспечения устойчивого прямолинейного движения КМ и уменьшения колебаний колес их
Для определения боковой реакции по углу увода (Ry = kyγδ) необходимо
Для определения боковой реакции по углу увода (Ry = kyγδ) необходимо
Правильно установленное на КМ с развалом и схождением колесо всегда катится
Правильно установленное на КМ с развалом и схождением колесо всегда катится
При оценке маневренности КМ большое значение имеют затраты энергии на криволинейное
При оценке маневренности КМ большое значение имеют затраты энергии на криволинейное
Рассмотренные выше зависимости Ry(δ) справедливы для установившегося криволинейного движения. Однако в
Рассмотренные выше зависимости Ry(δ) справедливы для установившегося криволинейного движения. Однако в
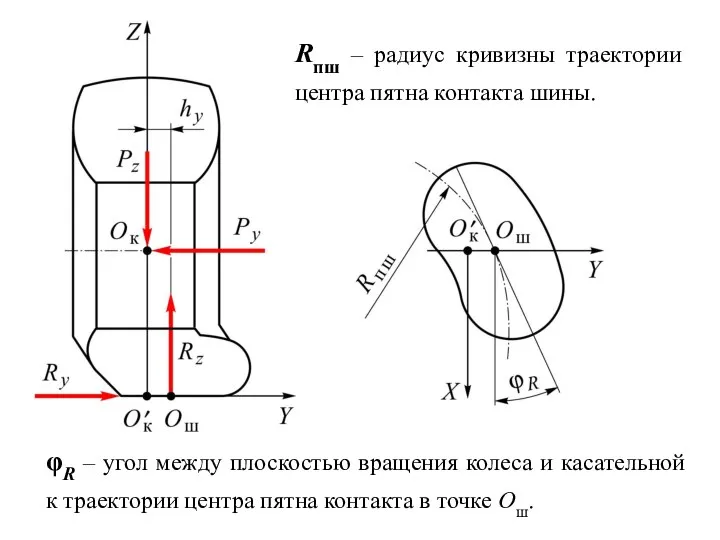
Rпш – радиус кривизны траектории центра пятна контакта шины.
φR – угол
Rпш – радиус кривизны траектории центра пятна контакта шины.
φR – угол
 Четвертое состояние вещества плазма
Четвертое состояние вещества плазма Преобразования электрических цепей
Преобразования электрических цепей Электричество. Постоянный электрический ток
Электричество. Постоянный электрический ток Расчёт массы и объема тела по его плотности
Расчёт массы и объема тела по его плотности История создания тепловых двигателей
История создания тепловых двигателей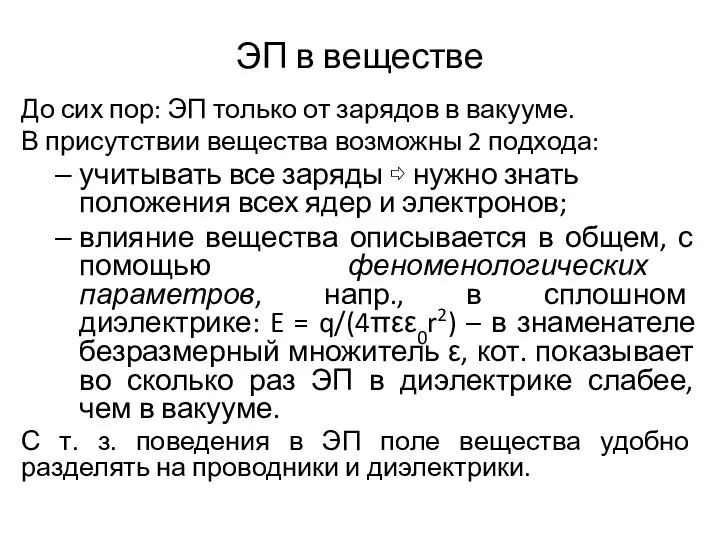 Электрическое поле в веществе
Электрическое поле в веществе Элементарные частицы
Элементарные частицы Численное моделирование в среде Geant4 элементов протонной радиографической установки
Численное моделирование в среде Geant4 элементов протонной радиографической установки Давление света. Опыты П.Н.Лебедева © В.Е. Фрадкин, 2004
Давление света. Опыты П.Н.Лебедева © В.Е. Фрадкин, 2004 Оптика. Ход лучей в призме
Оптика. Ход лучей в призме Ременная передача
Ременная передача Сила. Графічне зображення сил
Сила. Графічне зображення сил Основные параметры импульсной лазерной закалки и характеристики упрочненной поверхности
Основные параметры импульсной лазерной закалки и характеристики упрочненной поверхности Изобретение радио А.С. Поповым
Изобретение радио А.С. Поповым Оптические измерения. Введение. Основные термины и определения. Погрешности измерений
Оптические измерения. Введение. Основные термины и определения. Погрешности измерений Теория упругости сплошных сред. Упругие поля (поля напряжений) вокруг дислокаций. Энергия дислокаций
Теория упругости сплошных сред. Упругие поля (поля напряжений) вокруг дислокаций. Энергия дислокаций Инерция Урок физики в 7 классе Ножовская средняя общеобразовательная школа Пермский край Учитель
Инерция Урок физики в 7 классе Ножовская средняя общеобразовательная школа Пермский край Учитель  Свободные затухающие колебания. Вынужденные колебания. Резонанс
Свободные затухающие колебания. Вынужденные колебания. Резонанс Петрофизика. Проницаемость горных пород
Петрофизика. Проницаемость горных пород Основи спектроскопії. Характеристика і діапазони електромагнітного випромінювання
Основи спектроскопії. Характеристика і діапазони електромагнітного випромінювання Электрический ток в металлах
Электрический ток в металлах А.С. Попов – изобретатель радио
А.С. Попов – изобретатель радио Пристрій для астрономічних спостережень - телескоп
Пристрій для астрономічних спостережень - телескоп Презентация по физике "Уравнение состояния идеального газа" - скачать
Презентация по физике "Уравнение состояния идеального газа" - скачать  Испарение лазером
Испарение лазером Электрофизические свойства проводниковых материалов
Электрофизические свойства проводниковых материалов Уравнение Менделеева - Клапейрона
Уравнение Менделеева - Клапейрона Дослід Торрічеллі. Вимірювання тиску стовпа рідини
Дослід Торрічеллі. Вимірювання тиску стовпа рідини